- Теория Автоматического Управления

Содержание
- 2. Теория Автоматического Управления Цель курса состоит в изучении принципов автоматического управления, типов систем автоматического управления, используемых
- 3. 1.1. Общие понятия 1.2. Фундаментальные принципы управления 2.1. Основные виды САУ 2.2. Статические характеристики 2.3. Статическое
- 4. 1.1 Общие понятия Теория автоматического управления (ТАУ) появилась во второй половине 19 века сначала как теория
- 5. 1.2 Фундаментальные принципы управления 1.2.1. Принцип разомкнутого управления 1.2.2. Принцип компенсации 1.2.3. Принцип обратной связи
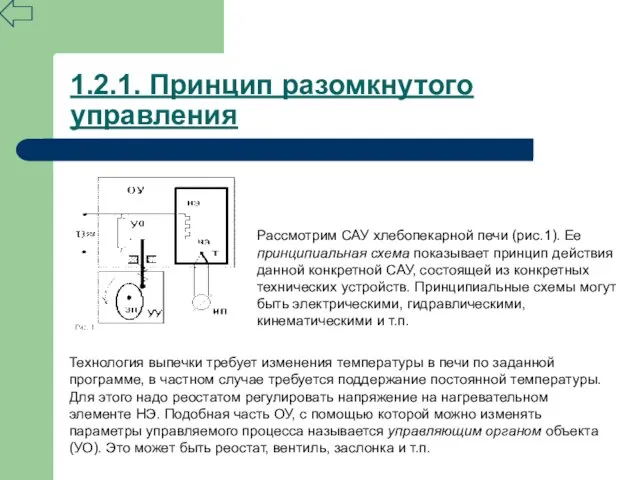
- 6. 1.2.1. Принцип разомкнутого управления Рассмотрим САУ хлебопекарной печи (рис.1). Ее принципиальная схема показывает принцип действия данной
- 7. Часть ОУ, которая преобразует управляемую величину в пропорциональную ей величину, удобную для использования в САУ, называют
- 8. Задающим устройством (ЗУ) называется устройство, задающее программу изменения управляющего воздействия, то есть формирующее задающий сигнал uо(t).
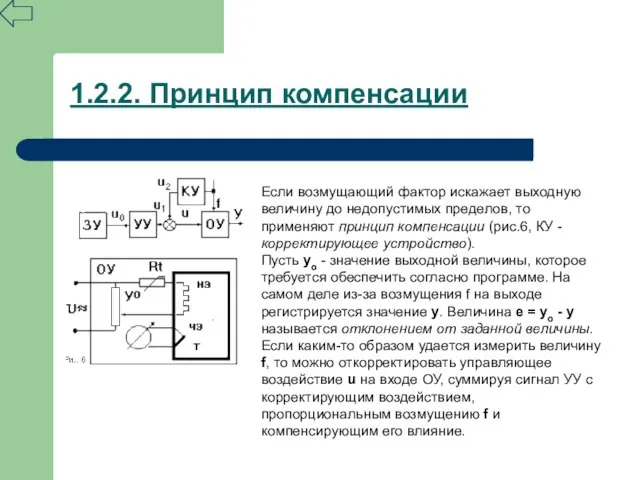
- 9. 1.2.2. Принцип компенсации Если возмущающий фактор искажает выходную величину до недопустимых пределов, то применяют принцип компенсации
- 10. 1.2.2. Принцип компенсации Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и
- 11. 1.2.3. Принцип обратной связи Наибольшее распространение в технике получил принцип обратной связи (рис.7). Здесь управляющее воздействие
- 12. 1.2.3. Принцип обратной связи В частном случае (рис.8) ЗУ формирует требуемое значение выходной величины yо(t), которое
- 13. 1.2.3. Принцип обратной связи Такое управление в функции отклонения называется регулированием, а подобную САУ называют системой
- 14. Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации,
- 15. 2.1. Основные виды САУ В зависимости от принципа и закона функционирования ЗУ, задающего программу изменения выходной
- 16. 2.1. Основные виды САУ Следящие системы отличаются от программных лишь тем, что программа y = f(t)
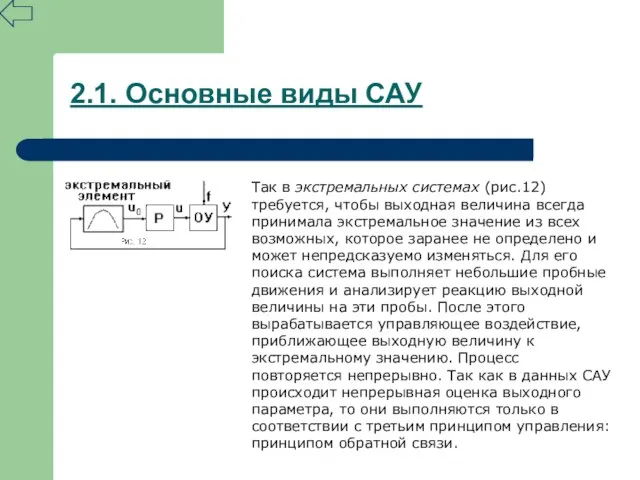
- 17. 2.1. Основные виды САУ Так в экстремальных системах (рис.12) требуется, чтобы выходная величина всегда принимала экстремальное
- 18. Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило, сложная обработка информации о
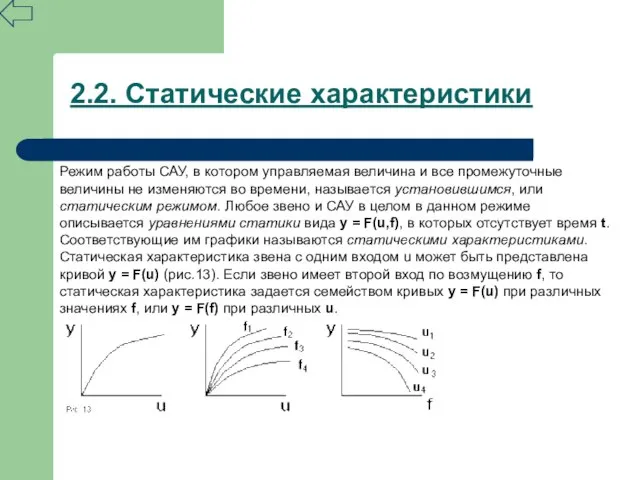
- 19. 2.2. Статические характеристики Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются
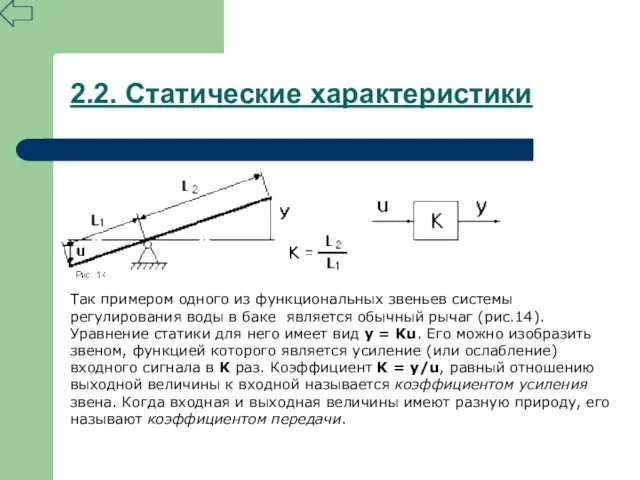
- 20. 2.2. Статические характеристики Так примером одного из функциональных звеньев системы регулирования воды в баке является обычный
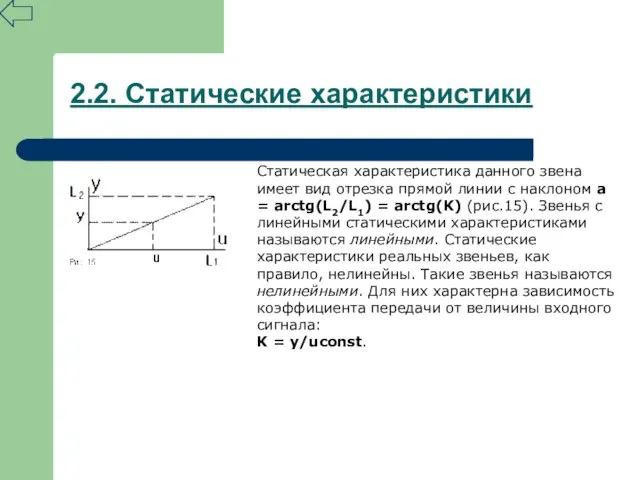
- 21. 2.2. Статические характеристики Статическая характеристика данного звена имеет вид отрезка прямой линии с наклоном a =
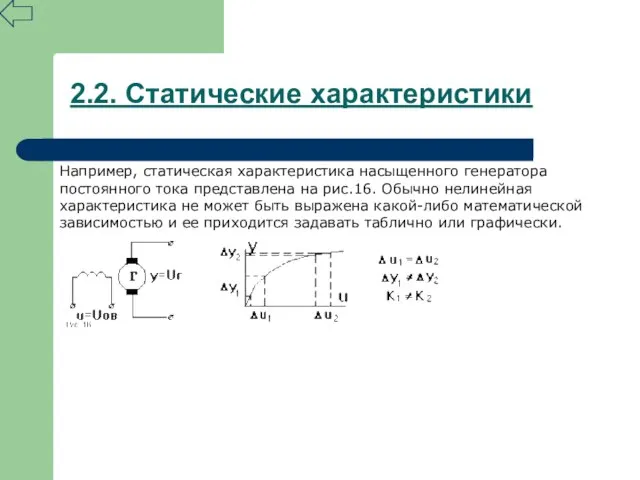
- 22. 2.2. Статические характеристики Например, статическая характеристика насыщенного генератора постоянного тока представлена на рис.16. Обычно нелинейная характеристика
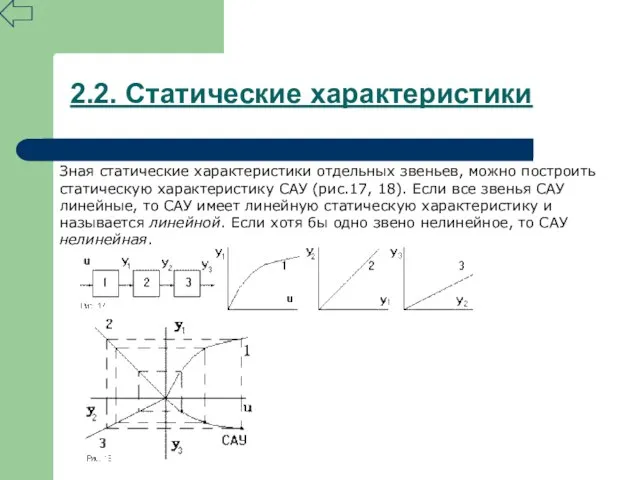
- 23. 2.2. Статические характеристики Зная статические характеристики отдельных звеньев, можно построить статическую характеристику САУ (рис.17, 18). Если
- 24. 2.2. Статические характеристики Звенья, для которых можно задать статическую характеристику в виде жесткой функциональной зависимости выходной
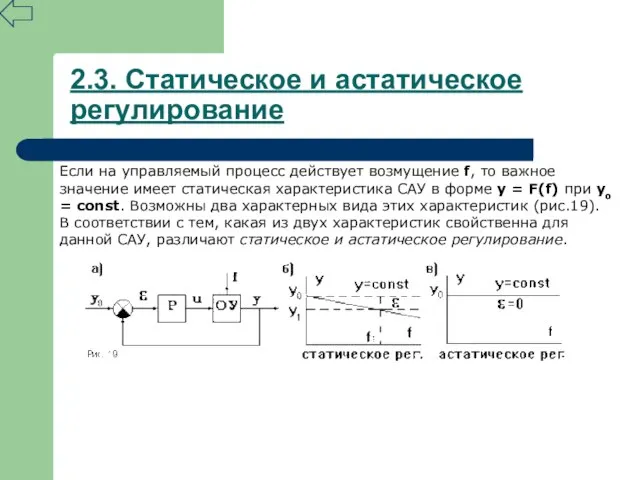
- 25. 2.3. Статическое и астатическое регулирование Если на управляемый процесс действует возмущение f, то важное значение имеет
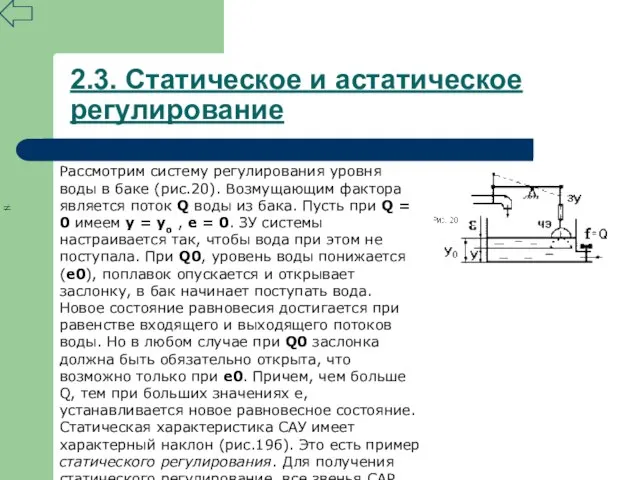
- 26. Рассмотрим систему регулирования уровня воды в баке (рис.20). Возмущающим фактора является поток Q воды из бака.
