- ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ КОМПЬЮТЕРНЫХ СИСТЕМ УПРАВЛЕНИЯ

Содержание
- 2. Объем дисциплины и виды учебной нагрузки. Дисциплина изучается в двух семестрах. 1 семестр. Лекции- 26 часов.
- 3. Литература 1. В.А. Бесекерский, Е. П. Попов. Теория систем автоматического регулирования. М. Из-во Наука. 1975 г.
- 4. Методические указания к изучению дисциплины ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ КОМПЬЮТЕРНЫХ СИСТЕМ УПРАВЛЕНИЯ Для успешного изучения данной дисциплины студенту
- 5. Весь курс предлагаемой дисциплины условно разбит на четыре раздела. Разработка непрерывной системы управления. Анализ непрерывной системы
- 6. Введение Быстрое развитие микроэлектроники и вычислительной техники привело к резкому повышению ее качественных показателей: уменьшению габаритов,
- 7. Микроэлектроника - область электроники, занимающаяся созданием электронных функциональных узлов, блоков и устройств в микроминиатюрном интегральном исполнении.
- 8. Вычислительная техника, совокупность технических и математических средств, методов и приёмов, используемых для облегчения и ускорения решения
- 9. Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного
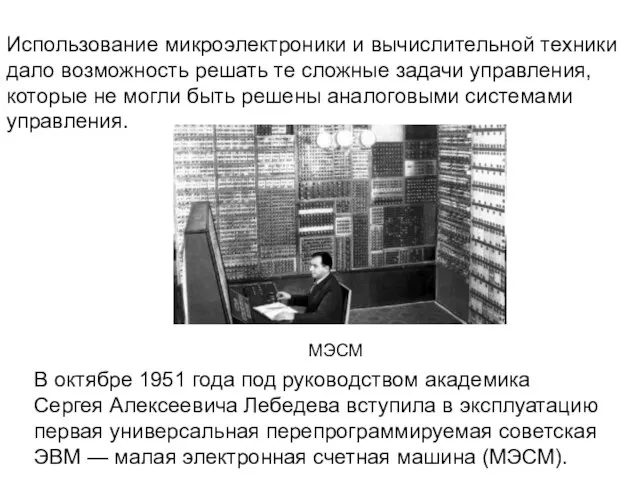
- 10. Использование микроэлектроники и вычислительной техники дало возможность решать те сложные задачи управления, которые не могли быть
- 11. Аналоговая электронная система управления Система состоит из манипуляторов, соединительных кабелей и модульного электронного блока управления, которые
- 12. Применение микроэлектроники и вычислительной техники имеет существенные преимущества перед аналоговыми системами управления. К таким преимуществам можно
- 13. Первое направление обусловлено применением вычислительной техники при автоматизации управления отдельных технологических объектов, когда вычислительное устройство включено
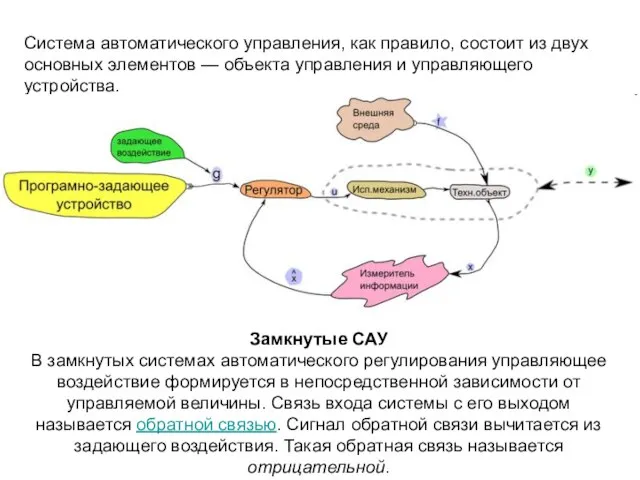
- 14. Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления и управляющего устройства.
- 15. Второе направление связано с автоматизацией группы технологических объектов, объединенных одним целевым назначением, например цеха. В этом
- 16. Раздел 1. Программное обеспечение цифровых систем управления 1.1. Постановка задачи Для сбора и обработки информации и
- 17. Промышленный контроллер — управляющее устройство (контроллер — управляющее устройство (контроллер от англ. control — управлять), применяемое
- 18. Применение в замкнутом контуре системы управления промышленного контроллера позволяет часть функций системы управления перевести с аппаратных
- 19. Но применение промышленных контроллеров в системах управления требует: 1) рассчитывать систему управления не как аналоговую, а
- 20. 1.2. Структуры цифровых систем управления Цифровая система управления представляет собой структуру, состоящую из двух частей: аналоговой
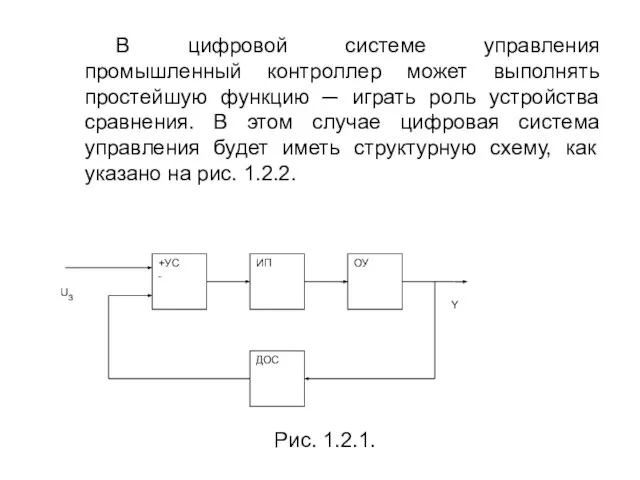
- 21. В большинстве случаев аналоговая система управления содержит в общем случае (рис. 1.2.1) объект управления (ОУ), управляемый
- 22. В цифровой системе управления промышленный контроллер может выполнять простейшую функцию ─ играть роль устройства сравнения. В
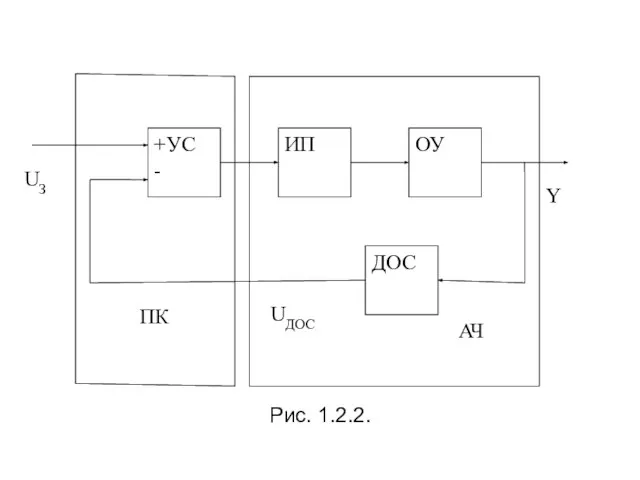
- 23. Структурная схема цифровой системы управления (рис. 1.2.2) позволяет сделать вывод, что любая цифровая система должна состоять
- 24. Рис. 1.2.2.
