- Биомеханика. Цели и задачи учебного блока

Содержание
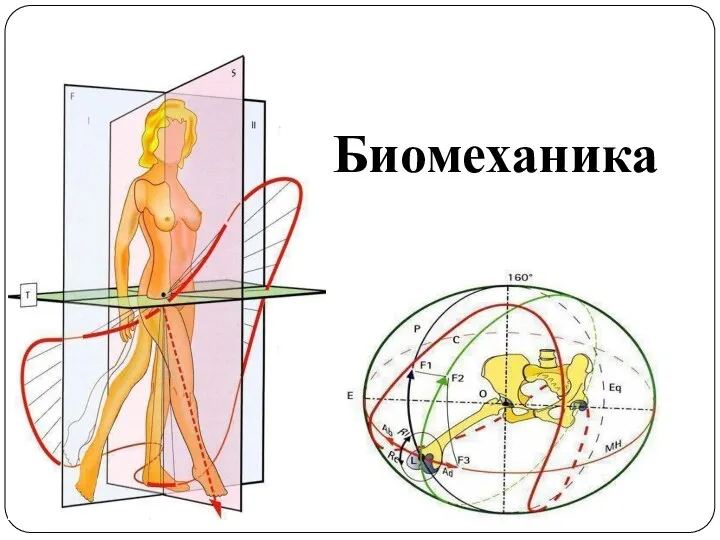
- 2. Биомеханика
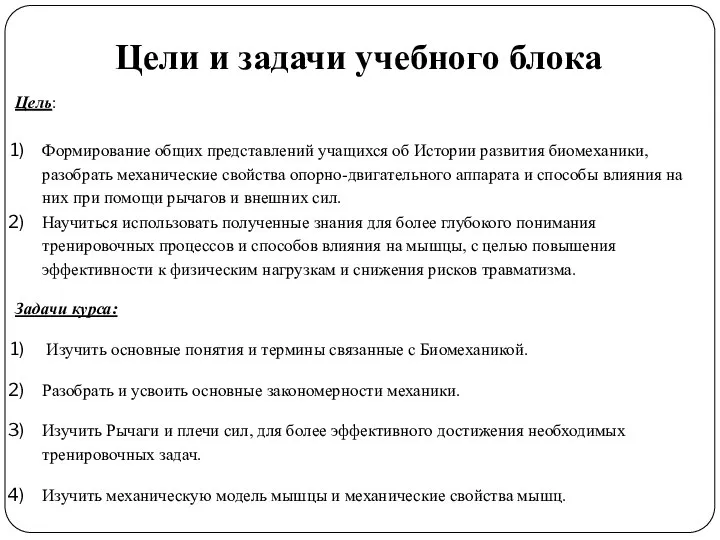
- 3. Цели и задачи учебного блока Цель: Формирование общих представлений учащихся об Истории развития биомеханики, разобрать механические
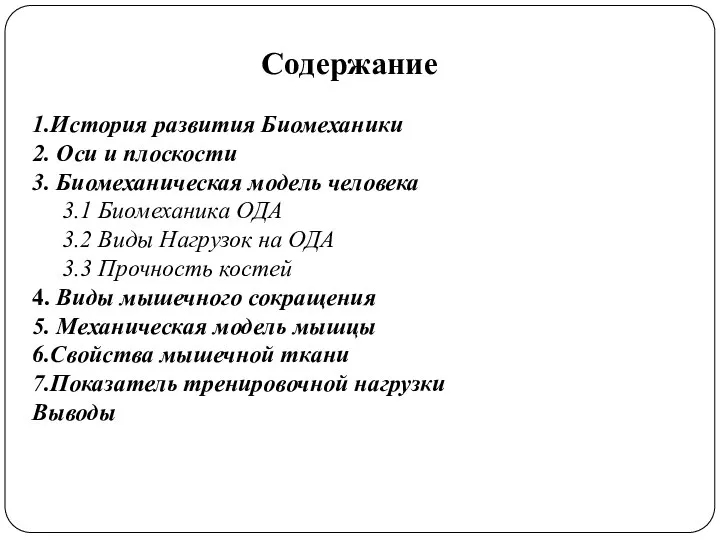
- 4. 1.История развития Биомеханики 2. Оси и плоскости 3. Биомеханическая модель человека 3.1 Биомеханика ОДА 3.2 Виды
- 5. Биомеханика – смежная наука, на «стыке» двух наук: Биологии – науки о жизни Механики – науки
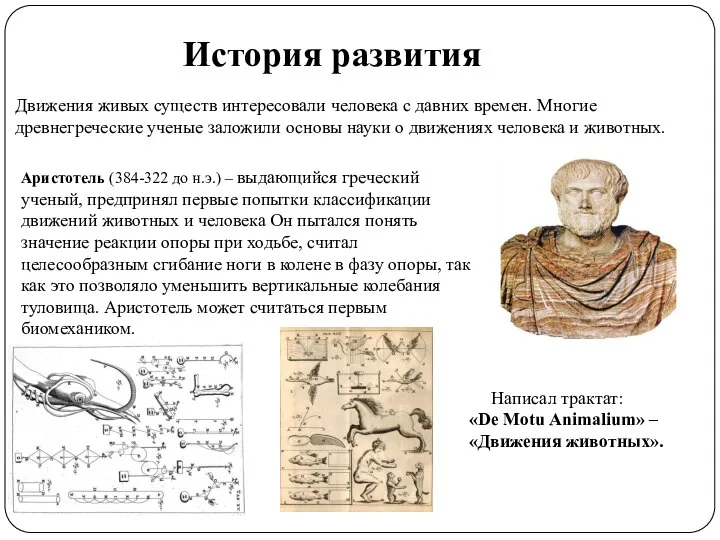
- 6. Движения живых существ интересовали человека с давних времен. Многие древнегреческие ученые заложили основы науки о движениях
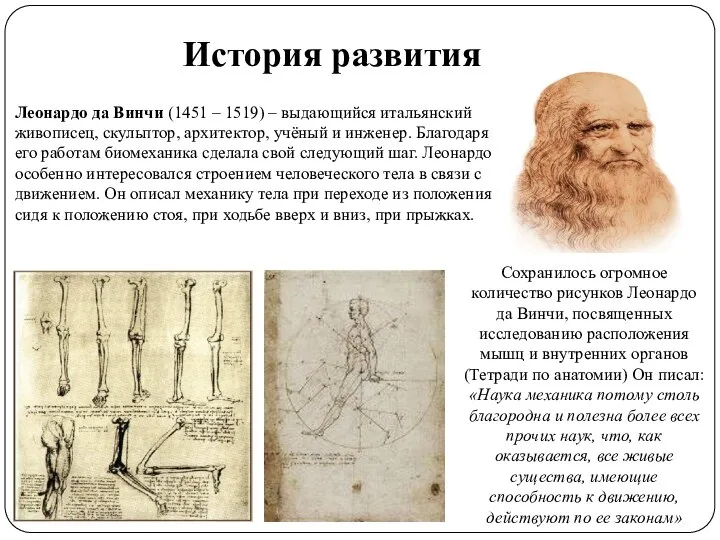
- 7. Леонардо да Винчи (1451 – 1519) – выдающийся итальянский живописец, скульптор, архитектор, учёный и инженер. Благодаря
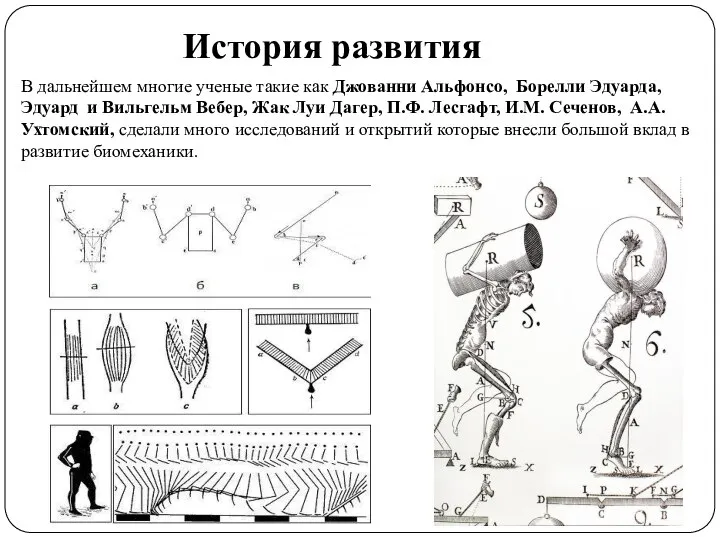
