- Основные подходы в решении задач на распознавание

Содержание
- 2. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
- 3. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
- 4. Задача распознавания формы ладони бинарное изображение ладони граничное представление ...
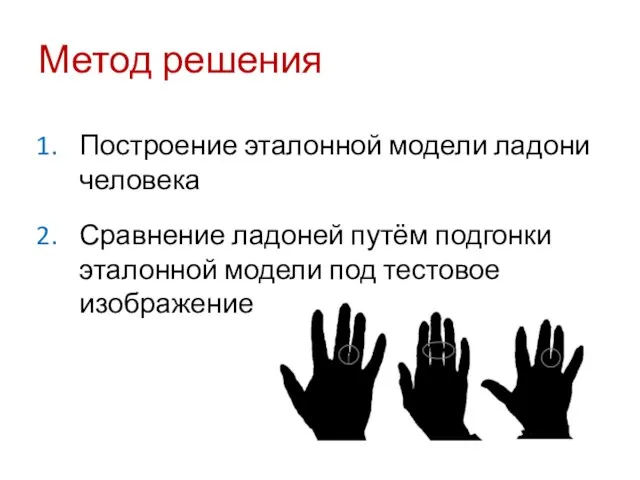
- 5. Метод решения Построение эталонной модели ладони человека Сравнение ладоней путём подгонки эталонной модели под тестовое изображение
- 6. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
- 7. Гибкий объект Семейство кругов C={ct,t∊T} – циркулярный граф Объединение кругов (как точечных множеств) S=⋃ct, t∊T –
- 8. Трансформации Основные движения сдвиг ладони поворот ладони поворот пальцев Допустимые трансформации сдвиг циркулярного графа поворот циркулярного
- 9. Разметка ладони Основные шаги Выделение пальцев Определение точек поворотов пальцев Обозначения кончики: P1, P2, P3, P4
- 10. Сравнение формы ладоней Эталонная ладонь G1 Тестовая ладонь G2
- 11. Сравнение формы ладоней Совмещение кончиков средних пальцев (точка P3) Совмещение осей средних пальцев (прямая P3R3) Исключение
- 12. Подгонка Площадь ладони в среднем – 40000 пикселей Эталонная ладонь G1 Тестовая ладонь G2 Начальное совмещение
