- ОПТИМИЗАЦИЯ ПЕРЕЛЕТОВ С МАЛОЙ ТЯГОЙ В ЗАДАЧЕ ТРЕХ ТЕЛ

Содержание
- 2. Метод транспортирующей траектории (МТТ) Метод приближенной оптимизации перелетов с идеально регулируемой малой тягой между двумя заданными
- 3. Модифицированный МТТ Инерциальная система координат Полностью аналитическое решение для постоянной мощности Решение в квадратурах для произвольного
- 4. МТТ в произвольном поле сил α – вектор реактивного ускорения КА (тяга) – уравнение движения, g
- 5. МТТ в произвольном поле сил Свойства: Матрица S = S(t, t + Δt) является невырожденной положительно
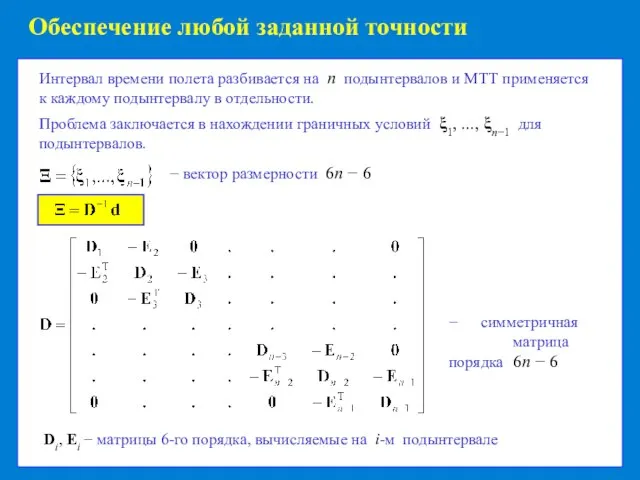
- 6. Обеспечение любой заданной точности Интервал времени полета разбивается на n подынтервалов и МТТ применяется к каждому
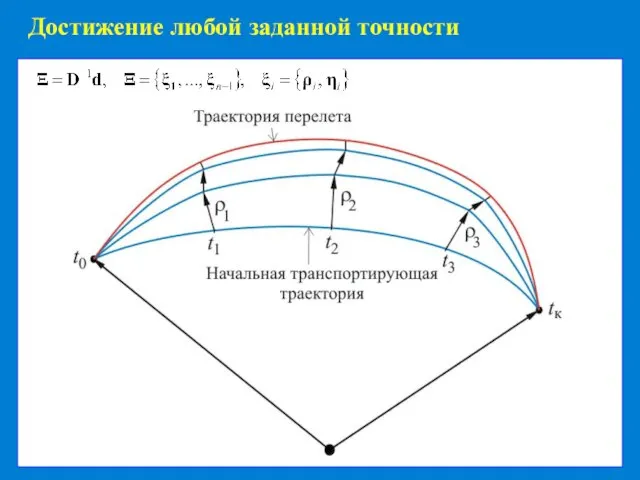
- 7. Достижение любой заданной точности
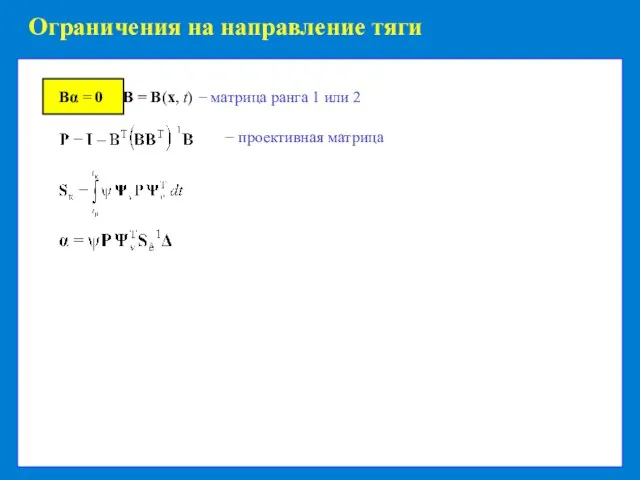
- 8. Ограничения на направление тяги − проективная матрица Bα = 0 B = B(x, t) − матрица
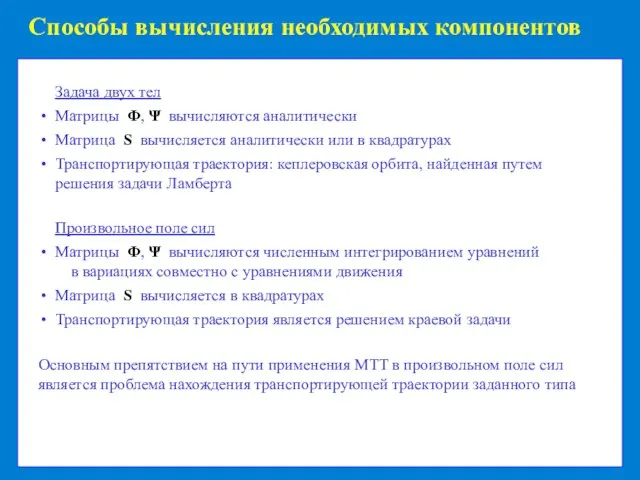
- 9. Способы вычисления необходимых компонентов Произвольное поле сил Матрицы Φ, Ψ вычисляются численным интегрированием уравнений в вариациях
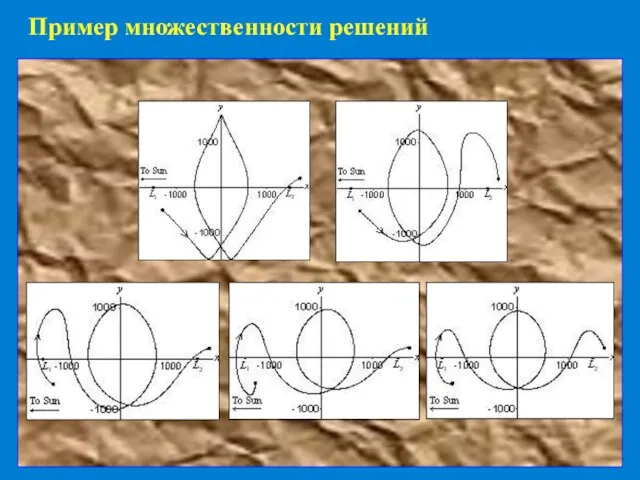
- 10. Пример множественности решений
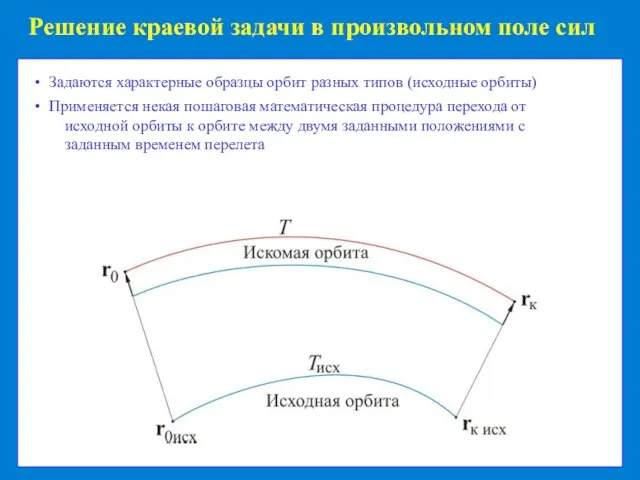
- 11. Решение краевой задачи в произвольном поле сил Задаются характерные образцы орбит разных типов (исходные орбиты) Применяется
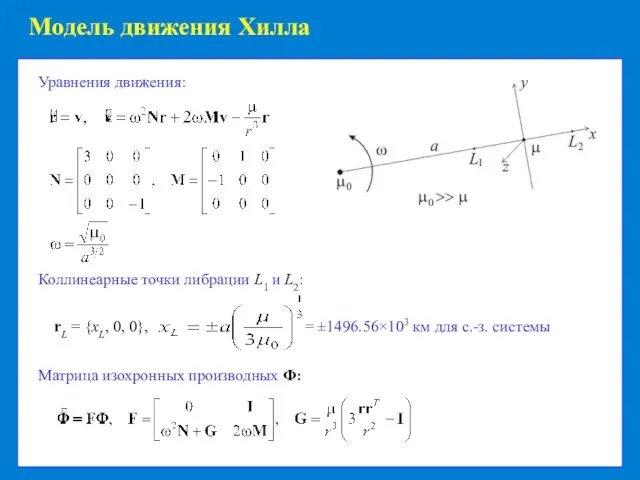