- 8. В дальнейшем многие ученые такие как Джованни Альфонсо, Борелли Эдуарда, Эдуард и Вильгельм Вебер, Жак Луи
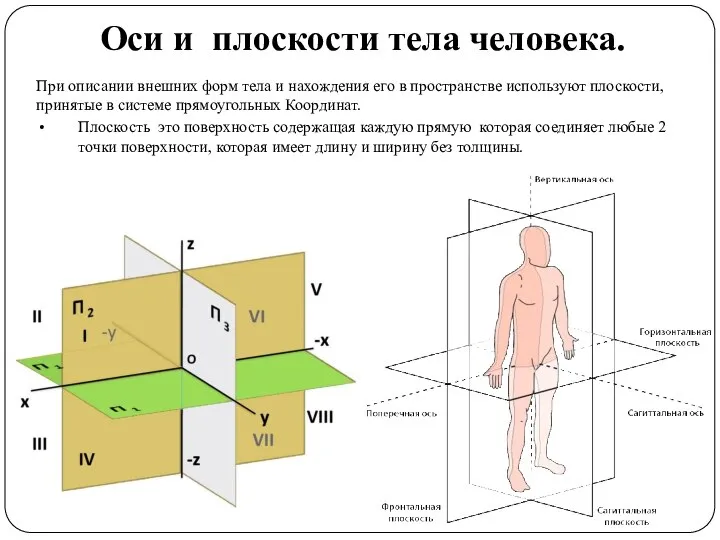
- 9. Оси и плоскости тела человека. При описании внешних форм тела и нахождения его в пространстве используют
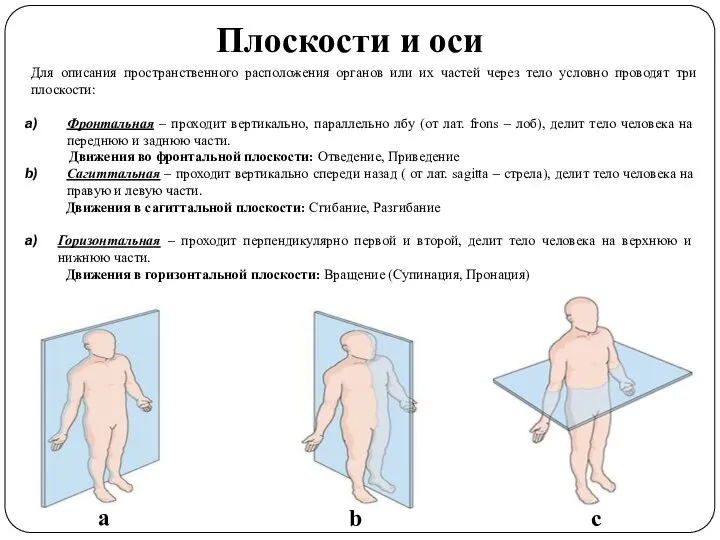
- 10. Для описания пространственного расположения органов или их частей через тело условно проводят три плоскости: Фронтальная –
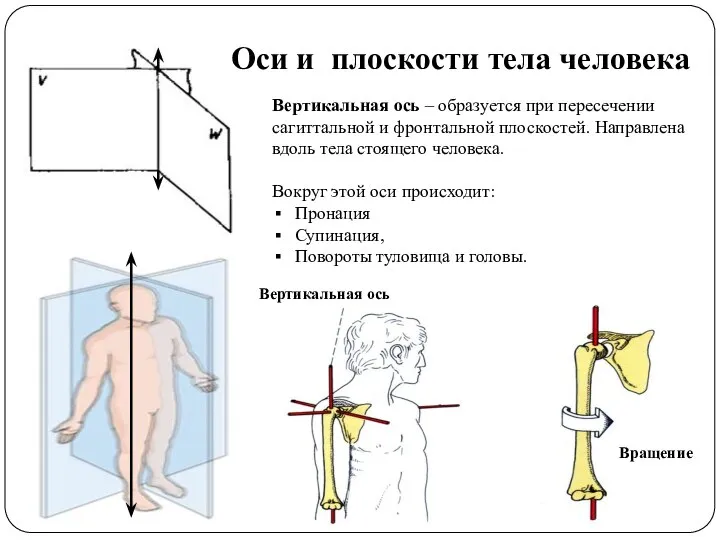
- 11. Вертикальная ось – образуется при пересечении сагиттальной и фронтальной плоскостей. Направлена вдоль тела стоящего человека. Вокруг
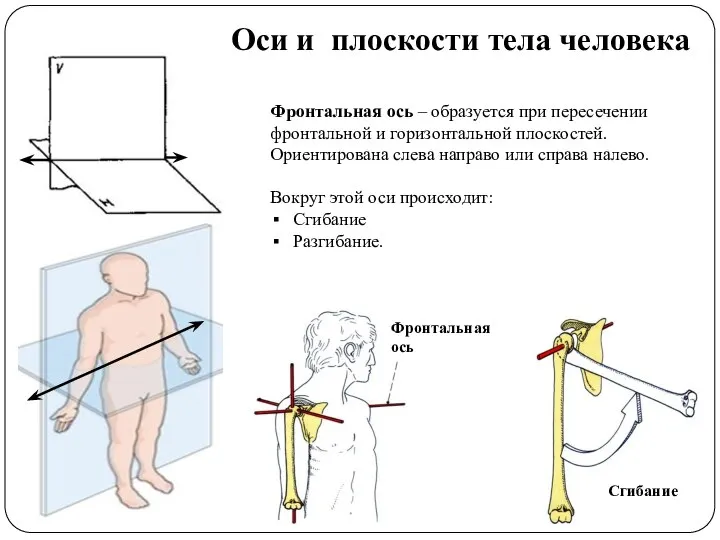
- 12. Фронтальная ось Сгибание Фронтальная ось – образуется при пересечении фронтальной и горизонтальной плоскостей. Ориентирована слева направо
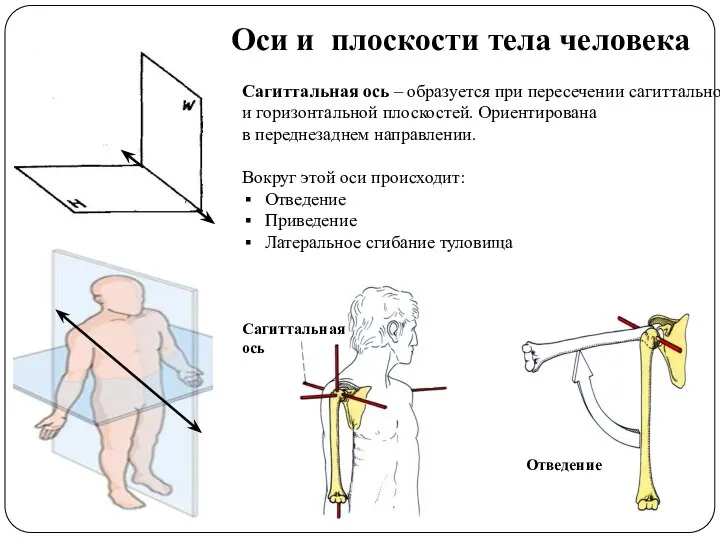
- 13. Сагиттальная ось – образуется при пересечении сагиттальной и горизонтальной плоскостей. Ориентирована в переднезаднем направлении. Вокруг этой