- 25. Необходимо подчеркнуть, что промышленный контроллер может обрабатывать информацию, только если она выражена в цифровой форме. Поэтому
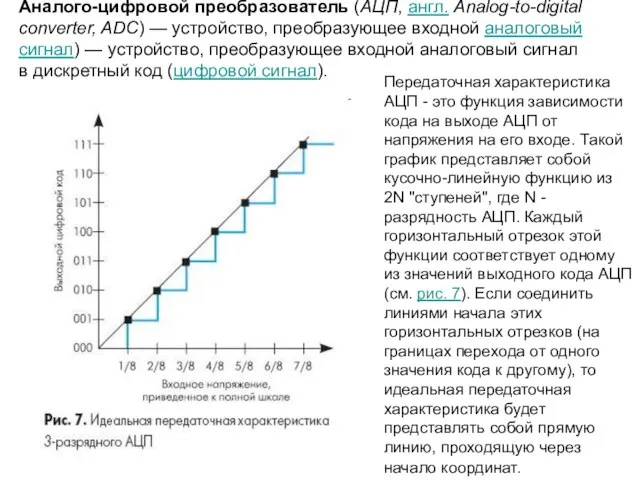
- 26. Аналого-цифровой преобразователь (АЦП, англ. Analog-to-digital converter, ADC) — устройство, преобразующее входной аналоговый сигнал) — устройство, преобразующее
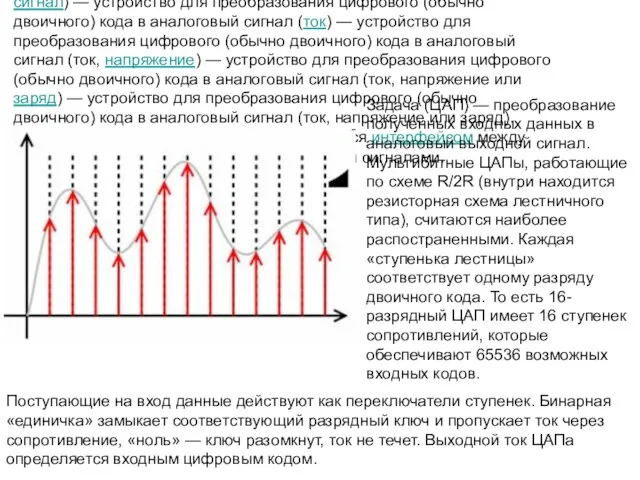
- 27. Цифро-аналоговый преобразователь (ЦАП) — устройство для преобразования цифрового (обычно двоичного) кода в аналоговый сигнал) — устройство
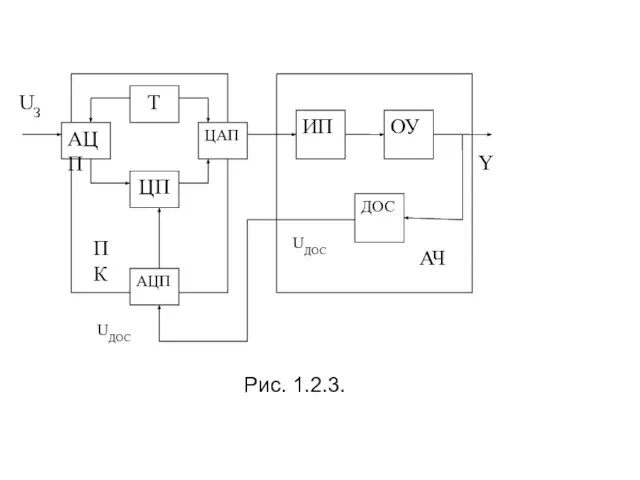
- 28. Детализированная структурная схема цифровой системы управления с промышленным контроллером в замкнутом контуре представлена на рис. 1.2.3.
- 29. Рис. 1.2.3.
- 30. На базе сигнала ошибки формируется в цифро-аналоговом преобразователе (ЦАП) аналоговый сигнал управления регулируемым источником питания (ИП).
- 31. Сигнал задающего воздействия и сигнал с датчика обратной связи подаются в аналого-цифровые преобразователи через определенные промежутки
- 32. Первым этапом разработки цифровой системы управления является определение влияния процессов квантования сигналов по уровню в аналого-цифровых
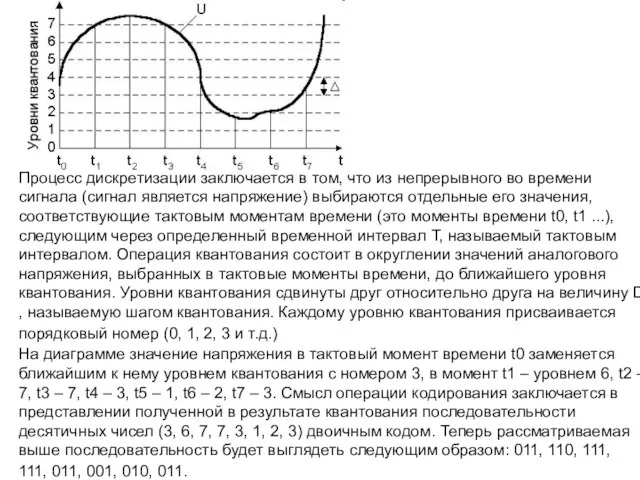
- 33. Процесс дискретизации заключается в том, что из непрерывного во времени сигнала (сигнал является напряжение) выбираются отдельные
- 34. Так как с цифро-аналогового преобразователя на вход регулируемого источника питания поступают ступенчатые сигналы, то основной задачей
- 35. 2. Наличие квантования по уровню сигнала на входе при помощи аналого-цифрового преобразователя (АЦП) и на выходе
- 36. 1.4. Квантования сигнала по времени Процедура преобразования мгновенных значений непрерывного сигнала через определенные промежутки времени (tk)
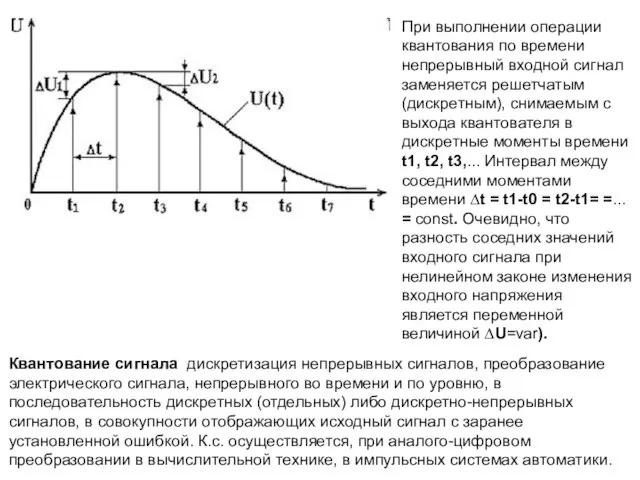
- 37. Квантование сигнала дискретизация непрерывных сигналов, преобразование электрического сигнала, непрерывного во времени и по уровню, в последовательность
- 38. Одним из вариантов решения вопроса нахождения периода квантования по времени является задание величины погрешности (δ), которую
- 39. Сигнал задающего воздействия и сигнал с датчика обратной связи подаются в аналого-цифровые преобразователи через определенные промежутки
- 40. Рациональный выбор величины периода квантования по времени определяет качество цифровой системы управления. С одной стороны он
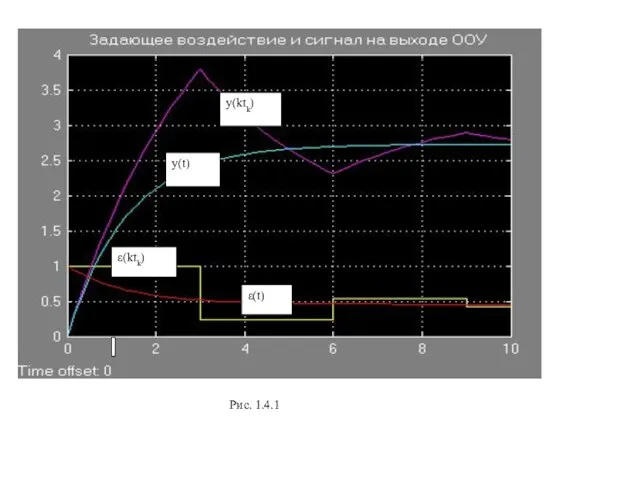
- 41. На рис. 1.4.1 представлены результаты моделирования двух систем управления. Обе системы описываются передаточными функциями апериодических звеньев.
- 42. В аналоговой системе сигнал ошибки ε(t) в начальный момент времени равен задающему воздействию (единице), так как
- 44. В цифровой системе сигнал ошибки ε(ktk) также в начальный момент времени равен величине задающего воздействия (единице).
