- СистемаОбработки Телевизионной Информации

Содержание
- 2. Задачи системы Локальная навигация подводного аппарата в придонном режиме плавания Режим динамического позиционирования подводного аппарата возле
- 3. Состав системы Забортная часть (видеодатчик – система освещения + две видеокамеры) Блок компьютерной обработки обработка информации
- 4. Алгоритм Локальной Навигации Определение параметров движения подводного аппарата – координат аппарата (в связанной и полигонных системах
- 5. Метод оптического потока В основе лежит предположение о постоянстве яркости любого пиксела изображения: Изначально показал себя
- 6. Функционал схожести Исходное изображение разбивается на квадратные области – ячейки размером csizexcsize Если перемещения нет, функционал
- 7. Алгоритм определения максимума функционала схожести 1) Определяется точка начального приближения координаты вершины конуса 2) Производится вычисление
- 8. Восстановление параметров движения СГА по перемещениям кадров Определение дальности по стереоканалу Определение перемещения на основе
- 9. Алгоритм определения комингс - площадки Цель – автоматическая пристыковка к люку Изначально изображение бинаризуется Затем находятся
- 10. Освещение грунта В ходе работы были испытаны светодиодные и галогенные источники освещения Сравнивалась дымка обратного рассеяния
- 11. Калибровка стереопары Устранение дисторсии Устранение несоосностей камер
- 13. Скачать презентацию
Слайд 2Задачи системы
Локальная навигация подводного аппарата в придонном режиме плавания
Режим динамического позиционирования подводного
Задачи системы
Локальная навигация подводного аппарата в придонном режиме плавания
Режим динамического позиционирования подводного
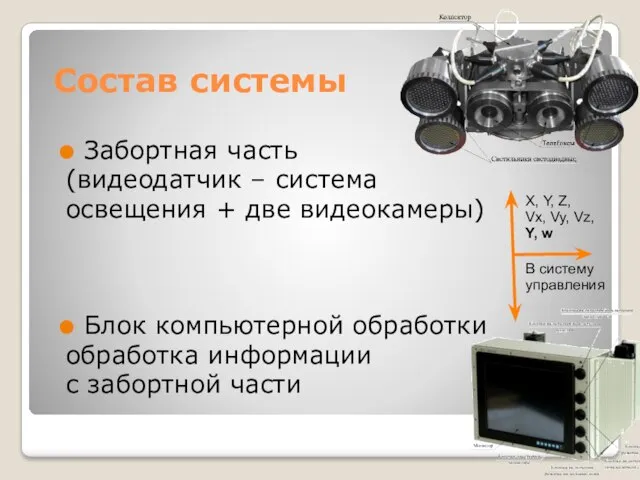
Слайд 3Состав системы
Забортная часть
(видеодатчик – система
освещения + две видеокамеры)
Блок компьютерной обработки
обработка информации
Состав системы
Забортная часть
(видеодатчик – система
освещения + две видеокамеры)
Блок компьютерной обработки
обработка информации
Слайд 4Алгоритм Локальной Навигации
Определение параметров движения подводного аппарата – координат аппарата (в связанной
Алгоритм Локальной Навигации
Определение параметров движения подводного аппарата – координат аппарата (в связанной