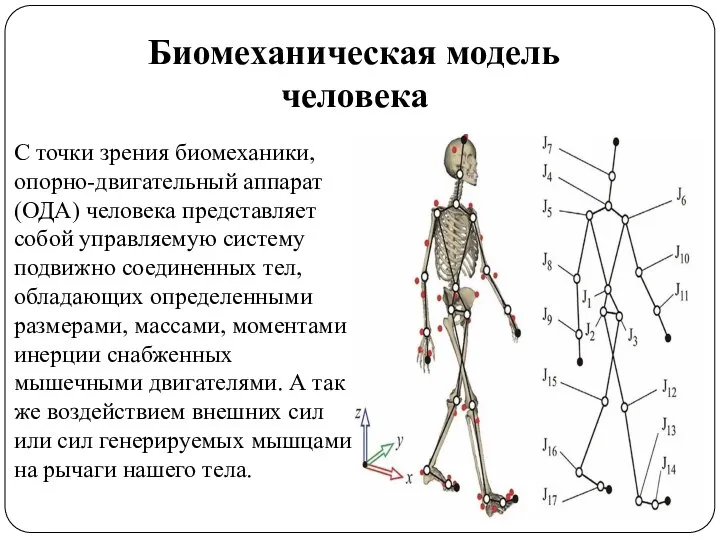
- 15. С точки зрения биомеханики, опорно-двигательный аппарат (ОДА) человека представляет собой управляемую систему подвижно соединенных тел, обладающих
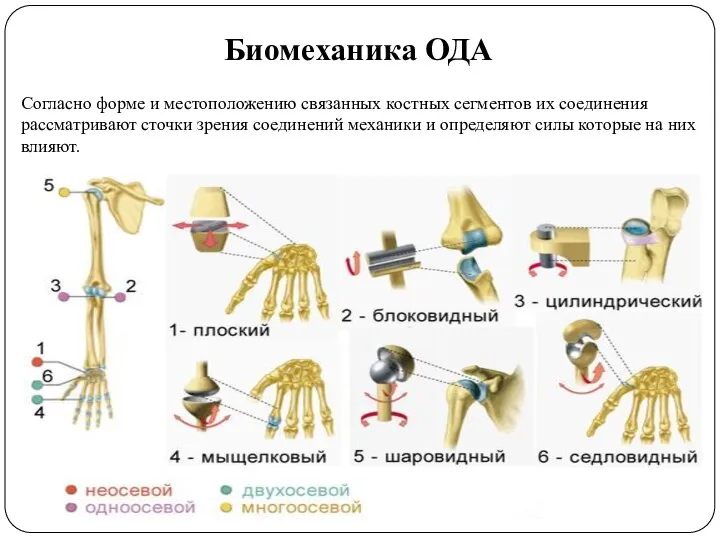
- 16. Согласно форме и местоположению связанных костных сегментов их соединения рассматривают сточки зрения соединений механики и определяют
- 17. Виды нагрузок на ОДА
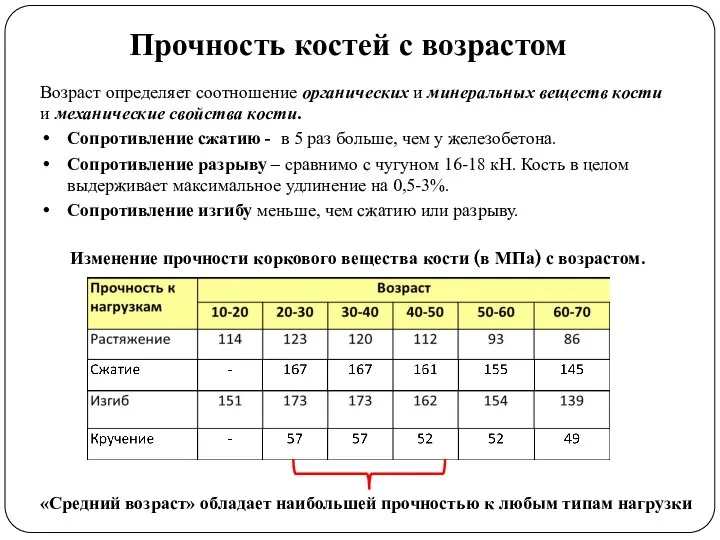
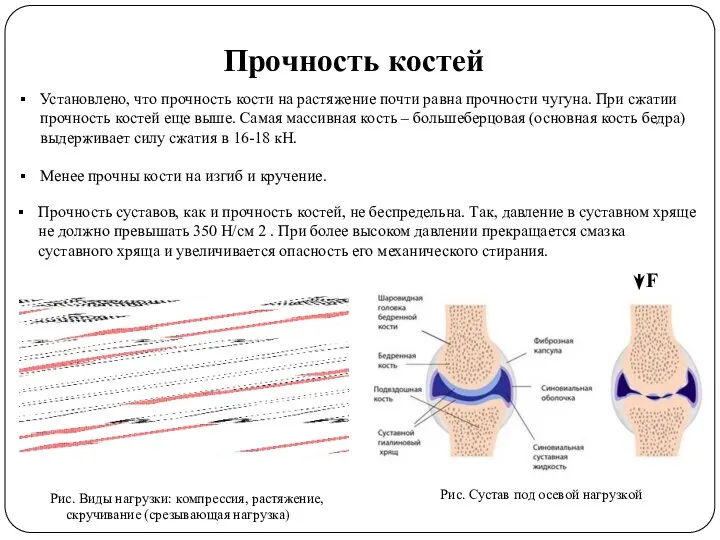
- 18. Возраст определяет соотношение органических и минеральных веществ кости и механические свойства кости. Сопротивление сжатию - в
- 19. Рис. Виды нагрузки: компрессия, растяжение, скручивание (срезывающая нагрузка) Прочность костей Прочность суставов, как и прочность костей,
- 20. Различают эластическую деформацию (обратимую деформацию кости) и пластическую (деформация, которая не исчезает после прекращения воздействия), которая
