- Понятие о решетчатой функции и её разности

Содержание
- 2. Для удобства исследования дискретных систем часто вводят для рассмотрения новую переменную – так называемое относительное время:
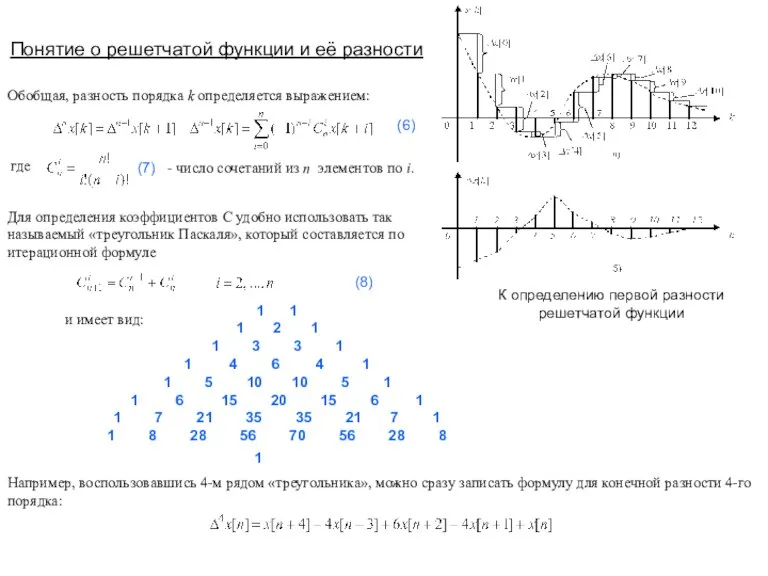
- 3. Понятие о решетчатой функции и её разности К определению первой разности решетчатой функции 1 1 1
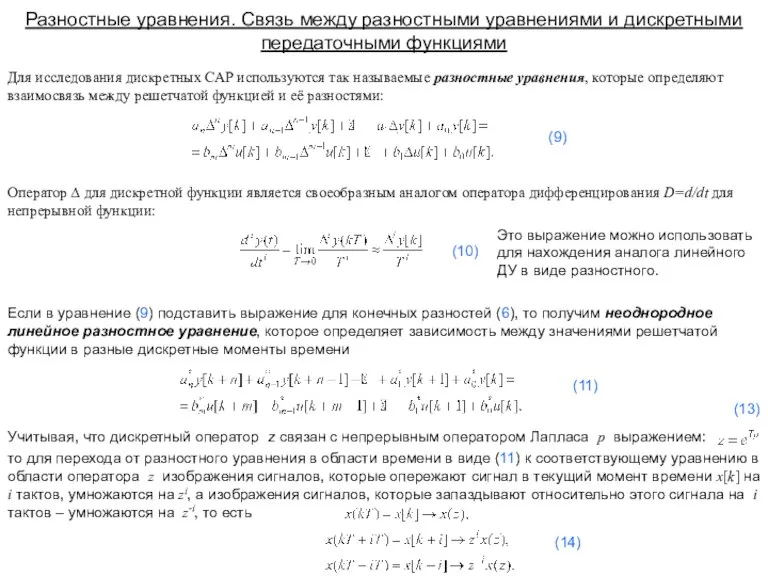
- 4. Разностные уравнения. Связь между разностными уравнениями и дискретными передаточными функциями Для исследования дискретных САР используются так
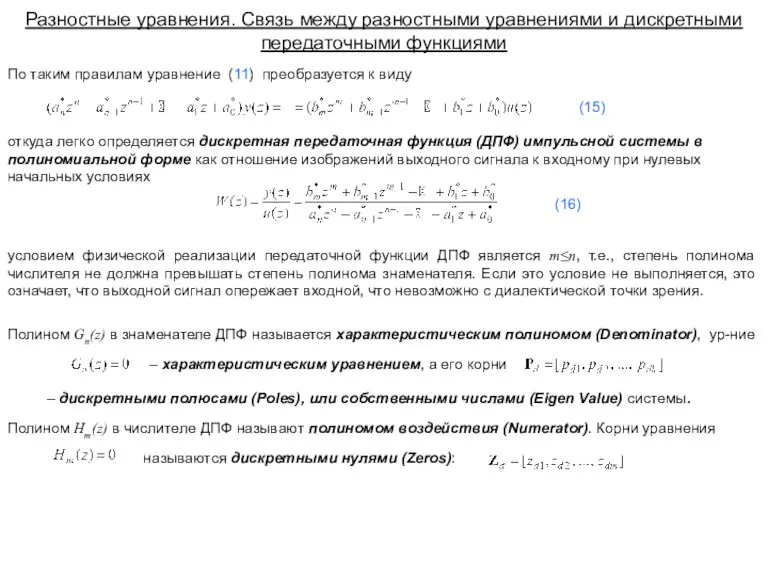
- 5. По таким правилам уравнение (11) преобразуется к виду откуда легко определяется дискретная передаточная функция (ДПФ) импульсной
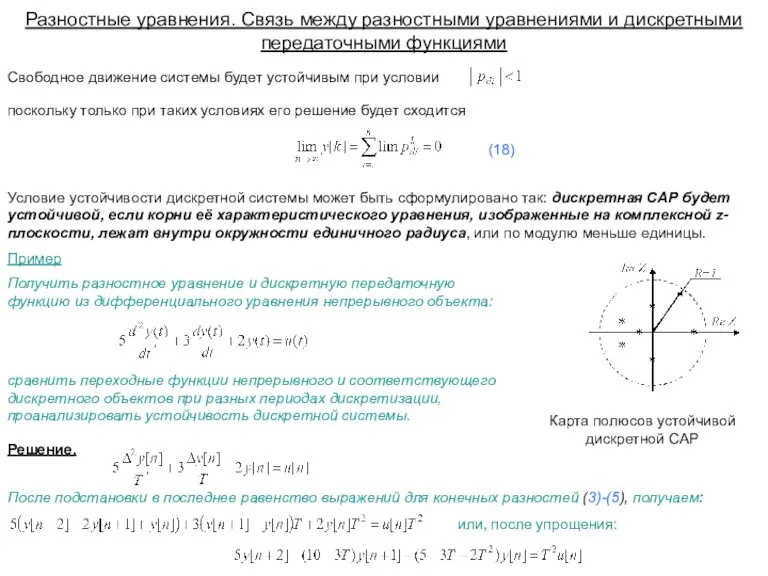
- 6. Условие устойчивости дискретной системы может быть сформулировано так: дискретная САР будет устойчивой, если корни её характеристического
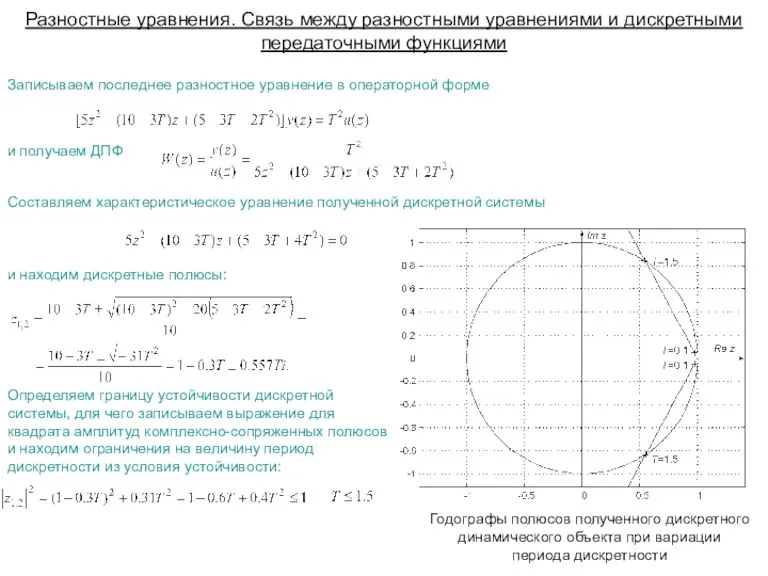
- 7. Записываем последнее разностное уравнение в операторной форме и получаем ДПФ Составляем характеристическое уравнение полученной дискретной системы
- 8. sa=tf(1,[5 3 2]) step(sa), grid on, hold on for T=[0.25 1] sd=tf(T^2,[5 -10+3*T 5-3*T+2*T^2],T) step(sd) end
