- Система автоматичного керування САВ-1М

Содержание
- 2. САВ -1М – призначена для автоматичного керування самохідними збиральними машинами. Базова лінія системи – рядки кукурудзи.
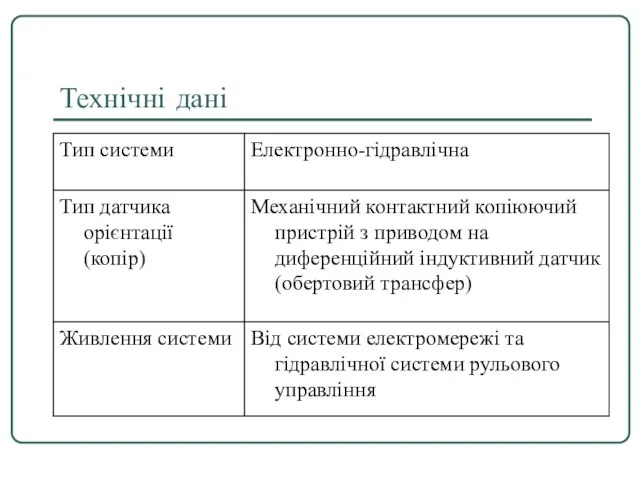
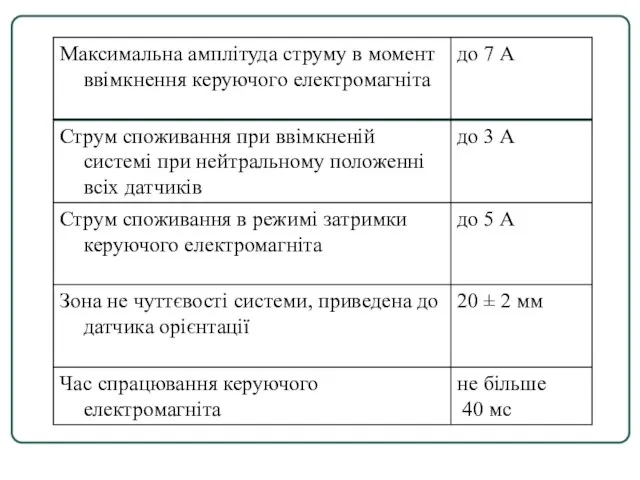
- 3. Технічні дані
- 5. Система дає можливість коректувати положення керуючих коліс машини по відношенню до рядків кукурудзи в залежності від
- 6. Принцип дії: При рухові самохідного комбайна по рядкам кукурудзи копіюючий пристрій системи рухається між рядками. У
- 7. Електричний сигнал по з’єднувальним кабелям поступає в електричний блок, де фільтрується і підсилюється. Підсилений сигнал в
- 8. Під дією гідроциліндра керуючі колеса комбайна повертаються і повертають машину в напрямку зменшення відхилення від рядків.
- 9. Поворот керуючих коліс триває доти, поки індуктивний датчик положення коліс (датчик зворотнього зв’язку, ротор якого зв’язаний
- 10. Поворот комбайна триває до тих пір, поки два копіюючи пристрої не повернуться в нейтральне положення –
- 11. Електронний блок розміщений в кабіні комбайна спереду з лівої сторони від водія. Він підсилює і фільтрує
- 12. На лицьову панель електронного блоку виведений ручний коректор, який призначений для настройки на постійний кут повороту
- 13. На лицьовій панелі блоку розміщені: перемикач для відімкнення до напруги живлення та світлодіод, який сигналізує про
- 14. Електрокерований трипозиційний гідророзподільник розташований на рамі комбайна під двигуном з правої сторони за напрямком руху. Він
- 15. Розподільник працює за такою схемою: коли його плунжер знаходиться в нейтральному положенні, то потік масла, який
- 16. При ввімкненні одного з електромаг-нітів його якір пересувається і через штовхач пересуває в крайнє положен-ня плунжер
- 17. Електрокерований двопозиційний гідророзподільник розташований на рамі комбайна з правої сторони. Призначений розділяти вихідні канали рульової гідросистеми
- 18. В положенні «ВИКЛ» розподільник з’єднує гідро циліндр і розподільник рульової гідросистеми. В положенні «ВКЛ» цей зв’язок
- 19. Індуктивні датчики. В системі є три датчика: два для копіру вального пристрою і один для управляючих
- 20. Датчик положення керуючих коліс комбайна змонтований за допомогою консолі на мосту керуючих коліс. Вісь ротора з’єднана
- 21. Підготовка до роботи Встановити комбайн на горизонтальну поверхню. Встановити керуючі колеса комбайна в нейтральне положення. Перевірити
- 22. Перевірити точну орієнтацію рамок копіюючи пристроїв в нейтральному положенні: вручну переміщати рамку вліво чи вправо. Рамка
- 23. Перевірити натяг з’єднувального тросика. При повороті рамки біля нейтрального положення натяг двох половинок тросиків не повинен
- 24. Встановити номінальні оберти двигуна. Ввімкнути тумблер на лицьовій панелі блоку, при цьому повинен засвітитись світло діод
- 25. Повернути коректор на невеликий кут вліво аюо вправо. При цьому амперметр буде показувати струм 2-4 А.
