- Создание антропоморфного манипулятора руки, управляемого от биопотенциалов тела

Содержание
- 2. План выступления Обзор: Антропоморфные манипуляторы и их системы управления Предлагаемые решения и уровень разработок: Цели проекта,
- 3. Антропоморфные манипуляторы и биопротезы с захватывающим устройством Примеры антропоморфных манипуляторов (далее – АМ) Примеры биопротезов Примеры
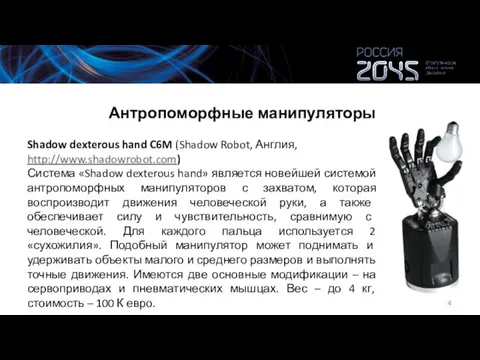
- 4. Антропоморфные манипуляторы Shadow dexterous hand C6M (Shadow Robot, Англия, http://www.shadowrobot.com) Система «Shadow dexterous hand» является новейшей
- 5. Shadow dexterous hand C6M
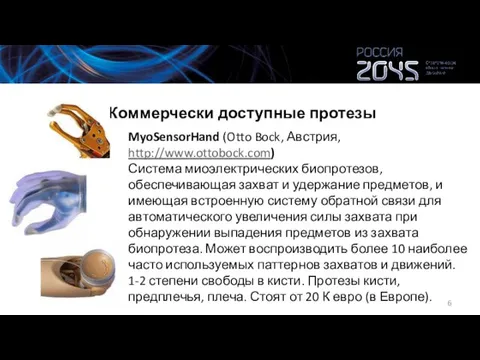
- 6. Коммерчески доступные протезы MyoSensorHand (Otto Bock, Австрия, http://www.ottobock.com) Система миоэлектрических биопротезов, обеспечивающая захват и удержание предметов,
- 7. Протезы - MyoSensorHand, i-LIMB Инструкция 1 Инструкция 2 Инструкция i-LIMB
- 8. Пневмо-протезы (видео 2004 года)
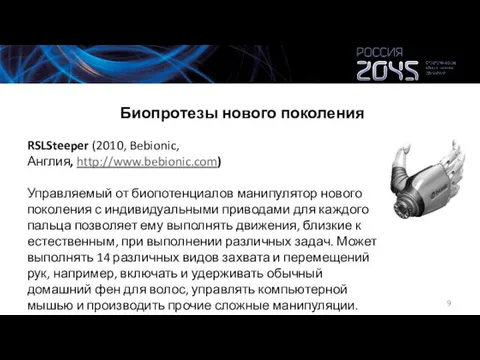
- 9. Биопротезы нового поколения RSLSteeper (2010, Bebionic, Англия, http://www.bebionic.com) Управляемый от биопотенциалов манипулятор нового поколения с индивидуальными
- 10. Механический тип управления
- 11. От перчаток виртуальной реальности
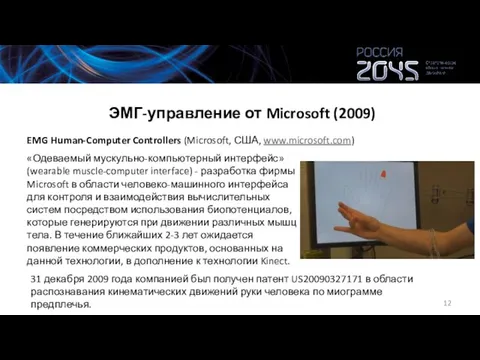
- 12. ЭМГ-управление от Microsoft (2009) «Одеваемый мускульно-компьютерный интерфейс» (wearable muscle-computer interface) - разработка фирмы Microsoft в области
- 13. ЭМГ-управление от Microsoft – новый тип HCI
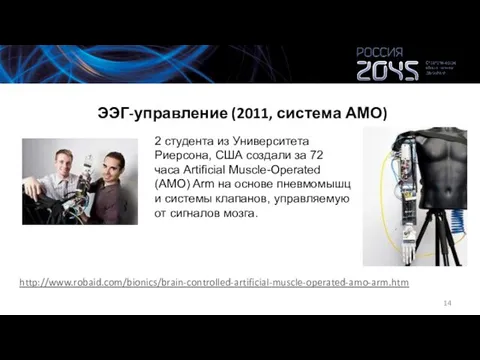
- 14. ЭЭГ-управление (2011, система АМО) http://www.robaid.com/bionics/brain-controlled-artificial-muscle-operated-amo-arm.htm 2 студента из Университета Риерсона, США создали за 72 часа Artificial
- 15. Вопросы: Можем ли мы воспроизвести подобные технологии? Какие ресурсы и сколько времени нужно для этого? Как
- 16. Цели проекта, требуемые ресурсы и технологии Разработка алгоритмов и технологической основы системы управления (СУ) антропоморфными манипуляторами
- 17. Основные задачи проекта Создать манипулятор и его привод с индивидуальным контролем движений пальцев. Выделить из регистрируемых
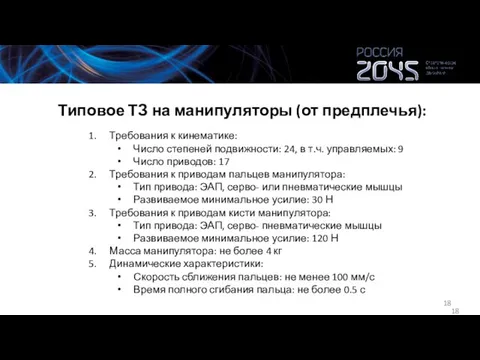
- 18. Типовое ТЗ на манипуляторы (от предплечья): Требования к кинематике: Число степеней подвижности: 24, в т.ч. управляемых:
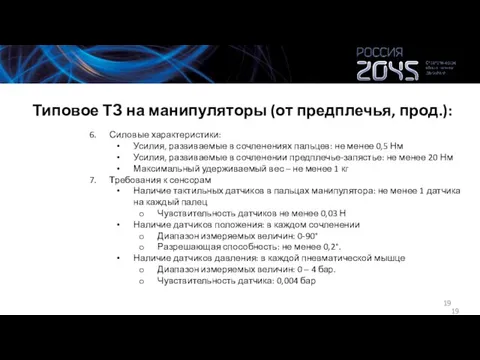
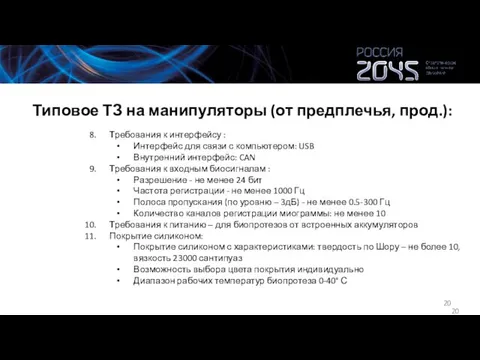
- 19. Типовое ТЗ на манипуляторы (от предплечья, прод.): Силовые характеристики: Усилия, развиваемые в сочленениях пальцев: не менее