- 12. Модель движения Хилла Уравнения движения: Коллинеарные точки либрации L1 и L2: Матрица изохронных производных Ф:
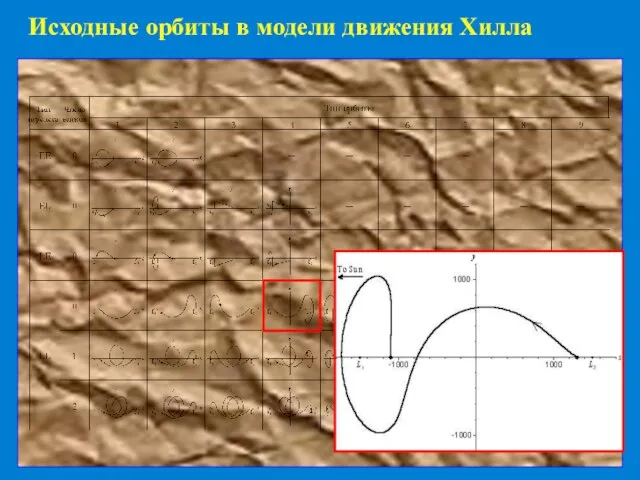
- 13. Исходные орбиты в модели движения Хилла
- 14. Демонстрация метода
- 15. Перелет Земля − гало-орбита Относительная ошибка минимизируемого функционала Плохая сходимость при 7 ≤ n ≤ 20
- 16. Перелет между гало-орбитами Относительная ошибка минимизируемого функционала Плохая сходимость при n ≥ 15
- 18. Скачать презентацию
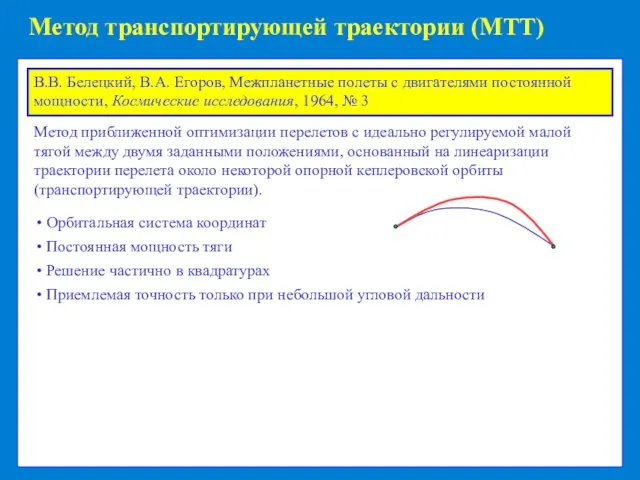
Слайд 2Метод транспортирующей траектории (МТТ)
Метод приближенной оптимизации перелетов с идеально регулируемой малой тягой
Метод транспортирующей траектории (МТТ)
Метод приближенной оптимизации перелетов с идеально регулируемой малой тягой
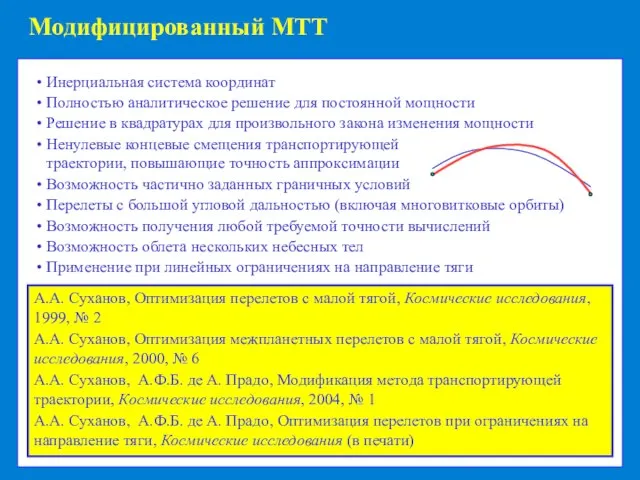
Слайд 3Модифицированный МТТ
Инерциальная система координат
Полностью аналитическое решение для постоянной мощности
Решение в квадратурах для
Модифицированный МТТ
Инерциальная система координат
Полностью аналитическое решение для постоянной мощности
Решение в квадратурах для
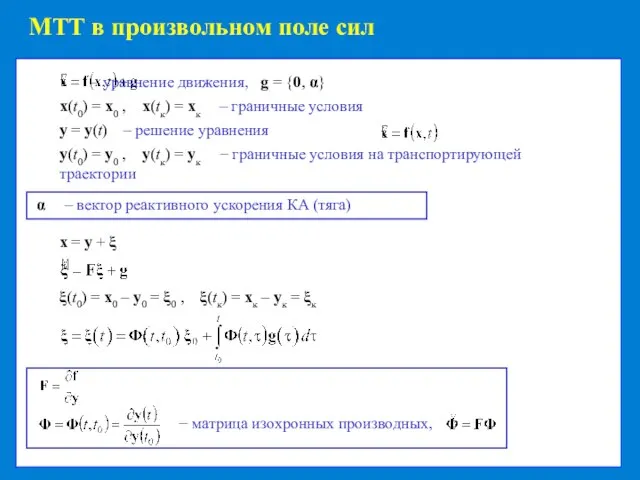
Слайд 4МТТ в произвольном поле сил
α – вектор реактивного ускорения КА (тяга)
– уравнение
МТТ в произвольном поле сил
α – вектор реактивного ускорения КА (тяга)
– уравнение
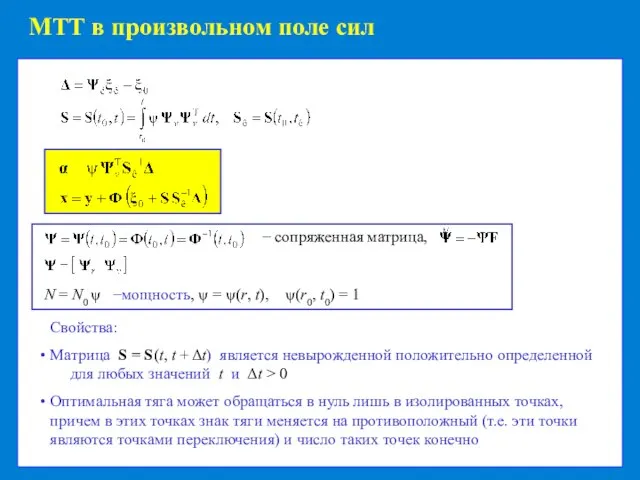
Слайд 5МТТ в произвольном поле сил
Свойства:
Матрица S = S(t, t + Δt) является невырожденной положительно определенной для любых