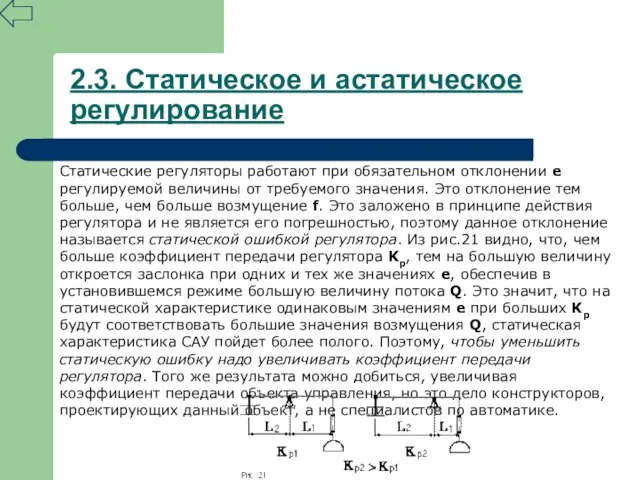
- 27. 2.3. Статическое и астатическое регулирование Статические регуляторы работают при обязательном отклонении e регулируемой величины от требуемого
- 28. 2.3. Статическое и астатическое регулирование Статизм d, САР, характеризует насколько сильно значение регулируемой величины отклоняется от
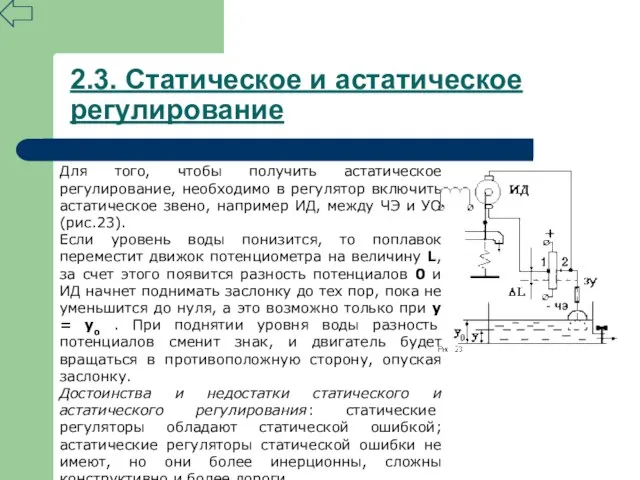
- 29. Для того, чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено, например ИД, между ЧЭ
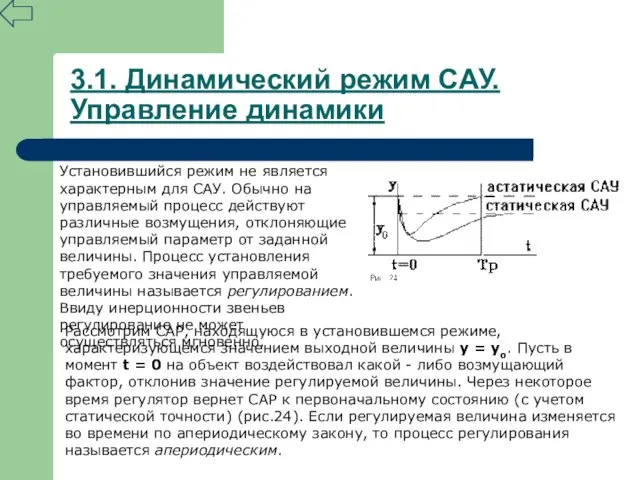
- 30. 3.1. Динамический режим САУ. Управление динамики Установившийся режим не является характерным для САУ. Обычно на управляемый
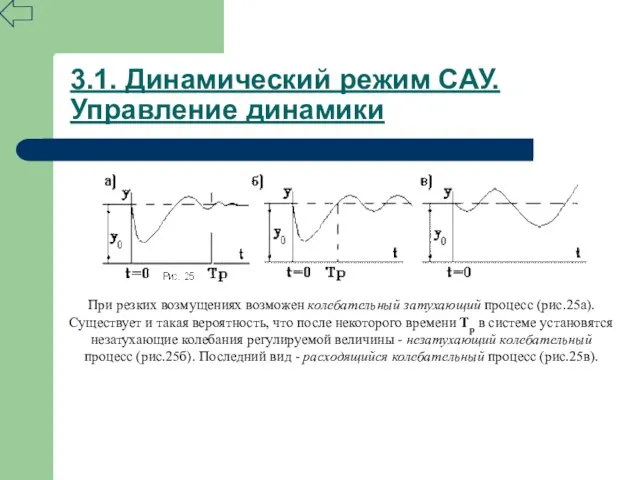
- 31. 3.1. Динамический режим САУ. Управление динамики При резких возмущениях возможен колебательный затухающий процесс (рис.25а). Существует и
- 32. 3.1. Динамический режим САУ. Управление динамики Таким образом, основным режимом работы САУ считается динамический режим, характеризующийся
- 33. 3.2. Линеаризация уравнения динамики В общем случае уравнение динамики оказывается нелинейным, так как реальные звенья САУ
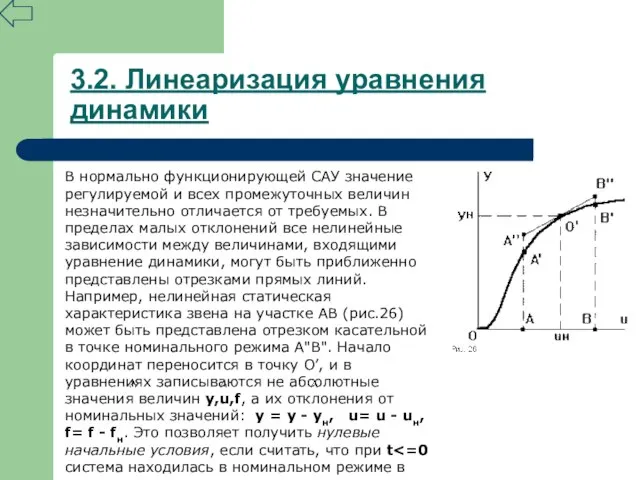
- 34. 3.2. Линеаризация уравнения динамики В нормально функционирующей САУ значение регулируемой и всех промежуточных величин незначительно отличается
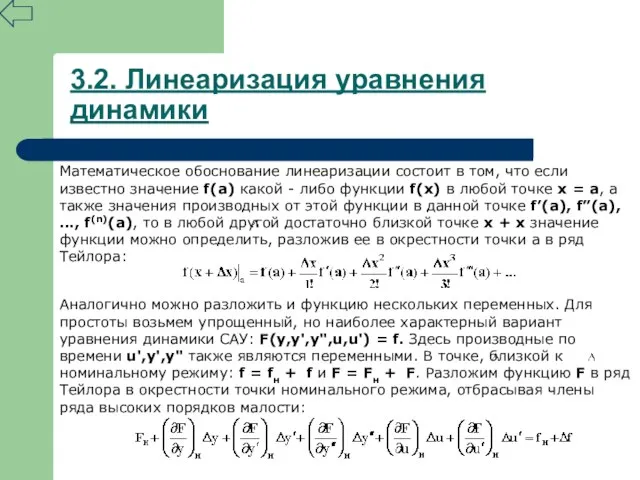
- 35. 3.2. Линеаризация уравнения динамики Математическое обоснование линеаризации состоит в том, что если известно значение f(a) какой
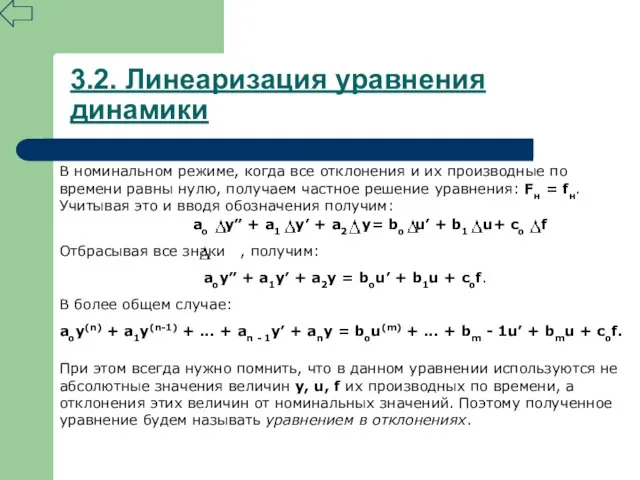
- 36. 3.2. Линеаризация уравнения динамики В номинальном режиме, когда все отклонения и их производные по времени равны
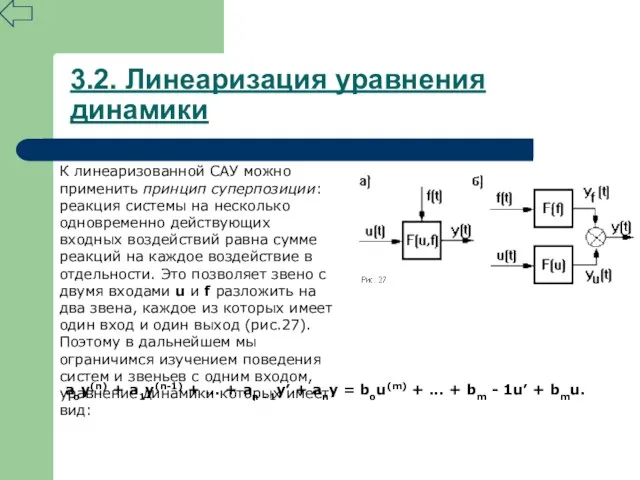
- 37. 3.2. Линеаризация уравнения динамики К линеаризованной САУ можно применить принцип суперпозиции: реакция системы на несколько одновременно
- 38. 3.2. Линеаризация уравнения динамики Это уравнение описывает САУ в динамическом режиме лишь приближенно с той точностью,