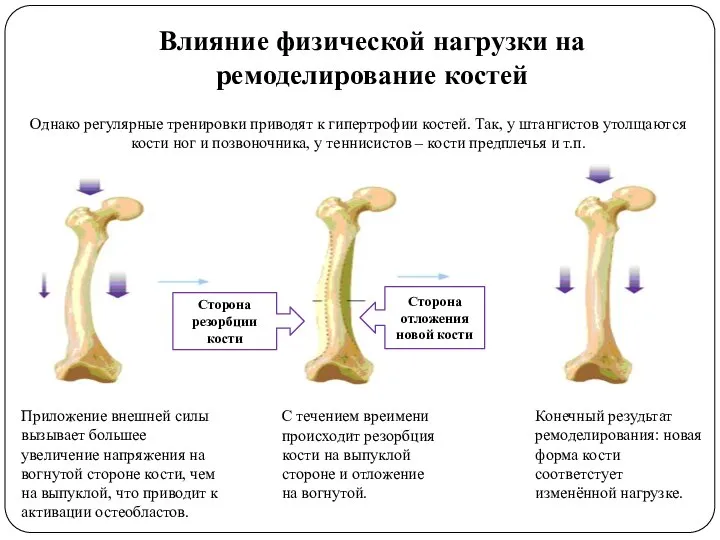
- 21. Влияние физической нагрузки на ремоделирование костей Сторона резорбции кости Сторона отложения новой кости Приложение внешней силы
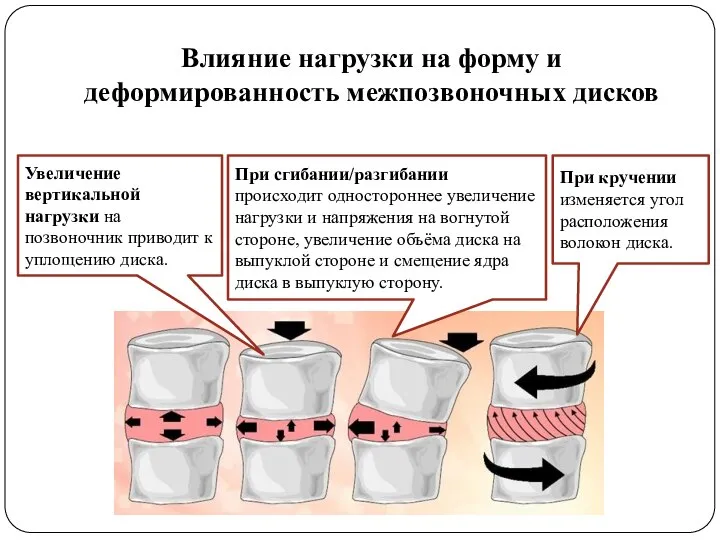
- 22. Увеличение вертикальной нагрузки на позвоночник приводит к уплощению диска. При сгибании/разгибании происходит одностороннее увеличение нагрузки и
- 23. Виды мышечного сокращения Динамический (Ауксотонический) Уступающий (Эксцентрический) Изометрический Преодолевающий (Концентрический) Школа эффективного фитнеса и управления “КОРУС”
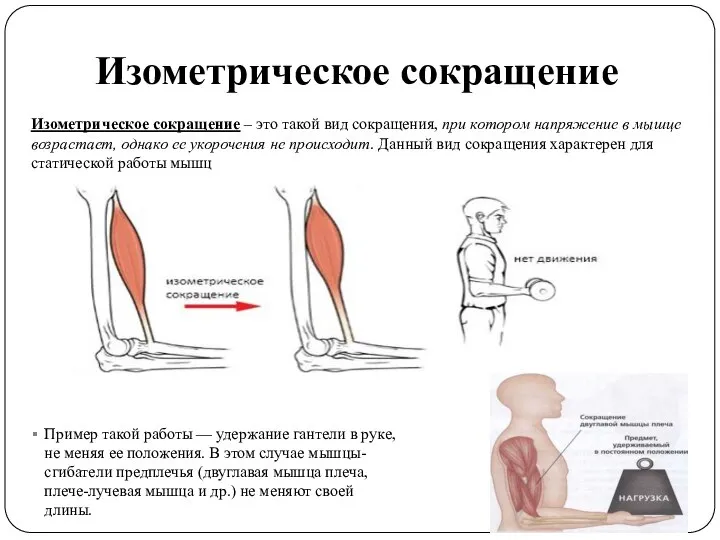
- 24. Изометрическое сокращение Пример такой работы — удержание гантели в руке, не меняя ее положения. В этом
- 25. Динамическое (Ауксотоническое) сокращение Динамическое или Ауксотоническое сокращение - при котором длина мышцы изменяется по мере увеличения
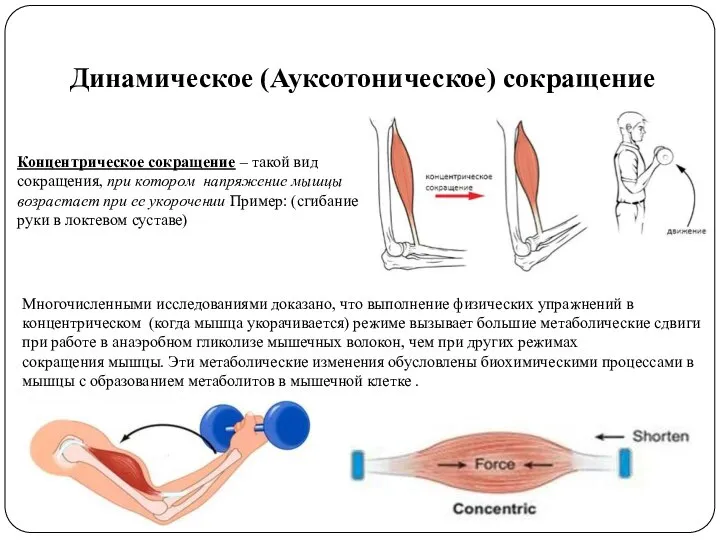