МТТ в произвольном поле сил
Свойства:
Матрица S = S(t, t + Δt) является невырожденной положительно определенной для любых
Слайд 6Обеспечение любой заданной точности
Интервал времени полета разбивается на n подынтервалов и МТТ
Обеспечение любой заданной точности
Интервал времени полета разбивается на n подынтервалов и МТТ
Слайд 7Достижение любой заданной точности
Достижение любой заданной точности
Слайд 8Ограничения на направление тяги
− проективная матрица
Bα = 0 B = B(x, t) − матрица ранга 1 или 2
Ограничения на направление тяги
− проективная матрица
Bα = 0 B = B(x, t) − матрица ранга 1 или 2
Слайд 9Способы вычисления необходимых компонентов
Произвольное поле сил
Матрицы Φ, Ψ вычисляются численным интегрированием уравнений
Способы вычисления необходимых компонентов
Произвольное поле сил
Матрицы Φ, Ψ вычисляются численным интегрированием уравнений
Слайд 10Пример множественности решений
Пример множественности решений
Слайд 11Решение краевой задачи в произвольном поле сил
Задаются характерные образцы орбит разных типов
Решение краевой задачи в произвольном поле сил
Задаются характерные образцы орбит разных типов
Слайд 12Модель движения Хилла
Уравнения движения:
Коллинеарные точки либрации L1 и L2:
Матрица изохронных производных Ф:
Модель движения Хилла
Уравнения движения:
Коллинеарные точки либрации L1 и L2:
Матрица изохронных производных Ф:
Слайд 13Исходные орбиты в модели движения Хилла
Исходные орбиты в модели движения Хилла
