Всероссийский форум научной молодежи Шаг в будущее. Телеуправляемый необитаемый подводный аппарат К-2
- Всероссийский форум научной молодежи Шаг в будущее. Телеуправляемый необитаемый подводный аппарат К-2

Содержание
- 2. Цель работы: Собрать рабочий макет необитаемого подводного (НПА) аппарата К-2 и произвести его испытание. Цель работы:
- 3. Задачи: 1. По литературным источникам изучить и обобщить информацию о имеющихся телеуправляемых необитаемых подводных аппаратах (ТНПА).
- 4. Актуальность работы: В настоящее время для работы на мелководье в акватории Черного моря не существует необитаемого
- 5. Новизна работы: Новизна работы заключается в предложенной в ходе исследований усовершенствованной рабочей модели ТНПА К-2, собранной
- 6. За последние 30 лет в различных странах, занимающих ведущее положение в области морских технологий, было создано
- 7. Основные достоинства беспилотных или необитаемых подводных аппаратов: отсутствие на борту оператора, что обеспечивает оператору безопасность, нет
- 8. . В г. Геленджике сложилась исторически благоприятная ситуация по развитию направления разработки и создания коммерческих вариантов
- 9. Sea Perch Sea Perch – американская программа, в которую по привлечению школьников к инженерному делу и
- 10. Этапы сборки:
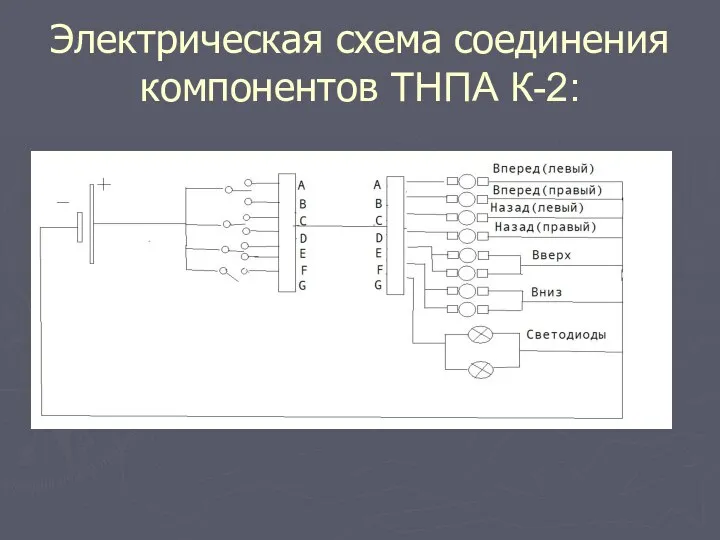
- 11. Электрическая схема соединения компонентов ТНПА К-2:
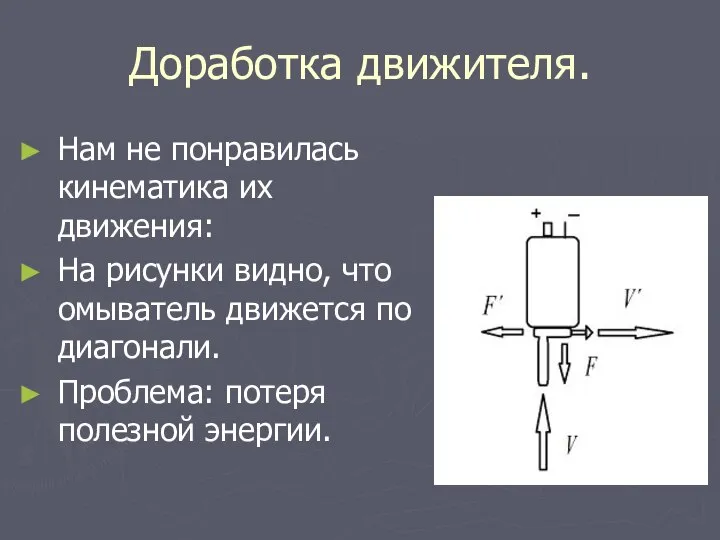
- 12. Доработка движителя. Нам не понравилась кинематика их движения: На рисунки видно, что омыватель движется по диагонали.