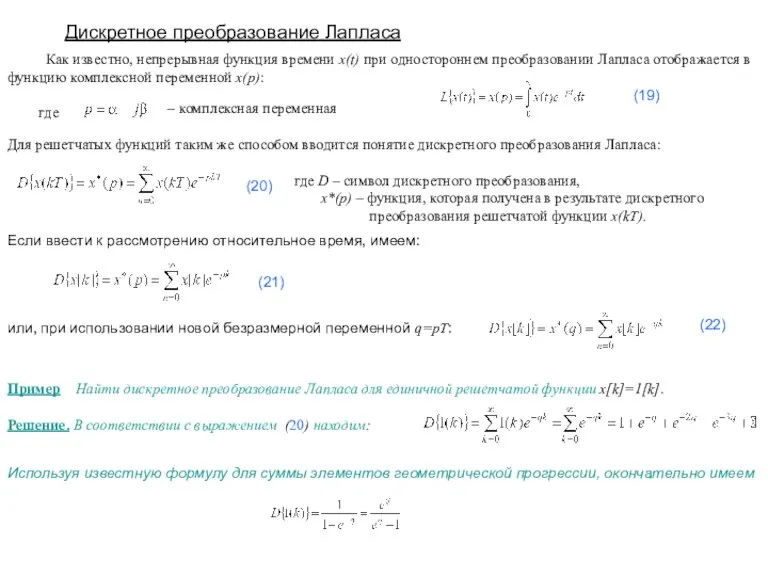
- 9. Дискретное преобразование Лапласа Как известно, непрерывная функция времени x(t) при одностороннем преобразовании Лапласа отображается в функцию
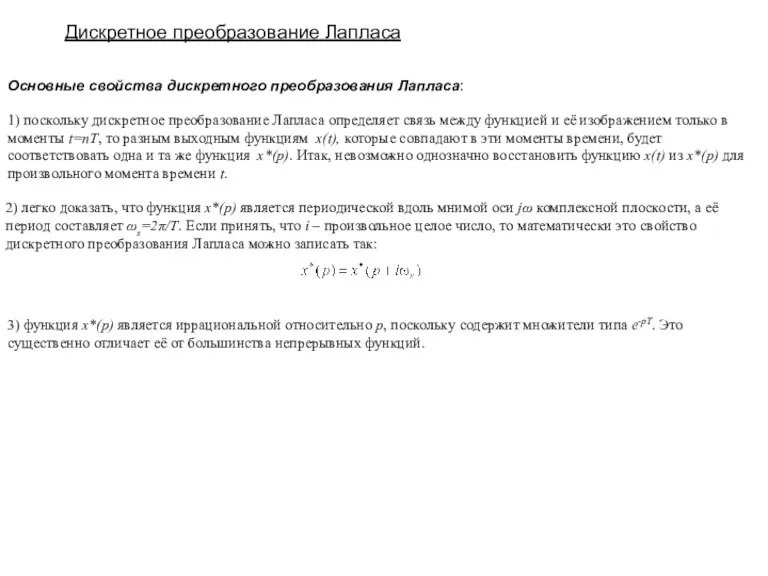
- 10. Основные свойства дискретного преобразования Лапласа: Дискретное преобразование Лапласа 1) поскольку дискретное преобразование Лапласа определяет связь между
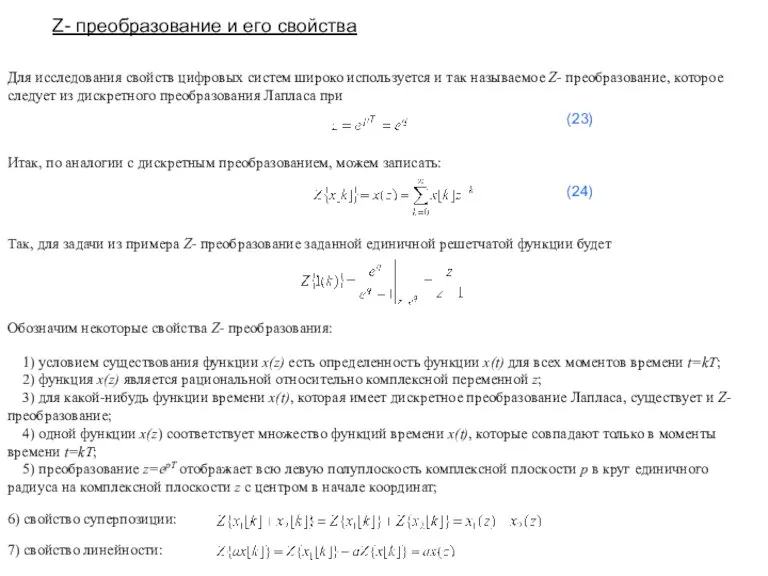
- 11. Z- преобразование и его свойства Для исследования свойств цифровых систем широко используется и так называемое Z-
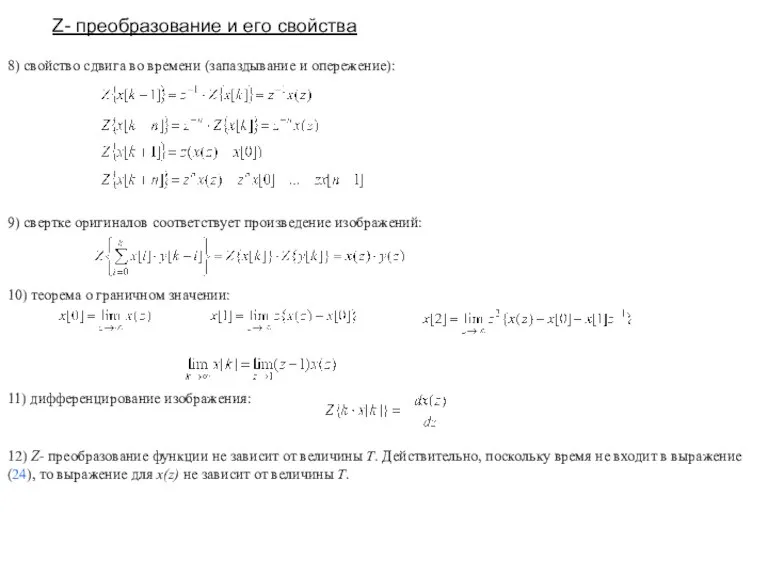
- 12. 8) свойство сдвига во времени (запаздывание и опережение): Z- преобразование и его свойства 9) свертке оригиналов
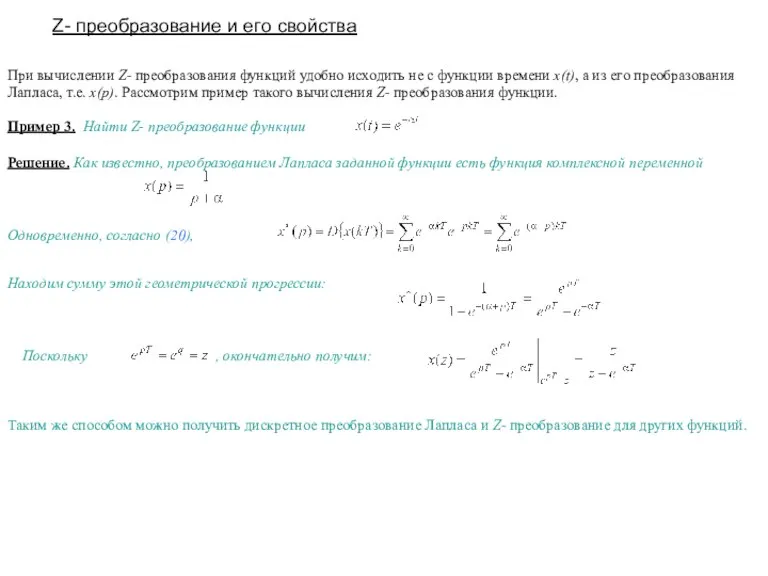
- 13. При вычислении Z- преобразования функций удобно исходить не с функции времени x(t), а из его преобразования
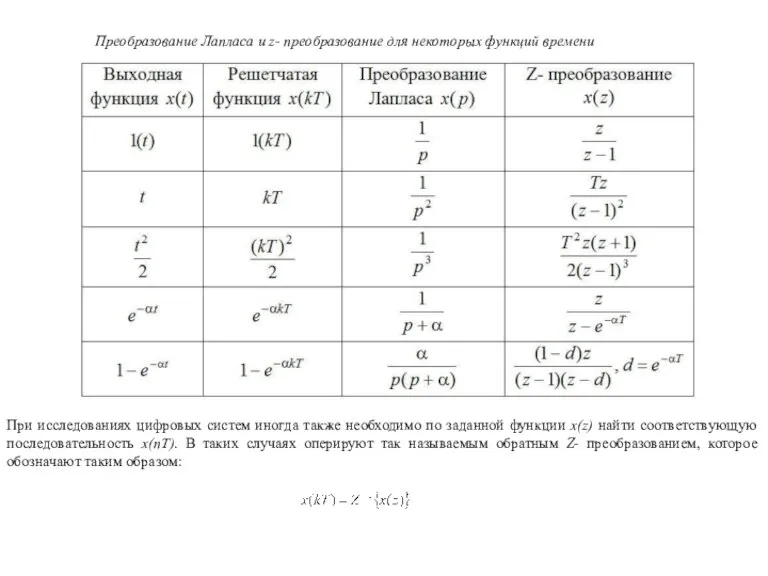
- 14. Преобразование Лапласа и z- преобразование для некоторых функций времени При исследованиях цифровых систем иногда также необходимо
- 15. Как вычислять z-преобразование Matlab syms k x = 1 + 2^(k+1); X = ztrans ( x