- 26. Динамическое (Ауксотоническое) сокращение Концентрическое сокращение – такой вид сокращения, при котором напряжение мышцы возрастает при ее
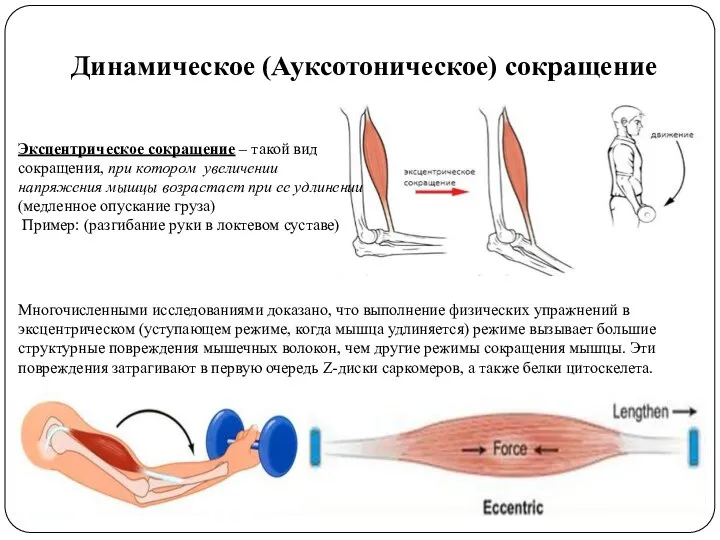
- 27. Многочисленными исследованиями доказано, что выполнение физических упражнений в эксцентрическом (уступающем режиме, когда мышца удлиняется) режиме вызывает
- 28. Изокинетическое сокращение Изокинетическое сокращение – это такой вид сокращения мышц, при котором сокращение происходит с постоянной
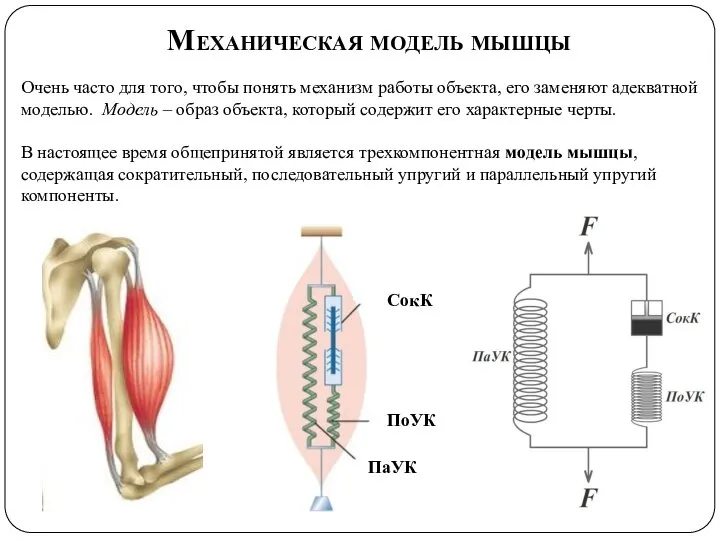
- 29. СокК ПоУК ПаУК Очень часто для того, чтобы понять механизм работы объекта, его заменяют адекватной моделью.
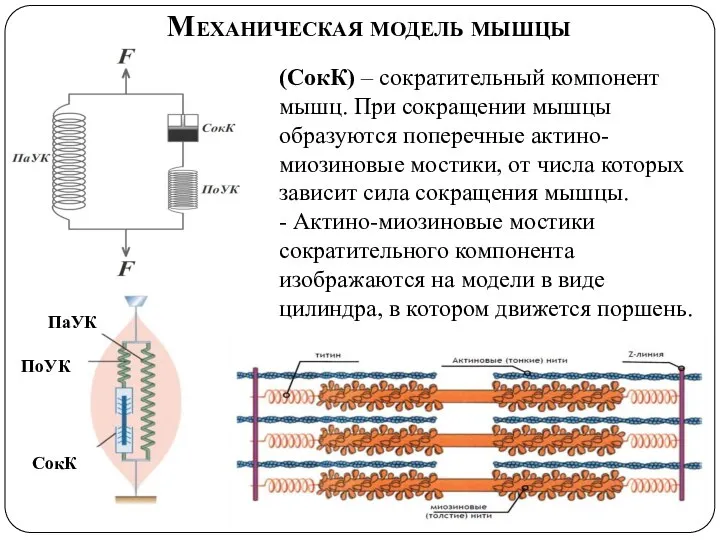
- 30. Механическая модель мышцы СокК ПоУК ПаУК (СокК) – сократительный компонент мышц. При сокращении мышцы образуются поперечные
- 31. Механическая модель мышцы СокК ПоУК ПаУК (ПаУК) – параллельно упругий компонент. Это соединительнотканные образования к которым