- 45. Следовательно, значительная величина периода квантования приводит к колебательным процессам в цифровых системах управления. Уменьшение величины периода
- 46. Однако чем меньше величина периода квантования по времени, тем интенсивнее работа промышленного контроллера. Увеличение интенсивности работы
- 47. В этом случае необходимо создать две системы ─ исходную аналоговую и цифровую системы управления. Вводя различные
- 48. Для определения величины периода квантования может быть использована прикладная программа для персонального компьютера MatLab+Simulink. Чтобы определить
- 49. 2. На обе модели должен подаваться входной сигнал с одного источника (задающее воздействие). Выходные сигналы моделей
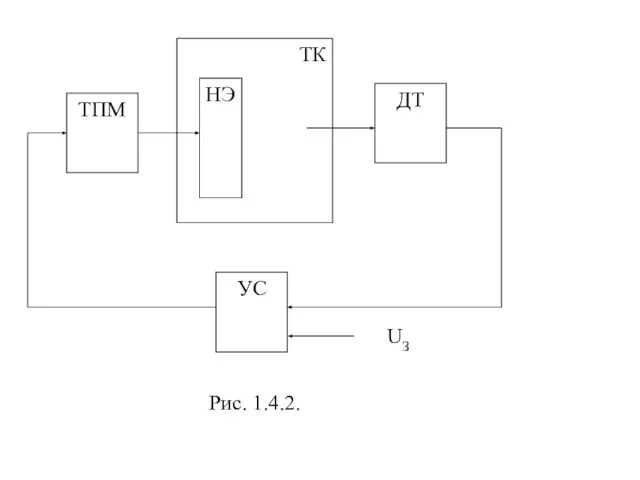
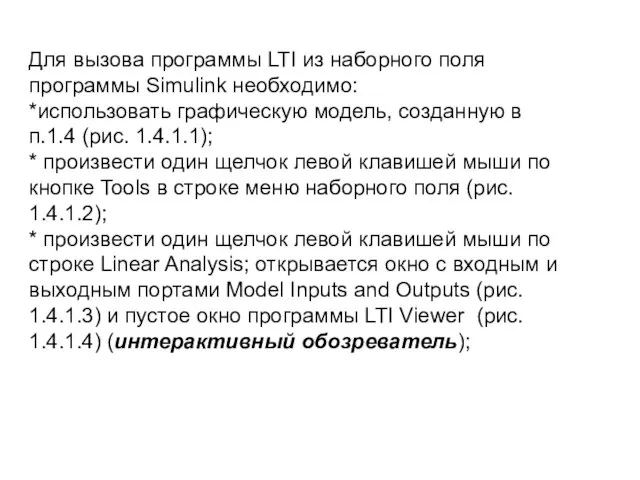
- 50. Пример 1.4.1. Рассчитать параметры, найти передаточные функции и построить структурную схему в наборном поле программы Simulink
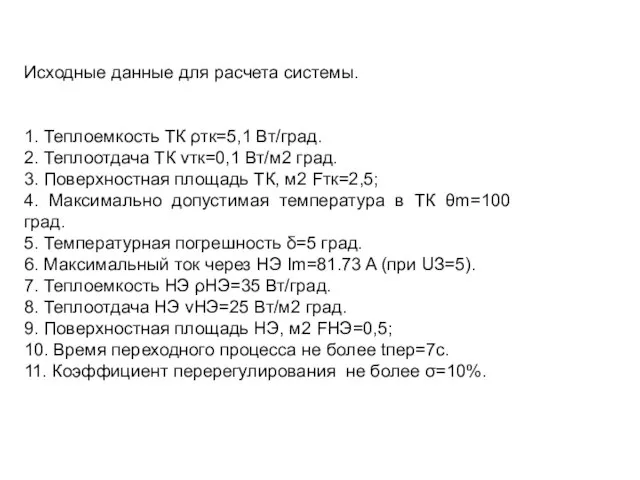
- 52. Исходные данные для расчета системы. 1. Теплоемкость ТК ρтк=5,1 Вт/град. 2. Теплоотдача ТК νтк=0,1 Вт/м2 град.
- 53. 1. Нагревательный элемент Если по спирали НЭ протекает электрический ток IНЭ, то энергия, подаваемая к НЭ
- 54. Обозначим − постоянная времени НЭ; − коэффициент преобразования НЭ.
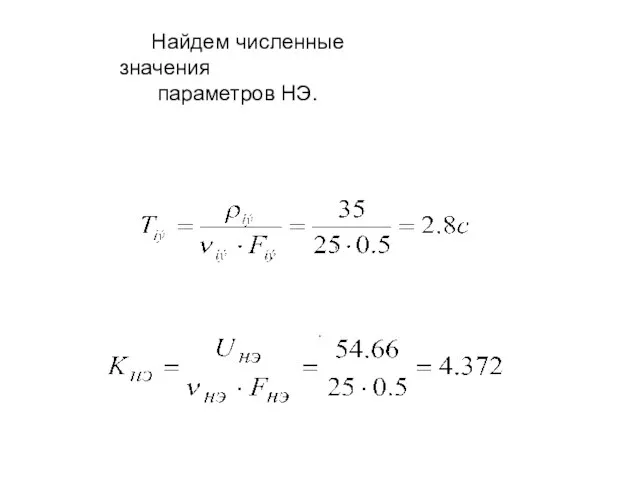
- 55. Найдем численные значения параметров НЭ. , .
- 56. Передаточная функция НЭ будет иметь вид .
- 57. 2. Термокамера Если внутри ТК выделяется тепло с поверхности НЭ, то это тепло, подаваемое за промежуток
- 58. Обозначим − постоянная времени ТК; − коэффициент преобразования ТК.
- 59. Найдем численные значения параметров ТК. , .
- 60. Передаточная функция ТК будет иметь вид .
- 61. 3.Тиристорный преобразователь мощности В системе в качестве регулируемого источника питания используется тиристорный преобразователь мощности. Тиристорный преобразователь
- 62. В данном случае − постоянная времени ТПМ (m−количество фаз напряжения питания, m=3; f − промышленная частота
- 63. Передаточный коэффициент будет равен . Передаточная функция тиристорного преобразователя мощности в численном значении будет иметь вид
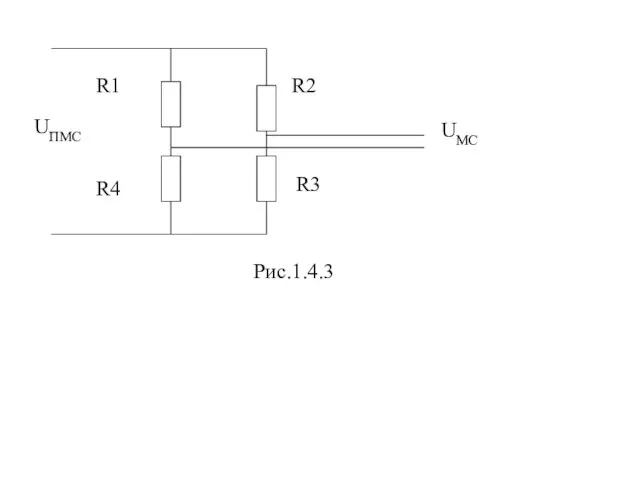
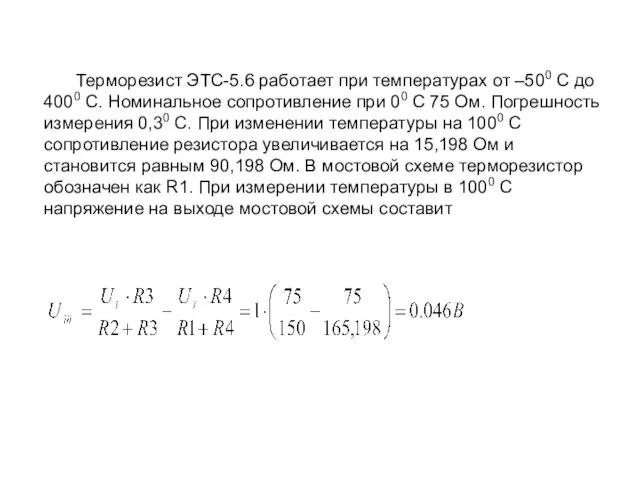
- 64. 4. Датчик температуры В качестве датчика температуры используется термпсопротивление ЭТС-5.6, включенное в мостовую схему постоянного тока.
- 66. Терморезист ЭТС-5.6 работает при температурах от –500 С до 4000 С. Номинальное сопротивление при 00 С
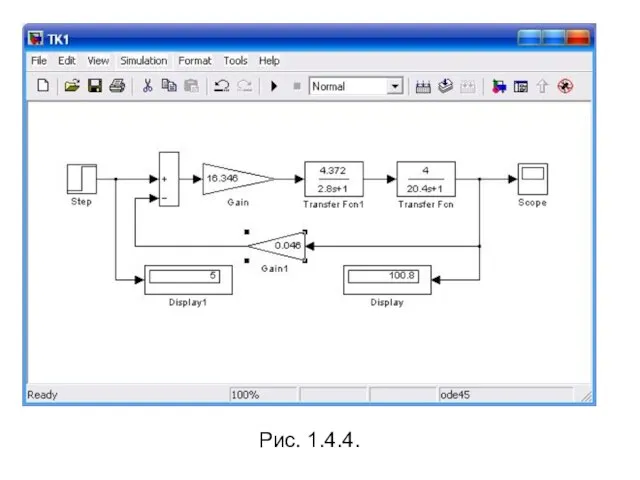
- 67. На рис. 1.4.4 построена структурная схема аналоговой системы управления температурой в термокамере. На входе системы установлено
- 68. Рис. 1.4.4.