- 16. Обратное z-преобразование (численно) Matlab n = [3 -4 0]; d = [1 -3 2]; T =
- 18. Скачать презентацию
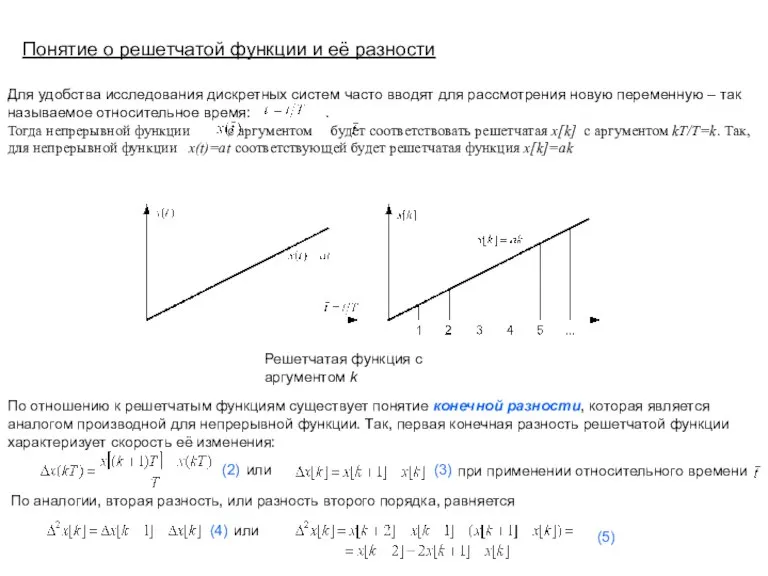
Слайд 3Понятие о решетчатой функции и её разности
К определению первой разности
решетчатой функции
Понятие о решетчатой функции и её разности
К определению первой разности
решетчатой функции
Слайд 4Разностные уравнения. Связь между разностными уравнениями и дискретными передаточными функциями
Для исследования
Разностные уравнения. Связь между разностными уравнениями и дискретными передаточными функциями
Для исследования
Слайд 5По таким правилам уравнение (11) преобразуется к виду
откуда легко определяется дискретная передаточная
По таким правилам уравнение (11) преобразуется к виду
откуда легко определяется дискретная передаточная
Слайд 6Условие устойчивости дискретной системы может быть сформулировано так: дискретная САР будет устойчивой,
Условие устойчивости дискретной системы может быть сформулировано так: дискретная САР будет устойчивой,
Слайд 7Записываем последнее разностное уравнение в операторной форме
и получаем ДПФ
Составляем характеристическое