- 39. 3.3. Передаточная функция В ТАУ часто используют операторную форму записи дифференциальных уравнений. При этом вводится понятие
- 40. 3.3. Передаточная функция Поэтому уравнение динамики можно записать также в виде: Дифференциальный оператор W(p) называют передаточной
- 41. 3.3. Передаточная функция Звено САУ с известной передаточной функцией называется динамическим звеном. Оно изображается прямоугольником, внутри
- 42. 3.4. Элементарные динамические звенья Динамика большинства функциональных элементов САУ независимо от исполнения может быть описана одинаковыми
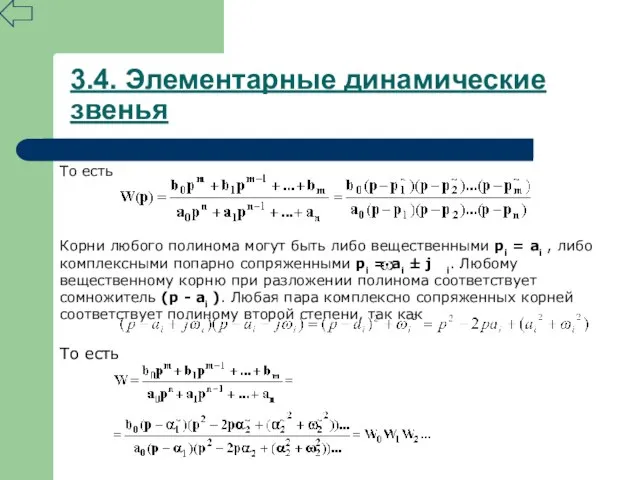
- 43. 3.4. Элементарные динамические звенья То есть Корни любого полинома могут быть либо вещественными pi = ai
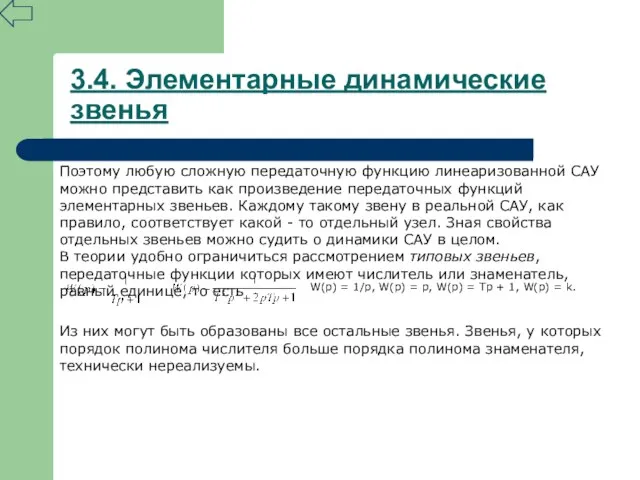
- 44. 3.4. Элементарные динамические звенья Поэтому любую сложную передаточную функцию линеаризованной САУ можно представить как произведение передаточных
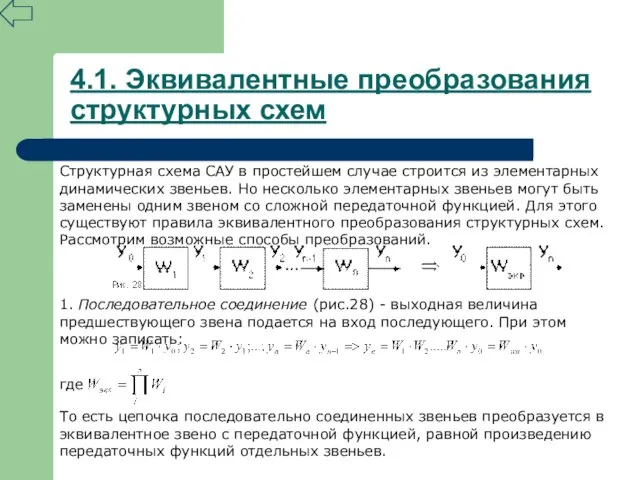
- 45. 4.1. Эквивалентные преобразования структурных схем Структурная схема САУ в простейшем случае строится из элементарных динамических звеньев.
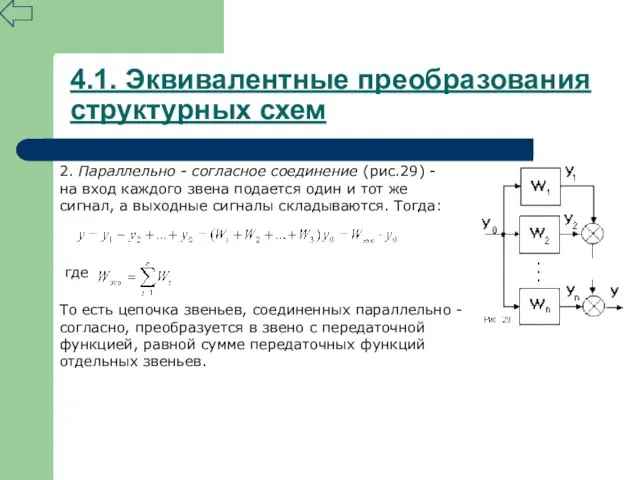
- 46. 4.1. Эквивалентные преобразования структурных схем 2. Параллельно - согласное соединение (рис.29) - на вход каждого звена
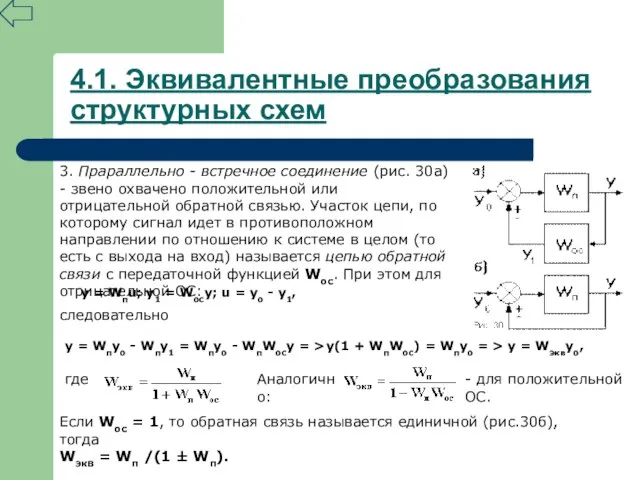
- 47. 4.1. Эквивалентные преобразования структурных схем 3. Прараллельно - встречное соединение (рис. 30а) - звено охвачено положительной
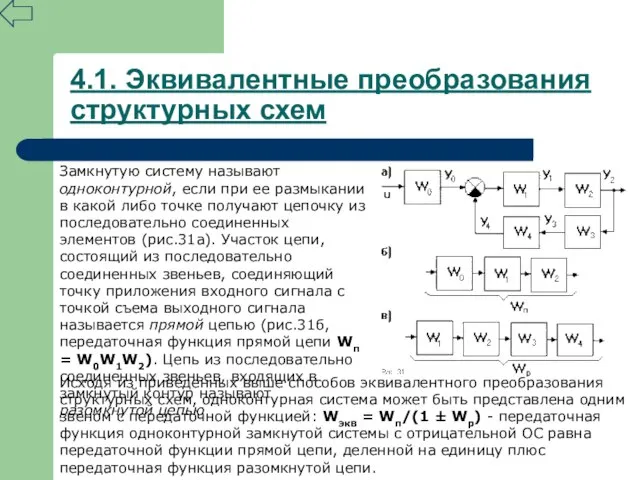
- 48. 4.1. Эквивалентные преобразования структурных схем Замкнутую систему называют одноконтурной, если при ее размыкании в какой либо
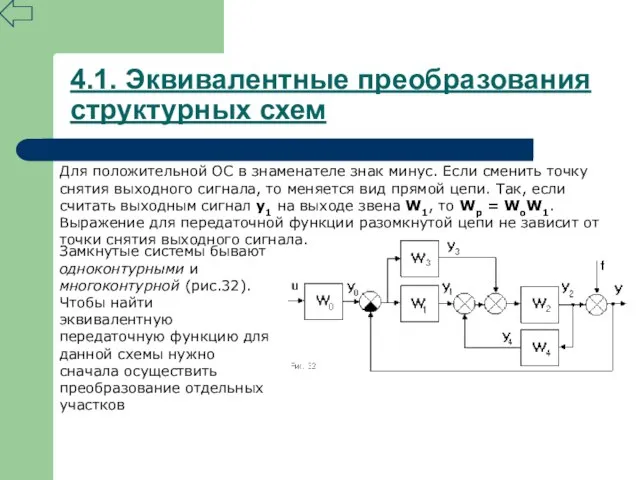
- 49. 4.1. Эквивалентные преобразования структурных схем Для положительной ОС в знаменателе знак минус. Если сменить точку снятия
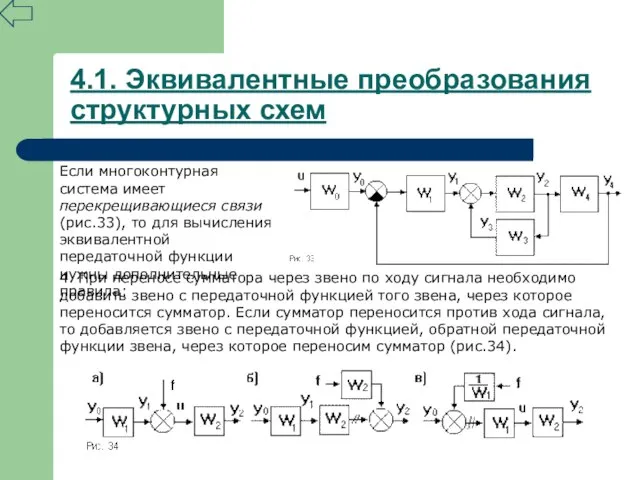
- 50. 4.1. Эквивалентные преобразования структурных схем Если многоконтурная система имеет перекрещивающиеся связи (рис.33), то для вычисления эквивалентной