- 13. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
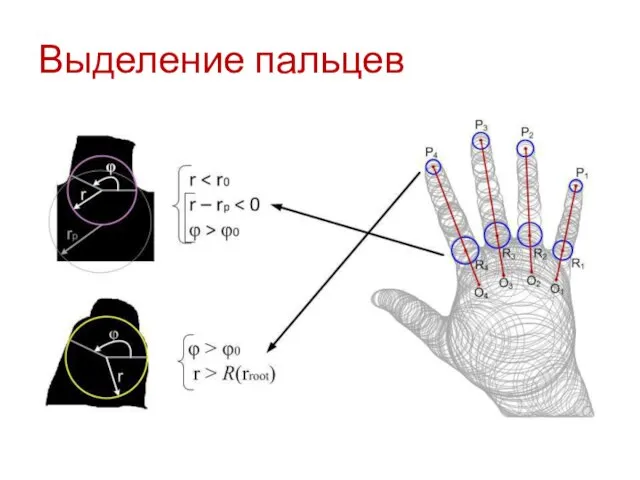
- 14. Выделение пальцев
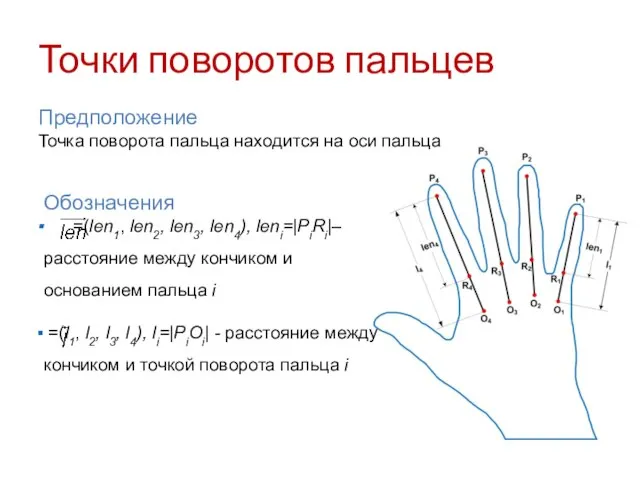
- 15. Точки поворотов пальцев Предположение Точка поворота пальца находится на оси пальца Обозначения =(len1, len2, len3, len4),
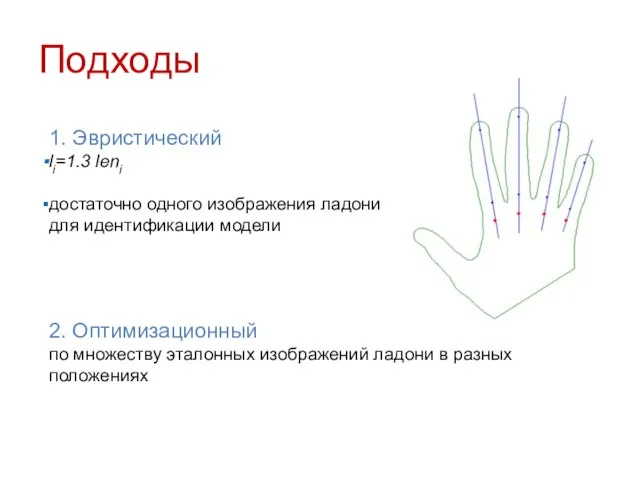
- 16. Подходы 1. Эвристический li=1.3 leni достаточно одного изображения ладони для идентификации модели 2. Оптимизационный по множеству
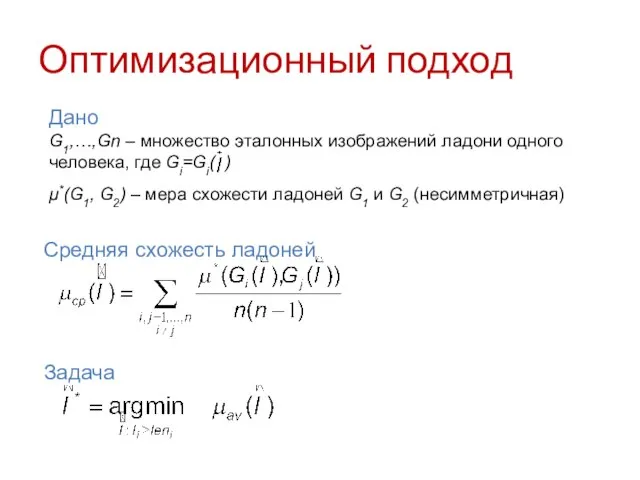
- 17. Оптимизационный подход Дано G1,…,Gn – множество эталонных изображений ладони одного человека, где Gi=Gi( ) μ*(G1, G2)
- 18. Оптимизационный подход Решение перебор: li∊[1.25 leni, 1.5 leni] численные методы … Пример l1 = 1.25 len1
- 19. Пример Эвристический подход Оптимизационный подход: полный перебор Оптимизационный подход: метод Нелдера-Мида
- 20. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
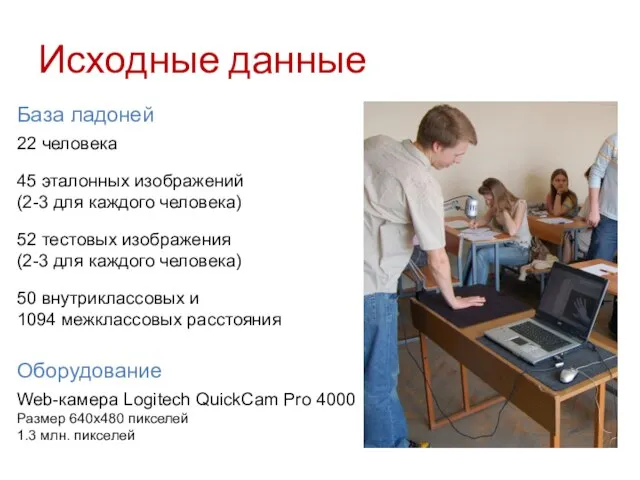
- 21. Исходные данные База ладоней 22 человека 45 эталонных изображений (2-3 для каждого человека) 52 тестовых изображения
- 23. Скачать презентацию
Слайд 3Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Слайд 4Задача распознавания формы ладони
бинарное изображение ладони
граничное представление
...