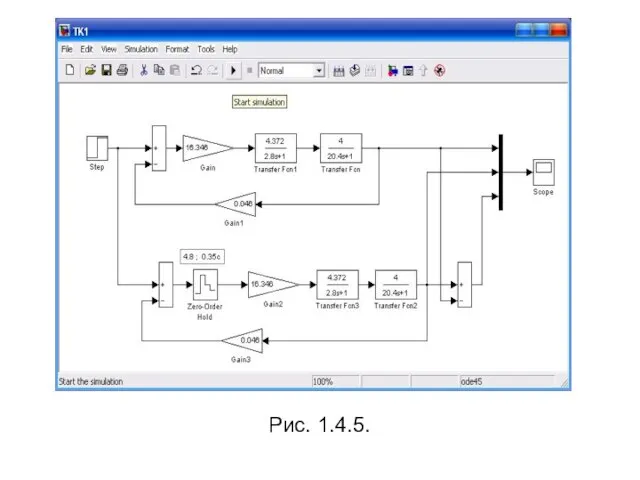
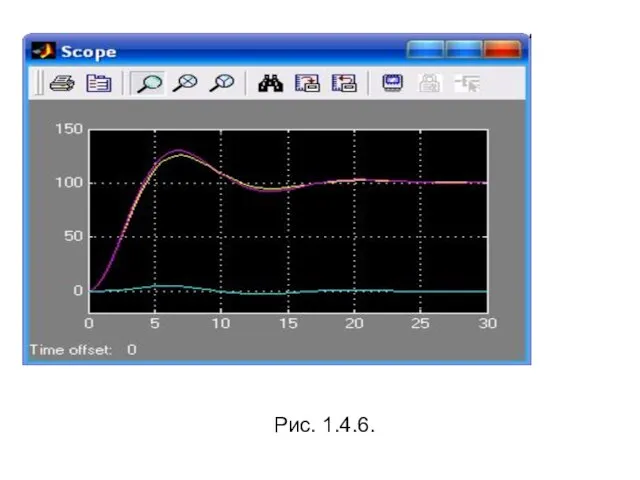
- 71. Пример 1.4.2. Определить оптимальный период квантования по времени в цифровой системе управления при заданной погрешности выходного
- 72. Рис. 1.4.5.
- 73. Рис. 1.4.6. Рис. 1.4.6.
- 74. На рис. 1.4.6 верхняя кривая характеризует выходной параметр цифровой системы управления. Средняя кривая характеризует выходной параметр
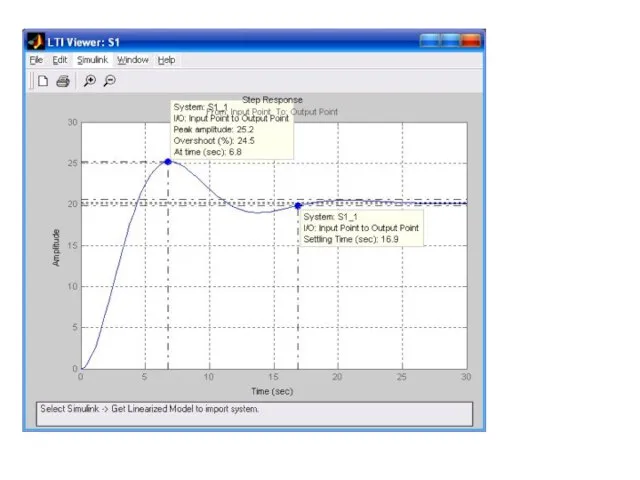
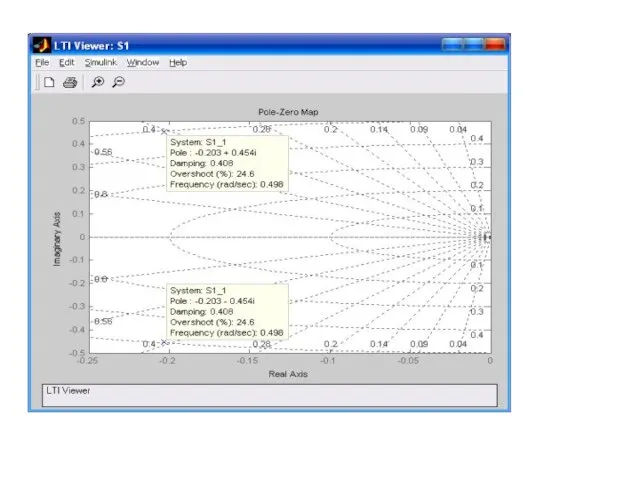
- 75. 1.4.1. Определение качественных показателей исходной аналоговой системы управления Для определения качественных показателей СУ используется подпрограмма Control
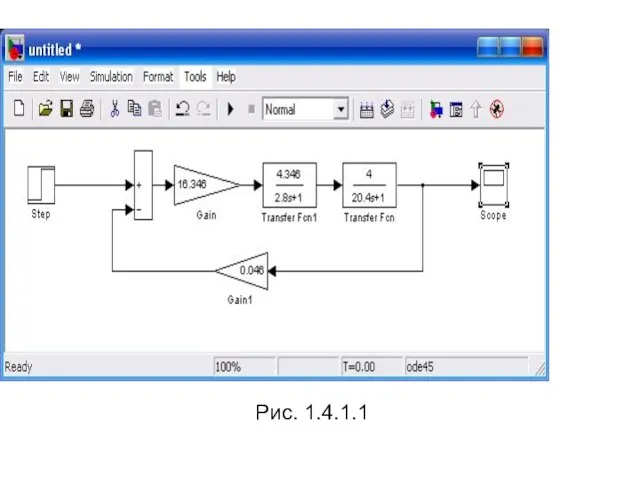
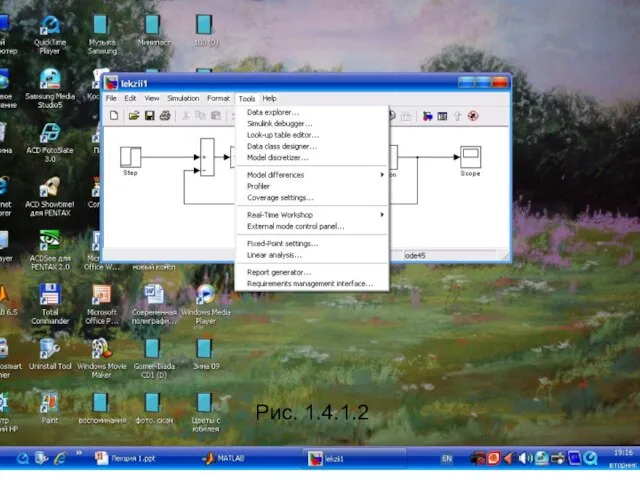
- 76. Для вызова программы LTI из наборного поля программы Simulink необходимо: *использовать графическую модель, созданную в п.1.4
- 77. Рис. 1.4.1.1
- 78. Рис. 1.4.1.2
- 79. Рис. 1.4.1.3
- 80. Рис. 1.4.1.4
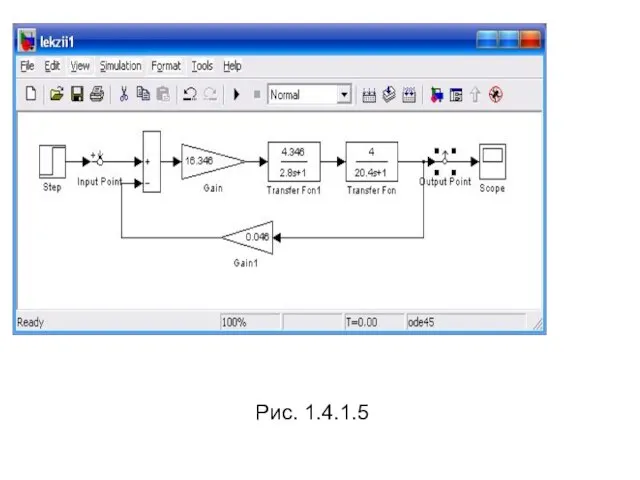
- 81. *перетащить входной и выходной порты в наборное поле и установить порт Input Point (входной порт) на
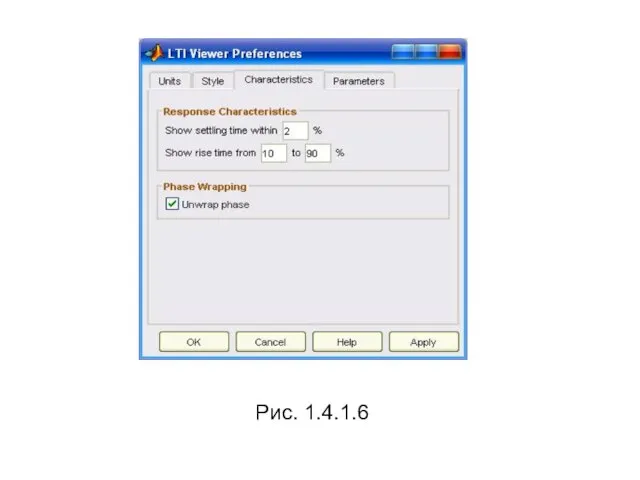
- 82. Рис. 1.4.1.5
- 83. Рис. 1.4.1.6
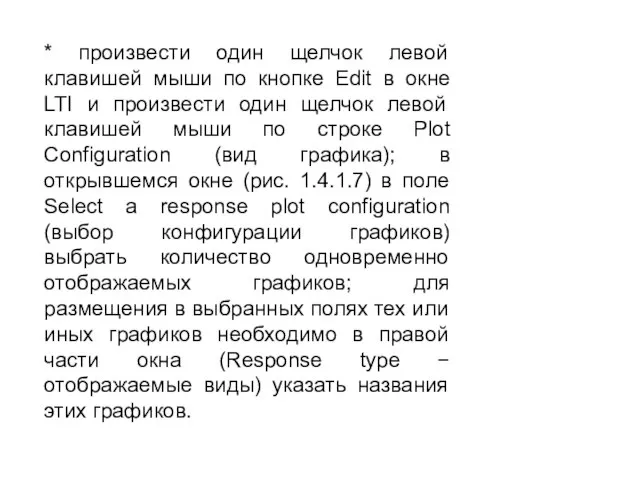
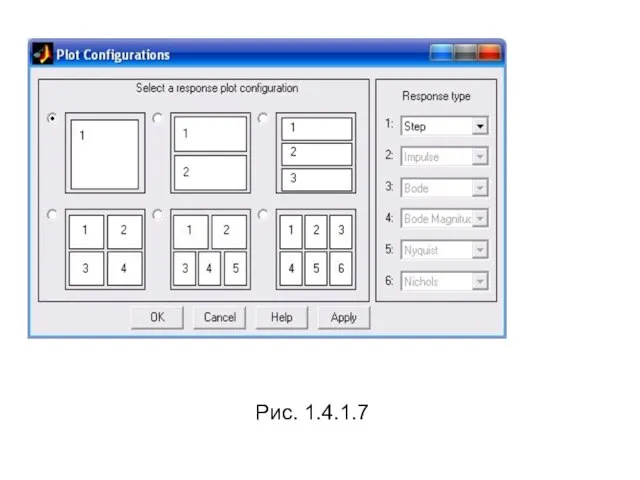
- 84. * произвести один щелчок левой клавишей мыши по кнопке Edit в окне LTI и произвести один
- 85. Рис. 1.4.1.7