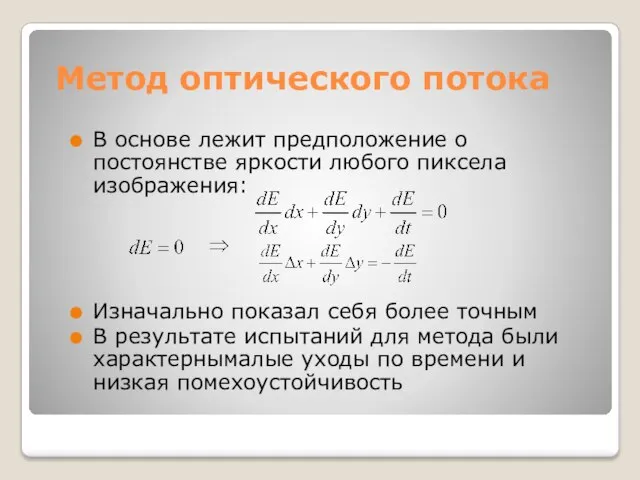
Слайд 5Метод оптического потока
В основе лежит предположение о постоянстве яркости любого пиксела изображения:
Изначально
Метод оптического потока
В основе лежит предположение о постоянстве яркости любого пиксела изображения:
Изначально
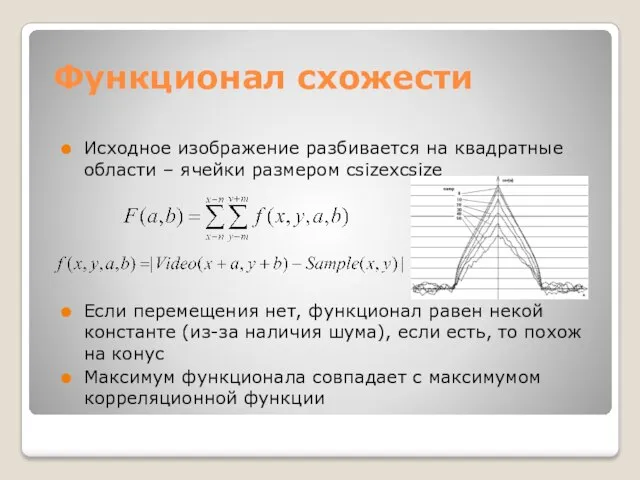
Слайд 6Функционал схожести
Исходное изображение разбивается на квадратные области – ячейки размером csizexcsize
Если перемещения
Функционал схожести
Исходное изображение разбивается на квадратные области – ячейки размером csizexcsize
Если перемещения
Слайд 7Алгоритм определения максимума функционала схожести
1) Определяется точка начального приближения координаты вершины конуса
2)
Алгоритм определения максимума функционала схожести
1) Определяется точка начального приближения координаты вершины конуса
2)
Слайд 8Восстановление параметров движения СГА по перемещениям кадров
Определение дальности по стереоканалу
Определение перемещения на
Восстановление параметров движения СГА по перемещениям кадров
Определение дальности по стереоканалу
Определение перемещения на
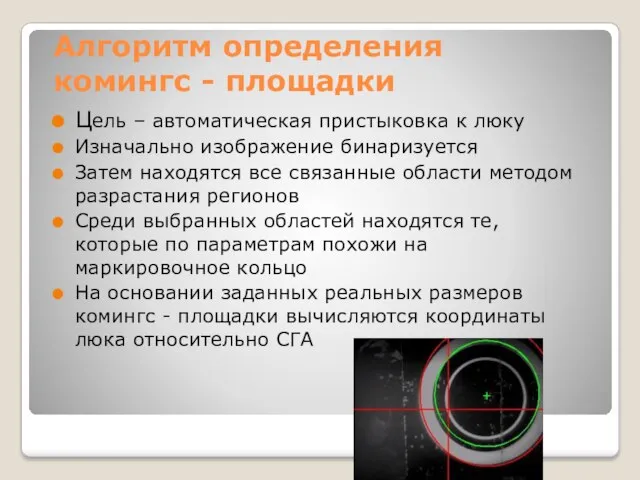
Слайд 9Алгоритм определения комингс - площадки
Цель – автоматическая пристыковка к люку
Изначально изображение бинаризуется
Затем
Алгоритм определения комингс - площадки
Цель – автоматическая пристыковка к люку
Изначально изображение бинаризуется
Затем
Слайд 10Освещение грунта
В ходе работы были испытаны светодиодные и галогенные источники освещения
Сравнивалась дымка
Освещение грунта
В ходе работы были испытаны светодиодные и галогенные источники освещения
Сравнивалась дымка
Слайд 11Калибровка стереопары
Устранение дисторсии
Устранение несоосностей камер
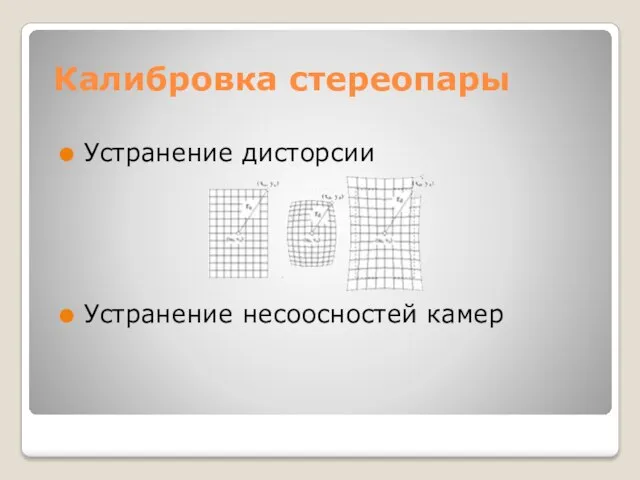
Калибровка стереопары
Устранение дисторсии
Устранение несоосностей камер
 События в мире и в Беларуси
События в мире и в Беларуси Тренинг. Суперэнергетика 2.0
Тренинг. Суперэнергетика 2.0 Анализ реестра значимых программ в Навигаторе дополнительного образования детей Кузбасса
Анализ реестра значимых программ в Навигаторе дополнительного образования детей Кузбасса Основные идеи Федерального государственного образовательного стандарта второго поколения на III ступени обучения в сельской шко