Слайд 14Демонстрация метода
Демонстрация метода
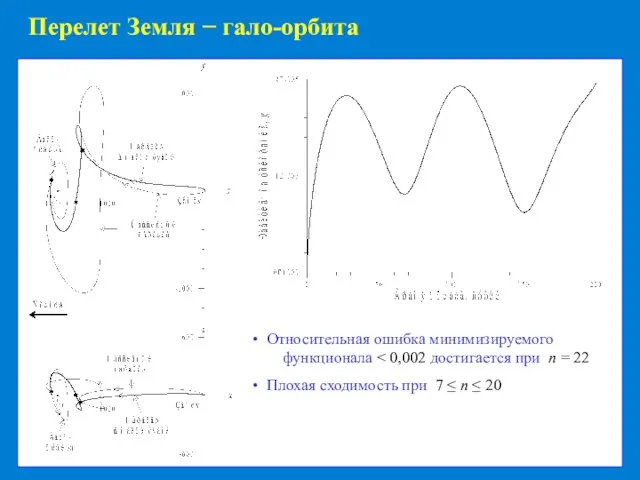
Слайд 15Перелет Земля − гало-орбита
Относительная ошибка минимизируемого функционала < 0,002 достигается при n
Перелет Земля − гало-орбита
Относительная ошибка минимизируемого функционала < 0,002 достигается при n
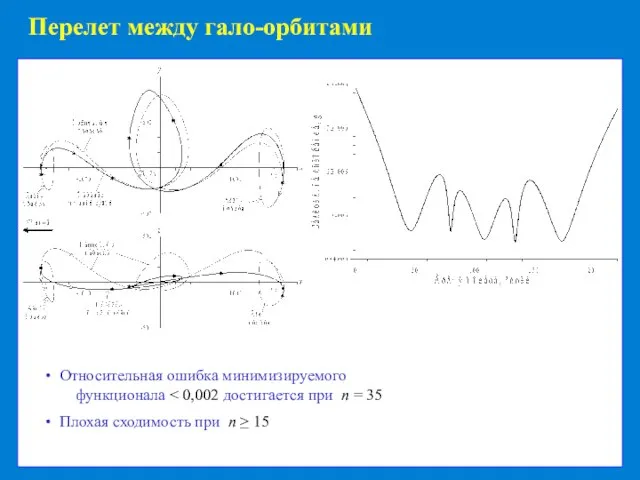
Слайд 16Перелет между гало-орбитами
Относительная ошибка минимизируемого функционала < 0,002 достигается при n =
Перелет между гало-орбитами
Относительная ошибка минимизируемого функционала < 0,002 достигается при n =
 Презентация на тему Химические синонимы
Презентация на тему Химические синонимы ПРЕЗЕНТАЦИЯ ООО МиА-Фуд
ПРЕЗЕНТАЦИЯ ООО МиА-Фуд Особенности территориальной организации местного самоуправления в Севастополе
Особенности территориальной организации местного самоуправления в Севастополе Психология бизнеса Организационное поведение
Психология бизнеса Организационное поведение  История развития компьютерной техники
История развития компьютерной техники Способы зажигания дуги
Способы зажигания дуги Цвет и зрительные иллюзии.
Цвет и зрительные иллюзии. Сабашевский сельский клуб Мелеузовского района Республики Башкортостан
Сабашевский сельский клуб Мелеузовского района Республики Башкортостан Изучение лексики на уроках русского языка
Изучение лексики на уроках русского языка Education jobs
Education jobs Азы перспективы
Азы перспективы pishem-izlozhenie-koshki-4-klass-umk-shkola-21-veka