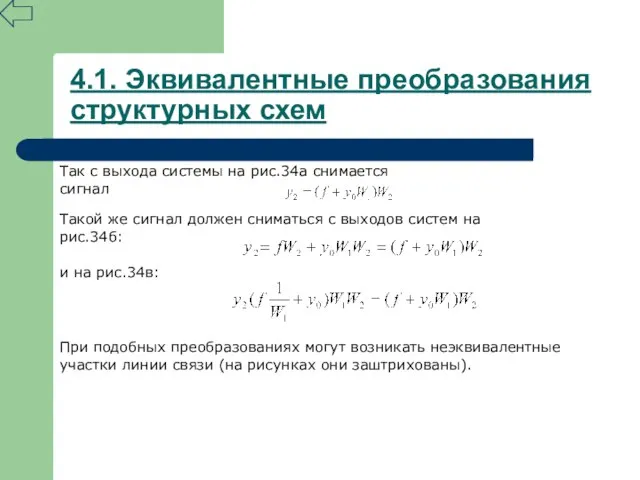
- 51. 4.1. Эквивалентные преобразования структурных схем Так с выхода системы на рис.34а снимается сигнал Такой же сигнал
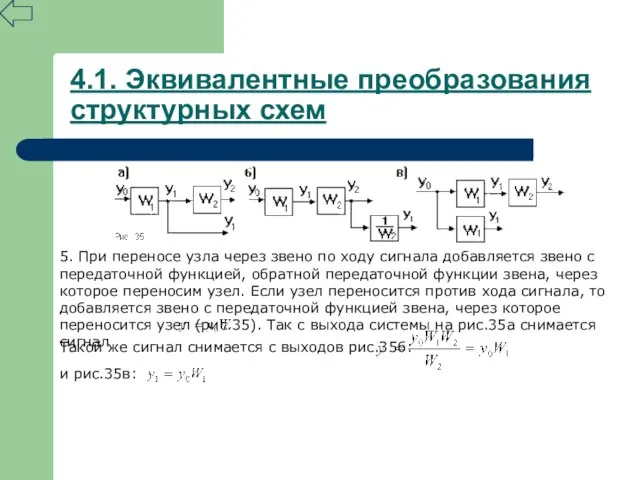
- 52. 4.1. Эквивалентные преобразования структурных схем 5. При переносе узла через звено по ходу сигнала добавляется звено
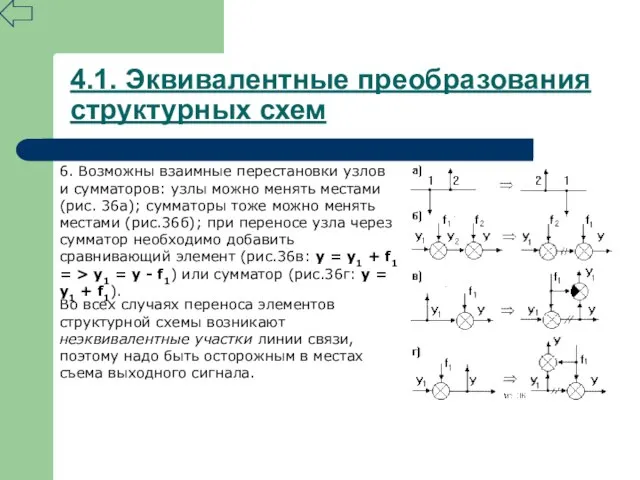
- 53. 4.1. Эквивалентные преобразования структурных схем 6. Возможны взаимные перестановки узлов и сумматоров: узлы можно менять местами
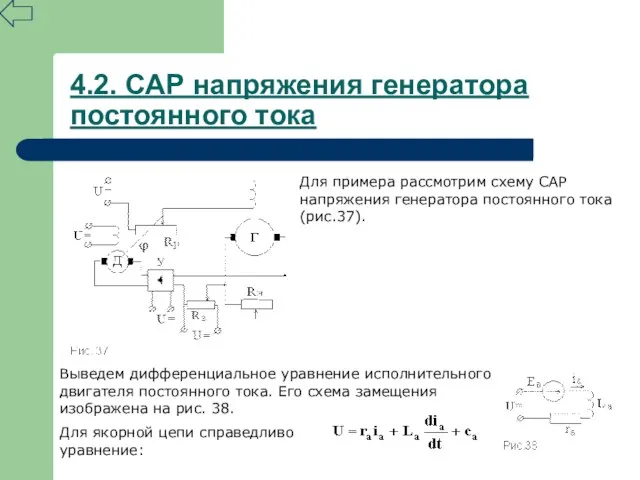
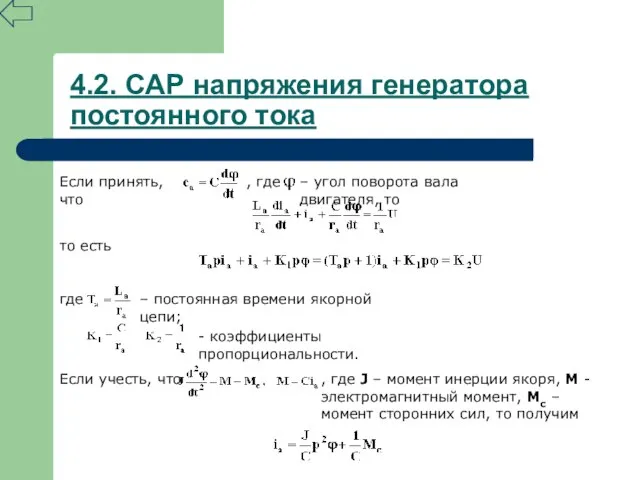
- 54. 4.2. САР напряжения генератора постоянного тока Для примера рассмотрим схему САР напряжения генератора постоянного тока (рис.37).
- 55. 4.2. САР напряжения генератора постоянного тока Если принять, что , где – угол поворота вала двигателя,
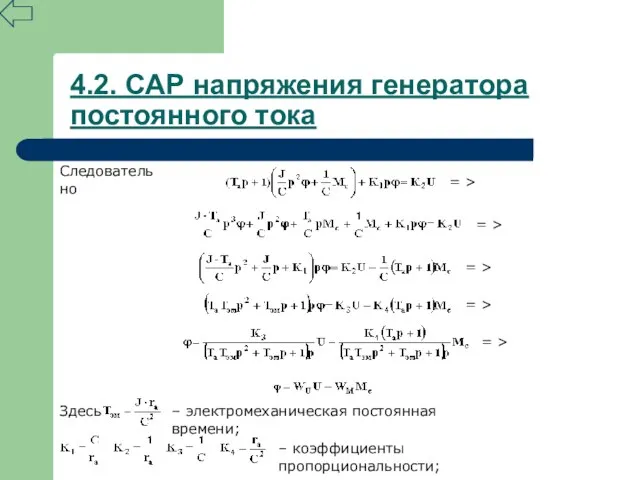
- 56. 4.2. САР напряжения генератора постоянного тока Следовательно = > = > = > = > =
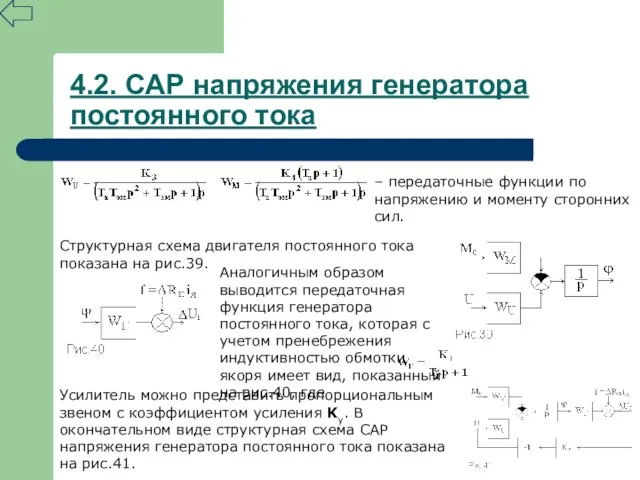
- 57. 4.2. САР напряжения генератора постоянного тока – передаточные функции по напряжению и моменту сторонних сил. Структурная
- 58. 5.1. Понятие временных характеристик Для оценки динамических свойств системы и отдельных звеньев принято исследовать их реакцию
- 59. Особенно важное значение в ТАУ придают ступенчатому воздействию 1(t) = . Все остальные воздействия могут быть
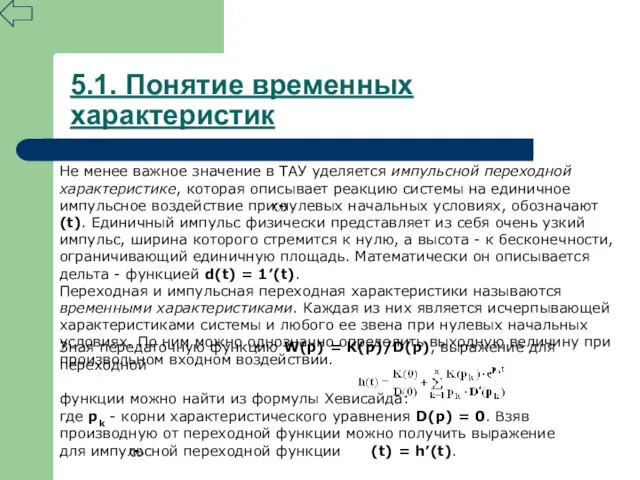
- 60. 5.1. Понятие временных характеристик Не менее важное значение в ТАУ уделяется импульсной переходной характеристике, которая описывает
- 61. 5.2.1. Безынерционное (пропорциональное, усилительное) звено 5.2.2. Интегрирующее (астатическое) звено 5.2.3. Инерционное звено первого порядка (апериодическое) 5.2.4.
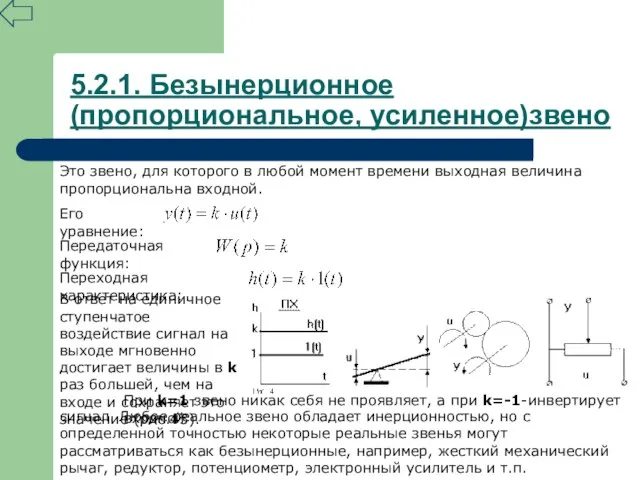
- 62. 5.2.1. Безынерционное (пропорциональное, усиленное)звено Это звено, для которого в любой момент времени выходная величина пропорциональна входной.