Основные идеи Федерального государственного образовательного стандарта второго поколения на III ступени обучения в сельской шко Презентация на тему Системы счисления. Систематизация материала и подготовка к ЕГЭ
Презентация на тему Системы счисления. Систематизация материала и подготовка к ЕГЭ Я и мой ребёнок
Я и мой ребёнок Направляя Планирование семьи и Репродуктивные права для спасения жизни женщин
Направляя Планирование семьи и Репродуктивные права для спасения жизни женщин Гениальность По Заказу – Управление Творческими Процессами
Гениальность По Заказу – Управление Творческими Процессами Фасадные материалы
Фасадные материалы Проект информатизации образовательного учреждения
Проект информатизации образовательного учреждения Пойте вместе с нами. Шпаргалка для родителей
Пойте вместе с нами. Шпаргалка для родителей Электромагнит, электронное реле и герконы
Электромагнит, электронное реле и герконы Базовые аспекты и алгоритмы разработки е-курсов Ту ли потребность удовлетворяет электронный обучающий продукт? Что обеспечивае
Базовые аспекты и алгоритмы разработки е-курсов Ту ли потребность удовлетворяет электронный обучающий продукт? Что обеспечивае Виды грибов (1 класс)
Виды грибов (1 класс) Лёгкая атлетика
Лёгкая атлетика День матери
День матери Основные и составные цвета
Основные и составные цвета Сварочный пост и инструмент для сварщика
Сварочный пост и инструмент для сварщика Классификация повреждений деревянных строительных конструкций
Классификация повреждений деревянных строительных конструкций Научные статьи
Научные статьи Технология обработки конструкционных материалов резанием
Технология обработки конструкционных материалов резанием  Легенды
Легенды Нижний Тагил. Спутник
Нижний Тагил. Спутник Рекламная кампания
Рекламная кампания План по продвижению магазина
План по продвижению магазина Хрестики-нулики
Хрестики-нулики Практические решения развития услуг цифрового ТВ в кабельных сетях. Продвижение продукта и коммуникация с клиентом. Опыт лидера р
Практические решения развития услуг цифрового ТВ в кабельных сетях. Продвижение продукта и коммуникация с клиентом. Опыт лидера р Презентация на тему Михаил Михайлович Сперанский
Презентация на тему Михаил Михайлович Сперанский