Записываем последнее разностное уравнение в операторной форме
и получаем ДПФ
Составляем характеристическое
Слайд 8sa=tf(1,[5 3 2])
step(sa), grid on, hold on
for T=[0.25 1]
sd=tf(T^2,[5 -10+3*T 5-3*T+2*T^2],T)
sa=tf(1,[5 3 2])
step(sa), grid on, hold on
for T=[0.25 1]
sd=tf(T^2,[5 -10+3*T 5-3*T+2*T^2],T)
![sa=tf(1,[5 3 2]) step(sa), grid on, hold on for T=[0.25 1] sd=tf(T^2,[5](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1147846/slide-7.jpg)
Слайд 9Дискретное преобразование Лапласа
Как известно, непрерывная функция времени x(t) при одностороннем преобразовании
Дискретное преобразование Лапласа
Как известно, непрерывная функция времени x(t) при одностороннем преобразовании
Слайд 10Основные свойства дискретного преобразования Лапласа:
Дискретное преобразование Лапласа
1) поскольку дискретное преобразование
Основные свойства дискретного преобразования Лапласа:
Дискретное преобразование Лапласа
1) поскольку дискретное преобразование
Слайд 11Z- преобразование и его свойства
Для исследования свойств цифровых систем широко используется
Z- преобразование и его свойства
Для исследования свойств цифровых систем широко используется
