- Плоская система произвольно расположенных сил

Содержание
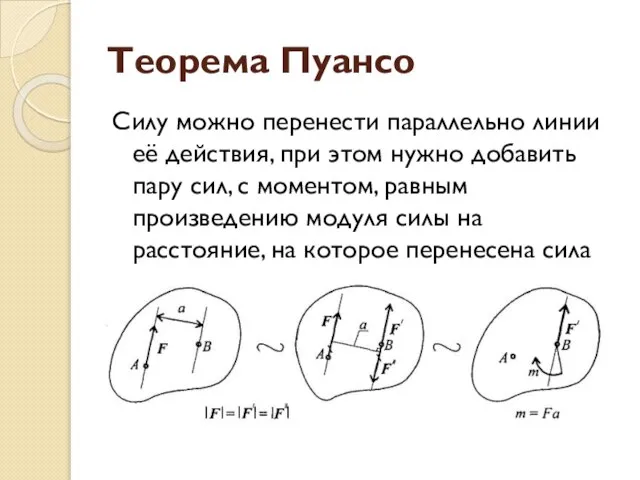
- 2. Теорема Пуансо Силу можно перенести параллельно линии её действия, при этом нужно добавить пару сил, с
- 3. Луи Пуансо 1777 − 1859 Французский математик и механик Академик Парижской Академии наук Ввёл понятие реакции
- 4. Произвольная плоская система сил ⇒ Силы не пересекаются в одной точке ⇒ Упрощаем, перенеся все силы
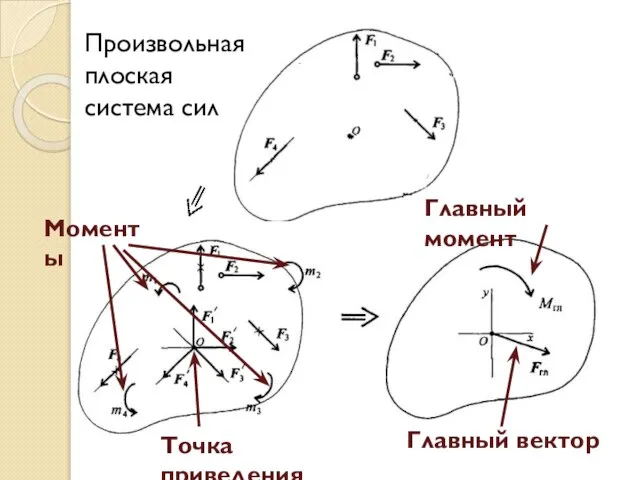
- 5. Произвольная плоская система сил Точка приведения Моменты Главный вектор Главный момент
- 6. Главный вектор системы Геометрическая сумма векторов Для проекций Модуль главного вектора
- 7. Главный момент системы Алгебраическая сумма моментов сил системы относительно точки приведения
- 8. Условие равновесия Для равновесия плоской системы произвольно расположенных сил необходимо и достаточно, чтобы векторная сумма всех
- 9. Основная форма уравнения равновесия
- 10. Уравнений моментов можно записать бесконечное множество Но на плоскости можно составить только 3 независимых уравнения моментов,
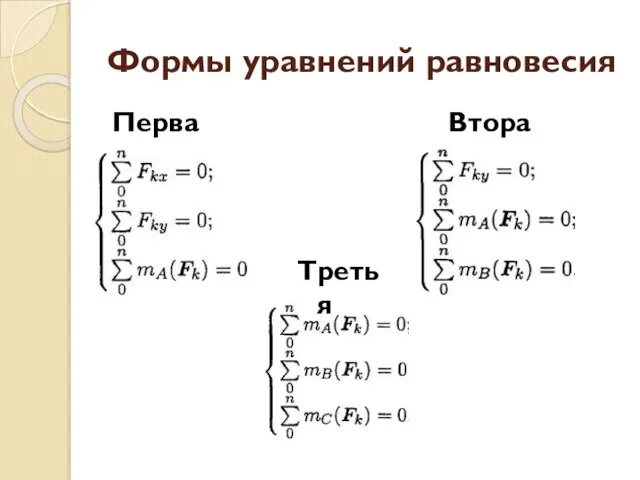
- 11. Формы уравнений равновесия Первая Вторая Третья
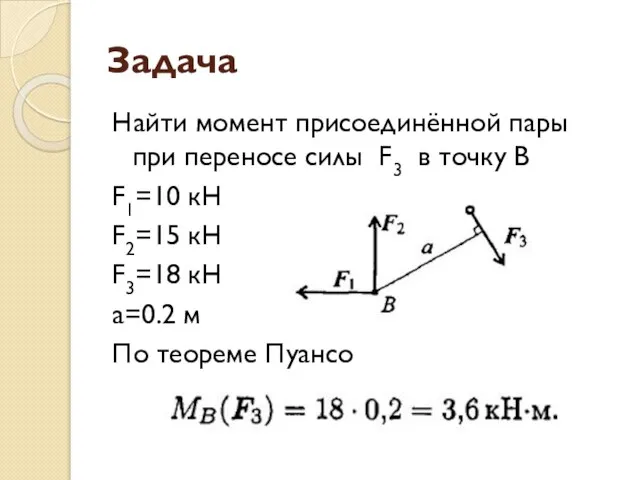
- 12. Задача Найти момент присоединённой пары при переносе силы F3 в точку В F1=10 кН F2=15 кН
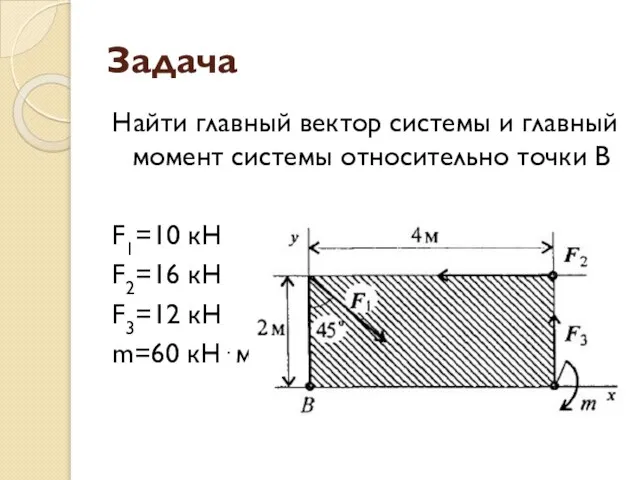
- 13. Задача Найти главный вектор системы и главный момент системы относительно точки В F1=10 кН F2=16 кН
- 14. Решение
- 16. Скачать презентацию
Слайд 3Луи Пуансо
1777 − 1859
Французский математик и механик
Академик Парижской Академии наук