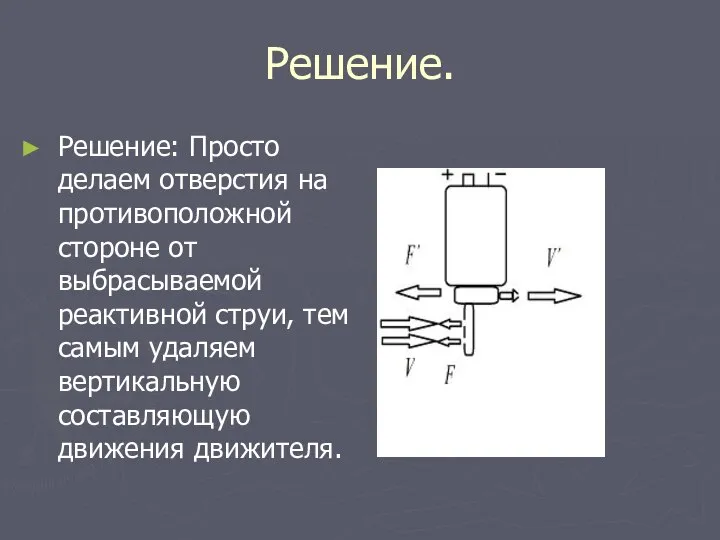
- 13. Решение. Решение: Просто делаем отверстия на противоположной стороне от выбрасываемой реактивной струи, тем самым удаляем вертикальную
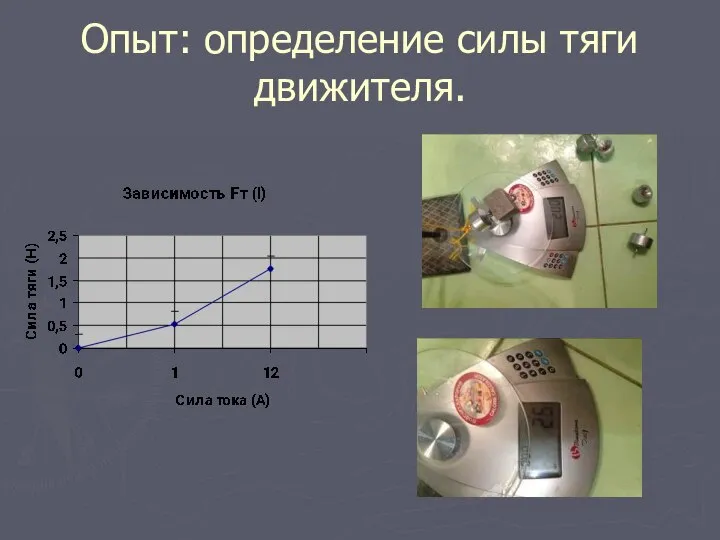
- 14. Опыт: определение силы тяги движителя.
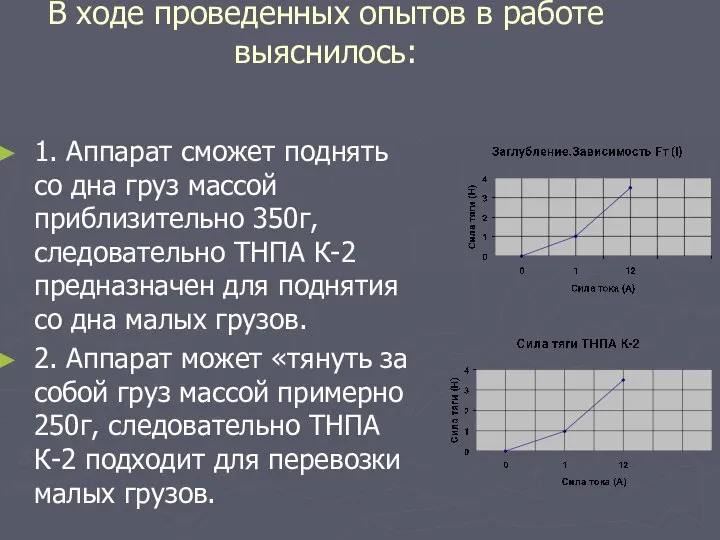
- 15. В ходе проведенных опытов в работе выяснилось: 1. Аппарат сможет поднять со дна груз массой приблизительно
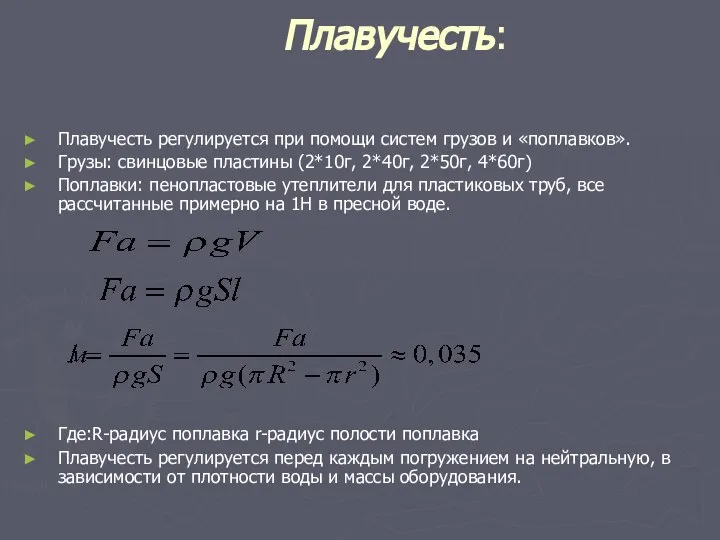
