- Проблемы создания роботизированных машин переднего края ВС России

Содержание
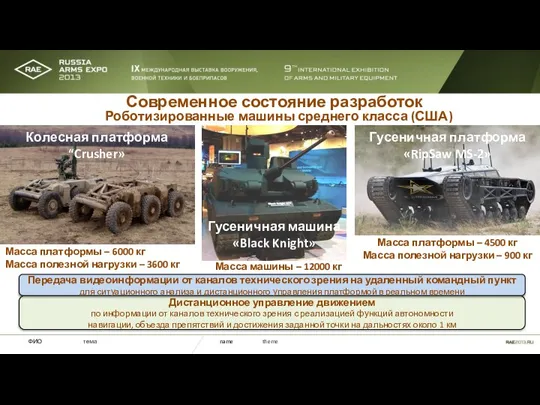
- 2. Современное состояние разработок Роботизированные машины среднего класса (США) Масса платформы – 6000 кг Масса полезной нагрузки
- 3. Роботизированная машина легкого класса (Россия) Комплекс разминирования «Клавир» Обеспечивается телеуправление роботизированной машиной со скоростью движения до
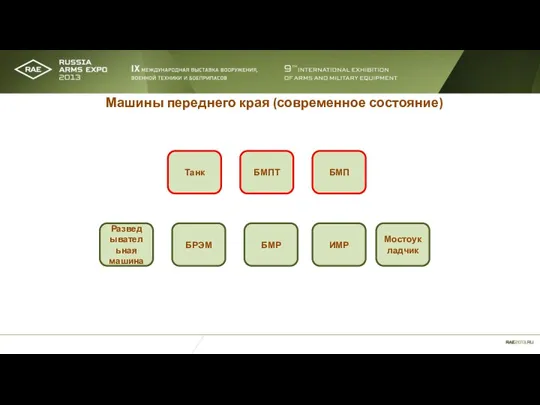
- 4. Машины переднего края (современное состояние) Танк БМПТ БМП Разведывательная машина БРЭМ БМР ИМР Мостоукладчик
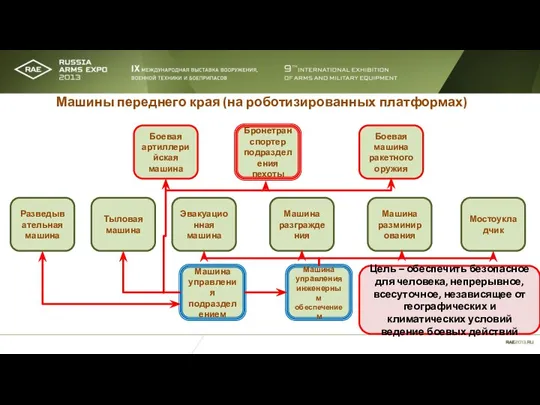
- 5. Бронетранспортер подразделения пехоты Тыловая машина Боевая артиллерийская машина Боевая машина ракетного оружия Эвакуационная машина Машина разграждения
- 6. theme FCS-MGV (экипажные машины по программе FCS) 2000…2009 2010…2021 Тенденция развития бронетанковой техники в США ICV
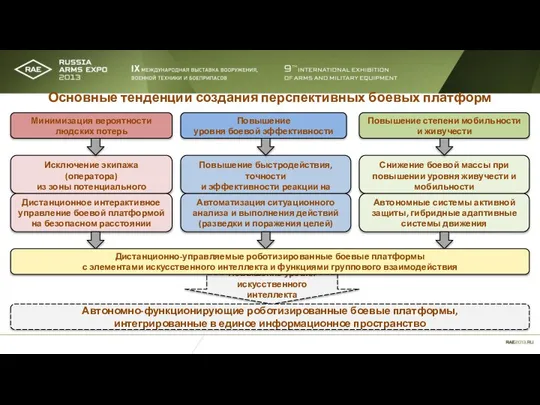
- 7. Повышение уровня боевой эффективности Минимизация вероятности людских потерь Повышение степени мобильности и живучести Повышение быстродействия, точности
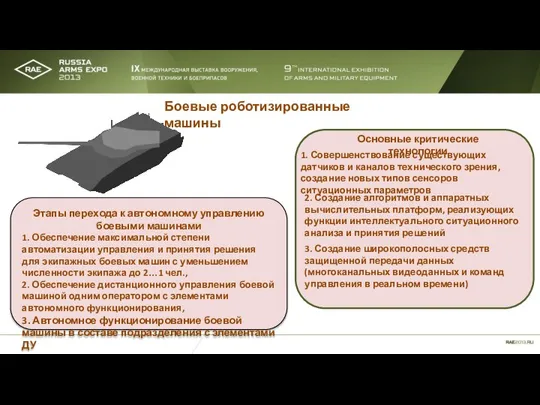
- 8. Этапы перехода к автономному управлению боевыми машинами 1. Обеспечение максимальной степени автоматизации управления и принятия решения
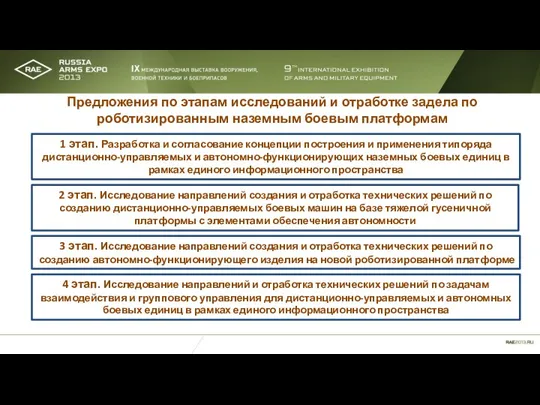
- 9. 1 этап. Разработка и согласование концепции построения и применения типоряда дистанционно-управляемых и автономно-функционирующих наземных боевых единиц
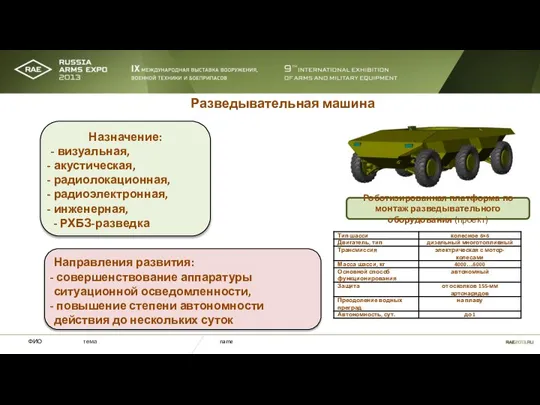
- 10. Разведывательная машина Роботизированная платформа по монтаж разведывательного оборудования (проект) Назначение: - визуальная, акустическая, радиолокационная, радиоэлектронная, инженерная,
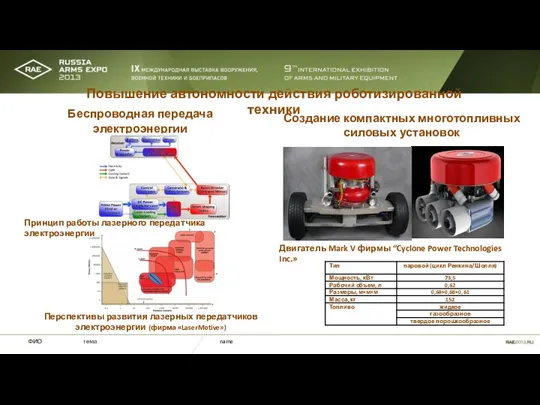
- 11. Повышение автономности действия роботизированной техники Беспроводная передача электроэнергии Создание компактных многотопливных силовых установок Двигатель Mark V
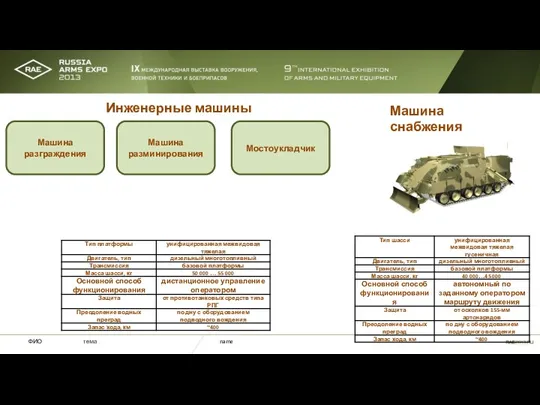