- 20. Типовое ТЗ на манипуляторы (от предплечья, прод.): Требования к интерфейсу : Интерфейс для связи с компьютером:
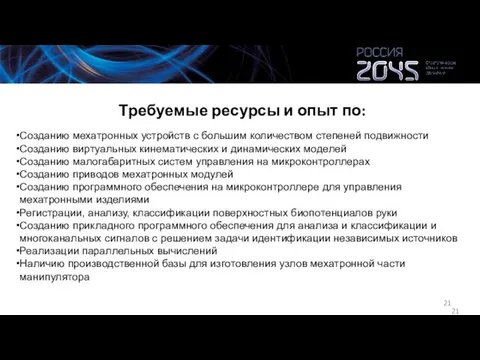
- 21. Требуемые ресурсы и опыт по: Созданию мехатронных устройств с большим количеством степеней подвижности Созданию виртуальных кинематических
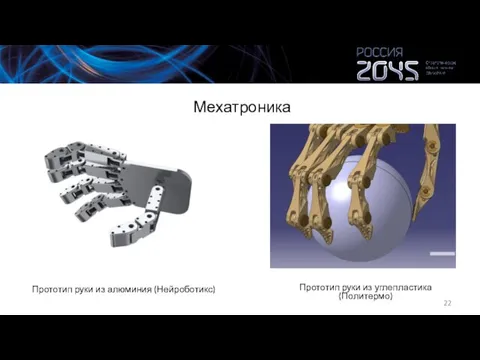
- 22. Мехатроника Прототип руки из алюминия (Нейроботикс) Прототип руки из углепластика (Политермо)
- 23. Типовые паттерны захвата (часть 1: 7 из 14) Захват тремя пальцами Силовой захват четырьмя пальцами ладони
- 24. Типовые паттерны захвата (часть 2): Аккуратный открытый захват большим и указательным пальцами Аккуратный закрытый захват большим
- 25. Типовые паттерны захвата (часть 3 – пример №1): Захват тремя пальцами Трехпалый захват должен осуществляться посредством
- 26. Типовые паттерны захвата (часть 3 – пример №2): Силовой захват четырьмя пальцами ладони и противопоставленного им
- 27. Типовые паттерны захвата (часть 3 – пример №3): Захват компьютерной мыши При данном типе захвата большой
- 28. Типовые паттерны захвата (часть 3 – пример №3): Захват компьютерной мыши При данном типе захвата большой
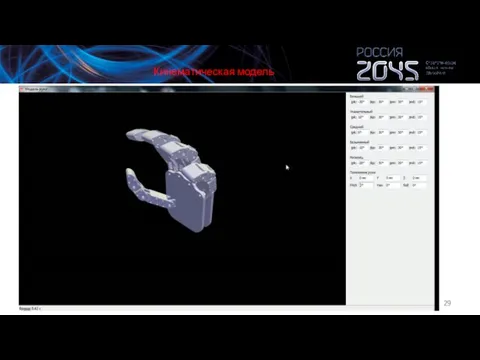
- 29. Кинематическая модель
- 30. Приводы на серводвигателях
- 31. Приводы на пневмо-мышцах Видео №1 Видео №2 Видео №1 Видео №2
- 32. Регистрация биопотенциалов Количество каналов – от 52 до 160 Частота опроса – до 2000 Гц/канал Регистрация
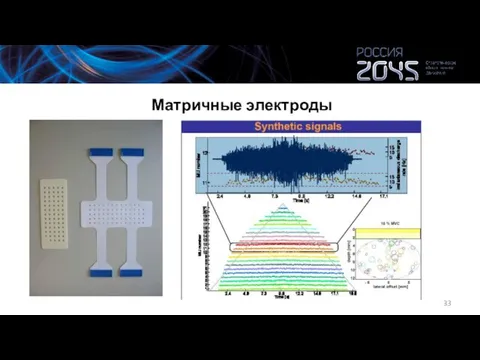
- 33. Матричные электроды
- 35. Скачать презентацию
Слайд 2План выступления
Обзор: Антропоморфные манипуляторы и их системы управления
Предлагаемые решения и уровень разработок:
Цели
План выступления
Обзор: Антропоморфные манипуляторы и их системы управления
Предлагаемые решения и уровень разработок:
Цели
Слайд 3Антропоморфные манипуляторы и биопротезы с захватывающим устройством
Примеры антропоморфных манипуляторов (далее –
Антропоморфные манипуляторы и биопротезы с захватывающим устройством
Примеры антропоморфных манипуляторов (далее –
Слайд 4Антропоморфные манипуляторы
Shadow dexterous hand C6M (Shadow Robot, Англия, http://www.shadowrobot.com)
Система «Shadow dexterous hand»
Антропоморфные манипуляторы
Shadow dexterous hand C6M (Shadow Robot, Англия, http://www.shadowrobot.com)
Система «Shadow dexterous hand»
Слайд 5Shadow dexterous hand C6M
Shadow dexterous hand C6M

Слайд 6Коммерчески доступные протезы
MyoSensorHand (Otto Bock, Австрия, http://www.ottobock.com)