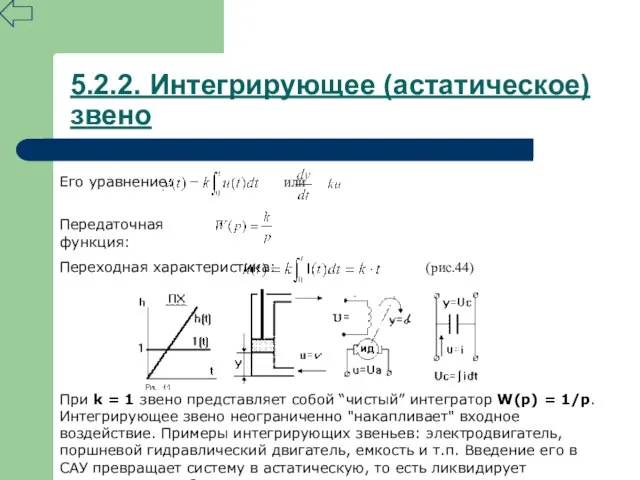
- 63. 5.2.2. Интегрирующее (астатическое) звено Его уравнение: или Передаточная функция: Переходная характеристика: (рис.44) При k = 1
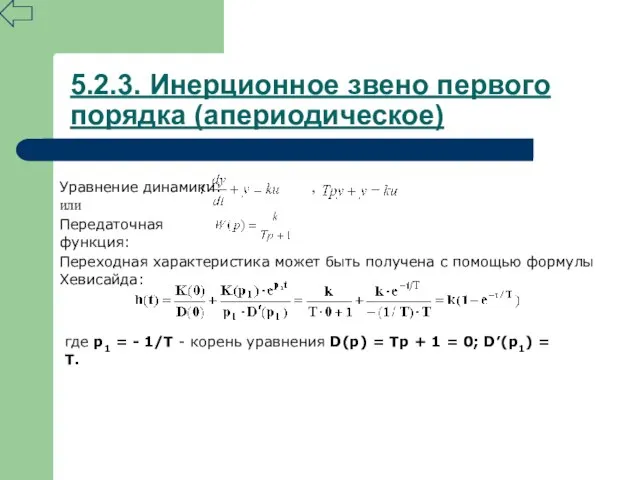
- 64. 5.2.3. Инерционное звено первого порядка (апериодическое) Уравнение динамики: , или Передаточная функция: Переходная характеристика может быть
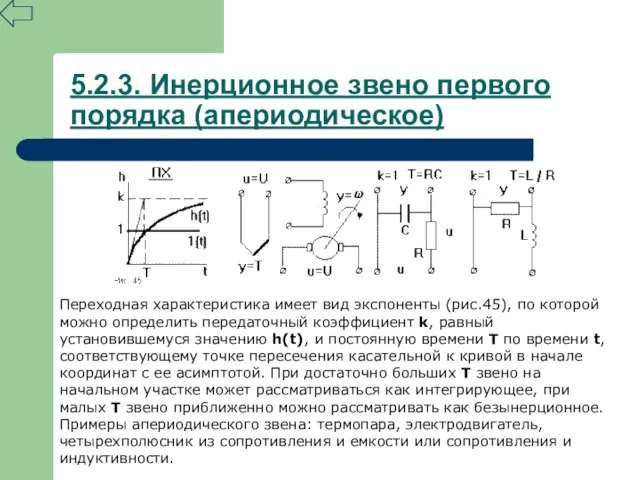
- 65. 5.2.3. Инерционное звено первого порядка (апериодическое) Переходная характеристика имеет вид экспоненты (рис.45), по которой можно определить
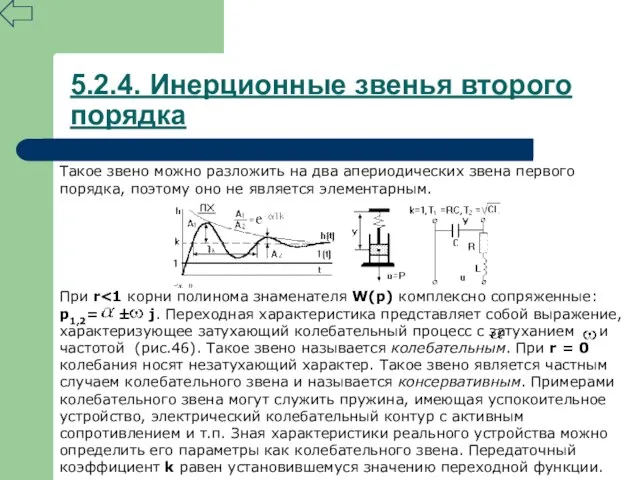
- 66. 5.2.4. Инерционные звенья второго порядка Его уравнение: Передаточная функция: Решение уравнения зависит от соотношения постоянных времени
- 67. 5.2.4. Инерционные звенья второго порядка Такое звено можно разложить на два апериодических звена первого порядка, поэтому
- 68. 5.2.5. Дифференцирующее звено Различают идеальное и реальное дифференцирующие звенья. Уравнение динамики идеального звена: , или y
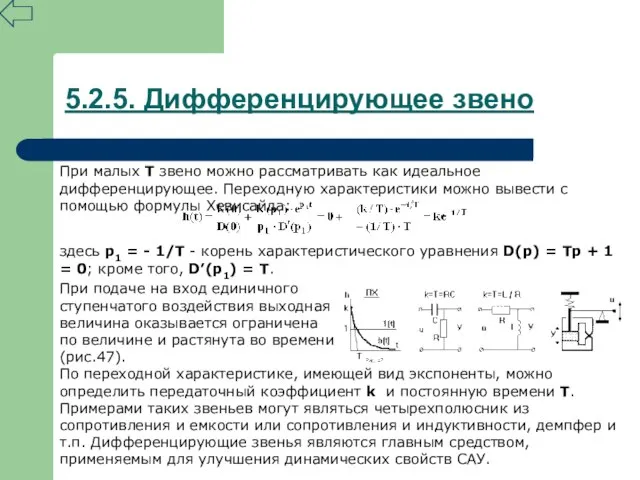
- 69. При малых Т звено можно рассматривать как идеальное дифференцирующее. Переходную характеристики можно вывести с помощью формулы
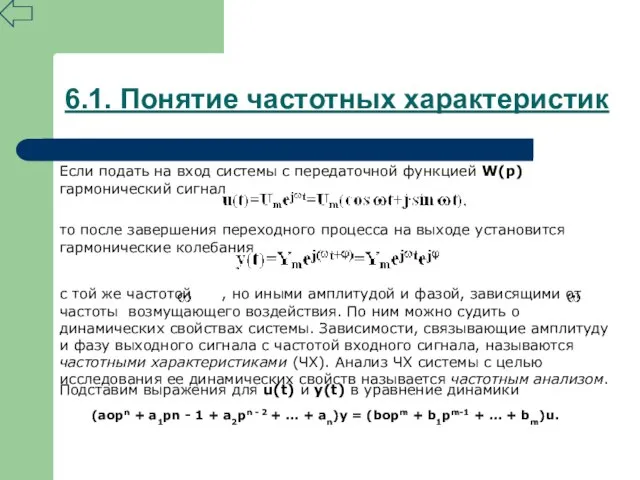
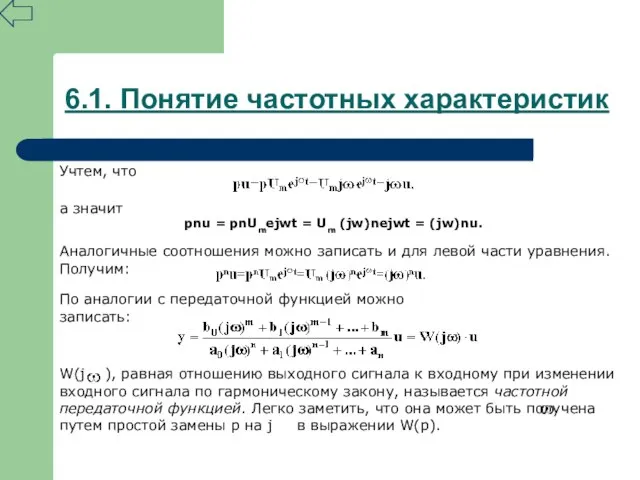
- 70. 6.1. Понятие частотных характеристик Если подать на вход системы с передаточной функцией W(p) гармонический сигнал то
- 71. 6.1. Понятие частотных характеристик Учтем, что а значит pnu = pnUmejwt = Um (jw)nejwt = (jw)nu.
