- Слежение за задержкой импульсного сигнала

Содержание
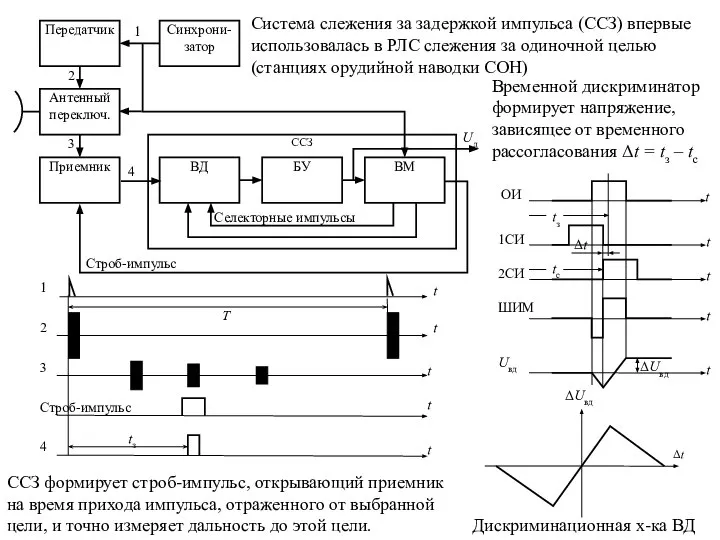
- 2. ССЗ формирует строб-импульс, открывающий приемник на время прихода импульса, отраженного от выбранной цели, и точно измеряет
- 3. В РЛС обнаружения и многофункциональных РЛС часто производится сопровождение многих целей (сопровождение на проходе) и сопровождение
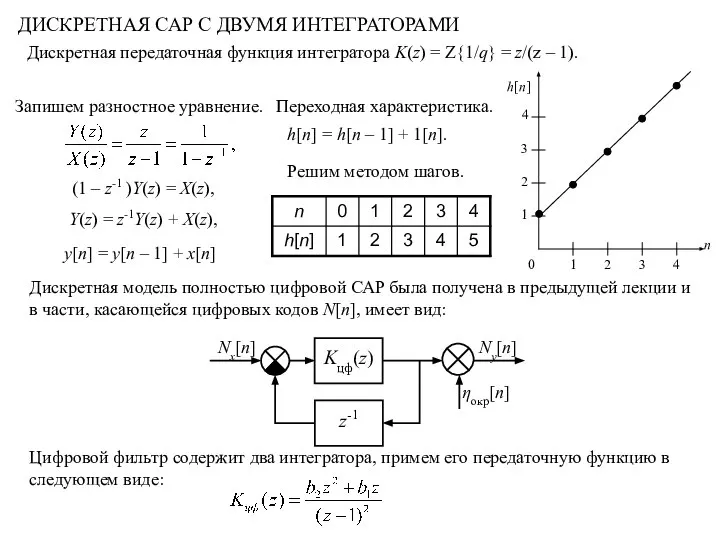
- 4. ДИСКРЕТНАЯ САР С ДВУМЯ ИНТЕГРАТОРАМИ Дискретная передаточная функция интегратора K(z) = Z{1/q} = z/(z – 1).
