РАЗРАБОТКА И ИССЛЕДОВАНИЕ ВОЗМОЖНОСТЕЙ ПРОГРАММИРУЕМОГО САМОХОДНОГО МЕХАТРОННОГО АППАРАТА Автор: Ривкин Андрей Маркович,
- РАЗРАБОТКА И ИССЛЕДОВАНИЕ ВОЗМОЖНОСТЕЙ ПРОГРАММИРУЕМОГО САМОХОДНОГО МЕХАТРОННОГО АППАРАТА Автор: Ривкин Андрей Маркович,

Содержание
- 2. Актуальность работы Работа на других планетах и исследование труднодоступных мест Автоматизация рутинных работ Автоматизация опасных для
- 3. Цель проекта: Исследование архитектуры и принципов построения мехатронных аппаратов Исследование датчиков Robo-PICA Исследование методов программирования микроконтроллера
- 4. Архитектура и компоненты СМА Механическая часть Рама Батарейный отсек Гусеницы Датчики (гибкое расположение) Электрическая часть Электрическая
- 5. Датчики и исполнительные устройства Базовый комплект датчиков ZX-03 - инфракрасный отражатель, позволяющий определить цвет объекта ZX-08
- 6. Пример: Инфракрасный отражатель ZX - 03 Испускает инфракрасный сигнал и затем ловит отражение этого инфракрасного сигнала
- 7. Программирование микроконтроллера Программа чтения с датчиков и отображения на дисплей Программа управления двигателями Программа вывода данных
- 8. Способы навигации – преимущества и недостатки Водитель-тренер Дорого Неточно GPS-навигация Дорого Не действует в закрытых помещениях
- 9. Методика исследования Выбор цветов разметки Анализ влияния внешних факторов: Освещенность Загрязненность Тип поверхности Создание образцов Создание
- 10. Выбор цветов разметки Вначале 9 основных цветов при одинаковых условиях Отличаются: Черный, Белый и Коричневый Создали
- 11. Анализ влияния типа освещения на показания датчика Показания не зависят от освещения Можно использовать в темноте
- 12. Анализ влияния загрязнений Загрязнения сильно искажают показания датчика Нельзя использовать на улице
- 13. Анализ влияния типа поверхности 4 различные поверхности с разной плотностью и текстурой Показания не зависят от
- 14. Результаты работы Был создан СМА Исследована архитектура, датчики и программирование СМА Мехатронные устройства на базе PIC
- 15. Демонстрация
- 17. Скачать презентацию
Слайд 2Актуальность работы
Работа на других планетах и исследование труднодоступных мест
Автоматизация рутинных работ
Автоматизация опасных
Актуальность работы
Работа на других планетах и исследование труднодоступных мест
Автоматизация рутинных работ
Автоматизация опасных
Слайд 3Цель проекта:
Исследование архитектуры и принципов построения мехатронных аппаратов
Исследование датчиков Robo-PICA
Исследование методов программирования
Цель проекта:
Исследование архитектуры и принципов построения мехатронных аппаратов
Исследование датчиков Robo-PICA
Исследование методов программирования
Слайд 4Архитектура и компоненты СМА
Механическая часть
Рама
Батарейный отсек
Гусеницы
Датчики (гибкое расположение)
Электрическая часть
Электрическая схемы выполнена на
Архитектура и компоненты СМА
Механическая часть
Рама
Батарейный отсек
Гусеницы
Датчики (гибкое расположение)
Электрическая часть
Электрическая схемы выполнена на

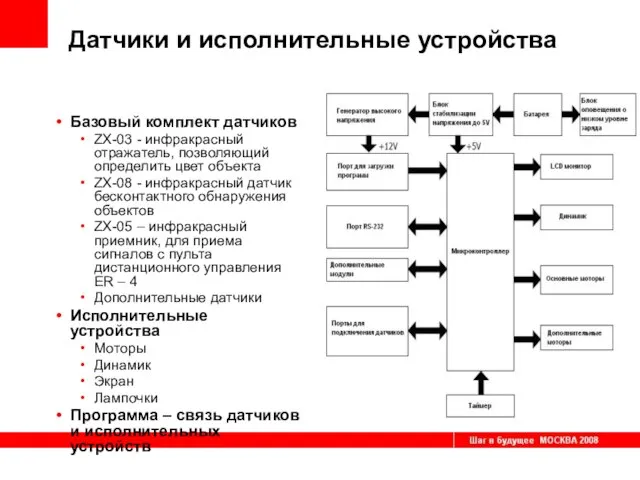
Слайд 5Датчики и исполнительные устройства
Базовый комплект датчиков
ZX-03 - инфракрасный отражатель, позволяющий определить цвет
Датчики и исполнительные устройства
Базовый комплект датчиков
ZX-03 - инфракрасный отражатель, позволяющий определить цвет
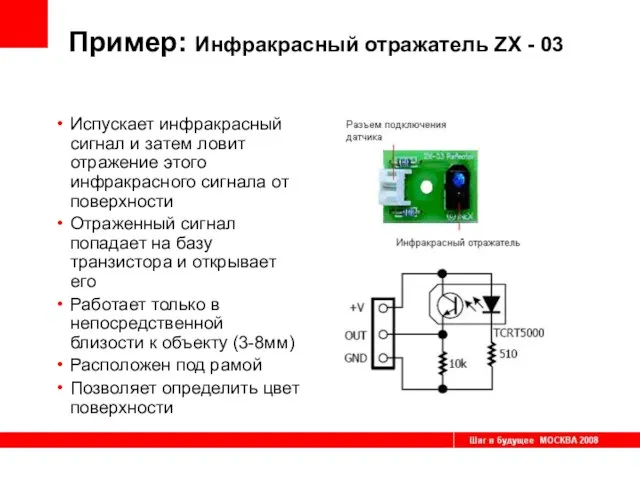
Слайд 6Пример: Инфракрасный отражатель ZX - 03
Испускает инфракрасный сигнал и затем ловит отражение
Пример: Инфракрасный отражатель ZX - 03
Испускает инфракрасный сигнал и затем ловит отражение
Слайд 7Программирование микроконтроллера
Программа чтения с датчиков и отображения на дисплей
Программа управления двигателями
Программа вывода
Программирование микроконтроллера
Программа чтения с датчиков и отображения на дисплей
Программа управления двигателями
Программа вывода