- 86. Программа LTI позволяет отобразить следующие графики: *Step − реакция системы на единичную ступенчатую функцию; *Impulse −
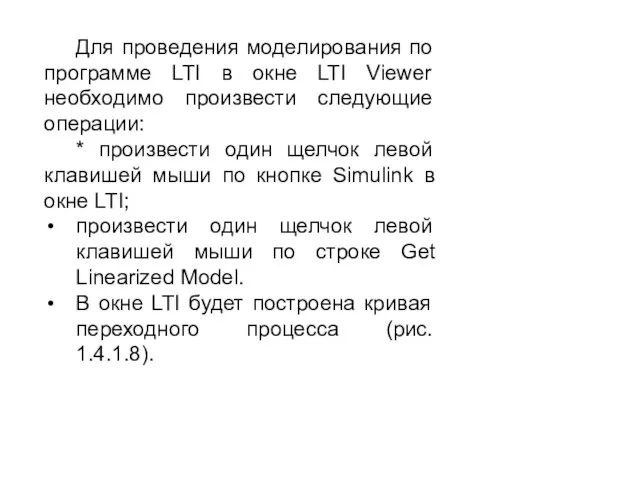
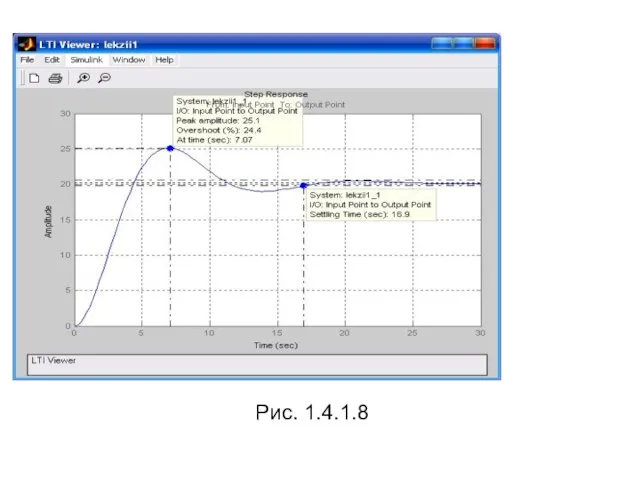
- 87. Для проведения моделирования по программе LTI в окне LTI Viewer необходимо произвести следующие операции: * произвести
- 88. Рис. 1.4.1.8
- 89. С целью облегчения проведения анализа выводимых графиков в программе LTI имеется набор следующего инструментария. 1. При
- 90. *Peak Response − пик изменяющейся характеристики; *Setting Time − время переходного процесса; *Rise Time − максимальная
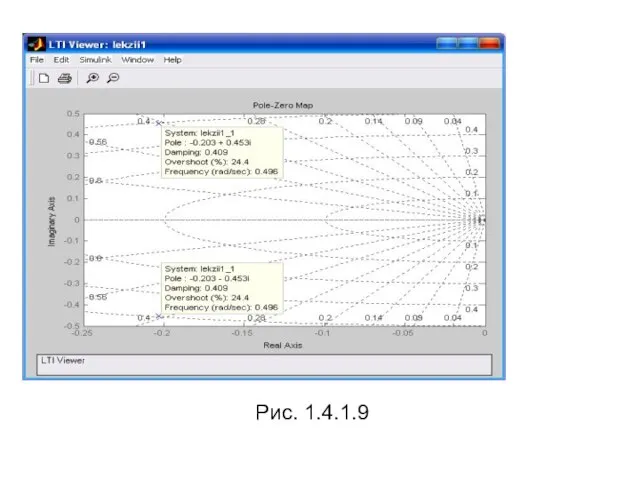
- 91. Рис. 1.4.1.9
- 92. 3.1. Вывод передаточной функции двигателя постоянного тока с независимым возбуждением. В соответствии с законом Кирхгофа где
- 93. Уравнение вращения ротора двигателя имеет вид MД=МС, где МД−вращающий момент двигателя; МС−момент сопротивления. Вращающий момент двигателя
- 94. В операторной форме это уравнение примет вид Решим уравнения (3.1) и (3.2) относительно тока якоря или
- 95. Сгруппируем переменную ω в левой части уравнения . Умножим и разделим коэффициент при s2 на R
- 96. Обозначим −электромагнитная постоянная времени двигателя; −электромеханическая постоянная времени двигателя; −добротность. Окончательно можно записать .
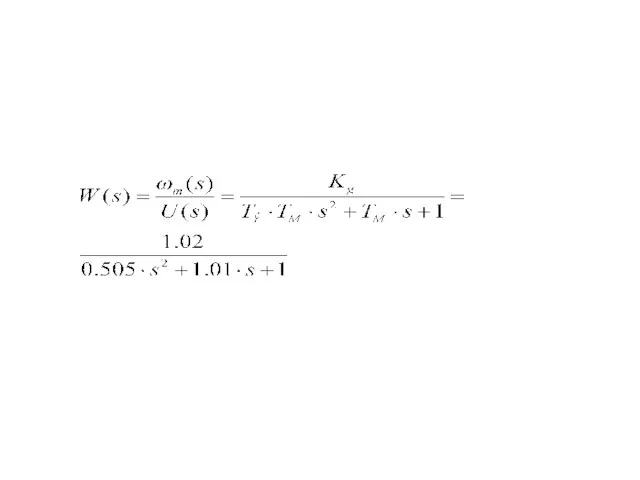
- 97. Передаточная функция электрического двигателя с независимым возбуждением примет вид .