- 12. Инженерные машины Машина разграждения Машина разминирования Мостоукладчик Машина снабжения
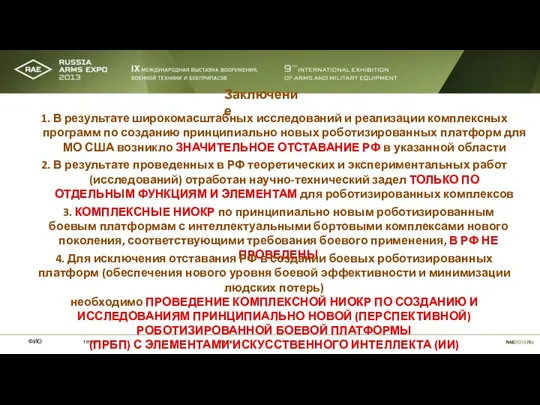
- 13. Заключение 1. В результате широкомасштабных исследований и реализации комплексных программ по созданию принципиально новых роботизированных платформ
- 15. Скачать презентацию
Слайд 2Современное состояние разработок
Роботизированные машины среднего класса (США)
Масса платформы – 6000 кг
Масса
Современное состояние разработок
Роботизированные машины среднего класса (США)
Масса платформы – 6000 кг
Масса
Слайд 3Роботизированная машина легкого класса (Россия)
Комплекс разминирования «Клавир»
Обеспечивается телеуправление роботизированной машиной со скоростью
Роботизированная машина легкого класса (Россия)
Комплекс разминирования «Клавир»
Обеспечивается телеуправление роботизированной машиной со скоростью

Слайд 4Машины переднего края (современное состояние)
Танк
БМПТ
БМП
Разведывательная машина
БРЭМ
БМР
ИМР
Мостоукладчик
Машины переднего края (современное состояние)
Танк
БМПТ
БМП
Разведывательная машина
БРЭМ
БМР
ИМР
Мостоукладчик
Слайд 5Бронетранспортер подразделения пехоты
Тыловая
машина
Боевая артиллерийская машина
Боевая машина ракетного оружия
Эвакуационная машина
Машина разграждения
Машина разминирования
Мостоукладчик
Машина
Бронетранспортер подразделения пехоты
Тыловая
машина
Боевая артиллерийская машина
Боевая машина ракетного оружия
Эвакуационная машина
Машина разграждения
Машина разминирования
Мостоукладчик
Машина
Слайд 6theme
FCS-MGV
(экипажные машины по программе FCS)
2000…2009
2010…2021
Тенденция развития бронетанковой техники в США
ICV (БТР)
RSV (развед.
theme
FCS-MGV
(экипажные машины по программе FCS)
2000…2009
2010…2021
Тенденция развития бронетанковой техники в США
ICV (БТР)
RSV (развед.

Слайд 7Повышение
уровня боевой эффективности
Минимизация вероятности
людских потерь
Повышение степени мобильности
и живучести
Повышение
Повышение
уровня боевой эффективности