- 26. Перевірку зони не чуттєвості рекомендується робити при заглушеному двигуні. Перед зупинкою двигуна необхідно перевести ручний коректор
- 27. Порядок роботи Система САВ-1М призначена для використання при рухові комбайна. Система вмикається на початку робочого ходу
- 28. Не зупиняючи комбайн ввімкнути тумблер на лицьовій панелі, в результаті чого вимикається руль і його повертання
- 29. В кінці рядка, перед тим, як комбайн потрібно повернути,, необхідно вимкнути систему. Одночасно вмикається рульове управління.
- 30. Характерні несправності САВ-1М При ввімкненні система не працює, індикатор живлення не світиться: а) немає контакту в
- 31. При ввімкненні системи світлодіод світиться, а поворот копіру і поворот ручного коректора не приводить в рух
- 32. Якщо амперметр не показує струму при вищесказаній несправності: а) відсутній електричний контакт штепсельному роз’ємі самого гідро
- 33. При незначному пересуванні рамок копіруючого пристрою або ручкою коректора керуючі колеса повертаються до упору (потенціометри корегування
- 34. 5. При переміщенні рамок контурів не повертаються керуючі колеса, а вико-нується поворот тільки від «ручного» коректора:
- 35. Після кожної несправності потрібно перевірити працездатність блоку шляхом перевірки тестером на 12-ти штирьовому роз’ємі напруги: між
- 37. Скачать презентацию
Слайд 2САВ -1М – призначена для автоматичного керування самохідними збиральними машинами.
Базова лінія
САВ -1М – призначена для автоматичного керування самохідними збиральними машинами. Базова лінія
Слайд 3Технічні дані
Технічні дані
Слайд 5Система дає можливість коректувати положення керуючих коліс машини по відношенню до рядків
Система дає можливість коректувати положення керуючих коліс машини по відношенню до рядків
Слайд 6Принцип дії:
При рухові самохідного комбайна по рядкам кукурудзи копіюючий пристрій
Принцип дії:
При рухові самохідного комбайна по рядкам кукурудзи копіюючий пристрій
Слайд 7 Електричний сигнал по з’єднувальним кабелям поступає в електричний блок, де фільтрується
Електричний сигнал по з’єднувальним кабелям поступає в електричний блок, де фільтрується
Слайд 8 Під дією гідроциліндра керуючі колеса комбайна повертаються і повертають машину в
Під дією гідроциліндра керуючі колеса комбайна повертаються і повертають машину в
Слайд 9 Поворот керуючих коліс триває доти, поки індуктивний датчик положення коліс (датчик
Поворот керуючих коліс триває доти, поки індуктивний датчик положення коліс (датчик
Слайд 10Поворот комбайна триває до тих пір, поки два копіюючи пристрої не повернуться
Поворот комбайна триває до тих пір, поки два копіюючи пристрої не повернуться
Слайд 11Електронний блок розміщений в кабіні комбайна спереду з лівої сторони від водія.
Електронний блок розміщений в кабіні комбайна спереду з лівої сторони від водія.