Система миоэлектрических биопротезов, обеспечивающая захват и
Коммерчески доступные протезы
MyoSensorHand (Otto Bock, Австрия, http://www.ottobock.com)
Система миоэлектрических биопротезов, обеспечивающая захват и
Слайд 7Протезы - MyoSensorHand, i-LIMB
Инструкция 1
Инструкция 2
Инструкция i-LIMB
Протезы - MyoSensorHand, i-LIMB
Инструкция 1
Инструкция 2
Инструкция i-LIMB

Слайд 8Пневмо-протезы (видео 2004 года)
Пневмо-протезы (видео 2004 года)
Слайд 9Биопротезы нового поколения
RSLSteeper (2010, Bebionic, Англия, http://www.bebionic.com)
Управляемый от биопотенциалов манипулятор нового поколения с
Биопротезы нового поколения
RSLSteeper (2010, Bebionic, Англия, http://www.bebionic.com)
Управляемый от биопотенциалов манипулятор нового поколения с
Слайд 10Механический тип управления
Механический тип управления
Слайд 11От перчаток виртуальной реальности
От перчаток виртуальной реальности
Слайд 12ЭМГ-управление от Microsoft (2009)
«Одеваемый мускульно-компьютерный интерфейс» (wearable muscle-computer interface) - разработка фирмы
ЭМГ-управление от Microsoft (2009)
«Одеваемый мускульно-компьютерный интерфейс» (wearable muscle-computer interface) - разработка фирмы
Слайд 13ЭМГ-управление от Microsoft – новый тип HCI
ЭМГ-управление от Microsoft – новый тип HCI
Слайд 14ЭЭГ-управление (2011, система АМО)
http://www.robaid.com/bionics/brain-controlled-artificial-muscle-operated-amo-arm.htm
2 студента из Университета Риерсона, США создали за 72
ЭЭГ-управление (2011, система АМО)
http://www.robaid.com/bionics/brain-controlled-artificial-muscle-operated-amo-arm.htm
2 студента из Университета Риерсона, США создали за 72
Слайд 15Вопросы:
Можем ли мы воспроизвести подобные технологии?
Какие ресурсы и сколько времени нужно для
Вопросы:
Можем ли мы воспроизвести подобные технологии?
Какие ресурсы и сколько времени нужно для
Слайд 16Цели проекта, требуемые ресурсы и технологии
Разработка алгоритмов и технологической основы системы управления
Цели проекта, требуемые ресурсы и технологии
Разработка алгоритмов и технологической основы системы управления
Слайд 17Основные задачи проекта
Создать манипулятор и его привод с индивидуальным контролем движений пальцев.
Выделить
Основные задачи проекта
Создать манипулятор и его привод с индивидуальным контролем движений пальцев.
Выделить
Слайд 18Типовое ТЗ на манипуляторы (от предплечья):
Требования к кинематике:
Число степеней подвижности: 24, в
Типовое ТЗ на манипуляторы (от предплечья):
Требования к кинематике:
Число степеней подвижности: 24, в
Слайд 19Типовое ТЗ на манипуляторы (от предплечья, прод.):
Силовые характеристики:
Усилия, развиваемые в сочленениях пальцев:
Типовое ТЗ на манипуляторы (от предплечья, прод.):
Силовые характеристики:
Усилия, развиваемые в сочленениях пальцев:
Слайд 20Типовое ТЗ на манипуляторы (от предплечья, прод.):
Требования к интерфейсу :
Интерфейс для связи
Типовое ТЗ на манипуляторы (от предплечья, прод.):
Требования к интерфейсу :
Интерфейс для связи
Слайд 21Требуемые ресурсы и опыт по:
Созданию мехатронных устройств с большим количеством степеней подвижности
Созданию
Требуемые ресурсы и опыт по:
Созданию мехатронных устройств с большим количеством степеней подвижности
Созданию
Слайд 22Мехатроника
Прототип руки из алюминия (Нейроботикс)
Прототип руки из углепластика (Политермо)
Мехатроника
Прототип руки из алюминия (Нейроботикс)
Прототип руки из углепластика (Политермо)
Слайд 23Типовые паттерны захвата (часть 1: 7 из 14)
Захват тремя пальцами
Силовой захват четырьмя
Типовые паттерны захвата (часть 1: 7 из 14)
Захват тремя пальцами
Силовой захват четырьмя
Слайд 24Типовые паттерны захвата (часть 2):
Аккуратный открытый захват большим и указательным пальцами
Аккуратный закрытый
Типовые паттерны захвата (часть 2):
Аккуратный открытый захват большим и указательным пальцами
Аккуратный закрытый
Слайд 25Типовые паттерны захвата (часть 3 – пример №1):
Захват тремя пальцами
Трехпалый захват
Типовые паттерны захвата (часть 3 – пример №1):
Захват тремя пальцами
Трехпалый захват
Слайд 26Типовые паттерны захвата (часть 3 – пример №2):
Силовой захват четырьмя пальцами ладони
Типовые паттерны захвата (часть 3 – пример №2):
Силовой захват четырьмя пальцами ладони
Слайд 27Типовые паттерны захвата (часть 3 – пример №3):
Захват компьютерной мыши
При данном
Типовые паттерны захвата (часть 3 – пример №3):
Захват компьютерной мыши
При данном
Слайд 28Типовые паттерны захвата (часть 3 – пример №3):
Захват компьютерной мыши
При данном
Типовые паттерны захвата (часть 3 – пример №3):
Захват компьютерной мыши
При данном
Слайд 29Кинематическая модель
Кинематическая модель
Слайд 30Приводы на серводвигателях
Приводы на серводвигателях

Слайд 31Приводы на пневмо-мышцах
Видео №1
Видео №2
Видео №1
Видео №2
Приводы на пневмо-мышцах
Видео №1
Видео №2
Видео №1
Видео №2

Слайд 32Регистрация биопотенциалов
Количество каналов – от 52 до 160
Частота опроса – до 2000
Регистрация биопотенциалов
Количество каналов – от 52 до 160
Частота опроса – до 2000