Слайд 128) свойство сдвига во времени (запаздывание и опережение):
Z- преобразование и его
8) свойство сдвига во времени (запаздывание и опережение):
Z- преобразование и его
Слайд 13При вычислении Z- преобразования функций удобно исходить не с функции времени x(t),
При вычислении Z- преобразования функций удобно исходить не с функции времени x(t),
Слайд 14Преобразование Лапласа и z- преобразование для некоторых функций времени
При исследованиях цифровых
Преобразование Лапласа и z- преобразование для некоторых функций времени
При исследованиях цифровых
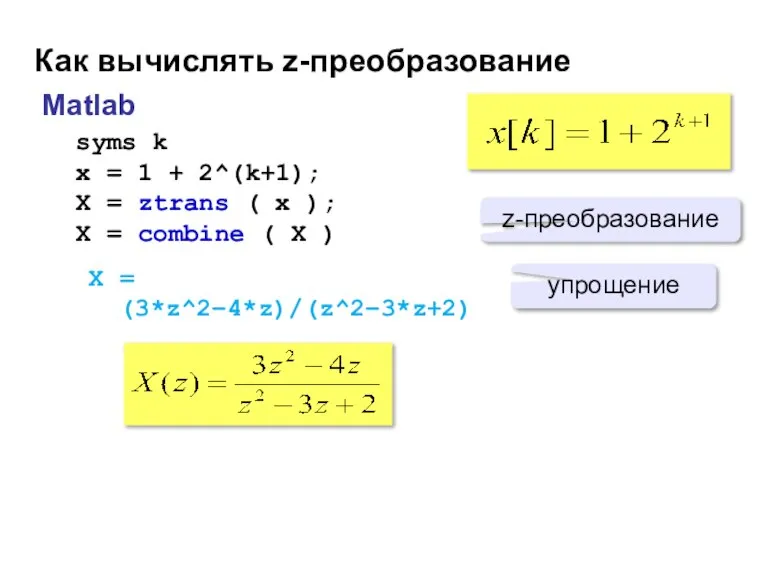
Слайд 15Как вычислять z-преобразование
Matlab
syms k
x = 1 + 2^(k+1);
X = ztrans ( x
Как вычислять z-преобразование
Matlab
syms k
x = 1 + 2^(k+1);
X = ztrans ( x
Слайд 16Обратное z-преобразование (численно)
Matlab
n = [3 -4 0];
d = [1 -3 2];
T =
Обратное z-преобразование (численно)
Matlab
n = [3 -4 0];
d = [1 -3 2];
T =
![Обратное z-преобразование (численно) Matlab n = [3 -4 0]; d = [1](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1147846/slide-15.jpg)
 Презентация на тему Типы текста (4 класс)
Презентация на тему Типы текста (4 класс) 5-я ежегодная благотворительная программа «Перекрёсток»-школам!» 2009
