Постановка задачи Найти путь от точки А к точке Б значит найти последовательность действий проделав которые можно переместиться
- Постановка задачи Найти путь от точки А к точке Б значит найти последовательность действий проделав которые можно переместиться

Содержание
- 2. Виды карт Карта дискретна. Нужно найти путь на графе Карта непрерывна. Нужно найти векторную функцию Комбинация
- 3. Поиск пути на графе Найти путь значит найти последовательность рёбер, от исходной вершины к искомой Классические
- 4. А* Общие сведения Впервые упомянут в 1968 году Питером Хартом Нильсом Нильсоном и Бертраном Рафаэлем. Является
- 5. А* Описание алгоритма Алгоритм А* оперирует с двумя списками: открытым и закрытым. В открытый список помещаются
- 6. А* описание алгоритма 1) Добавляем стартовую клетку в открытый список. 2) Повторяем следующее: a) Ищем в
- 7. Проблемы А* Сглаживание пути Рост потребляемой памяти Одновременный поиск
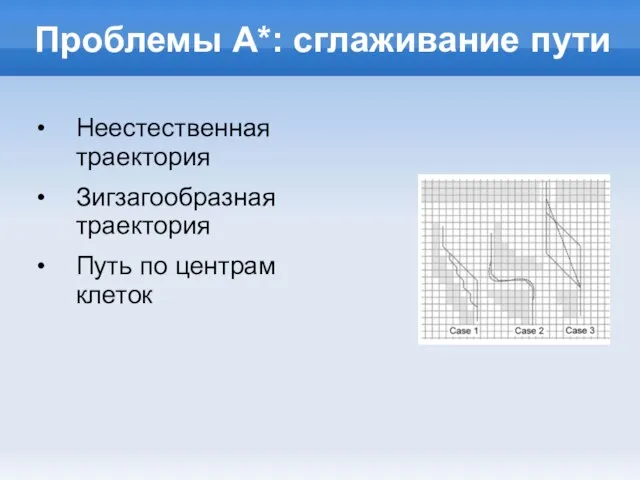
- 8. Проблемы А*: сглаживание пути Неестественная траектория Зигзагообразная траектория Путь по центрам клеток
- 9. Проблемы А*: память и скорость Улучшаем алгоритм Улучшаем эвристику Укрупняем клетки(двупроходный алгоритм) Комбинируем с другими алгоритмами
- 10. Метод потенциальных полей Препятствия отталкивают, цель притягивает Основная проблема – локальные минимумы Локальные минимумы обходим итерациями
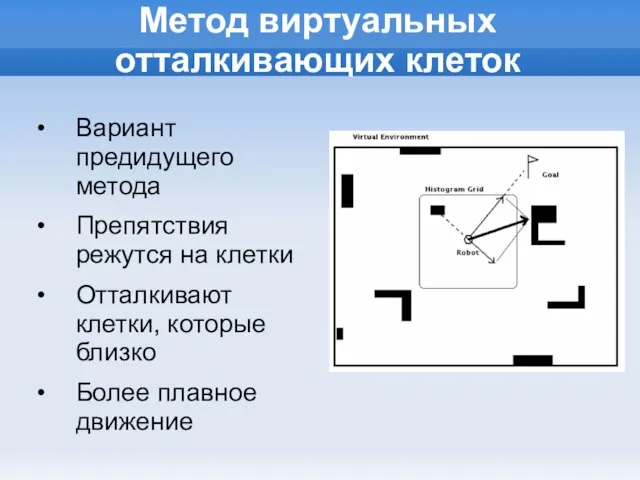
- 11. Метод виртуальных отталкивающих клеток Вариант предидущего метода Препятствия режутся на клетки Отталкивают клетки, которые близко Более
- 12. Комбинируем методы поиска Делим мир на локации От локации к локации – А* Внутри локации метод
- 13. Вопросы
- 15. Скачать презентацию
Слайд 3Поиск пути на графе
Найти путь значит найти последовательность рёбер, от исходной вершины
Поиск пути на графе
Найти путь значит найти последовательность рёбер, от исходной вершины
Слайд 4А* Общие сведения
Впервые упомянут в 1968 году Питером Хартом Нильсом Нильсоном и
А* Общие сведения
Впервые упомянут в 1968 году Питером Хартом Нильсом Нильсоном и
Слайд 5А* Описание алгоритма
Алгоритм А* оперирует с двумя списками: открытым и закрытым. В
А* Описание алгоритма
Алгоритм А* оперирует с двумя списками: открытым и закрытым. В
Слайд 6А* описание алгоритма
1) Добавляем стартовую клетку в открытый список.