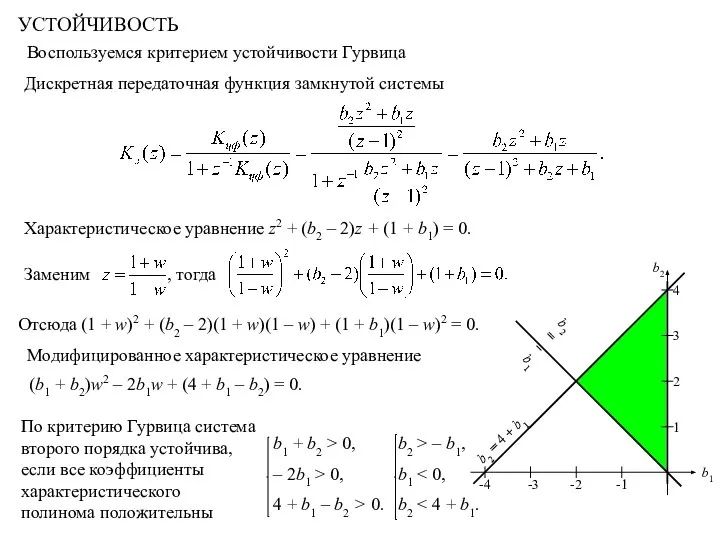
- 5. УСТОЙЧИВОСТЬ Воспользуемся критерием устойчивости Гурвица Дискретная передаточная функция замкнутой системы Характеристическое уравнение z2 + (b2 –
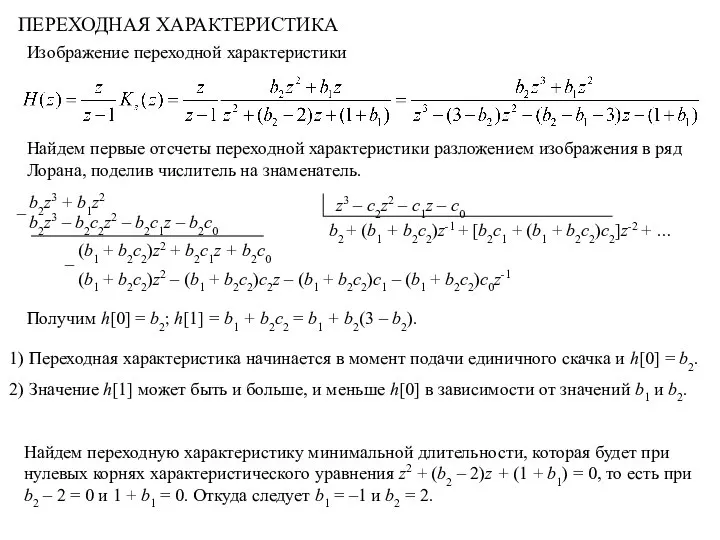
- 6. ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА Изображение переходной характеристики Найдем первые отсчеты переходной характеристики разложением изображения в ряд Лорана, поделив
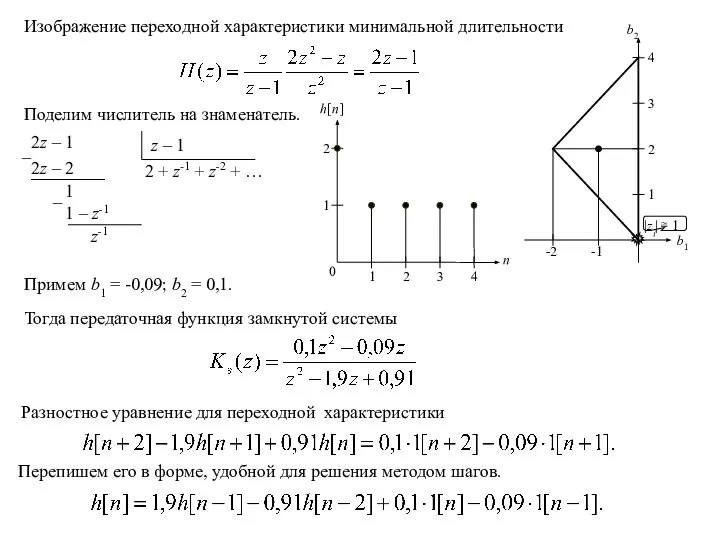
- 7. Изображение переходной характеристики минимальной длительности Поделим числитель на знаменатель. Примем b1 = -0,09; b2 = 0,1.