Слайд 12На лицьову панель електронного блоку виведений ручний коректор, який призначений для настройки
На лицьову панель електронного блоку виведений ручний коректор, який призначений для настройки
Слайд 13На лицьовій панелі блоку розміщені: перемикач для відімкнення до напруги живлення та
На лицьовій панелі блоку розміщені: перемикач для відімкнення до напруги живлення та
Слайд 14Електрокерований трипозиційний гідророзподільник розташований на рамі комбайна під двигуном з правої сторони
Електрокерований трипозиційний гідророзподільник розташований на рамі комбайна під двигуном з правої сторони
Слайд 15Розподільник працює за такою схемою: коли його плунжер знаходиться в нейтральному положенні,
Розподільник працює за такою схемою: коли його плунжер знаходиться в нейтральному положенні,
Слайд 16При ввімкненні одного з електромаг-нітів його якір пересувається і через штовхач пересуває
При ввімкненні одного з електромаг-нітів його якір пересувається і через штовхач пересуває
Слайд 17Електрокерований двопозиційний гідророзподільник розташований на рамі комбайна з правої сторони. Призначений розділяти
Електрокерований двопозиційний гідророзподільник розташований на рамі комбайна з правої сторони. Призначений розділяти
Слайд 18В положенні «ВИКЛ» розподільник з’єднує гідро циліндр і розподільник рульової гідросистеми. В
В положенні «ВИКЛ» розподільник з’єднує гідро циліндр і розподільник рульової гідросистеми. В
Слайд 19Індуктивні датчики. В системі є три датчика: два для копіру вального пристрою
Індуктивні датчики. В системі є три датчика: два для копіру вального пристрою
Слайд 20Датчик положення керуючих коліс комбайна змонтований за допомогою консолі на мосту керуючих
Датчик положення керуючих коліс комбайна змонтований за допомогою консолі на мосту керуючих
Слайд 21Підготовка до роботи
Встановити комбайн на горизонтальну поверхню.
Встановити керуючі колеса комбайна в нейтральне
Підготовка до роботи
Встановити комбайн на горизонтальну поверхню.
Встановити керуючі колеса комбайна в нейтральне
Слайд 22Перевірити точну орієнтацію рамок копіюючи пристроїв в нейтральному положенні: вручну переміщати рамку
Перевірити точну орієнтацію рамок копіюючи пристроїв в нейтральному положенні: вручну переміщати рамку
Слайд 23Перевірити натяг з’єднувального тросика. При повороті рамки біля нейтрального положення натяг двох
Перевірити натяг з’єднувального тросика. При повороті рамки біля нейтрального положення натяг двох
Слайд 24Встановити номінальні оберти двигуна.
Ввімкнути тумблер на лицьовій панелі блоку, при цьому повинен
Встановити номінальні оберти двигуна.
Ввімкнути тумблер на лицьовій панелі блоку, при цьому повинен
Слайд 25Повернути коректор на невеликий кут вліво аюо вправо. При цьому амперметр буде
Повернути коректор на невеликий кут вліво аюо вправо. При цьому амперметр буде
Слайд 26Перевірку зони не чуттєвості рекомендується робити при заглушеному двигуні. Перед зупинкою двигуна
Перевірку зони не чуттєвості рекомендується робити при заглушеному двигуні. Перед зупинкою двигуна
Слайд 27Порядок роботи
Система САВ-1М призначена для використання при рухові комбайна. Система вмикається на
Порядок роботи
Система САВ-1М призначена для використання при рухові комбайна. Система вмикається на
Слайд 28Не зупиняючи комбайн ввімкнути тумблер на лицьовій панелі, в результаті чого вимикається
Не зупиняючи комбайн ввімкнути тумблер на лицьовій панелі, в результаті чого вимикається
Слайд 29В кінці рядка, перед тим, як комбайн потрібно повернути,, необхідно вимкнути систему.
В кінці рядка, перед тим, як комбайн потрібно повернути,, необхідно вимкнути систему.