2) Повторяем следующее:
a) Ищем
А* описание алгоритма
1) Добавляем стартовую клетку в открытый список.
2) Повторяем следующее:
a) Ищем

Слайд 7Проблемы А*
Сглаживание пути
Рост потребляемой памяти
Одновременный поиск
Проблемы А*
Сглаживание пути
Рост потребляемой памяти
Одновременный поиск
Слайд 8Проблемы А*: сглаживание пути
Неестественная траектория
Зигзагообразная траектория
Путь по центрам клеток
Проблемы А*: сглаживание пути
Неестественная траектория
Зигзагообразная траектория
Путь по центрам клеток
Слайд 9Проблемы А*: память и скорость
Улучшаем алгоритм
Улучшаем эвристику
Укрупняем клетки(двупроходный алгоритм)
Комбинируем с
Проблемы А*: память и скорость
Улучшаем алгоритм
Улучшаем эвристику
Укрупняем клетки(двупроходный алгоритм)
Комбинируем с
Слайд 10Метод потенциальных полей
Препятствия отталкивают, цель притягивает
Основная проблема – локальные минимумы
Локальные минимумы обходим
Метод потенциальных полей
Препятствия отталкивают, цель притягивает
Основная проблема – локальные минимумы
Локальные минимумы обходим
Слайд 11Метод виртуальных отталкивающих клеток
Вариант предидущего метода
Препятствия режутся на клетки
Отталкивают клетки, которые близко
Более
Метод виртуальных отталкивающих клеток
Вариант предидущего метода
Препятствия режутся на клетки
Отталкивают клетки, которые близко
Более
Слайд 12Комбинируем методы поиска
Делим мир на локации
От локации к локации – А*
Внутри локации
Комбинируем методы поиска
Делим мир на локации
От локации к локации – А*
Внутри локации
Слайд 13Вопросы
Вопросы
 Умные вещи в современном мире
Умные вещи в современном мире Фордизм
Фордизм Oil and Gas Opportunities in Alaska
Oil and Gas Opportunities in Alaska From " the Big Bang" to Homo Sapiens
From " the Big Bang" to Homo Sapiens Индустриальный пейзаж
Индустриальный пейзаж Вместе весело шагать по дорогам Знаний
Вместе весело шагать по дорогам Знаний Презентация на тему Средства индивидуальной защиты
Презентация на тему Средства индивидуальной защиты  Основные участники процесса взаимодействия в рамках исполнения Постановления 639-ПП
Основные участники процесса взаимодействия в рамках исполнения Постановления 639-ПП Вещества и материалы. Образование и получение веществ
Вещества и материалы. Образование и получение веществ Великие Русские Ученые
Великие Русские Ученые НАЦИОНАЛЬНЫЕ ПРАЗДНИКИ ЛИТВЫ
НАЦИОНАЛЬНЫЕ ПРАЗДНИКИ ЛИТВЫ  Борис АНДРИЕНКО Бизнес-консультант, тренер психолог Тренерская деятельность с 2005 года. Автор и ведущий более 10 тренингов, провел о
Борис АНДРИЕНКО Бизнес-консультант, тренер психолог Тренерская деятельность с 2005 года. Автор и ведущий более 10 тренингов, провел о Приёмы сжатия текста
Приёмы сжатия текста Центр НИТ МИРЭА-МГДД(Ю)
Центр НИТ МИРЭА-МГДД(Ю) Строение растительной клетки на примере клеток кожицы
Строение растительной клетки на примере клеток кожицы Собираем родственников
Собираем родственников ТЕМА № 3 (ХПИ)
ТЕМА № 3 (ХПИ) УЯ. Счета
УЯ. Счета Серьезные намерения. Готовность к браку и родительству
Серьезные намерения. Готовность к браку и родительству Правила выбора крема для рук
Правила выбора крема для рук Modern Philosophy
Modern Philosophy  Графическое изображение деталей из металла
Графическое изображение деталей из металла Санкт-Петербургский горный университет. Кафедра безопасности производств
Санкт-Петербургский горный университет. Кафедра безопасности производств К 65 -летию Победы
К 65 -летию Победы Развитие двухуровневого доступа к торгам на ЕТС: лимиты, порядок расчетов, особенности учета операций
Развитие двухуровневого доступа к торгам на ЕТС: лимиты, порядок расчетов, особенности учета операций Фактор фонда возмещения
Фактор фонда возмещения Ветеринарно-санитарная экспертиза. Учебная литература
Ветеринарно-санитарная экспертиза. Учебная литература Опросные методы в социальной работе
Опросные методы в социальной работе