Ввёл понятие реакции
Луи Пуансо
1777 − 1859
Французский математик и механик
Академик Парижской Академии наук
Ввёл понятие реакции
Слайд 4Произвольная плоская система сил ⇒
Силы не пересекаются в одной точке ⇒
Упрощаем, перенеся
Произвольная плоская система сил ⇒
Силы не пересекаются в одной точке ⇒
Упрощаем, перенеся
Слайд 5Произвольная плоская система сил
Точка приведения
Моменты
Главный вектор
Главный момент
Произвольная плоская система сил
Точка приведения
Моменты
Главный вектор
Главный момент
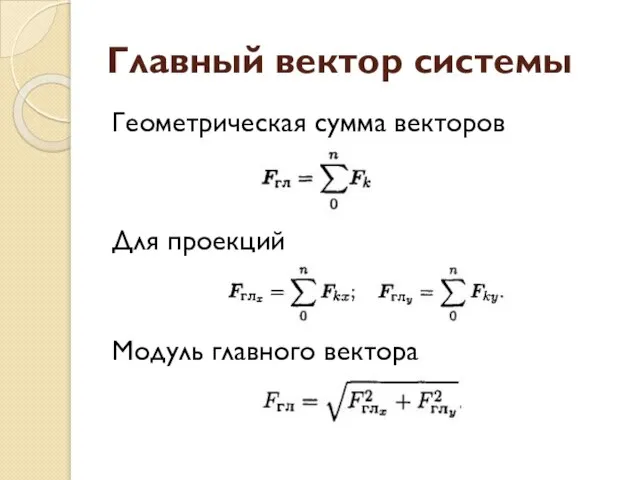
Слайд 6Главный вектор системы
Геометрическая сумма векторов
Для проекций
Модуль главного вектора
Главный вектор системы
Геометрическая сумма векторов
Для проекций
Модуль главного вектора
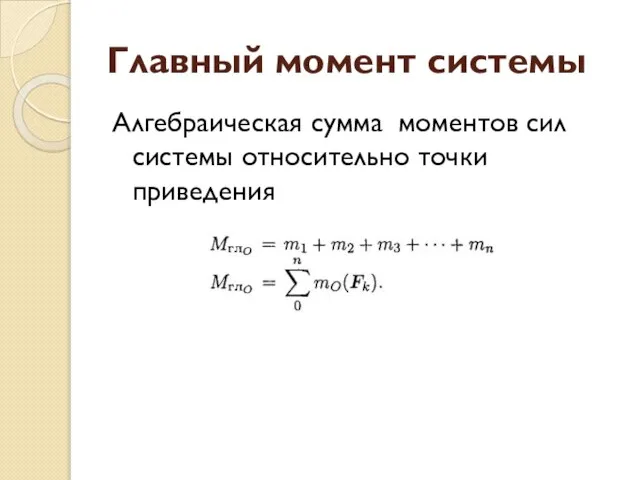
Слайд 7Главный момент системы
Алгебраическая сумма моментов сил системы относительно точки приведения
Главный момент системы
Алгебраическая сумма моментов сил системы относительно точки приведения
Слайд 8Условие равновесия
Для равновесия плоской системы произвольно расположенных сил необходимо и достаточно,
Условие равновесия
Для равновесия плоской системы произвольно расположенных сил необходимо и достаточно,
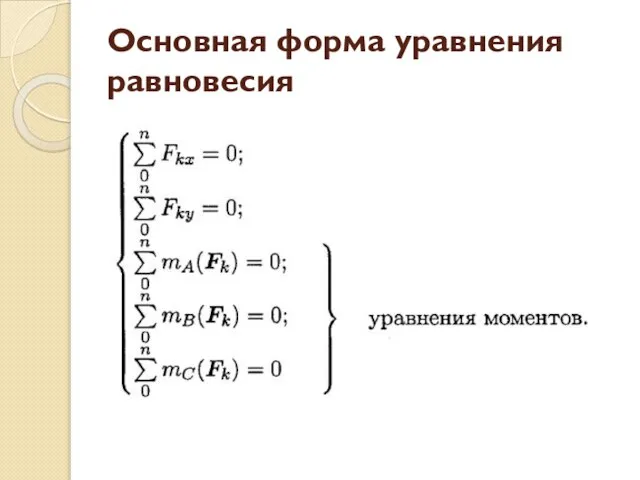
Слайд 9Основная форма уравнения равновесия
Основная форма уравнения равновесия
Слайд 10Уравнений моментов можно записать бесконечное множество
Но на плоскости можно составить только 3
Уравнений моментов можно записать бесконечное множество
Но на плоскости можно составить только 3
Слайд 11Формы уравнений равновесия
Первая
Вторая
Третья