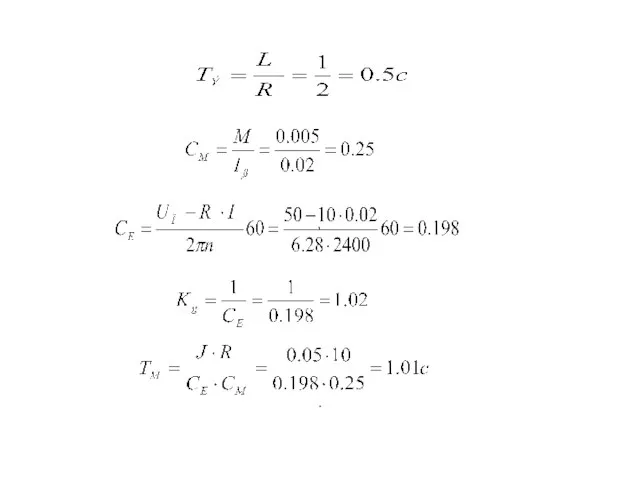
- 98. , .
- 100. 3.2. Вывод передаточной функции и расчет параметров усилителя мощности В качестве усилителя мощности в лабораторной установке
- 102. Скачать презентацию
Слайд 2Объем дисциплины и виды учебной нагрузки.
Дисциплина изучается в двух семестрах.
1 семестр.
Лекции- 26
Объем дисциплины и виды учебной нагрузки.
Дисциплина изучается в двух семестрах.
1 семестр.
Лекции- 26
Слайд 3Литература
1. В.А. Бесекерский, Е. П. Попов. Теория систем автоматического регулирования. М. Из-во
Литература
1. В.А. Бесекерский, Е. П. Попов. Теория систем автоматического регулирования. М. Из-во
Слайд 4Методические указания к изучению дисциплины ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
КОМПЬЮТЕРНЫХ СИСТЕМ
УПРАВЛЕНИЯ
Для успешного изучения
Методические указания к изучению дисциплины ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
КОМПЬЮТЕРНЫХ СИСТЕМ
УПРАВЛЕНИЯ
Для успешного изучения
Слайд 5Весь курс предлагаемой дисциплины условно разбит на четыре раздела.
Разработка непрерывной системы
Весь курс предлагаемой дисциплины условно разбит на четыре раздела.
Разработка непрерывной системы
Слайд 6Введение
Быстрое развитие микроэлектроники и вычислительной техники привело к резкому повышению ее качественных
Введение
Быстрое развитие микроэлектроники и вычислительной техники привело к резкому повышению ее качественных
Слайд 7Микроэлектроника - область электроники, занимающаяся созданием электронных функциональных узлов, блоков и устройств
Микроэлектроника - область электроники, занимающаяся созданием электронных функциональных узлов, блоков и устройств
Слайд 8Вычислительная техника, совокупность технических и математических средств, методов и приёмов, используемых для
Вычислительная техника, совокупность технических и математических средств, методов и приёмов, используемых для
Слайд 9Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования
Слайд 10Использование микроэлектроники и вычислительной техники дало возможность решать те сложные задачи управления,
Использование микроэлектроники и вычислительной техники дало возможность решать те сложные задачи управления,
Слайд 11Аналоговая электронная система управления
Система состоит из манипуляторов, соединительных кабелей и модульного
Аналоговая электронная система управления
Система состоит из манипуляторов, соединительных кабелей и модульного

Слайд 12 Применение микроэлектроники и вычислительной техники имеет существенные преимущества перед аналоговыми системами управления.
Применение микроэлектроники и вычислительной техники имеет существенные преимущества перед аналоговыми системами управления.
Слайд 13 Первое направление обусловлено применением вычислительной техники при автоматизации управления отдельных технологических объектов,
Первое направление обусловлено применением вычислительной техники при автоматизации управления отдельных технологических объектов,
Слайд 14Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления
Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления
Слайд 15 Второе направление связано с автоматизацией группы технологических объектов, объединенных одним целевым назначением,
Второе направление связано с автоматизацией группы технологических объектов, объединенных одним целевым назначением,
Слайд 16Раздел 1. Программное обеспечение цифровых систем управления
1.1. Постановка задачи
Для сбора и обработки
Раздел 1. Программное обеспечение цифровых систем управления
1.1. Постановка задачи
Для сбора и обработки
Слайд 17Промышленный контроллер — управляющее устройство (контроллер — управляющее устройство (контроллер от англ. control — управлять), применяемое
Промышленный контроллер — управляющее устройство (контроллер — управляющее устройство (контроллер от англ. control — управлять), применяемое

Слайд 18 Применение в замкнутом контуре системы управления промышленного контроллера позволяет часть функций системы
Применение в замкнутом контуре системы управления промышленного контроллера позволяет часть функций системы
Слайд 19 Но применение промышленных контроллеров в системах управления требует:
1) рассчитывать систему управления не
Но применение промышленных контроллеров в системах управления требует:
1) рассчитывать систему управления не
Слайд 201.2. Структуры цифровых систем управления
Цифровая система управления представляет собой структуру, состоящую из
1.2. Структуры цифровых систем управления
Цифровая система управления представляет собой структуру, состоящую из
Слайд 21В большинстве случаев аналоговая система управления содержит в общем случае (рис. 1.2.1)
В большинстве случаев аналоговая система управления содержит в общем случае (рис. 1.2.1)
Слайд 22В цифровой системе управления промышленный контроллер может выполнять простейшую функцию ─ играть
В цифровой системе управления промышленный контроллер может выполнять простейшую функцию ─ играть
Слайд 23Структурная схема цифровой системы управления (рис. 1.2.2) позволяет сделать вывод, что любая
Структурная схема цифровой системы управления (рис. 1.2.2) позволяет сделать вывод, что любая
Слайд 24Рис. 1.2.2.
Рис. 1.2.2.
Слайд 25Необходимо подчеркнуть, что промышленный контроллер может обрабатывать информацию, только если она выражена
Необходимо подчеркнуть, что промышленный контроллер может обрабатывать информацию, только если она выражена
Слайд 26Аналого-цифровой преобразователь (АЦП, англ. Analog-to-digital converter, ADC) — устройство, преобразующее входной аналоговый сигнал) — устройство,
Аналого-цифровой преобразователь (АЦП, англ. Analog-to-digital converter, ADC) — устройство, преобразующее входной аналоговый сигнал) — устройство,
Слайд 27Цифро-аналоговый преобразователь (ЦАП) — устройство для преобразования цифрового (обычно двоичного) кода в аналоговый
Цифро-аналоговый преобразователь (ЦАП) — устройство для преобразования цифрового (обычно двоичного) кода в аналоговый
Слайд 28Детализированная структурная схема цифровой системы управления с промышленным контроллером в замкнутом контуре
Детализированная структурная схема цифровой системы управления с промышленным контроллером в замкнутом контуре
Слайд 29Рис. 1.2.3.
Рис. 1.2.3.
Слайд 30На базе сигнала ошибки формируется в цифро-аналоговом преобразователе (ЦАП) аналоговый сигнал управления
На базе сигнала ошибки формируется в цифро-аналоговом преобразователе (ЦАП) аналоговый сигнал управления
Слайд 31Сигнал задающего воздействия и сигнал с датчика обратной связи подаются в аналого-цифровые
Сигнал задающего воздействия и сигнал с датчика обратной связи подаются в аналого-цифровые
Слайд 32Первым этапом разработки цифровой системы управления является определение влияния процессов квантования сигналов
Первым этапом разработки цифровой системы управления является определение влияния процессов квантования сигналов
Слайд 33Процесс дискретизации заключается в том, что из непрерывного во времени сигнала (сигнал
Процесс дискретизации заключается в том, что из непрерывного во времени сигнала (сигнал
Слайд 34Так как с цифро-аналогового преобразователя на вход регулируемого источника питания поступают ступенчатые
Так как с цифро-аналогового преобразователя на вход регулируемого источника питания поступают ступенчатые
Слайд 352. Наличие квантования по уровню сигнала на входе при помощи аналого-цифрового преобразователя
2. Наличие квантования по уровню сигнала на входе при помощи аналого-цифрового преобразователя
Слайд 361.4. Квантования сигнала по времени
Процедура преобразования мгновенных значений непрерывного сигнала через определенные
1.4. Квантования сигнала по времени
Процедура преобразования мгновенных значений непрерывного сигнала через определенные
Слайд 37Квантование сигнала дискретизация непрерывных сигналов, преобразование электрического сигнала, непрерывного во времени и
Квантование сигнала дискретизация непрерывных сигналов, преобразование электрического сигнала, непрерывного во времени и
Слайд 38 Одним из вариантов решения вопроса нахождения периода квантования по времени является задание
Одним из вариантов решения вопроса нахождения периода квантования по времени является задание
Слайд 39Сигнал задающего воздействия и сигнал с датчика обратной связи подаются в аналого-цифровые
Сигнал задающего воздействия и сигнал с датчика обратной связи подаются в аналого-цифровые
Слайд 40Рациональный выбор величины периода квантования по времени определяет качество цифровой системы управления.