Минимизация вероятности
людских потерь
Повышение степени мобильности
и живучести
Повышение
Слайд 8Этапы перехода к автономному управлению боевыми машинами
1. Обеспечение максимальной степени автоматизации управления
Этапы перехода к автономному управлению боевыми машинами
1. Обеспечение максимальной степени автоматизации управления
Слайд 91 этап. Разработка и согласование концепции построения и применения типоряда дистанционно-управляемых и
1 этап. Разработка и согласование концепции построения и применения типоряда дистанционно-управляемых и
Слайд 10Разведывательная машина
Роботизированная платформа по монтаж разведывательного оборудования (проект)
Назначение:
- визуальная,
акустическая,
Разведывательная машина
Роботизированная платформа по монтаж разведывательного оборудования (проект)
Назначение:
- визуальная,
акустическая,
Слайд 11Повышение автономности действия роботизированной техники
Беспроводная передача электроэнергии
Создание компактных многотопливных силовых установок
Двигатель
Повышение автономности действия роботизированной техники
Беспроводная передача электроэнергии
Создание компактных многотопливных силовых установок
Двигатель
Слайд 12Инженерные машины
Машина разграждения
Машина разминирования
Мостоукладчик
Машина снабжения
Инженерные машины
Машина разграждения
Машина разминирования
Мостоукладчик
Машина снабжения
Слайд 13Заключение
1. В результате широкомасштабных исследований и реализации комплексных программ по созданию принципиально
Заключение
1. В результате широкомасштабных исследований и реализации комплексных программ по созданию принципиально
 Презентация на тему Правомерное поведение, правонарушение, юридическая ответственность
Презентация на тему Правомерное поведение, правонарушение, юридическая ответственность  Комбикорневый завод Здоровая ферма
Комбикорневый завод Здоровая ферма Грумерная мечта. Dream.Groom
Грумерная мечта. Dream.Groom Каждый школьник должен знать, как проекты составлять !