Задача распознавания формы ладони
бинарное изображение ладони
граничное представление
...

Слайд 5Метод решения
Построение эталонной модели ладони человека
Сравнение ладоней путём подгонки эталонной модели под
Метод решения
Построение эталонной модели ладони человека
Сравнение ладоней путём подгонки эталонной модели под
Слайд 6Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
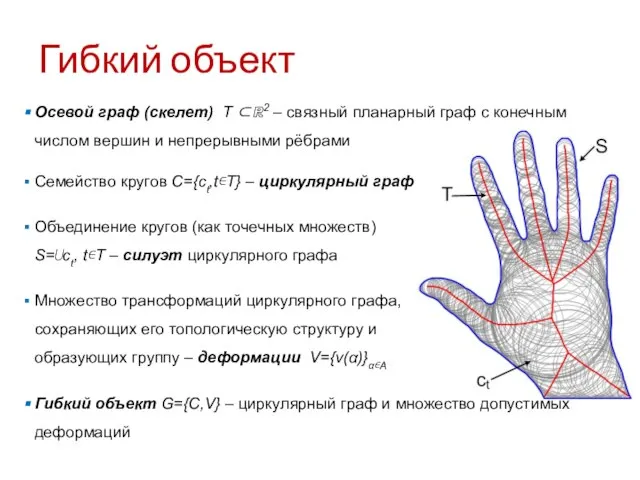
Слайд 7Гибкий объект
Семейство кругов C={ct,t∊T} – циркулярный граф
Объединение кругов (как точечных множеств) S=⋃ct,
Гибкий объект
Семейство кругов C={ct,t∊T} – циркулярный граф
Объединение кругов (как точечных множеств) S=⋃ct,
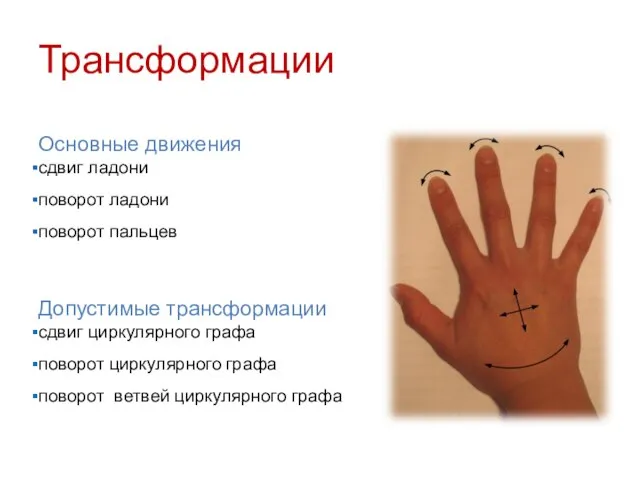
Слайд 8Трансформации
Основные движения
сдвиг ладони
поворот ладони
поворот пальцев
Допустимые трансформации
сдвиг циркулярного графа
поворот циркулярного графа
поворот ветвей циркулярного
Трансформации
Основные движения
сдвиг ладони
поворот ладони
поворот пальцев
Допустимые трансформации
сдвиг циркулярного графа
поворот циркулярного графа
поворот ветвей циркулярного
Слайд 9Разметка ладони
Основные шаги
Выделение пальцев
Определение точек поворотов пальцев
Обозначения
кончики: P1, P2, P3, P4
основания: O1,
Разметка ладони
Основные шаги
Выделение пальцев
Определение точек поворотов пальцев
Обозначения
кончики: P1, P2, P3, P4
основания: O1,

Слайд 10Сравнение формы ладоней
Эталонная ладонь G1
Тестовая ладонь G2
Сравнение формы ладоней
Эталонная ладонь G1
Тестовая ладонь G2

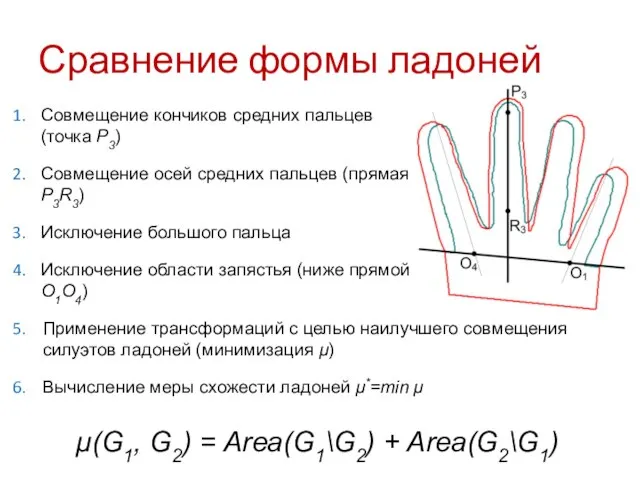
Слайд 11Сравнение формы ладоней
Совмещение кончиков средних пальцев (точка P3)
Совмещение осей средних пальцев (прямая
Сравнение формы ладоней
Совмещение кончиков средних пальцев (точка P3)
Совмещение осей средних пальцев (прямая
Слайд 12Подгонка
Площадь ладони в среднем – 40000 пикселей
Эталонная ладонь G1
Тестовая ладонь G2
Начальное совмещение
Наилучшее
Подгонка
Площадь ладони в среднем – 40000 пикселей
Эталонная ладонь G1
Тестовая ладонь G2
Начальное совмещение
Наилучшее

Слайд 13Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Слайд 14Выделение пальцев
Выделение пальцев
Слайд 15Точки поворотов пальцев
Предположение
Точка поворота пальца находится на оси пальца
Обозначения
=(len1, len2, len3,
Точки поворотов пальцев
Предположение
Точка поворота пальца находится на оси пальца
Обозначения
=(len1, len2, len3,
Слайд 16Подходы
1. Эвристический
