Слайд 2Основные компоненты роботов
Способы контроля
Виды робототехники
Способы контроля
3 закона робототехники
Искусственный интеллект
Подходы к определению искусственного
интеллекта
Современный искусственный интеллект
Классификация искусственного интеллекта
Разработки и открытия в робототехнике и ИИ
Тяжелая промышленность и роль машиностроительного комплекса в экономике РФ
Межгосударственные научные проекты и открытия
Слайд 3Основные компоненты роботов
Двигатели: В настоящий момент большинство роботов используют электродвигатели, которые бывают
нескольких видов. Двигатели постоянного тока, знакомые многим людям, быстро вращаются, когда через них проходит электрический ток. Если ток пустить в другом направлении, двигатели будут вращаться в обратную сторону.
Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определенный градус под управлением контроллера. Это позволяет проще ими управлять, так как контроллеру точно известно, на сколько был сделан поворот, без применения датчиков. По этой причине они используются на многих роботах и станках с ЧПУ.
Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы совершенно отличается: крошечные пьезоэлектрические ножки, вибрирующие со скоростью более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе, а также применяются на некоторых роботах.
Слайд 4Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании
сжатым воздухом, мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными животным.
Электроактивные полимеры — это сорт пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Однако, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все неэффективны или непрочны.
Эластичные нанотрубки: Это многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет этому волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменен проводом из такого материала диаметром 8 мм. Такие компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.
Слайд 5
Робототе́хника (от робот и техника; англ. robotics) — прикладная наука, занимающаяся разработкой автоматизированных
технических систем (роботов). Термин введён писателем-фантастом Айзеком Азимовым в 1942 году.
Робототехника требует большого запаса знаний в области электроники, механики, программного обеспечения и многих других дисциплин.
Виды робототехники
строительная промышленная авиационная военная бытовая
Слайд 6Способы контроля
По типу управления роботехнические системы подразделяются на:
1. Биотехнические: - командные
(кнопочное и рычажное управление отдельными звеньями робота); - копирующие (повтор движения человека, возможна реализация обратной связи, передающей прилагаемое усилие, экзоскелеты); - полуавтоматические (управление одним командным органом, например, рукояткой всей кинематической схемой робота);
2. Автоматические: - программные (функционируют по заранее заданной программе, в основном предназначены для решения однообразных задач в неизменных условиях окружения); - адаптивные (решают типовые задачи, но адаптируются под условия функционирования); - интеллектуальные (наиболее развитые автоматические системы);
3. Интерактивные: - автоматизированные (возможно чередование автоматических и биотехнических режимов); - супервизорные (автоматические системы, в которых человек выполняет только целеуказательные функции); - диалоговые (робот участвует в диалоге с человеком по выбору стратегии поведения, при этом как правило робот оснащается экспертной системой, способной прогнозировать результаты манипуляций и дающей советы по выбору цели).
В развитии методов управления роботами огромное значение имеет развитие технической кибернетики и теории автоматического управления.
Слайд 73 закона робототехники
1)Робот не может причинить вред человеку или своим бездействием допустить,
чтобы человеку был причинён вред.
2)Робот должен повиноваться всем приказам, которые дает человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
3)Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам.
Работы в области искусственного интеллекта рассматривают Законы роботехники как идеал будущего: нужно быть действительно гением, чтобы найти способ применить их на практике. Да и в самой области искусственного интеллекта могут потребоваться серьёзные исследования, для того чтобы роботы поняли Законы. Однако, чем более сложными становятся роботы, тем больше высказывается заинтересованности в разработке руководящих принципов и мер безопасности для них.
Слайд 8Искусственный интеллект
Это наука и разработка интеллектуальных машин и систем,
особенно интеллектуальных компьютерных
программ,
направленных на то, чтобы понять человеческий интеллект.
При этом используемые методы не обязаны быть биологически правдоподобны.
Но проблема состоит в том, что неизвестно какие вычислительные процедуры мы хотим называть интеллектуальными. А так как мы понимаем только некоторые механизмы интеллекта, то под интеллектом в пределах этой науки мы понимаем только вычислительную часть способности достигнуть целей в мире
В информатике проблемы искусственного интеллекта рассматриваются с позиций проектирования экспертных систем и баз знаний. Под базами знаний понимается совокупность данных и правил вывода, допускающих логический вывод и осмысленную обработку информации. В целом исследования проблем искусственного интеллекта в информатике направлено на создание, развитие и эксплуатацию интеллектуальных информационных систем, включая вопросы подготовки пользователей и разработчиков таких систем
Слайд 9Подходы к определению искусственного интеллекта
логический агентно-ориентированный интуитивный
(логический подход к (согласно этому подходу,интеллект-
(этот полход пред-
созданию систем ИИ это вычислительная часть способно- полагает,что ИИ
направлен на создание сти достигать поставленных перед будет способен
экспертных систем с интеллектуальной машиной целей. Он проявлять челове
логическими моделями акцентирует внимание на тех методах ческое поведение
баз знаний с использова- и алгоритмах, которые помогут даже в нормаль-
нием языка предикатов) интеллектуальной машине выживать ных ситуациях)
в окружающей среде при выполнении
поставленной задачи)
Слайд 10Современный искусственный интеллект
В настоящий момент в создании искусственного интеллекта наблюдается интенсивное перемалывание
всех предметных областей, имеющих хоть какое-то отношение к ИИ, в базы знаний. Практически все подходы были опробованы, но к возникновению искусственного разума ни одна исследовательская группа так и не подошла.