Слайд 8Способы навигации – преимущества и недостатки
Водитель-тренер
Дорого
Неточно
GPS-навигация
Дорого
Не действует в закрытых помещениях
Программа
Не точно
Рельсы
Прокладка рельс
Не
Способы навигации – преимущества и недостатки
Водитель-тренер
Дорого
Неточно
GPS-навигация
Дорого
Не действует в закрытых помещениях
Программа
Не точно
Рельсы
Прокладка рельс
Не

Слайд 9Методика исследования
Выбор цветов разметки
Анализ влияния внешних факторов:
Освещенность
Загрязненность
Тип поверхности
Создание образцов
Создание программы измерения
Методика исследования
Выбор цветов разметки
Анализ влияния внешних факторов:
Освещенность
Загрязненность
Тип поверхности
Создание образцов
Создание программы измерения

Слайд 10Выбор цветов разметки
Вначале 9 основных цветов при одинаковых условиях
Отличаются: Черный, Белый и
Выбор цветов разметки
Вначале 9 основных цветов при одинаковых условиях
Отличаются: Черный, Белый и

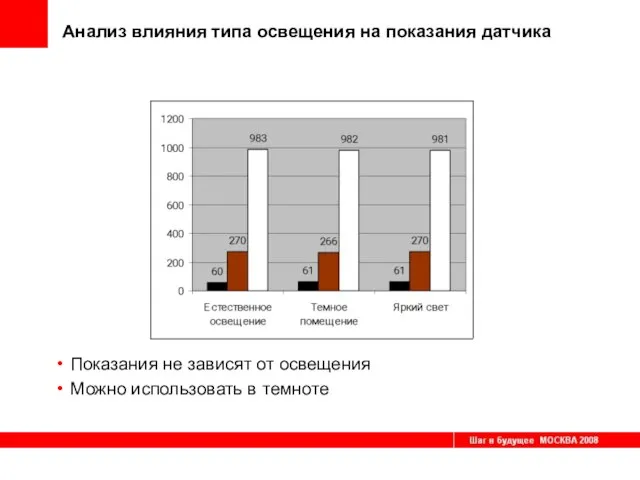
Слайд 11Анализ влияния типа освещения на показания датчика
Показания не зависят от освещения
Можно
Анализ влияния типа освещения на показания датчика
Показания не зависят от освещения
Можно
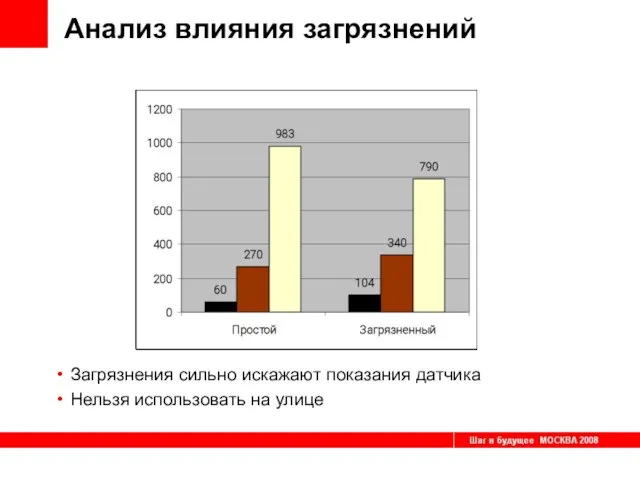
Слайд 12Анализ влияния загрязнений
Загрязнения сильно искажают показания датчика
Нельзя использовать на улице
Анализ влияния загрязнений
Загрязнения сильно искажают показания датчика
Нельзя использовать на улице
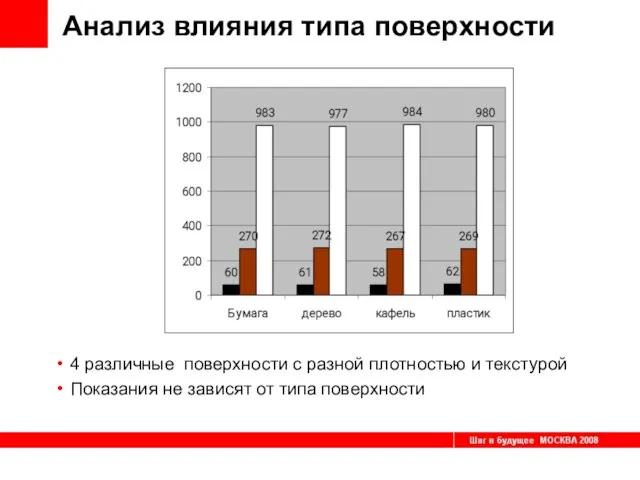
Слайд 13Анализ влияния типа поверхности
4 различные поверхности с разной плотностью и текстурой
Показания не
Анализ влияния типа поверхности
4 различные поверхности с разной плотностью и текстурой
Показания не
Слайд 14Результаты работы
Был создан СМА
Исследована архитектура, датчики и программирование СМА
Мехатронные устройства на базе
Результаты работы
Был создан СМА
Исследована архитектура, датчики и программирование СМА
Мехатронные устройства на базе
Слайд 15Демонстрация
Демонстрация