Каждый школьник должен знать, как проекты составлять ! Осознав, что в математике нет ничего более скучного и утомительного, чем умножение, деление, извлечение квадратных и кубических ко
Осознав, что в математике нет ничего более скучного и утомительного, чем умножение, деление, извлечение квадратных и кубических ко Анна Андреевна Ахматова(1889-1966)
Анна Андреевна Ахматова(1889-1966) Статья 178 Уголовного кодекса РФ гласит
Статья 178 Уголовного кодекса РФ гласит Моё хобби кулинария
Моё хобби кулинария Основная образовательная программа (ООП)Менеджмент в кино и телевидениипрофиль – «Менеджмент организации»направление – «Мене
Основная образовательная программа (ООП)Менеджмент в кино и телевидениипрофиль – «Менеджмент организации»направление – «Мене Презентация на тему Музыка в моей жизни
Презентация на тему Музыка в моей жизни Лекарства дома
Лекарства дома ОСНОВЫ ЛОГИСТИКИ курс лекций
ОСНОВЫ ЛОГИСТИКИ курс лекций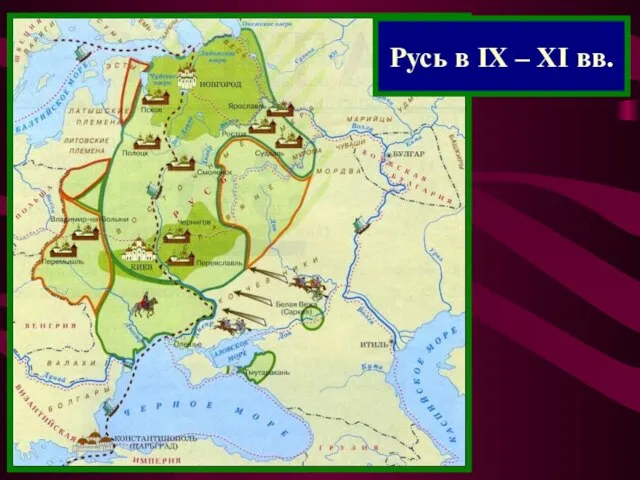 Русь в IX – XI вв
Русь в IX – XI вв Ангел Хранитель и святой, чьё имя мы носим
Ангел Хранитель и святой, чьё имя мы носим 1
1 Маркетинговая среда организации
Маркетинговая среда организации Лекция 3
Лекция 3 Ледоходы. Приспособление для ходьбы в гололёд, антискользители
Ледоходы. Приспособление для ходьбы в гололёд, антискользители Возведение завода по вторичной переработке пластиковых изделий на территории муниципального образования г. Новороссийска
Возведение завода по вторичной переработке пластиковых изделий на территории муниципального образования г. Новороссийска Тренинг Холодные звонки. HARD
Тренинг Холодные звонки. HARD Презентация на тему Логарифмы. Применение логарифмов
Презентация на тему Логарифмы. Применение логарифмов Презентация на тему Графики тригонометрических функций
Презентация на тему Графики тригонометрических функций Проблемы адаптации учебных мигрантов из Азии в российских университетах
Проблемы адаптации учебных мигрантов из Азии в российских университетах Мифы Древней Греции
Мифы Древней Греции Международный Университет природы, общества и человека
Международный Университет природы, общества и человека ВСЕ РАБОТЫ ХОРОШИ
ВСЕ РАБОТЫ ХОРОШИ Презентация на тему Личностный подход к лидерству
Презентация на тему Личностный подход к лидерству  шаблон презентации
шаблон презентации