Исследования ИИ влились в общий поток технологий сингулярности (видового скачка, экспотенциального развития человека), таких как информатика, экспертные системы, нанотехнология, молекулярная биоэлектроника, теоретическая биология, квантовая теория.
Результаты разработок в области ИИ вошли в высшее и среднее образование России в форме учебников информатики, где теперь изучаются вопросы работы и создания баз знаний, экспертных систем на базе персональных компьютеров на основе отечественных систем логического программирования, а также изучения фундаментальных вопросов математики и информатики на примерах работы с моделями баз знаний и экспертных систем в школах и вузах.
Слайд 11Классификация искусственного интеллекта

Слайд 12Интересные открытия и разработки в области робототехники и ИИ
1)Робот-учёный впервые совершил настоящее
открытие (британский робот сам строит предположения, задумывает эксперименты для их проверки и делает выводы)
2) Найден способ самосборки поврежденных или развалившихся на куски роботов
3)Разработан прототип экзоскелета, умножающий силу человека в 20 раз
4)Ведутся активные исследования по вопросу возможной эмоциональности роботов
5)Успешно завершились опыты британских ученых по самовоспроизводству роботов (робот сумел воссоздать точную копию себя ,а она , в свою очередь, стала изготавливать «внука» первого робота).
Слайд 13 структура промышленного комплекса РФ(2008 год)
роль машиностроительного комплекса в экономике РФ(2008 год)

Слайд 14Крупные межгосударственные научные проекты и открытия
1)Проект XFEL (X-Ray Free Electron Laser) станет
уникальным технологическим комплексом для проведения научных исследований на качественно новом уровне в таких приоритетных сферах развития отечественной инновационной экономики, как нанотехнологии и будет значительно превосходить по своим техническим параметрам аналогичные лазеры, которые уже строятся в США и Японии.
Рентгеновский лазер на свободных электронах XFEL длиной 3,4 км будет построен под землей в крупнейшем в Германии синхротронном центре DESY (г. Гамбург). Россия станет второй после Германии страной по объему инвестиций в международный проект, который позволит выйти на новый уровень в исследованиях в области физики, химии, материаловедения, наук о жизни, биомедицине.
Слайд 15Исследования в области фундаментальной физики привели к созданию сверхчувствительных наносенсоров
Британские исследователи совместно
с учеными из Бельгии и США разработали новые структуры чувствительных сенсоров, которые могут быть использованы, например, в системах обеспечения безопасности на транспорте для распознавания отравляющих и взрывчатых веществ. Другим, не менее важным, приложением подобных сенсоров может стать медицина, в частности, для определения протеина в крови пациентов с высокой чувствительностью и точностью.
Работу, которая финансируется Советом по Инженерным и Научным Исследованиям (Engineering and Physical Sciences Research Council), возглавили физики Лондонского Имперского Колледжа.
Слайд 16Чем дальше развивается наноэлектроника, тем больше технологических проблем появляется у инженеров. Одна
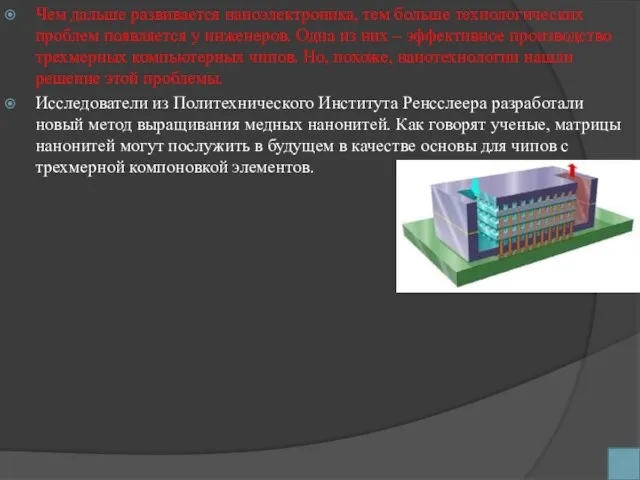
из них – эффективное производство трехмерных компьютерных чипов. Но, похоже, нанотехнологии нашли решение этой проблемы.
Исследователи из Политехнического Института Ренсслеера разработали новый метод выращивания медных нанонитей. Как говорят ученые, матрицы нанонитей могут послужить в будущем в качестве основы для чипов с трехмерной компоновкой элементов.