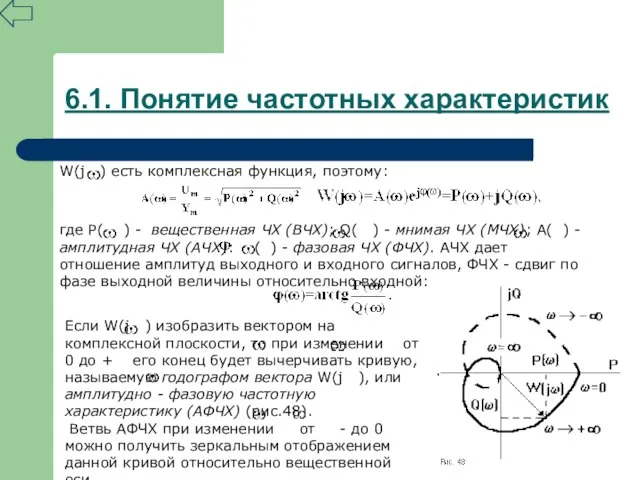
- 72. 6.1. Понятие частотных характеристик W(j ) есть комплексная функция, поэтому: где P( ) - вещественная ЧХ
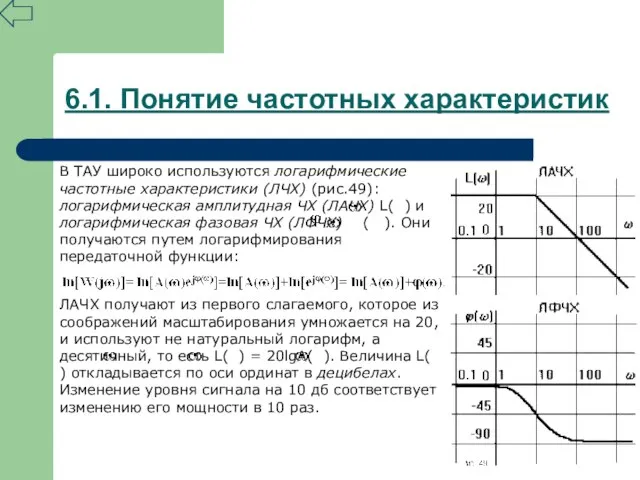
- 73. 6.1. Понятие частотных характеристик В ТАУ широко используются логарифмические частотные характеристики (ЛЧХ) (рис.49): логарифмическая амплитудная ЧХ
- 74. 6.1. Понятие частотных характеристик Так как мощность гармонического сигнала Р пропорциональна квадрату его амплитуды А, то
- 75. 6.2.1. Безынерционное звено 6.2.2. Интегрирующее звено 6.2.3. Апериодическое звено 6.2.4. Инерционные звенья второго порядка 6.2.5. Правила
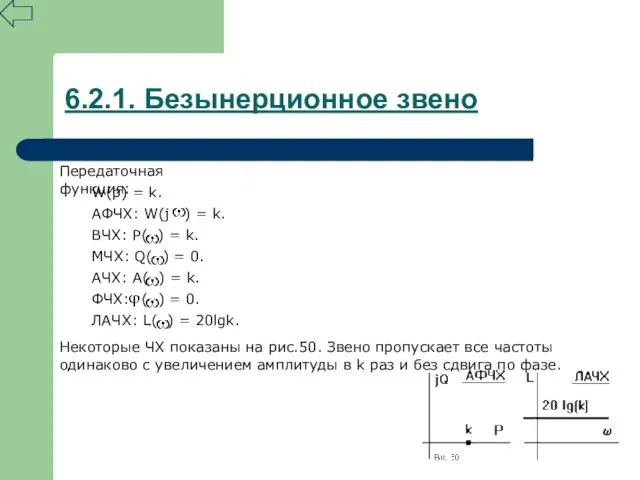
- 76. 6.2.1. Безынерционное звено Передаточная функция: W(p) = k. АФЧХ: W(j ) = k. ВЧХ: P( )
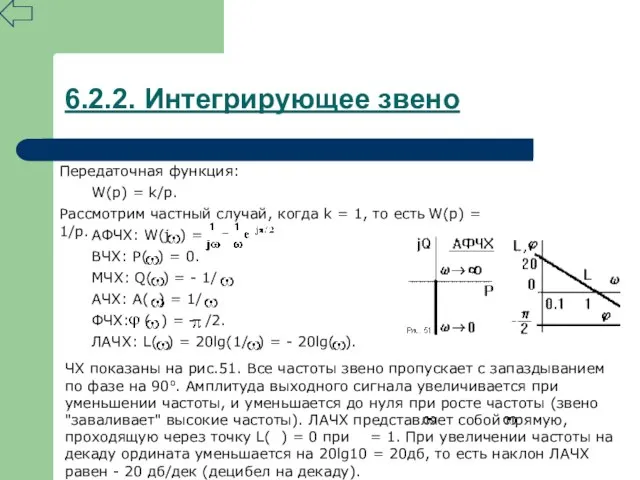
- 77. 6.2.2. Интегрирующее звено Передаточная функция: W(p) = k/p. Рассмотрим частный случай, когда k = 1, то
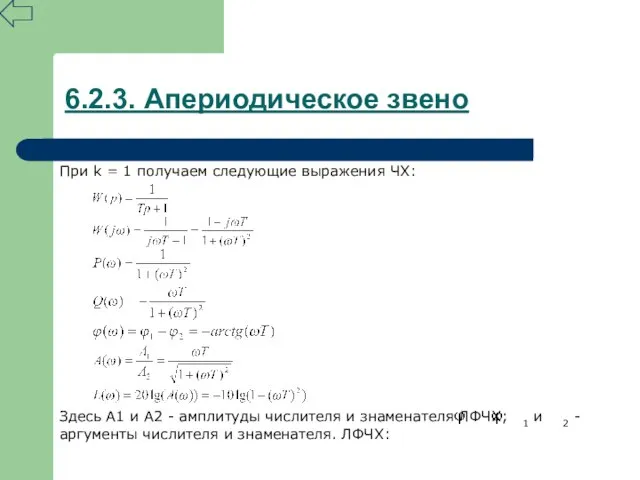
- 78. 6.2.3. Апериодическое звено При k = 1 получаем следующие выражения ЧХ: Здесь A1 и A2 -
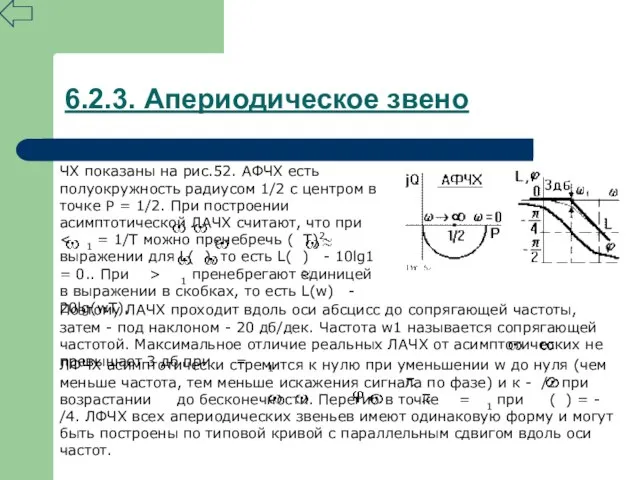
- 79. 6.2.3. Апериодическое звено ЧХ показаны на рис.52. АФЧХ есть полуокружность радиусом 1/2 с центром в точке
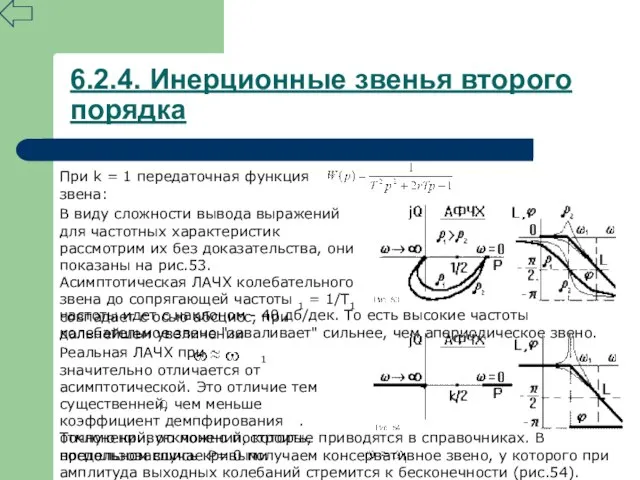
- 80. 6.2.4. Инерционные звенья второго порядка При k = 1 передаточная функция звена: В виду сложности вывода
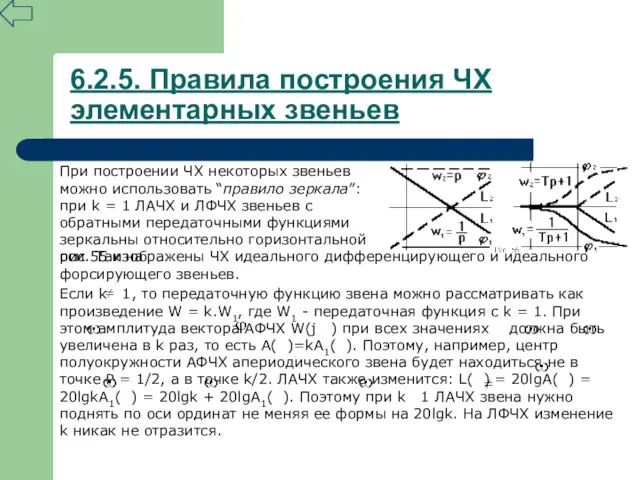
- 81. 6.2.5. Правила построения ЧХ элементарных звеньев При построении ЧХ некоторых звеньев можно использовать “правило зеркала”: при
- 83. Скачать презентацию
Слайд 2Теория Автоматического Управления
Цель курса состоит в изучении принципов автоматического управления, типов систем
Теория Автоматического Управления
Цель курса состоит в изучении принципов автоматического управления, типов систем
Слайд 31.1. Общие понятия
1.2. Фундаментальные принципы управления
2.1. Основные виды САУ
2.2. Статические характеристики
2.3. Статическое
1.1. Общие понятия
1.2. Фундаментальные принципы управления
2.1. Основные виды САУ
2.2. Статические характеристики
2.3. Статическое
Слайд 41.1 Общие понятия
Теория автоматического управления (ТАУ) появилась во второй половине 19 века
1.1 Общие понятия
Теория автоматического управления (ТАУ) появилась во второй половине 19 века
Слайд 51.2 Фундаментальные принципы управления
1.2.1. Принцип разомкнутого управления
1.2.2. Принцип компенсации
1.2.3. Принцип обратной связи
1.2 Фундаментальные принципы управления
1.2.1. Принцип разомкнутого управления
1.2.2. Принцип компенсации
1.2.3. Принцип обратной связи
Слайд 61.2.1. Принцип разомкнутого управления
Рассмотрим САУ хлебопекарной печи (рис.1). Ее принципиальная схема показывает
1.2.1. Принцип разомкнутого управления
Рассмотрим САУ хлебопекарной печи (рис.1). Ее принципиальная схема показывает
Слайд 7Часть ОУ, которая преобразует управляемую величину в пропорциональную ей величину, удобную для
Часть ОУ, которая преобразует управляемую величину в пропорциональную ей величину, удобную для
Слайд 8Задающим устройством (ЗУ) называется устройство, задающее программу изменения управляющего воздействия, то есть
Задающим устройством (ЗУ) называется устройство, задающее программу изменения управляющего воздействия, то есть
Слайд 91.2.2. Принцип компенсации
Если возмущающий фактор искажает выходную величину до недопустимых пределов, то
1.2.2. Принцип компенсации
Если возмущающий фактор искажает выходную величину до недопустимых пределов, то
Слайд 101.2.2. Принцип компенсации
Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины
1.2.2. Принцип компенсации
Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины
Слайд 111.2.3. Принцип обратной связи
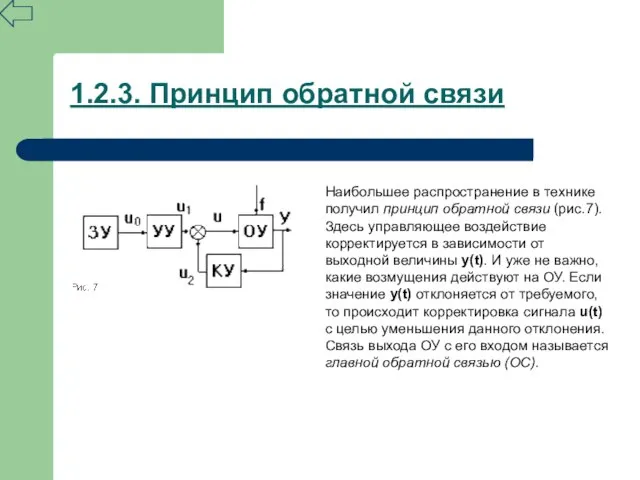
Наибольшее распространение в технике получил принцип обратной связи (рис.7).
1.2.3. Принцип обратной связи
Наибольшее распространение в технике получил принцип обратной связи (рис.7).