 Юридическое неокантианство. Р. Штаммлер
Юридическое неокантианство. Р. Штаммлер По следам прочитанного
По следам прочитанного Презентация на тему Театр и музыка Античности 10 класс
Презентация на тему Театр и музыка Античности 10 класс  Искусство мозаики
Искусство мозаики 20120620_ladozhskoe_ozero._valaam._rol_ozera_vo_vremya_vov
20120620_ladozhskoe_ozero._valaam._rol_ozera_vo_vremya_vov Психологическая культура личности и ее структура
Психологическая культура личности и ее структура Казань Ижевск Киров Йошкар-Ола Чебоксары Ульяновск Пенза Сызрань Сарапул Уфа Пермь Саратов Волгоград Оренбург Кузнецк Нефтекамск
Казань Ижевск Киров Йошкар-Ола Чебоксары Ульяновск Пенза Сызрань Сарапул Уфа Пермь Саратов Волгоград Оренбург Кузнецк Нефтекамск Лекция 5Хранение информации в памяти компьютера (продолжение)
Лекция 5Хранение информации в памяти компьютера (продолжение) Презентация на тему Арабская культура
Презентация на тему Арабская культура  Intel. Історія успіху
Intel. Історія успіху Презентация на тему Физиология эндокринной системы
Презентация на тему Физиология эндокринной системы  Алканы. Подготовка к ГИА
Алканы. Подготовка к ГИА Композиция Кем быть
Композиция Кем быть О РЕАЛИЗАЦИИ КОНЦЕПЦИИ СОЗДАНИЯ ОБРАЗОВАТЕЛЬНЫХ ОКРУГОВ НА ТЕРРИТОРИИ ЗАТО СЕВЕРСК НА ОСНОВЕ ОБЩЕСТВЕННО - АКТИВНЫХ ШКОЛ
О РЕАЛИЗАЦИИ КОНЦЕПЦИИ СОЗДАНИЯ ОБРАЗОВАТЕЛЬНЫХ ОКРУГОВ НА ТЕРРИТОРИИ ЗАТО СЕВЕРСК НА ОСНОВЕ ОБЩЕСТВЕННО - АКТИВНЫХ ШКОЛ Редколлегия Международного научного журнала «Альтернативная энергетика и экология» поздравляет Вас с Новым 2008 Годом!!!
Редколлегия Международного научного журнала «Альтернативная энергетика и экология» поздравляет Вас с Новым 2008 Годом!!! Операции на сосудах, нервах
Операции на сосудах, нервах Презентация на тему Ароматерапия
Презентация на тему Ароматерапия Спорт- тормышымның яшәү үрнәге
Спорт- тормышымның яшәү үрнәге c77ca4f77b2a5aa2_1
c77ca4f77b2a5aa2_1 Этико-эстетическая культура управления в органах внутренних дел. Культура руководителей внутренних дел
Этико-эстетическая культура управления в органах внутренних дел. Культура руководителей внутренних дел Логические операторы
Логические операторы Технология выполнения штукатурных работ Выполнил мастер п/о Гордеюк А.Л.
Технология выполнения штукатурных работ Выполнил мастер п/о Гордеюк А.Л. Г е о г р а ф и я культуры Формирование языков и их влияние на образование этносов и государств.
Г е о г р а ф и я культуры Формирование языков и их влияние на образование этносов и государств. Презентация на тему Вавилонский царь Хаммурапи и его законы
Презентация на тему Вавилонский царь Хаммурапи и его законы Сертификаты Фергана
Сертификаты Фергана РЕЧЕВЫЕ МАНИПУЛЯЦИИ
РЕЧЕВЫЕ МАНИПУЛЯЦИИ ПРАВДА ОВИЧ И СПИД
ПРАВДА ОВИЧ И СПИД Профессиональные компетенции специалистов по работе с клиентами
Профессиональные компетенции специалистов по работе с клиентами