Формы уравнений равновесия
Первая
Вторая
Третья
Слайд 12Задача
Найти момент присоединённой пары при переносе силы F3 в точку В
F1=10 кН
F2=15
Задача
Найти момент присоединённой пары при переносе силы F3 в точку В
F1=10 кН
F2=15
Слайд 13Задача
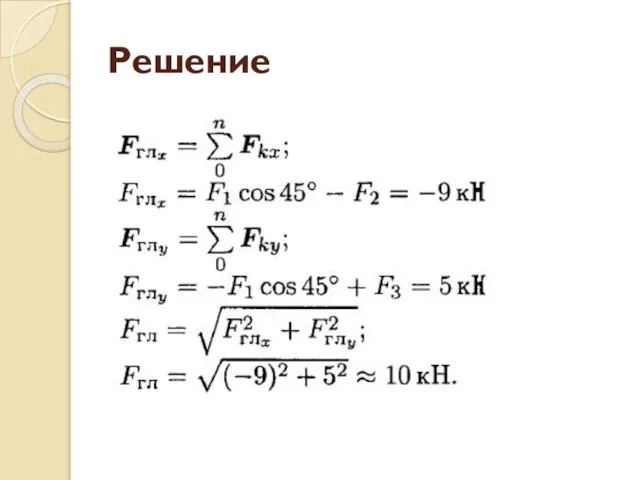
Найти главный вектор системы и главный момент системы относительно точки В
F1=10 кН
F2=16
Задача
Найти главный вектор системы и главный момент системы относительно точки В
F1=10 кН
F2=16
Слайд 14Решение
Решение
 Государственное пенсионное страхование: источники финансирования, субъекты, виды и размеры выплат, органы управления
Государственное пенсионное страхование: источники финансирования, субъекты, виды и размеры выплат, органы управления Формирование эмоционального настроя
Формирование эмоционального настроя Презентация по обществознанию на тему _Правовое государство_ (9 класс)
Презентация по обществознанию на тему _Правовое государство_ (9 класс) Презентация на тему: Педагогическая рефлексия как основа профессионального и личностного роста педагога
Презентация на тему: Педагогическая рефлексия как основа профессионального и личностного роста педагога Презентация на тему Toys
Презентация на тему Toys Как гармонично совместить общественную работу и семью
Как гармонично совместить общественную работу и семью Логические основы ЭВМ
Логические основы ЭВМ Иван Сергеевич Тургенев«Бежин луг».
Иван Сергеевич Тургенев«Бежин луг». Гражданское право
Гражданское право Санкт-Петербургский государственный экономический университет. Направление Международный бизнес