Слайд 121.2.3. Принцип обратной связи
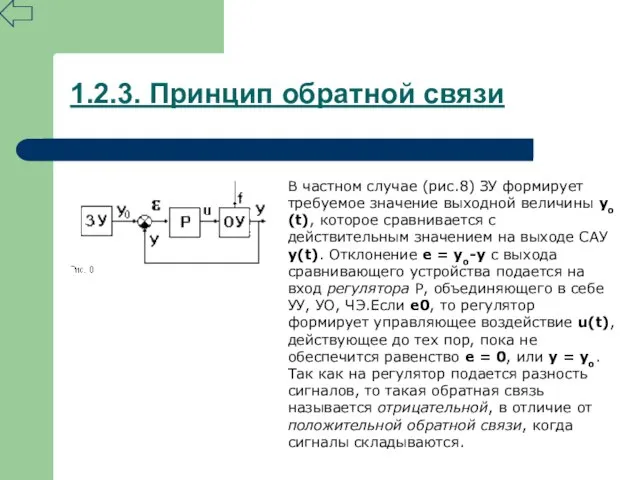
В частном случае (рис.8) ЗУ формирует требуемое значение выходной
1.2.3. Принцип обратной связи
В частном случае (рис.8) ЗУ формирует требуемое значение выходной
Слайд 131.2.3. Принцип обратной связи
Такое управление в функции отклонения называется регулированием, а подобную
1.2.3. Принцип обратной связи
Такое управление в функции отклонения называется регулированием, а подобную

Слайд 14Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного
Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного
Слайд 152.1. Основные виды САУ
В зависимости от принципа и закона функционирования ЗУ, задающего
2.1. Основные виды САУ
В зависимости от принципа и закона функционирования ЗУ, задающего
Слайд 162.1. Основные виды САУ
Следящие системы отличаются от программных лишь тем, что программа
2.1. Основные виды САУ
Следящие системы отличаются от программных лишь тем, что программа
Слайд 172.1. Основные виды САУ
Так в экстремальных системах (рис.12) требуется, чтобы выходная величина
2.1. Основные виды САУ
Так в экстремальных системах (рис.12) требуется, чтобы выходная величина
Слайд 18Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило,
Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило,
Слайд 192.2. Статические характеристики
Режим работы САУ, в котором управляемая величина и все промежуточные
2.2. Статические характеристики
Режим работы САУ, в котором управляемая величина и все промежуточные
Слайд 202.2. Статические характеристики
Так примером одного из функциональных звеньев системы регулирования воды в
2.2. Статические характеристики
Так примером одного из функциональных звеньев системы регулирования воды в
Слайд 212.2. Статические характеристики
Статическая характеристика данного звена имеет вид отрезка прямой линии с
2.2. Статические характеристики
Статическая характеристика данного звена имеет вид отрезка прямой линии с
Слайд 222.2. Статические характеристики
Например, статическая характеристика насыщенного генератора постоянного тока представлена на рис.16.
2.2. Статические характеристики
Например, статическая характеристика насыщенного генератора постоянного тока представлена на рис.16.
Слайд 232.2. Статические характеристики
Зная статические характеристики отдельных звеньев, можно построить статическую характеристику САУ
2.2. Статические характеристики
Зная статические характеристики отдельных звеньев, можно построить статическую характеристику САУ
Слайд 242.2. Статические характеристики
Звенья, для которых можно задать статическую характеристику в виде жесткой
2.2. Статические характеристики
Звенья, для которых можно задать статическую характеристику в виде жесткой
Слайд 252.3. Статическое и астатическое регулирование
Если на управляемый процесс действует возмущение f, то
2.3. Статическое и астатическое регулирование
Если на управляемый процесс действует возмущение f, то
Слайд 26Рассмотрим систему регулирования уровня воды в баке (рис.20). Возмущающим фактора является поток
Рассмотрим систему регулирования уровня воды в баке (рис.20). Возмущающим фактора является поток
Слайд 272.3. Статическое и астатическое регулирование
Статические регуляторы работают при обязательном отклонении e регулируемой
2.3. Статическое и астатическое регулирование
Статические регуляторы работают при обязательном отклонении e регулируемой
Слайд 282.3. Статическое и астатическое регулирование
Статизм d, САР, характеризует насколько сильно значение регулируемой
2.3. Статическое и астатическое регулирование
Статизм d, САР, характеризует насколько сильно значение регулируемой
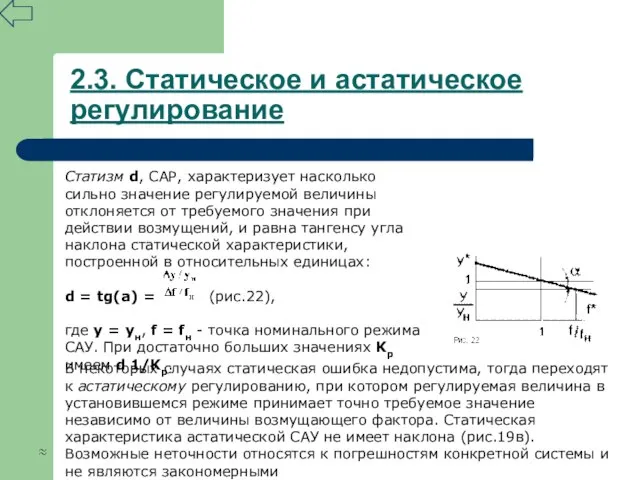
Слайд 29Для того, чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено,
Для того, чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено,
Слайд 303.1. Динамический режим САУ. Управление динамики
Установившийся режим не является характерным для САУ.
3.1. Динамический режим САУ. Управление динамики
Установившийся режим не является характерным для САУ.
Слайд 313.1. Динамический режим САУ. Управление динамики
При резких возмущениях возможен колебательный затухающий процесс
3.1. Динамический режим САУ. Управление динамики
При резких возмущениях возможен колебательный затухающий процесс
Слайд 323.1. Динамический режим САУ. Управление динамики
Таким образом, основным режимом работы САУ считается
3.1. Динамический режим САУ. Управление динамики
Таким образом, основным режимом работы САУ считается
Слайд 333.2. Линеаризация уравнения динамики
В общем случае уравнение динамики оказывается нелинейным, так как
3.2. Линеаризация уравнения динамики
В общем случае уравнение динамики оказывается нелинейным, так как
Слайд 343.2. Линеаризация уравнения динамики
В нормально функционирующей САУ значение регулируемой и всех промежуточных
3.2. Линеаризация уравнения динамики
В нормально функционирующей САУ значение регулируемой и всех промежуточных
Слайд 353.2. Линеаризация уравнения динамики
Математическое обоснование линеаризации состоит в том, что если известно
3.2. Линеаризация уравнения динамики
Математическое обоснование линеаризации состоит в том, что если известно
Слайд 363.2. Линеаризация уравнения динамики
В номинальном режиме, когда все отклонения и их производные
3.2. Линеаризация уравнения динамики
В номинальном режиме, когда все отклонения и их производные
Слайд 373.2. Линеаризация уравнения динамики
К линеаризованной САУ можно применить принцип суперпозиции: реакция системы
3.2. Линеаризация уравнения динамики
К линеаризованной САУ можно применить принцип суперпозиции: реакция системы
Слайд 383.2. Линеаризация уравнения динамики
Это уравнение описывает САУ в динамическом режиме лишь приближенно
3.2. Линеаризация уравнения динамики
Это уравнение описывает САУ в динамическом режиме лишь приближенно
Слайд 393.3. Передаточная функция
В ТАУ часто используют операторную форму записи дифференциальных уравнений. При
3.3. Передаточная функция
В ТАУ часто используют операторную форму записи дифференциальных уравнений. При
Слайд 403.3. Передаточная функция
Поэтому уравнение динамики можно записать также в виде:
Дифференциальный оператор W(p)
3.3. Передаточная функция
Поэтому уравнение динамики можно записать также в виде:
Дифференциальный оператор W(p)
Слайд 413.3. Передаточная функция
Звено САУ с известной передаточной функцией называется динамическим звеном. Оно
3.3. Передаточная функция
Звено САУ с известной передаточной функцией называется динамическим звеном. Оно
Слайд 423.4. Элементарные динамические звенья
Динамика большинства функциональных элементов САУ независимо от исполнения может
3.4. Элементарные динамические звенья
Динамика большинства функциональных элементов САУ независимо от исполнения может
Слайд 433.4. Элементарные динамические звенья
То есть
Корни любого полинома могут быть либо вещественными
3.4. Элементарные динамические звенья
То есть
Корни любого полинома могут быть либо вещественными
Слайд 443.4. Элементарные динамические звенья
Поэтому любую сложную передаточную функцию линеаризованной САУ можно представить
3.4. Элементарные динамические звенья
Поэтому любую сложную передаточную функцию линеаризованной САУ можно представить
Слайд 454.1. Эквивалентные преобразования структурных схем
Структурная схема САУ в простейшем случае строится из
4.1. Эквивалентные преобразования структурных схем
Структурная схема САУ в простейшем случае строится из
Слайд 464.1. Эквивалентные преобразования структурных схем
2. Параллельно - согласное соединение (рис.29) - на
4.1. Эквивалентные преобразования структурных схем
2. Параллельно - согласное соединение (рис.29) - на
Слайд 474.1. Эквивалентные преобразования структурных схем
3. Прараллельно - встречное соединение (рис. 30а) -
4.1. Эквивалентные преобразования структурных схем
3. Прараллельно - встречное соединение (рис. 30а) -
Слайд 484.1. Эквивалентные преобразования структурных схем
Замкнутую систему называют одноконтурной, если при ее размыкании
4.1. Эквивалентные преобразования структурных схем
Замкнутую систему называют одноконтурной, если при ее размыкании
Слайд 494.1. Эквивалентные преобразования структурных схем
Для положительной ОС в знаменателе знак минус. Если
4.1. Эквивалентные преобразования структурных схем
Для положительной ОС в знаменателе знак минус. Если
Слайд 504.1. Эквивалентные преобразования структурных схем
Если многоконтурная система имеет перекрещивающиеся связи (рис.33), то
4.1. Эквивалентные преобразования структурных схем
Если многоконтурная система имеет перекрещивающиеся связи (рис.33), то
Слайд 514.1. Эквивалентные преобразования структурных схем
Так с выхода системы на рис.34а снимается сигнал
4.1. Эквивалентные преобразования структурных схем
Так с выхода системы на рис.34а снимается сигнал
Слайд 524.1. Эквивалентные преобразования структурных схем
5. При переносе узла через звено по ходу
4.1. Эквивалентные преобразования структурных схем
5. При переносе узла через звено по ходу
Слайд 534.1. Эквивалентные преобразования структурных схем
6. Возможны взаимные перестановки узлов и сумматоров: узлы
4.1. Эквивалентные преобразования структурных схем
6. Возможны взаимные перестановки узлов и сумматоров: узлы
Слайд 544.2. САР напряжения генератора постоянного тока
Для примера рассмотрим схему САР напряжения генератора
4.2. САР напряжения генератора постоянного тока
Для примера рассмотрим схему САР напряжения генератора
Слайд 554.2. САР напряжения генератора постоянного тока
Если принять, что
, где
– угол
4.2. САР напряжения генератора постоянного тока
Если принять, что
, где
– угол
Слайд 564.2. САР напряжения генератора постоянного тока
Следовательно
= >
= >
= >
4.2. САР напряжения генератора постоянного тока
Следовательно
= >
= >
= >
Слайд 574.2. САР напряжения генератора постоянного тока
– передаточные функции по напряжению и моменту
4.2. САР напряжения генератора постоянного тока
– передаточные функции по напряжению и моменту
Слайд 585.1. Понятие временных характеристик
Для оценки динамических свойств системы и отдельных звеньев принято
5.1. Понятие временных характеристик
Для оценки динамических свойств системы и отдельных звеньев принято
Слайд 59Особенно важное значение в ТАУ придают ступенчатому воздействию
1(t) = .