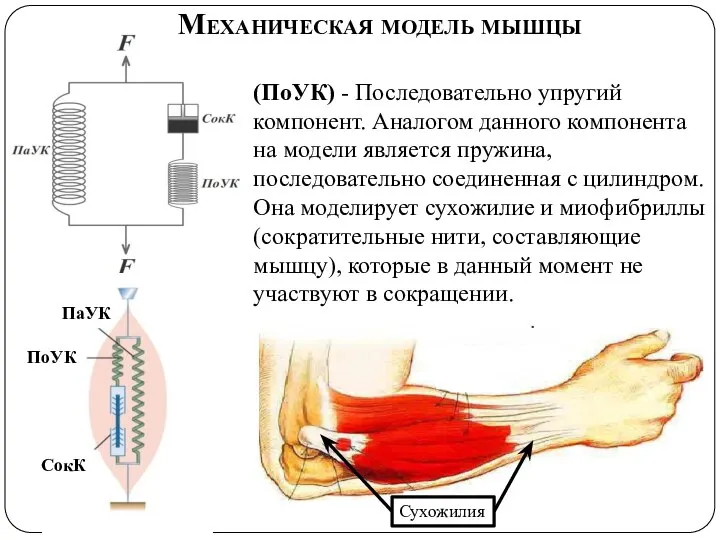
- 32. Механическая модель мышцы СокК ПоУК ПаУК (ПоУК) - Последовательно упругий компонент. Аналогом данного компонента на модели
- 33. Механические Свойства мышечной ткани Сократимость Жесткость Вязкость Релаксация
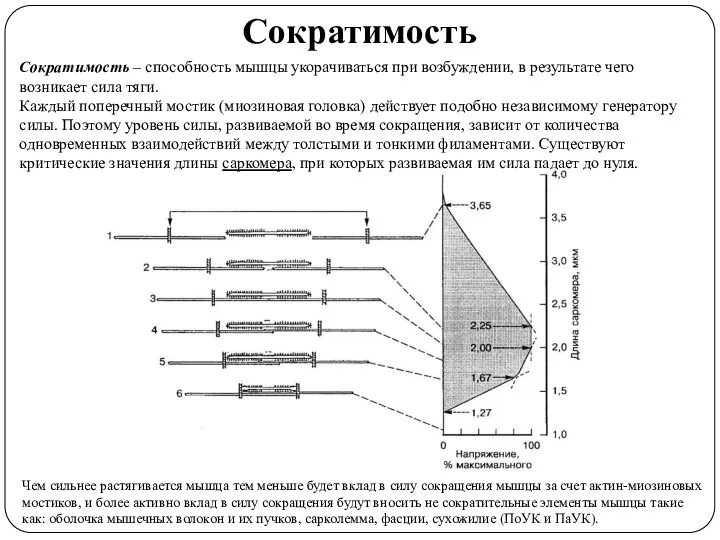
- 34. Сократимость – способность мышцы укорачиваться при возбуждении, в результате чего возникает сила тяги. Каждый поперечный мостик
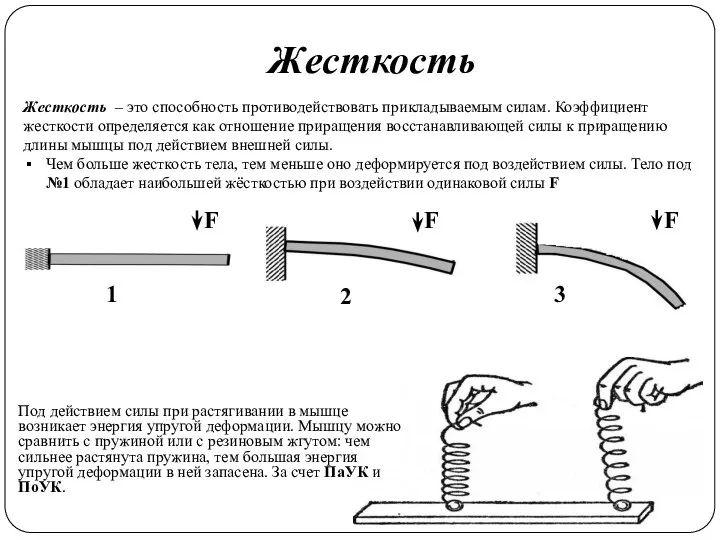
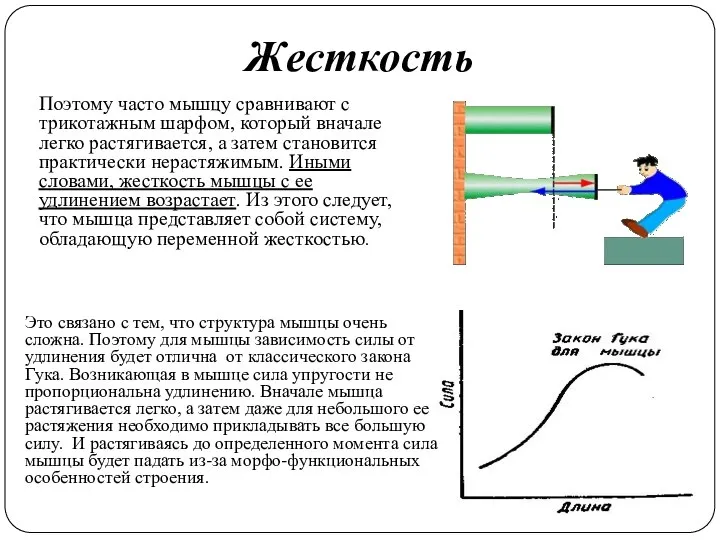
- 35. Жесткость – это способность противодействовать прикладываемым силам. Коэффициент жесткости определяется как отношение приращения восстанавливающей силы к
- 36. Это связано с тем, что структура мышцы очень сложна. Поэтому для мышцы зависимость силы от удлинения
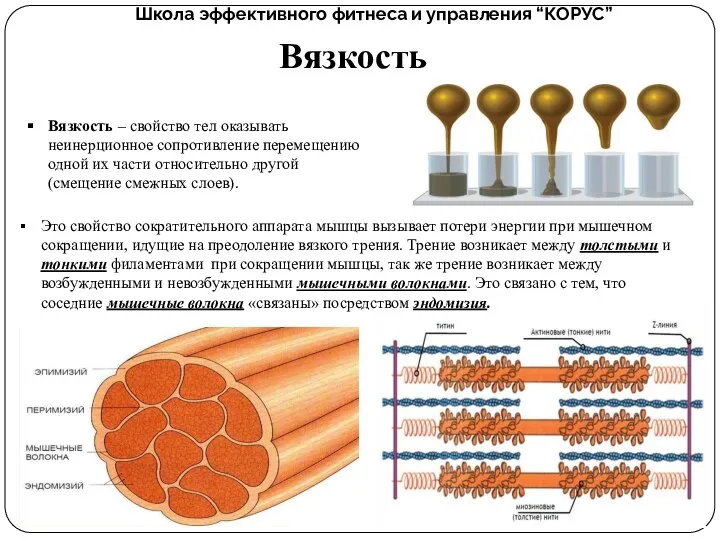
- 37. Вязкость – свойство тел оказывать неинерционное сопротивление перемещению одной их части относительно другой (смещение смежных слоев).