- 16. Плавучесть: Плавучесть регулируется при помощи систем грузов и «поплавков». Грузы: свинцовые пластины (2*10г, 2*40г, 2*50г, 4*60г)
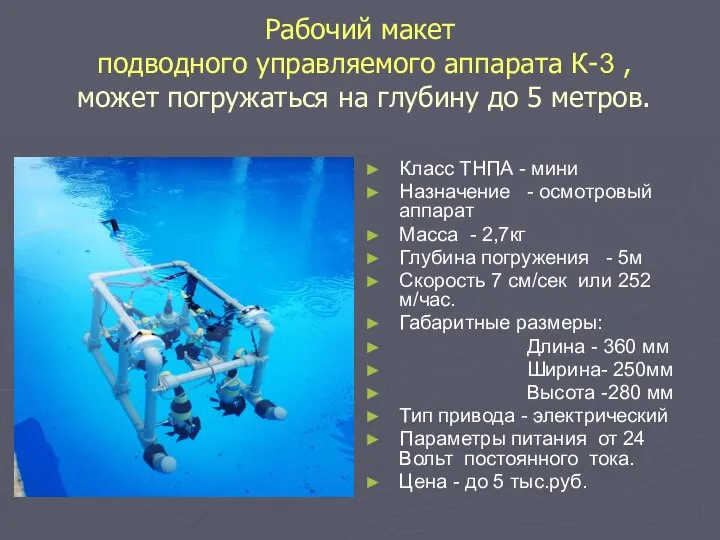
- 17. Рабочий макет подводного управляемого аппарата К-2 , может погружаться на глубину до 5 метров. Класс ТНПА
- 18. На консультации в МЧС у начальника отдела робототехники.
- 19. Доработка движителя на К-3
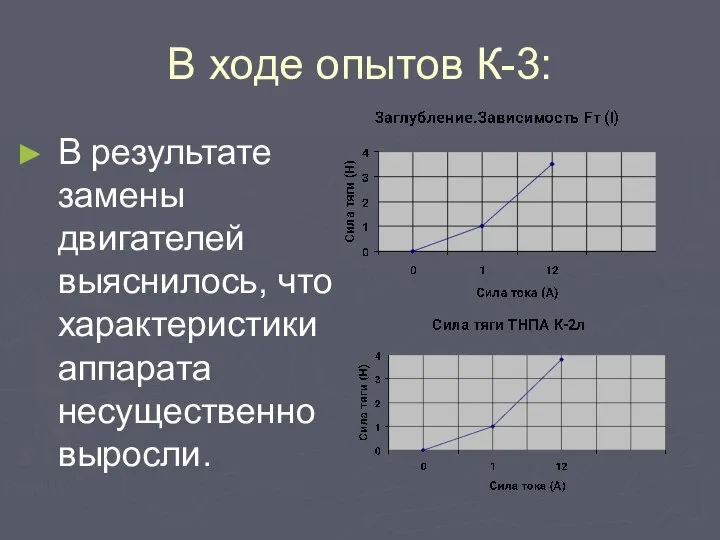
- 20. В ходе опытов К-3: В результате замены двигателей выяснилось, что характеристики аппарата несущественно выросли.