li=1.3 leni
достаточно одного изображения ладони для идентификации модели
2. Оптимизационный
по множеству эталонных
Подходы
1. Эвристический
li=1.3 leni
достаточно одного изображения ладони для идентификации модели
2. Оптимизационный
по множеству эталонных
Слайд 17Оптимизационный подход
Дано
G1,…,Gn – множество эталонных изображений ладони одного человека, где Gi=Gi( )
μ*(G1,
Оптимизационный подход
Дано
G1,…,Gn – множество эталонных изображений ладони одного человека, где Gi=Gi( )
μ*(G1,
Слайд 18Оптимизационный подход
Решение
перебор: li∊[1.25 leni, 1.5 leni]
численные методы
…
Пример
l1 = 1.25 len1
l2 = 1.38
Оптимизационный подход
Решение
перебор: li∊[1.25 leni, 1.5 leni]
численные методы
…
Пример
l1 = 1.25 len1
l2 = 1.38
![Оптимизационный подход Решение перебор: li∊[1.25 leni, 1.5 leni] численные методы … Пример](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/368734/slide-17.jpg)
Слайд 19Пример
Эвристический подход
Оптимизационный подход: полный перебор
Оптимизационный подход: метод Нелдера-Мида
Пример
Эвристический подход
Оптимизационный подход: полный перебор
Оптимизационный подход: метод Нелдера-Мида

Слайд 20Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Слайд 21Исходные данные
База ладоней
22 человека
45 эталонных изображений
(2-3 для каждого человека)
52 тестовых изображения
(2-3 для
Исходные данные
База ладоней
22 человека
45 эталонных изображений
(2-3 для каждого человека)
52 тестовых изображения
(2-3 для
 Качество жизни и качество медицинской помощи по мнению населения геронтологической группы
Качество жизни и качество медицинской помощи по мнению населения геронтологической группы Использование интерактивных методов в обучении учащихся на уроках английского языка
Использование интерактивных методов в обучении учащихся на уроках английского языка Лекарства дома
Лекарства дома Обеспечение 10кВ на момент строительства и пусконаладки ЛСП и ПЖМ м/р им Грайфера на строительной площадке
Обеспечение 10кВ на момент строительства и пусконаладки ЛСП и ПЖМ м/р им Грайфера на строительной площадке Презентация на тему Мое педагогическое кредо
Презентация на тему Мое педагогическое кредо Презентация на тему Мировой экономический кризис 1929-1933
Презентация на тему Мировой экономический кризис 1929-1933  Строевой устав вооруженных сил Российской Федерации