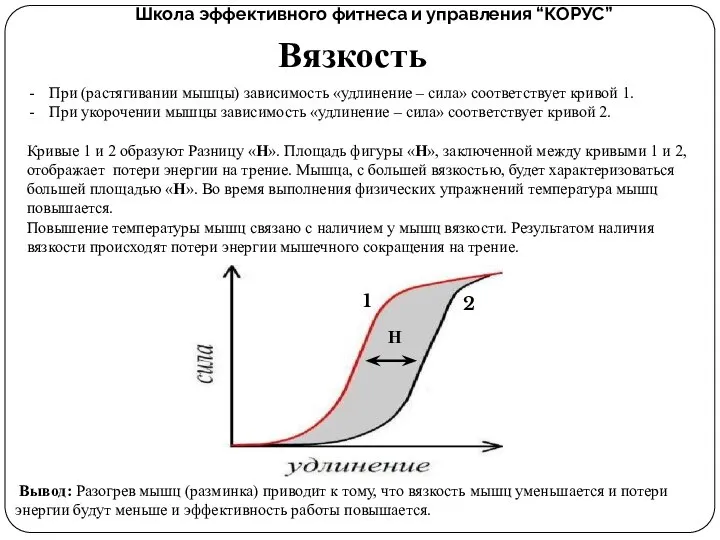
- 38. Н При (растягивании мышцы) зависимость «удлинение – сила» соответствует кривой 1. При укорочении мышцы зависимость «удлинение
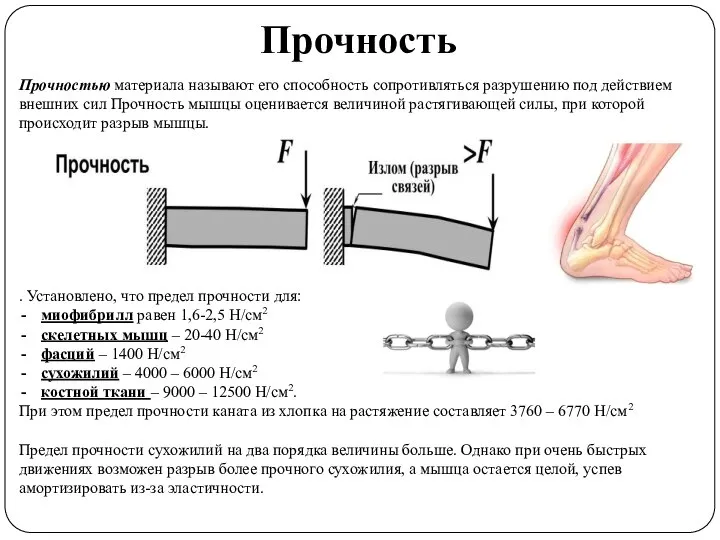
- 39. Прочностью материала называют его способность сопротивляться разрушению под действием внешних сил Прочность мышцы оценивается величиной растягивающей
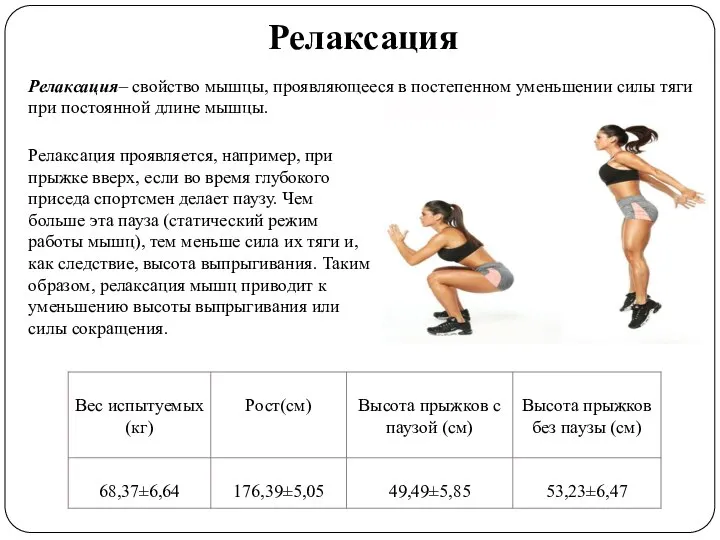
- 40. Релаксация– свойство мышцы, проявляющееся в постепенном уменьшении силы тяги при постоянной длине мышцы. Релаксация Релаксация проявляется,
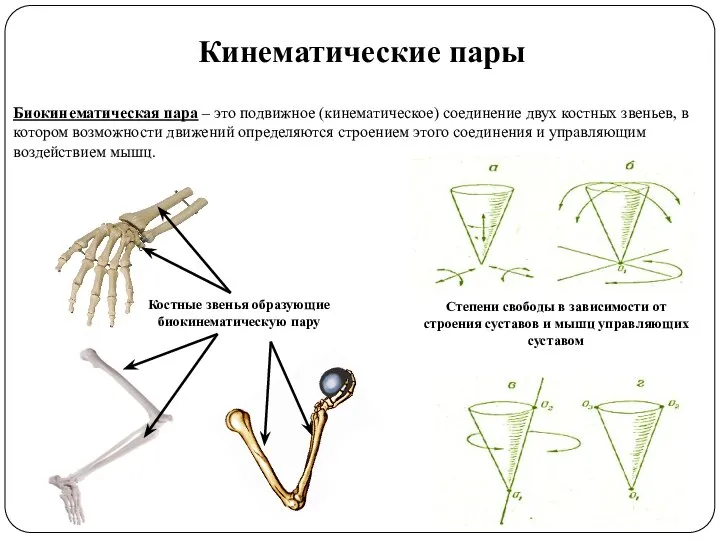
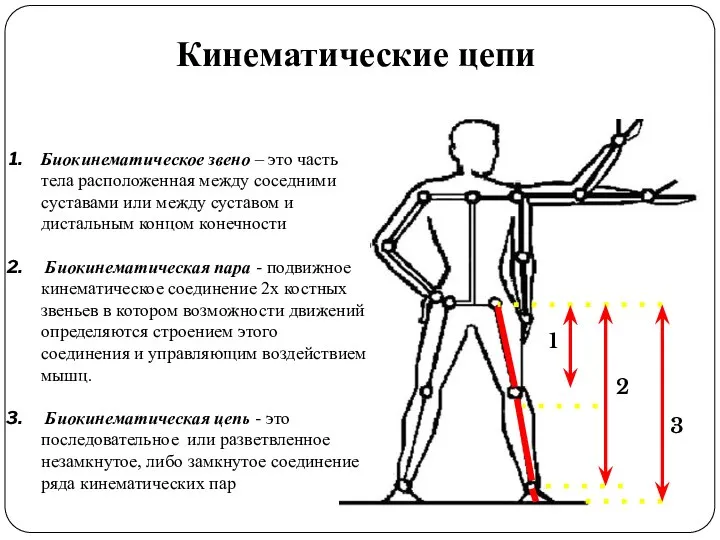
- 41. Биокинематическая пара – это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности движений определяются строением
- 42. Биокинематическая цепь – это последовательное (разветвленное) незамкнутое, либо замкнутое соединение ряда кинематических пар. И подразделяются на:
- 43. Цепь в которой конечное звено свободно, называют незамкнутой кинематической цепью. Движения в незамкнутых цепях характеризуются относительной