- 21. Электрическая схема соединения компонентов ТНПА К-3
- 22. Рабочий макет подводного управляемого аппарата К-3 , может погружаться на глубину до 5 метров. Класс ТНПА
- 23. Особенности ТНПА К-2(3) ТНПА «К-2(3)» относится к классу осмотровых аппаратов, отличается малыми габаритами и малой массой
- 24. Достоинства аппарата К-2(3) : Данный аппарат может выполнять различные работы на мелководье, такие как: - осмотр
- 25. Выводы: В ходе исследований было установлено, что ТНПА К-2(3) следующие достоинства: 1) аппарат легок в изготовлении
- 26. Выводы: Рабочий макет необитаемого подводного аппарата (НПА) К-2(3) собран и испытан в бассейне. Рабочий макет (1
- 27. Доработка предполагает: -установку дополнительных приборов эхолота, металлоискателя, манипулятора, специальной подводной телефото камеры, грузового отсека; -разработки телеметрии
- 28. СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ: Илларионов Г. Ю. Необитаемые подводные аппараты и их системы. Владивосток: Изд.-во Дальневост. ун-та,
- 30. Скачать презентацию
Слайд 2Цель работы:
Собрать рабочий макет необитаемого подводного (НПА) аппарата К-2 и произвести его
Цель работы:
Собрать рабочий макет необитаемого подводного (НПА) аппарата К-2 и произвести его
Слайд 3Задачи:
1. По литературным источникам изучить и обобщить информацию о имеющихся телеуправляемых необитаемых
Задачи:
1. По литературным источникам изучить и обобщить информацию о имеющихся телеуправляемых необитаемых
Слайд 4 Актуальность работы:
В настоящее время для работы на мелководье в акватории Черного
Актуальность работы:
В настоящее время для работы на мелководье в акватории Черного
Слайд 5Новизна работы:
Новизна работы заключается в предложенной в ходе исследований усовершенствованной рабочей
Новизна работы:
Новизна работы заключается в предложенной в ходе исследований усовершенствованной рабочей
Слайд 6За последние 30 лет в различных странах, занимающих ведущее положение в области
За последние 30 лет в различных странах, занимающих ведущее положение в области
Слайд 7Основные достоинства беспилотных или необитаемых подводных аппаратов:
отсутствие на борту
Основные достоинства беспилотных или необитаемых подводных аппаратов:
отсутствие на борту
Слайд 8.
В г. Геленджике сложилась исторически благоприятная ситуация по развитию направления разработки
. В г. Геленджике сложилась исторически благоприятная ситуация по развитию направления разработки
Слайд 9Sea Perch
Sea Perch – американская программа, в которую по привлечению школьников к
Sea Perch
Sea Perch – американская программа, в которую по привлечению школьников к
Слайд 10Этапы сборки:
Этапы сборки:

Слайд 11Электрическая схема соединения компонентов ТНПА К-2:
Электрическая схема соединения компонентов ТНПА К-2:
Слайд 12Доработка движителя.
Нам не понравилась кинематика их движения:
На рисунки видно, что омыватель движется
Доработка движителя.
Нам не понравилась кинематика их движения:
На рисунки видно, что омыватель движется
Слайд 13Решение.
Решение: Просто делаем отверстия на противоположной стороне от выбрасываемой реактивной струи, тем
Решение.
Решение: Просто делаем отверстия на противоположной стороне от выбрасываемой реактивной струи, тем
Слайд 14Опыт: определение силы тяги движителя.
Опыт: определение силы тяги движителя.
Слайд 15В ходе проведенных опытов в работе выяснилось:
1. Аппарат сможет поднять со дна
В ходе проведенных опытов в работе выяснилось:
1. Аппарат сможет поднять со дна
Слайд 16Плавучесть:
Плавучесть регулируется при помощи систем грузов и «поплавков».
Грузы: свинцовые пластины (2*10г, 2*40г,
Плавучесть:
Плавучесть регулируется при помощи систем грузов и «поплавков».
Грузы: свинцовые пластины (2*10г, 2*40г,
Слайд 17Рабочий макет подводного управляемого аппарата К-2 ,
может погружаться на глубину до
Рабочий макет подводного управляемого аппарата К-2 , может погружаться на глубину до

Слайд 18На консультации в МЧС
у начальника отдела робототехники.
На консультации в МЧС
у начальника отдела робототехники.