Слайд 30Характерні несправності
САВ-1М
При ввімкненні система не працює, індикатор живлення не світиться:
а) немає
Характерні несправності
САВ-1М
При ввімкненні система не працює, індикатор живлення не світиться:
а) немає
Слайд 31При ввімкненні системи світлодіод світиться, а поворот копіру і поворот ручного коректора
При ввімкненні системи світлодіод світиться, а поворот копіру і поворот ручного коректора
Слайд 32Якщо амперметр не показує струму при вищесказаній несправності:
а) відсутній електричний контакт
Якщо амперметр не показує струму при вищесказаній несправності:
а) відсутній електричний контакт
Слайд 33При незначному пересуванні рамок копіруючого пристрою або ручкою коректора керуючі колеса повертаються
При незначному пересуванні рамок копіруючого пристрою або ручкою коректора керуючі колеса повертаються
Слайд 345. При переміщенні рамок контурів не повертаються керуючі колеса, а вико-нується поворот
5. При переміщенні рамок контурів не повертаються керуючі колеса, а вико-нується поворот
Слайд 35Після кожної несправності потрібно перевірити працездатність блоку шляхом перевірки тестером на 12-ти
Після кожної несправності потрібно перевірити працездатність блоку шляхом перевірки тестером на 12-ти
 КОЛЛЕКЦИЯ АРОМАТОВ ДЛЯ ГЕЛЕЙ ДЛЯ ДУША И ПЕНЫ ДЛЯ ВАНН Изысканные,тонизирующие и опьяняющие ароматы с запахом наших любимых напитк
КОЛЛЕКЦИЯ АРОМАТОВ ДЛЯ ГЕЛЕЙ ДЛЯ ДУША И ПЕНЫ ДЛЯ ВАНН Изысканные,тонизирующие и опьяняющие ароматы с запахом наших любимых напитк Медуза Горгона: несчастная жертва или жестокое чудовище?
Медуза Горгона: несчастная жертва или жестокое чудовище? Процесс принятия и реализации управленческих решений
Процесс принятия и реализации управленческих решений Сетевые структуры в современной мировой политике
Сетевые структуры в современной мировой политике Конструктивный рисунок с натуры
Конструктивный рисунок с натуры Тематическое и поурочное планирование курса «ОРКиСЭ»
Тематическое и поурочное планирование курса «ОРКиСЭ» Доклад на тему Белл-ланкастерская система обучения
Доклад на тему Белл-ланкастерская система обучения ? Всем привет! ?меня зовут Надеждав 17:00(по Москве) начнём!В11: Стереометрия
? Всем привет! ?меня зовут Надеждав 17:00(по Москве) начнём!В11: Стереометрия Факультет Международного туризма
Факультет Международного туризма 1 Тестирование производительности веб–приложений: Как перестать беспокоиться и начать делать ЭТО Тимур Хайруллин Организатор.
1 Тестирование производительности веб–приложений: Как перестать беспокоиться и начать делать ЭТО Тимур Хайруллин Организатор. ДОПОЛНИТЕЛЬНОЕ ОБРАЗОВАНИЕ В ШКОЛЕ
ДОПОЛНИТЕЛЬНОЕ ОБРАЗОВАНИЕ В ШКОЛЕ САМОУПРАВЛЕНИЕ ОБУЧАЮЩИХСЯ
САМОУПРАВЛЕНИЕ ОБУЧАЮЩИХСЯ Встраиваемая бытовая техника
Встраиваемая бытовая техника Ёкаи в Японии
Ёкаи в Японии Антропогенное воздействие на литосферу
Антропогенное воздействие на литосферу Основные сценарии использования мобильных платформ для работы с системами электронного документооборота: проблемы и поиск пут
Основные сценарии использования мобильных платформ для работы с системами электронного документооборота: проблемы и поиск пут Презентация по теме: Химические реакции
Презентация по теме: Химические реакции Смешанные колориты
Смешанные колориты Презентация к уроку английского языка в 10 классе
Презентация к уроку английского языка в 10 классе 20161215_21.12.16.prezent_k_seminaru_geografii_0
20161215_21.12.16.prezent_k_seminaru_geografii_0 Юбилею М.В.Ломоносова посвящается …
Юбилею М.В.Ломоносова посвящается … Гиперактивный ребёнок в школе
Гиперактивный ребёнок в школе Открытый урок математики в 5 классе
Открытый урок математики в 5 классе Презентация на тему Общее знакомство с растениями Мир растений
Презентация на тему Общее знакомство с растениями Мир растений Процессуальные решения и документы, сроки и судебные издержки. Гражданский иск в уголовном процессе
Процессуальные решения и документы, сроки и судебные издержки. Гражданский иск в уголовном процессе Анализ основ рекламной деятельности бренда “BMW M5”
Анализ основ рекламной деятельности бренда “BMW M5” es-Persona индивидуальные заказы
es-Persona индивидуальные заказы +
+