Рациональный выбор величины периода квантования по времени определяет качество цифровой системы управления.
Слайд 41 На рис. 1.4.1 представлены результаты моделирования двух систем управления. Обе системы описываются
На рис. 1.4.1 представлены результаты моделирования двух систем управления. Обе системы описываются
Слайд 42В аналоговой системе сигнал ошибки ε(t) в начальный момент времени равен задающему
В аналоговой системе сигнал ошибки ε(t) в начальный момент времени равен задающему
Слайд 44В цифровой системе сигнал ошибки ε(ktk) также в начальный момент времени равен
В цифровой системе сигнал ошибки ε(ktk) также в начальный момент времени равен
Слайд 45Следовательно, значительная величина периода квантования приводит к колебательным процессам в цифровых системах
Следовательно, значительная величина периода квантования приводит к колебательным процессам в цифровых системах
Слайд 46Однако чем меньше величина периода квантования по времени, тем интенсивнее работа промышленного
Однако чем меньше величина периода квантования по времени, тем интенсивнее работа промышленного
Слайд 47В этом случае необходимо создать две системы ─ исходную аналоговую и цифровую
В этом случае необходимо создать две системы ─ исходную аналоговую и цифровую
Слайд 48Для определения величины периода квантования может быть использована прикладная программа для персонального
Для определения величины периода квантования может быть использована прикладная программа для персонального
Слайд 492. На обе модели должен подаваться входной сигнал с одного источника (задающее
2. На обе модели должен подаваться входной сигнал с одного источника (задающее
Слайд 50Пример 1.4.1.
Рассчитать параметры, найти передаточные функции и построить структурную схему в наборном
Пример 1.4.1.
Рассчитать параметры, найти передаточные функции и построить структурную схему в наборном
Слайд 52Исходные данные для расчета системы.
1. Теплоемкость ТК ρтк=5,1 Вт/град.
2. Теплоотдача ТК νтк=0,1
Исходные данные для расчета системы.
1. Теплоемкость ТК ρтк=5,1 Вт/град.
2. Теплоотдача ТК νтк=0,1
Слайд 531. Нагревательный элемент
Если по спирали НЭ протекает электрический ток IНЭ, то энергия,
1. Нагревательный элемент
Если по спирали НЭ протекает электрический ток IНЭ, то энергия,
Слайд 54Обозначим
− постоянная времени НЭ;
− коэффициент
преобразования НЭ.
− постоянная времени НЭ;
− коэффициент
преобразования НЭ.
Слайд 55Найдем численные значения
параметров НЭ.
,
.
Найдем численные значения
параметров НЭ.
,
.
Слайд 56Передаточная функция НЭ будет
иметь вид
.
Передаточная функция НЭ будет
иметь вид
.
Слайд 572. Термокамера
Если внутри ТК выделяется тепло с поверхности НЭ, то это тепло,
2. Термокамера
Если внутри ТК выделяется тепло с поверхности НЭ, то это тепло,
Слайд 58Обозначим
− постоянная времени ТК;
− коэффициент
преобразования ТК.
Обозначим
− постоянная времени ТК;
− коэффициент
преобразования ТК.
Слайд 59Найдем численные значения параметров ТК.
,
.
Найдем численные значения параметров ТК.
,
.
Слайд 60Передаточная функция ТК будет иметь вид
.
Передаточная функция ТК будет иметь вид
.
Слайд 613.Тиристорный преобразователь мощности
В системе в качестве регулируемого источника питания используется тиристорный преобразователь
3.Тиристорный преобразователь мощности
В системе в качестве регулируемого источника питания используется тиристорный преобразователь
Слайд 62 В данном случае
− постоянная времени ТПМ (m−количество фаз напряжения питания, m=3;
В данном случае
− постоянная времени ТПМ (m−количество фаз напряжения питания, m=3;
Слайд 63Передаточный коэффициент будет равен
.
Передаточная функция тиристорного преобразователя мощности в численном значении будет
Передаточный коэффициент будет равен
.
Передаточная функция тиристорного преобразователя мощности в численном значении будет
Слайд 644. Датчик температуры
В качестве датчика температуры используется термпсопротивление ЭТС-5.6, включенное в мостовую
4. Датчик температуры
В качестве датчика температуры используется термпсопротивление ЭТС-5.6, включенное в мостовую
Слайд 66 Терморезист ЭТС-5.6 работает при температурах от –500 С до 4000 С. Номинальное
Терморезист ЭТС-5.6 работает при температурах от –500 С до 4000 С. Номинальное
Слайд 67На рис. 1.4.4 построена структурная схема аналоговой системы управления температурой в термокамере.
На рис. 1.4.4 построена структурная схема аналоговой системы управления температурой в термокамере.
Слайд 68Рис. 1.4.4.
Рис. 1.4.4.
Слайд 71Пример 1.4.2.
Определить оптимальный период квантования по времени в цифровой системе управления при
Пример 1.4.2.
Определить оптимальный период квантования по времени в цифровой системе управления при
Слайд 72Рис. 1.4.5.
Рис. 1.4.5.
Слайд 73Рис. 1.4.6.
Рис. 1.4.6.
Рис. 1.4.6.
Рис. 1.4.6.
Слайд 74На рис. 1.4.6 верхняя кривая характеризует выходной параметр цифровой системы управления. Средняя
На рис. 1.4.6 верхняя кривая характеризует выходной параметр цифровой системы управления. Средняя
Слайд 751.4.1. Определение качественных показателей исходной аналоговой системы управления
Для определения качественных показателей СУ
1.4.1. Определение качественных показателей исходной аналоговой системы управления
Для определения качественных показателей СУ
Слайд 76Для вызова программы LTI из наборного поля программы Simulink необходимо:
*использовать графическую модель,
Для вызова программы LTI из наборного поля программы Simulink необходимо:
*использовать графическую модель,
Слайд 77Рис. 1.4.1.1
Рис. 1.4.1.1
Слайд 78Рис. 1.4.1.2
Рис. 1.4.1.2
Слайд 79Рис. 1.4.1.3
Рис. 1.4.1.3
Слайд 80Рис. 1.4.1.4
Рис. 1.4.1.4
Слайд 81*перетащить входной и выходной порты в наборное поле и установить порт Input
*перетащить входной и выходной порты в наборное поле и установить порт Input
Слайд 82Рис. 1.4.1.5
Рис. 1.4.1.5
Слайд 83Рис. 1.4.1.6
Рис. 1.4.1.6
Слайд 84* произвести один щелчок левой клавишей мыши по кнопке Edit в окне
* произвести один щелчок левой клавишей мыши по кнопке Edit в окне
Слайд 85Рис. 1.4.1.7
Рис. 1.4.1.7
Слайд 86Программа LTI позволяет отобразить следующие графики:
*Step − реакция системы на единичную ступенчатую
Программа LTI позволяет отобразить следующие графики:
*Step − реакция системы на единичную ступенчатую
Слайд 87Для проведения моделирования по программе LTI в окне LTI Viewer необходимо произвести
Для проведения моделирования по программе LTI в окне LTI Viewer необходимо произвести
Слайд 88Рис. 1.4.1.8
Рис. 1.4.1.8
Слайд 89С целью облегчения проведения анализа выводимых графиков в программе LTI имеется набор
С целью облегчения проведения анализа выводимых графиков в программе LTI имеется набор
Слайд 90*Peak Response − пик изменяющейся характеристики;
*Setting Time − время переходного процесса;
*Rise Time
*Peak Response − пик изменяющейся характеристики;
*Setting Time − время переходного процесса;
*Rise Time
Слайд 91Рис. 1.4.1.9
Рис. 1.4.1.9
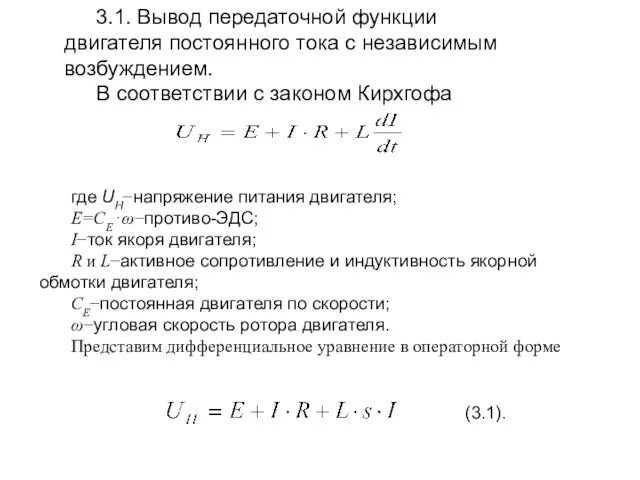
Слайд 923.1. Вывод передаточной функции двигателя постоянного тока с независимым возбуждением.