5-я ежегодная благотворительная программа «Перекрёсток»-школам!» 2009 Сергий Радонежский
Сергий Радонежский Новый вид искусства. Фотокосплей
Новый вид искусства. Фотокосплей Чудеса света
Чудеса света Презентация на тему Первое знакомство с вероятностью
Презентация на тему Первое знакомство с вероятностью НДР Ефективність розвитку виноградарства
НДР Ефективність розвитку виноградарства Юридические проблемы при проведении подрядных торгов
Юридические проблемы при проведении подрядных торгов День защитника Отечества
День защитника Отечества Paraisten Elite Соревнования проводятся с 18-19. Сентябрья 2010
Paraisten Elite Соревнования проводятся с 18-19. Сентябрья 2010 Презентация на тему Аргентина
Презентация на тему Аргентина  Инструкция эксперта
Инструкция эксперта Кейс Страховой случай
Кейс Страховой случай Retell. Превращаем статьи в подкасты
Retell. Превращаем статьи в подкасты Правовое положение и полномочия палат
Правовое положение и полномочия палат Урок 28Урок 28Урок 28Урок 28 ЯРГ2007-2008Кохтла-ЯрвеЭстония. - презентация
Урок 28Урок 28Урок 28Урок 28 ЯРГ2007-2008Кохтла-ЯрвеЭстония. - презентация АО Порт Самара