Санкт-Петербургский государственный экономический университет. Направление Международный бизнес Менеджмент качества
Менеджмент качества Пудель
Пудель ATP. Лекция 4. Spanning Tree
ATP. Лекция 4. Spanning Tree Российский союз промышленников и предпринимателей Развитие пенсионных систем в в Российской Федерации (Сочи, 2 - 4 октября 2006 г.) Н
Российский союз промышленников и предпринимателей Развитие пенсионных систем в в Российской Федерации (Сочи, 2 - 4 октября 2006 г.) Н Marketing research process
Marketing research process Словообразование имен прилагательных с помощью суффиксов
Словообразование имен прилагательных с помощью суффиксов История брюк
История брюк Общее знакомство с растениями
Общее знакомство с растениями Marketing tricks
Marketing tricks Вступая в ряды учеников средней школы, торжественно клянусь: 1. У доски стоять как лучший вратарь, не пропуская ни одного вопроса. 2.
Вступая в ряды учеников средней школы, торжественно клянусь: 1. У доски стоять как лучший вратарь, не пропуская ни одного вопроса. 2.  The big bang theory
The big bang theory Особливості ментальності базових ТІМ Представники ІV-ї квадри
Особливості ментальності базових ТІМ Представники ІV-ї квадри Последние годы жизни императора. Личность Петра 1
Последние годы жизни императора. Личность Петра 1 МЕЖДУНАРОДНЫЙ МОЛОДЕЖНЫЙИННОВАЦИОННЫЙ ФОРУМ В СИБИРИ«ИНТЕРРА’10»
МЕЖДУНАРОДНЫЙ МОЛОДЕЖНЫЙИННОВАЦИОННЫЙ ФОРУМ В СИБИРИ«ИНТЕРРА’10» Реализм в романе
Реализм в романе  ЗАЩИТА ПРАВ ПАЦИЕНТОВ
ЗАЩИТА ПРАВ ПАЦИЕНТОВ Фасад здания
Фасад здания Презентация на тему Буква Э (1 класс)
Презентация на тему Буква Э (1 класс)