Строевой устав вооруженных сил Российской Федерации Нормативно-правовая база, обеспечивающая взаимодействие вуза и участников кластера
Нормативно-правовая база, обеспечивающая взаимодействие вуза и участников кластера Презентация на тему Сравнение компаний Лаборатория Касперского и ESET
Презентация на тему Сравнение компаний Лаборатория Касперского и ESET Производственный цикл продукции. Повышение оборачиваемости оборотных средств
Производственный цикл продукции. Повышение оборачиваемости оборотных средств Антивирусы TrustPort
Антивирусы TrustPort Резюме ФИО: Иванова Дарья Абрамовна Дата рождения:10 января, 1927 Место рождения: д. Челкума
Резюме ФИО: Иванова Дарья Абрамовна Дата рождения:10 января, 1927 Место рождения: д. Челкума Clases de español
Clases de español Менеджер по туризму
Менеджер по туризму Rixton. Расчет бонусов
Rixton. Расчет бонусов Презентация на тему Parks and gardens of London (Сады и парки Лондона)
Презентация на тему Parks and gardens of London (Сады и парки Лондона) РЕАЛИЗАЦИЯ ОРТОПЕДИЧЕСКИХ ИЗДЕЛИЙ В ПРЕМИАЛЬНОМ СЕГМЕНТЕ РЫНКА. - презентация
РЕАЛИЗАЦИЯ ОРТОПЕДИЧЕСКИХ ИЗДЕЛИЙ В ПРЕМИАЛЬНОМ СЕГМЕНТЕ РЫНКА. - презентация С++ Ввод и вывод
С++ Ввод и вывод  Красная книга -сигнал тревоги
Красная книга -сигнал тревоги Причины Второй мировой войны
Причины Второй мировой войны Организационное обеспечение единого государственного экзамена в Кировской области в 2012 годуМаренина Г.Л.,начальник отдела ито
Организационное обеспечение единого государственного экзамена в Кировской области в 2012 годуМаренина Г.Л.,начальник отдела ито Порядок рассмотрения претензий декоративного покрытия панелей
Порядок рассмотрения претензий декоративного покрытия панелей Презентация на тему Кровь–носительница жизни
Презентация на тему Кровь–носительница жизни  Татарская кухня. Технология и отпуск блюда «Азу по–татарски»
Татарская кухня. Технология и отпуск блюда «Азу по–татарски» Языки кодирования
Языки кодирования Анкеты Questionnaires Forward 8
Анкеты Questionnaires Forward 8 Порядок проведения валютных операций в Республике Казахстан
Порядок проведения валютных операций в Республике Казахстан МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИнеправительственным организациямпо проведению первичной инвентаризации устаревших и запрещенных к и
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИнеправительственным организациямпо проведению первичной инвентаризации устаревших и запрещенных к и