pishem-izlozhenie-koshki-4-klass-umk-shkola-21-veka Сравнение эффективности работы московского монорельса и Серпуховско-Тимирязевской линии метрополитена
Сравнение эффективности работы московского монорельса и Серпуховско-Тимирязевской линии метрополитена Операции по техническому обслуживанию оборудования для первичной обработки, хранения и транспортирования молока
Операции по техническому обслуживанию оборудования для первичной обработки, хранения и транспортирования молока Презентация[1]
Презентация[1] «Ломоносов был великий человек…» (А.С.Пушкин)
«Ломоносов был великий человек…» (А.С.Пушкин) Комильфо-викторина. Визит в театр
Комильфо-викторина. Визит в театр Русская религиозная философия XIX-ХХ вв. Горбатов В.В.
Русская религиозная философия XIX-ХХ вв. Горбатов В.В. Святочные гадания
Святочные гадания Масштаб
Масштаб Лекция 5. Экспертиза проектной документации
Лекция 5. Экспертиза проектной документации Spinal disease
Spinal disease Тестовые задания
Тестовые задания Интеллектуальные системы в проектировании зданий. Понятие умного дома
Интеллектуальные системы в проектировании зданий. Понятие умного дома Грани культуры
Грани культуры PSC-300
PSC-300 Экскурсия в город Ковров
Экскурсия в город Ковров Орешек знания тверд. Но все же мы не привыкли отступать! Нам расколоть его поможет Девиз «Хочу все знать!»
Орешек знания тверд. Но все же мы не привыкли отступать! Нам расколоть его поможет Девиз «Хочу все знать!»