В соответствии с
3.1. Вывод передаточной функции двигателя постоянного тока с независимым возбуждением.
В соответствии с
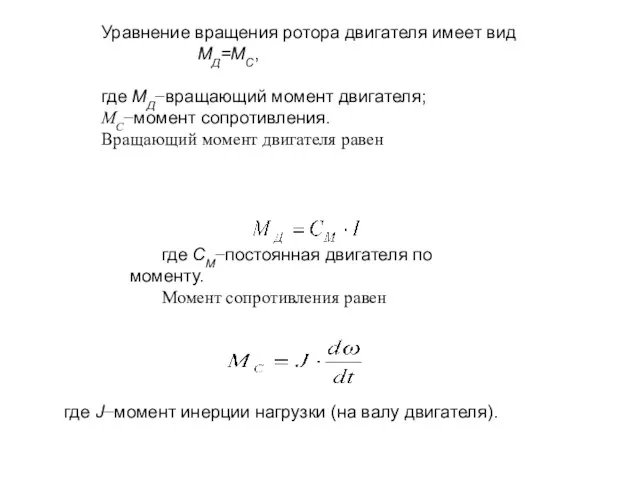
Слайд 93Уравнение вращения ротора двигателя имеет вид
MД=МС,
где МД−вращающий момент двигателя;
МС−момент сопротивления.
Вращающий момент двигателя
Уравнение вращения ротора двигателя имеет вид
MД=МС,
где МД−вращающий момент двигателя;
МС−момент сопротивления.
Вращающий момент двигателя
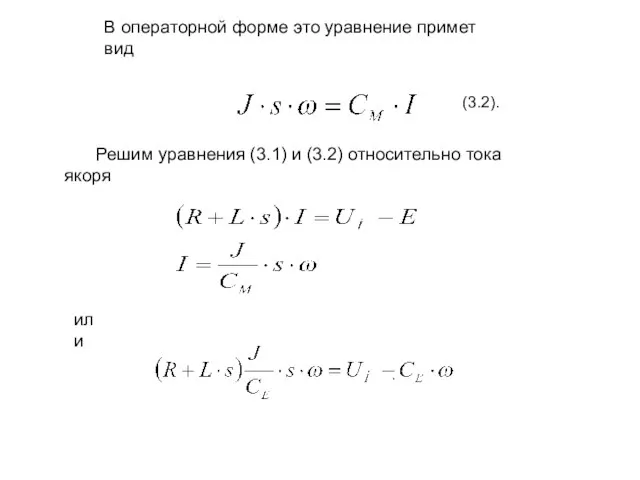
Слайд 94В операторной форме это уравнение примет вид
Решим уравнения (3.1) и (3.2)
В операторной форме это уравнение примет вид
Решим уравнения (3.1) и (3.2)
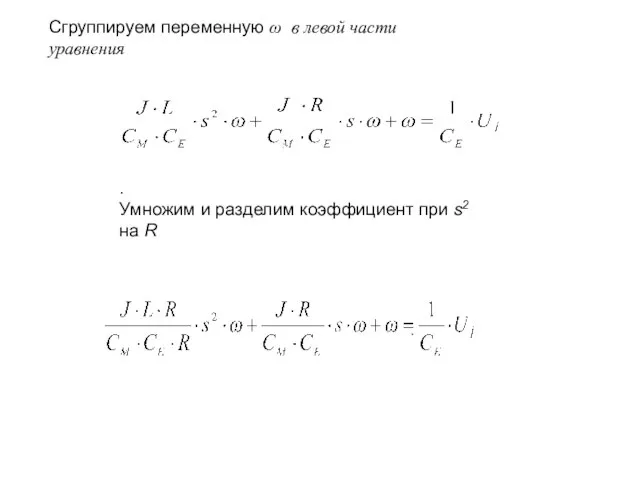
Слайд 95Сгруппируем переменную ω в левой части уравнения
.
Умножим и разделим коэффициент при s2
Сгруппируем переменную ω в левой части уравнения
.
Умножим и разделим коэффициент при s2
Слайд 96Обозначим
−электромагнитная постоянная времени двигателя;
−электромеханическая постоянная
времени двигателя;
−добротность.
Окончательно можно записать
.
Обозначим
−электромагнитная постоянная времени двигателя;
−электромеханическая постоянная
времени двигателя;
−добротность.
Окончательно можно записать
.
Слайд 97Передаточная функция электрического двигателя
с независимым возбуждением примет вид
.
Передаточная функция электрического двигателя
с независимым возбуждением примет вид
.
Слайд 98,
.
,
.
Слайд 1003.2. Вывод передаточной функции и расчет параметров усилителя мощности
В качестве усилителя мощности
3.2. Вывод передаточной функции и расчет параметров усилителя мощности
В качестве усилителя мощности
 Реклама - двигатель торговли
Реклама - двигатель торговли ИНТЕЛЛЕКТУАЛЬНАЯ ИГРА«АШКИ ИЛИ ГЭШКИ?»
ИНТЕЛЛЕКТУАЛЬНАЯ ИГРА«АШКИ ИЛИ ГЭШКИ?» Забастовка. Право на забастовку
Забастовка. Право на забастовку Какой бывает транспорт
Какой бывает транспорт Построение осей складок
Построение осей складок Kimono shop
Kimono shop Открытие Show-room РуДа в ТРЦ
Открытие Show-room РуДа в ТРЦ Решение задач на сложение и вычитание смешанных чисел
Решение задач на сложение и вычитание смешанных чисел Критерии деятельности классных руководителей начального звена за 2 полугодие
Критерии деятельности классных руководителей начального звена за 2 полугодие Презентация на тему Решение логарифмических уравнений
Презентация на тему Решение логарифмических уравнений Преподаватель: Жирнова Н.Ю. ОБ УЧАСТИИ ВО ВСЕРОССИЙСКИХ ПЕДАГОГИЧЕСКИХ КОНКУРСАХ.
Преподаватель: Жирнова Н.Ю. ОБ УЧАСТИИ ВО ВСЕРОССИЙСКИХ ПЕДАГОГИЧЕСКИХ КОНКУРСАХ. Яңы йыл байрамы
Яңы йыл байрамы Осциллограф H3015
Осциллограф H3015 Хранение и распределение нефти, нефтепродуктов и газа
Хранение и распределение нефти, нефтепродуктов и газа Кузмицкий Василий Федорович
Кузмицкий Василий Федорович Интересная физика
Интересная физика Как древние люди представляли себе Вселенную
Как древние люди представляли себе Вселенную Школа творческих открытий Русский авангард для детей. Контраст Встреча противоположностей
Школа творческих открытий Русский авангард для детей. Контраст Встреча противоположностей Вознекновение театрв 18 веке
Вознекновение театрв 18 веке История российского парламентаризма
История российского парламентаризма Группа в VKontakte Сообщество инфобизнесменов, проект ИнфоХит
Группа в VKontakte Сообщество инфобизнесменов, проект ИнфоХит Концепция «Единого окна»: ключевой инструмент упрощения процедур торговли и надлежащего управления Марио Апостолов, Р
Концепция «Единого окна»: ключевой инструмент упрощения процедур торговли и надлежащего управления Марио Апостолов, Р Романтизм 11 класс
Романтизм 11 класс Тест на тему: Сила упругости. Закон Гука
Тест на тему: Сила упругости. Закон Гука Manhattan
Manhattan Différenciation sociale du lexique
Différenciation sociale du lexique Samp Stories Epesode one(1)
Samp Stories Epesode one(1) Регрессивный анализ для выявления лучших агентов. Росгосстрах
Регрессивный анализ для выявления лучших агентов. Росгосстрах