Слайд 17Британские ученые из Университета Ворвика научились замедлять испускание фотона путем воздействия на
экситоны – побочные продукты, остающихся при изготовлении квантовых точек.
Как сообщается в университетском пресс-релизе, который представляет собой краткое изложение статьи из журнала Physical Review Letters, в своей работе участники исследования замедляли свет, продлевая время жизни экситона – квазичастицы, возникающей при выбивании электрона фотоном с его энергетического уровня на более высокий и переходе электрона в возбужденное состояние. При этом электрон и образовавшаяся на его месте «дырка» оказываются связаны друг с другом посредством зарядовых взаимодействий. Когда электрон возвращается на прежний энергетический уровень, он занимает место «дырки», а выбивший его фотон испускается системой. Именно такое состояние частиц и называется экситоном. Исследователи считают, что у разработанной ими технологии большое будущее. Например, задержка испускания света может помочь в создании компьютеров, в которых фотоны используются для передачи информации.

 Поликультурное образование. Формирование идентичности обучающихся средствами курса ОРКСЭ
Поликультурное образование. Формирование идентичности обучающихся средствами курса ОРКСЭ Стратегический анализ транспортно-пересадочных узлов города Москвы
Стратегический анализ транспортно-пересадочных узлов города Москвы Вернуться из леса (2)
Вернуться из леса (2) Абсолютные и относительные величины
Абсолютные и относительные величины  Компьютерные презентации Мультимедийные технологии
Компьютерные презентации Мультимедийные технологии Mersedes-Vito
Mersedes-Vito Качество и уровень жизни. Бюджет прожиточного минимума. Потребительская корзина
Качество и уровень жизни. Бюджет прожиточного минимума. Потребительская корзина Техническое регулирование в строительстве. Системы стандартизации и добровольной оценки соответствия НОСТРОЙ.
Техническое регулирование в строительстве. Системы стандартизации и добровольной оценки соответствия НОСТРОЙ. Автоматика судовых энергетических установок и вспомогательных механизмов практика
Автоматика судовых энергетических установок и вспомогательных механизмов практика Классификация и оценка рисков
Классификация и оценка рисков Ранние половые связи подростков. Родительское собрание
Ранние половые связи подростков. Родительское собрание Как задавать домашнее задание?
Как задавать домашнее задание? Я0зык
Я0зык Собственные и нарицательные имена существительные
Собственные и нарицательные имена существительные Динамика точки
Динамика точки Модульный урок«Атомы химических элементов. Структура Периодической системы»
Модульный урок«Атомы химических элементов. Структура Периодической системы» B i l d e n d e K u n s t
B i l d e n d e K u n s t Орфографическая минутка
Орфографическая минутка Внутренние воды Южной Америки
Внутренние воды Южной Америки Презентация на тему Патриоты России (4 класс)
Презентация на тему Патриоты России (4 класс) Сказка о возвращенном времени. Кто они, герои картин В.И.Сурикова?
Сказка о возвращенном времени. Кто они, герои картин В.И.Сурикова? Реклама в мобильных приложениях. Коммерческое предложение для СМИ
Реклама в мобильных приложениях. Коммерческое предложение для СМИ Манипуляции в общении и переговорах Изобретательностью и умом побеждать лучше, чем сопротивлением
Манипуляции в общении и переговорах Изобретательностью и умом побеждать лучше, чем сопротивлением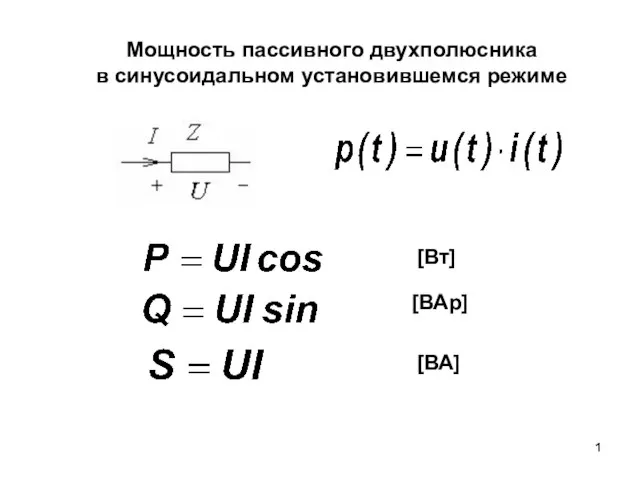 Мощность пассивного двухполюсника в синусоидальном установившемся режиме
Мощность пассивного двухполюсника в синусоидальном установившемся режиме Источники и институты классического средневекового права
Источники и институты классического средневекового права Солнечногорск
Солнечногорск Мы открыты для сотрудничества. АНО Начинающий фермер, Семейная животноводческая ферма
Мы открыты для сотрудничества. АНО Начинающий фермер, Семейная животноводческая ферма Pop-up формат. Временная розничная торговля
Pop-up формат. Временная розничная торговля