АО Порт Самара Диагностика результатов труда учителя как показатель его профессиональных достижений
Диагностика результатов труда учителя как показатель его профессиональных достижений Презентация на тему Условные знаки
Презентация на тему Условные знаки London zoo
London zoo Здравствуй, школа
Здравствуй, школа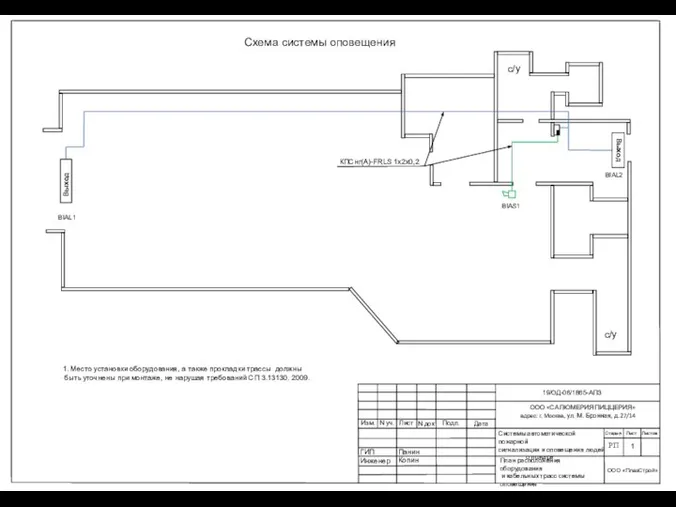 Схема системы оповещения
Схема системы оповещения Объект долевого строительства на территории города Азова, где возможно появление обманутых дольщиков
Объект долевого строительства на территории города Азова, где возможно появление обманутых дольщиков Бескаркаская мебель
Бескаркаская мебель Географические названия Великобритании
Географические названия Великобритании «Подготовка отчета некоммерческой организацией» Ведущие семинара: Совейко Алена Николаевна - специалист отдела по делам некомме
«Подготовка отчета некоммерческой организацией» Ведущие семинара: Совейко Алена Николаевна - специалист отдела по делам некомме Создание проекта. Шаблон
Создание проекта. Шаблон Общее собрание трудового коллектива 12.03.2019 г
Общее собрание трудового коллектива 12.03.2019 г