Слайд 33Матричные электроды
Матричные электроды
 О подготовке общеобразовательных учреждений к началу 2012–2013 учебного года
О подготовке общеобразовательных учреждений к началу 2012–2013 учебного года Молодёжные субкультуры
Молодёжные субкультуры Презентация на тему Непосредственная образовательная деятельность в ДОУ
Презентация на тему Непосредственная образовательная деятельность в ДОУ Буквы К, к, обозначающие согласные звуки [к], [к`]
Буквы К, к, обозначающие согласные звуки [к], [к`] Построение разреза по зданию
Построение разреза по зданию Презентация на тему БАСНЯ КАК ЭПИЧЕСКИЙ ЖАНР
Презентация на тему БАСНЯ КАК ЭПИЧЕСКИЙ ЖАНР перевод чисел в двоичную систему счисления
перевод чисел в двоичную систему счисления Презентация на тему Виды движения Земли
Презентация на тему Виды движения Земли Juno and Avos
Juno and Avos Презентация на тему Гигиена кожи рук. Болезни грязных рук
Презентация на тему Гигиена кожи рук. Болезни грязных рук Презентация интерактивного мультимедийного пособия «Визуальная энциклопедия»
Презентация интерактивного мультимедийного пособия «Визуальная энциклопедия» Необыкновенные уголки Земли. Фото
Необыкновенные уголки Земли. Фото От кареты до ракеты
От кареты до ракеты Инвестиционная политика на транспорте
Инвестиционная политика на транспорте Таять может, Да не лед. Не фонарь, А свет дает.
Таять может, Да не лед. Не фонарь, А свет дает. История денежных знаков России
История денежных знаков России Выращивание авокадо в домашних условиях
Выращивание авокадо в домашних условиях Потенциальные возможности размножения организмов
Потенциальные возможности размножения организмов Основные показатели надежности систем внутридомового электроснабжения. Тема 1
Основные показатели надежности систем внутридомового электроснабжения. Тема 1 Описание и технически параметри на компютърна система
Описание и технически параметри на компютърна система Правила безопасности в кабинете информатики
Правила безопасности в кабинете информатики Брендинг бара Bells
Брендинг бара Bells Криптовалюта. Биткойн
Криптовалюта. Биткойн Культура Древней Руси 9 века
Культура Древней Руси 9 века Марко Жераси (Marco Geraci) Эксперт Совета по пенсионной реформе при Правительстве Франции
Марко Жераси (Marco Geraci) Эксперт Совета по пенсионной реформе при Правительстве Франции Происхождение и развитие человека
Происхождение и развитие человека Школа позиционирования. Стратегический менеджмент
Школа позиционирования. Стратегический менеджмент 1299268
1299268