Слайд 19Доработка движителя на К-3
Доработка движителя на К-3

Слайд 20В ходе опытов К-3:
В результате замены двигателей выяснилось, что характеристики аппарата несущественно
В ходе опытов К-3:
В результате замены двигателей выяснилось, что характеристики аппарата несущественно
Слайд 21Электрическая схема соединения компонентов ТНПА К-3
Электрическая схема соединения компонентов ТНПА К-3

Слайд 22Рабочий макет подводного управляемого аппарата К-3 ,
может погружаться на глубину до
Рабочий макет подводного управляемого аппарата К-3 , может погружаться на глубину до
Слайд 23Особенности ТНПА К-2(3)
ТНПА «К-2(3)» относится к классу осмотровых аппаратов, отличается малыми
Особенности ТНПА К-2(3)
ТНПА «К-2(3)» относится к классу осмотровых аппаратов, отличается малыми
Слайд 24Достоинства аппарата К-2(3) :
Данный аппарат может выполнять различные работы на мелководье, такие
Достоинства аппарата К-2(3) :
Данный аппарат может выполнять различные работы на мелководье, такие
Слайд 25Выводы:
В ходе исследований было установлено, что ТНПА К-2(3) следующие достоинства:
1) аппарат
Выводы:
В ходе исследований было установлено, что ТНПА К-2(3) следующие достоинства:
1) аппарат
Слайд 26Выводы:
Рабочий макет необитаемого подводного аппарата (НПА) К-2(3) собран и испытан в бассейне.
Рабочий
Выводы:
Рабочий макет необитаемого подводного аппарата (НПА) К-2(3) собран и испытан в бассейне.
Рабочий
Слайд 27Доработка предполагает:
-установку дополнительных приборов эхолота, металлоискателя, манипулятора, специальной подводной телефото камеры, грузового
Доработка предполагает:
-установку дополнительных приборов эхолота, металлоискателя, манипулятора, специальной подводной телефото камеры, грузового
Слайд 28СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ:
Илларионов Г. Ю. Необитаемые подводные аппараты и их системы.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ:
Илларионов Г. Ю. Необитаемые подводные аппараты и их системы.
 Недвижимость. Торги, лот №3, г. Хабаровск
Недвижимость. Торги, лот №3, г. Хабаровск СЧАСТЛИВОГО ПУТИ !!!
СЧАСТЛИВОГО ПУТИ !!! Русь и Золотая Орда
Русь и Золотая Орда Project template (1)
Project template (1) Системно - деятельностный подход в обучении
Системно - деятельностный подход в обучении Subkulturе Hippie
Subkulturе Hippie Основы представлений о выражении в образах искусства нравственного поиска человечества
Основы представлений о выражении в образах искусства нравственного поиска человечества Миокардиты
Миокардиты как выучить с ребенком стихотворение
как выучить с ребенком стихотворение Презентация на тему кровь
Презентация на тему кровь Родителям о деструктивном поведении подростков
Родителям о деструктивном поведении подростков Магистерская программа «Национальные и федеративные отношения» по направлению 081100.68 «Государственное и муниципальное управлени
Магистерская программа «Национальные и федеративные отношения» по направлению 081100.68 «Государственное и муниципальное управлени Портфолио Д.П.Ермаковой
Портфолио Д.П.Ермаковой Антикризисная стратегия: основные практические аспекты и типовые ошибки
Антикризисная стратегия: основные практические аспекты и типовые ошибки рабочий пк
рабочий пк London
London 4,6.10
4,6.10 Бухгалтерская (финансовая) отчетность. Отчет об изменениях капитала. Лекция 5
Бухгалтерская (финансовая) отчетность. Отчет об изменениях капитала. Лекция 5 Россия на пути перехода от административно-командной экономики к рынку
Россия на пути перехода от административно-командной экономики к рынку Личные инвестиции: делаем правильный выбор
Личные инвестиции: делаем правильный выбор Семьеведение
Семьеведение Презентация на тему Электромагнитная индукция
Презентация на тему Электромагнитная индукция Прямое и переносное значение слов
Прямое и переносное значение слов Н.В. Гоголь «Женитьба»
Н.В. Гоголь «Женитьба» Положительные и отрицательные числа
Положительные и отрицательные числа Местоимение (3 класс)
Местоимение (3 класс) Иврит с удовольствием
Иврит с удовольствием Петр Великий русской литературы 10 класс
Петр Великий русской литературы 10 класс