- 9. Скачать презентацию
Слайд 2ССЗ формирует строб-импульс, открывающий приемник на время прихода импульса, отраженного от выбранной
ССЗ формирует строб-импульс, открывающий приемник на время прихода импульса, отраженного от выбранной
Слайд 3В РЛС обнаружения и многофункциональных РЛС часто производится сопровождение многих целей (сопровождение
В РЛС обнаружения и многофункциональных РЛС часто производится сопровождение многих целей (сопровождение

Слайд 4ДИСКРЕТНАЯ САР С ДВУМЯ ИНТЕГРАТОРАМИ
Дискретная передаточная функция интегратора K(z) = Z{1/q} =
ДИСКРЕТНАЯ САР С ДВУМЯ ИНТЕГРАТОРАМИ
Дискретная передаточная функция интегратора K(z) = Z{1/q} =
Слайд 5УСТОЙЧИВОСТЬ
Воспользуемся критерием устойчивости Гурвица
Дискретная передаточная функция замкнутой системы
Характеристическое уравнение z2
УСТОЙЧИВОСТЬ
Воспользуемся критерием устойчивости Гурвица
Дискретная передаточная функция замкнутой системы
Характеристическое уравнение z2
Слайд 6ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА
Изображение переходной характеристики
Найдем первые отсчеты переходной характеристики разложением изображения в ряд
ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА
Изображение переходной характеристики
Найдем первые отсчеты переходной характеристики разложением изображения в ряд
Слайд 7Изображение переходной характеристики минимальной длительности
Поделим числитель на знаменатель.
Примем b1 = -0,09; b2
Изображение переходной характеристики минимальной длительности
Поделим числитель на знаменатель.
Примем b1 = -0,09; b2
 Нематериальные активы организации
Нематериальные активы организации Министерство природных ресурсов Пермского края О ходе реализации Закона Пермского края от 28.12.2007 № 177-ПК «О краевой целевой прогр
Министерство природных ресурсов Пермского края О ходе реализации Закона Пермского края от 28.12.2007 № 177-ПК «О краевой целевой прогр размещение рекламы на:1+1ТЕТ РТР-ПланетаКино24 канал
размещение рекламы на:1+1ТЕТ РТР-ПланетаКино24 канал Ну, погоди!
Ну, погоди! Стратегическая бизнес-игра Мегаполис
Стратегическая бизнес-игра Мегаполис ПОРЯДОК ПОДАЧИ АПЕЛЛЯЦИИ
ПОРЯДОК ПОДАЧИ АПЕЛЛЯЦИИ Рубежный контроль № 3. Модуль III. Раздел Архитектура Испании, Португалии и заморских колонний
Рубежный контроль № 3. Модуль III. Раздел Архитектура Испании, Португалии и заморских колонний Тема: Была ли Тасеевская республика властью?
Тема: Была ли Тасеевская республика властью? Наша школа впервые распахнула двери 1 сентября 1952 года. В течение многих лет директорами школы работали А. Н. Серов и Е. Н. Золотов
Наша школа впервые распахнула двери 1 сентября 1952 года. В течение многих лет директорами школы работали А. Н. Серов и Е. Н. Золотов Сетевая плата
Сетевая плата Нестандартные технологии для поиска талантов
Нестандартные технологии для поиска талантов Устройство ПК…
Устройство ПК… ОРГАНИЗАЦИЯ ПРОЕКТНОЙ ДЕЯТЕЛЬНОСТИ
ОРГАНИЗАЦИЯ ПРОЕКТНОЙ ДЕЯТЕЛЬНОСТИ Особенности финансов НКО
Особенности финансов НКО ПРЕЗЕНТАЦИЯ КОМПАНИИ
ПРЕЗЕНТАЦИЯ КОМПАНИИ Детский общественный совет при Уполномоченном по правам ребёнка в Республике Бурятия
Детский общественный совет при Уполномоченном по правам ребёнка в Республике Бурятия Ассортиментный перечень
Ассортиментный перечень Презентация на тему Многообразие водорослей их роль в природе практическое значение
Презентация на тему Многообразие водорослей их роль в природе практическое значение  Брейн-ринг для 11 класса
Брейн-ринг для 11 класса Образование в Удмуртии В конце xix – начале xx вв
Образование в Удмуртии В конце xix – начале xx вв Общая информация о Банковской Группе «Мой Банк»
Общая информация о Банковской Группе «Мой Банк» турция
турция The software tools for
The software tools for Младший подростковый возраст, 9-12 лет
Младший подростковый возраст, 9-12 лет Химическое оружие
Химическое оружие Особенности формата Интернет-олимпиады
Особенности формата Интернет-олимпиады Формирование исполнительского мастерства в условиях образовательной среды в ДШИ
Формирование исполнительского мастерства в условиях образовательной среды в ДШИ Языковая школа
Языковая школа