Все
Особенно важное значение в ТАУ придают ступенчатому воздействию
1(t) = .
Все
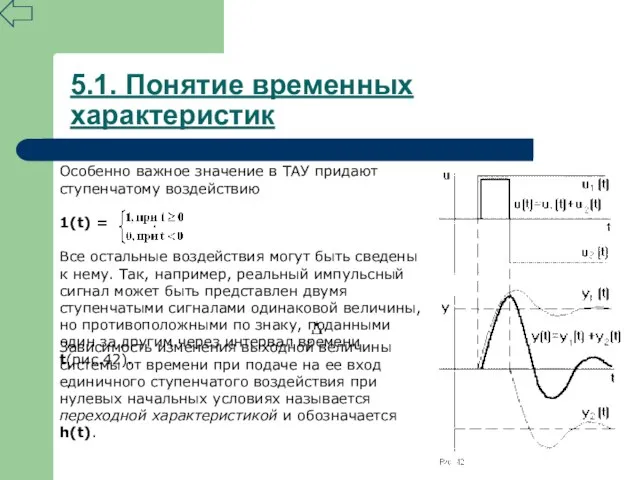
Слайд 605.1. Понятие временных характеристик
Не менее важное значение в ТАУ уделяется импульсной переходной
5.1. Понятие временных характеристик
Не менее важное значение в ТАУ уделяется импульсной переходной
Слайд 615.2.1. Безынерционное (пропорциональное, усилительное) звено
5.2.2. Интегрирующее (астатическое) звено
5.2.3. Инерционное звено первого
5.2.1. Безынерционное (пропорциональное, усилительное) звено
5.2.2. Интегрирующее (астатическое) звено
5.2.3. Инерционное звено первого
Слайд 625.2.1. Безынерционное (пропорциональное, усиленное)звено
Это звено, для которого в любой момент времени выходная
5.2.1. Безынерционное (пропорциональное, усиленное)звено
Это звено, для которого в любой момент времени выходная
Слайд 635.2.2. Интегрирующее (астатическое) звено
Его уравнение: или
Передаточная функция:
Переходная характеристика: (рис.44)
При k
5.2.2. Интегрирующее (астатическое) звено
Его уравнение: или
Передаточная функция:
Переходная характеристика: (рис.44)
При k
Слайд 645.2.3. Инерционное звено первого порядка (апериодическое)
Уравнение динамики: , или
Передаточная функция:
Переходная характеристика
5.2.3. Инерционное звено первого порядка (апериодическое)
Уравнение динамики: , или
Передаточная функция:
Переходная характеристика
Слайд 655.2.3. Инерционное звено первого порядка (апериодическое)
Переходная характеристика имеет вид экспоненты (рис.45), по
5.2.3. Инерционное звено первого порядка (апериодическое)
Переходная характеристика имеет вид экспоненты (рис.45), по
Слайд 665.2.4. Инерционные звенья второго порядка
Его уравнение:
Передаточная функция:
Решение уравнения зависит от
5.2.4. Инерционные звенья второго порядка
Его уравнение:
Передаточная функция:
Решение уравнения зависит от
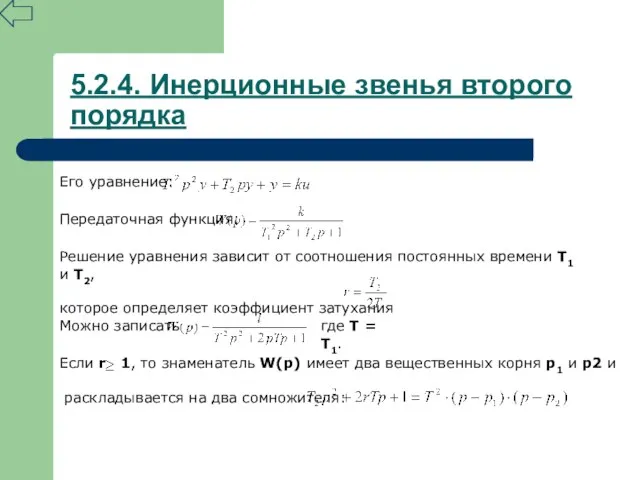
Слайд 675.2.4. Инерционные звенья второго порядка
Такое звено можно разложить на два апериодических звена
5.2.4. Инерционные звенья второго порядка
Такое звено можно разложить на два апериодических звена
Слайд 685.2.5. Дифференцирующее звено
Различают идеальное и реальное дифференцирующие звенья. Уравнение динамики
идеального звена:
5.2.5. Дифференцирующее звено
Различают идеальное и реальное дифференцирующие звенья. Уравнение динамики
идеального звена:
Слайд 69При малых Т звено можно рассматривать как идеальное дифференцирующее. Переходную характеристики можно
При малых Т звено можно рассматривать как идеальное дифференцирующее. Переходную характеристики можно
Слайд 706.1. Понятие частотных характеристик
Если подать на вход системы с передаточной функцией W(p)
6.1. Понятие частотных характеристик
Если подать на вход системы с передаточной функцией W(p)
Слайд 716.1. Понятие частотных характеристик
Учтем, что
а значит
pnu = pnUmejwt = Um
6.1. Понятие частотных характеристик
Учтем, что
а значит
pnu = pnUmejwt = Um
Слайд 726.1. Понятие частотных характеристик
W(j ) есть комплексная функция, поэтому:
где P( ) -
6.1. Понятие частотных характеристик
W(j ) есть комплексная функция, поэтому:
где P( ) -
Слайд 736.1. Понятие частотных характеристик
В ТАУ широко используются логарифмические частотные характеристики (ЛЧХ) (рис.49):
6.1. Понятие частотных характеристик
В ТАУ широко используются логарифмические частотные характеристики (ЛЧХ) (рис.49):
Слайд 746.1. Понятие частотных характеристик
Так как мощность гармонического сигнала Р пропорциональна квадрату его
6.1. Понятие частотных характеристик
Так как мощность гармонического сигнала Р пропорциональна квадрату его
Слайд 756.2.1. Безынерционное звено
6.2.2. Интегрирующее звено
6.2.3. Апериодическое звено
6.2.4. Инерционные звенья второго
6.2.1. Безынерционное звено
6.2.2. Интегрирующее звено
6.2.3. Апериодическое звено
6.2.4. Инерционные звенья второго
Слайд 766.2.1. Безынерционное звено
Передаточная функция:
W(p) = k.
АФЧХ: W(j ) = k.
6.2.1. Безынерционное звено
Передаточная функция:
W(p) = k.
АФЧХ: W(j ) = k.
Слайд 776.2.2. Интегрирующее звено
Передаточная функция:
W(p) = k/p.
Рассмотрим частный случай, когда k =
6.2.2. Интегрирующее звено
Передаточная функция:
W(p) = k/p.
Рассмотрим частный случай, когда k =
Слайд 786.2.3. Апериодическое звено
При k = 1 получаем следующие выражения ЧХ:
Здесь A1
6.2.3. Апериодическое звено
При k = 1 получаем следующие выражения ЧХ:
Здесь A1
Слайд 796.2.3. Апериодическое звено
ЧХ показаны на рис.52. АФЧХ есть полуокружность радиусом 1/2 с
6.2.3. Апериодическое звено
ЧХ показаны на рис.52. АФЧХ есть полуокружность радиусом 1/2 с
Слайд 806.2.4. Инерционные звенья второго порядка
При k = 1 передаточная функция звена:
В
6.2.4. Инерционные звенья второго порядка
При k = 1 передаточная функция звена:
В
Слайд 816.2.5. Правила построения ЧХ элементарных звеньев
При построении ЧХ некоторых звеньев можно использовать
6.2.5. Правила построения ЧХ элементарных звеньев
При построении ЧХ некоторых звеньев можно использовать
 Движение - это жизнь
Движение - это жизнь Архитектура Древнего Египта
Архитектура Древнего Египта Проектная деятельность учащихся
Проектная деятельность учащихся Modern Russian Public Discourse: Do Changes in Information Technology Lead to New Discourse Strategies, or to New Worldview?
Modern Russian Public Discourse: Do Changes in Information Technology Lead to New Discourse Strategies, or to New Worldview? Как составить идеальный график отпусков на 2021 год
Как составить идеальный график отпусков на 2021 год Буквенные выражения 2 класс
Буквенные выражения 2 класс Анализ бюджета телекомпании ВИД
Анализ бюджета телекомпании ВИД Проверка и калибровка комплектов регулирования температур
Проверка и калибровка комплектов регулирования температур Модель Леонтьева многоотраслевой экономики
Модель Леонтьева многоотраслевой экономики Цветкова Ирина Георгиевна
Цветкова Ирина Георгиевна Возраст для школы или школа для возраста
Возраст для школы или школа для возраста Еңбекті қорғау нормаларын бұзған үшін жауапкершілік
Еңбекті қорғау нормаларын бұзған үшін жауапкершілік Курс предназначен для учителей школ (вне зависимости от преподаваемого предмета), специалистов методических служб, других категор
Курс предназначен для учителей школ (вне зависимости от преподаваемого предмета), специалистов методических служб, других категор Презентация на тему Словообразование в английском языке
Презентация на тему Словообразование в английском языке Росиия родина моя
Росиия родина моя Моё увлечение: Оловянные солдатики
Моё увлечение: Оловянные солдатики ТУЛАСТРОЙКОМ
ТУЛАСТРОЙКОМ Презентация на тему История парламента России
Презентация на тему История парламента России  Эмоционально-чувственные процессы: страх и ужас
Эмоционально-чувственные процессы: страх и ужас Художник и ученый (9 класс)
Художник и ученый (9 класс) Гигиенические требования к организации обучения детей 6-летнего возраста
Гигиенические требования к организации обучения детей 6-летнего возраста ООО «ЛенКадастр»
ООО «ЛенКадастр» перевірка знань з теми 3 (1)
перевірка знань з теми 3 (1) Презентация на тему Вирусы, друзья и враги
Презентация на тему Вирусы, друзья и враги Tiešā pārdošana
Tiešā pārdošana ПРИНТЕРЫ
ПРИНТЕРЫ Восстание Спартака в 74 – 71 гг.до н.э
Восстание Спартака в 74 – 71 гг.до н.э Связь языка и мышления
Связь языка и мышления