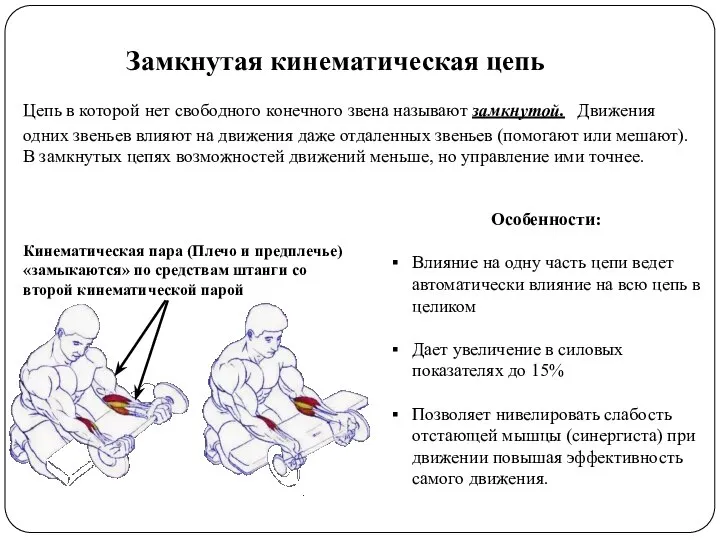
- 44. Кинематическая пара (Плечо и предплечье) «замыкаются» по средствам штанги со второй кинематической парой Особенности: Влияние на
- 45. 1 2 3 Биокинематическое звено – это часть тела расположенная между соседними суставами или между суставом
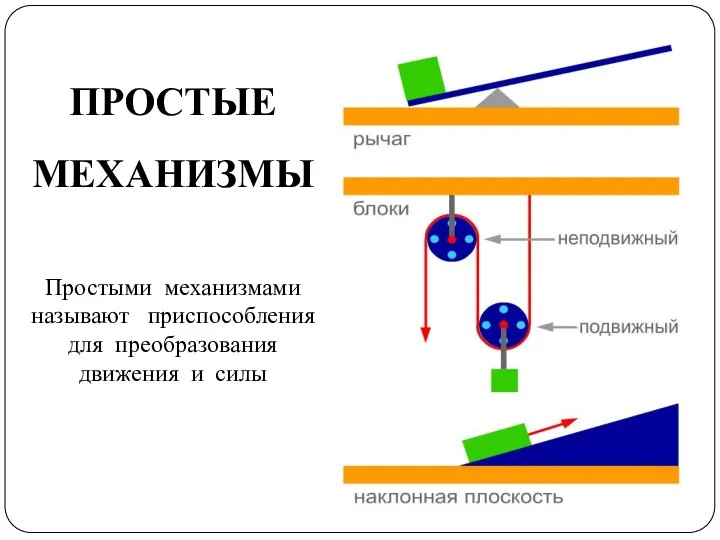
- 46. ПРОСТЫЕ МЕХАНИЗМЫ Простыми механизмами называют приспособления для преобразования движения и силы
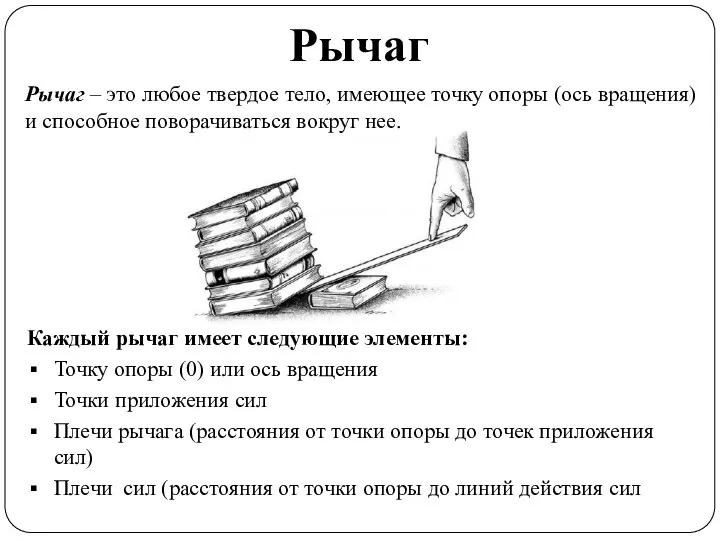
- 47. Каждый рычаг имеет следующие элементы: Точку опоры (0) или ось вращения Точки приложения сил Плечи рычага
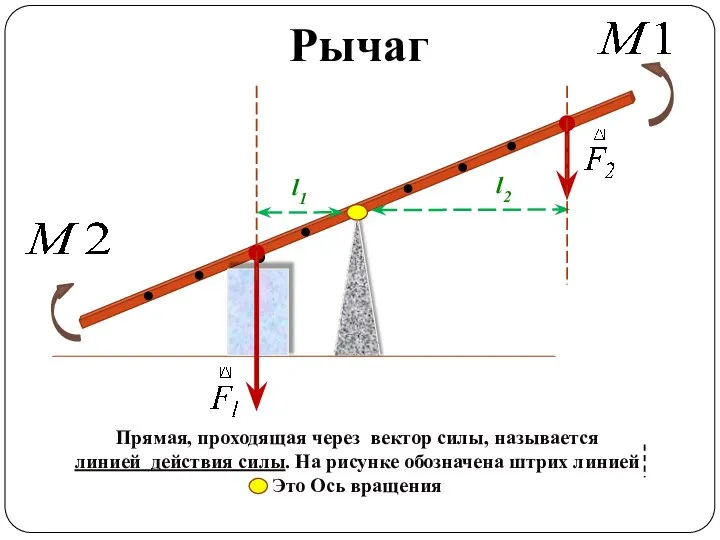
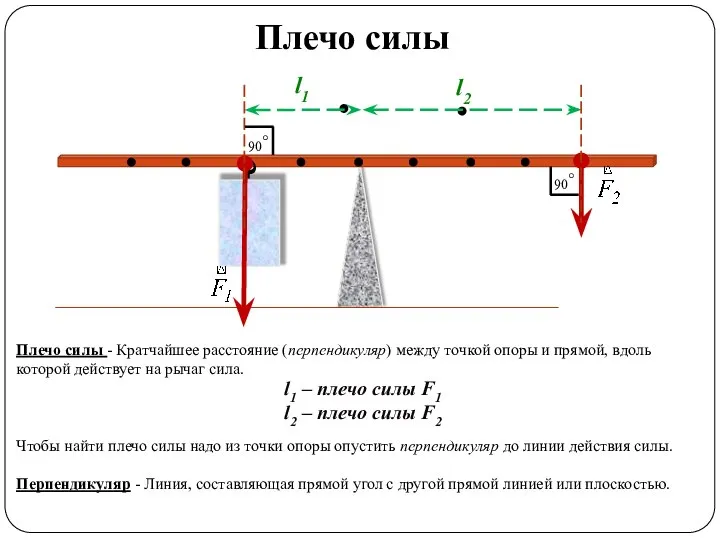
- 48. l1 l2 Прямая, проходящая через вектор силы, называется линией действия силы. На рисунке обозначена штрих линией
- 49. 90° 90° Плечо силы - Кратчайшее расстояние (перпендикуляр) между точкой опоры и прямой, вдоль которой действует
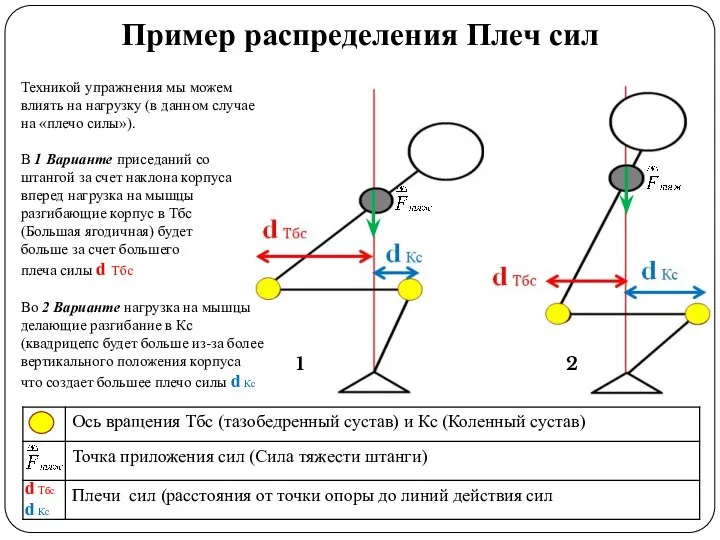
- 50. Техникой упражнения мы можем влиять на нагрузку (в данном случае на «плечо силы»). В 1 Варианте
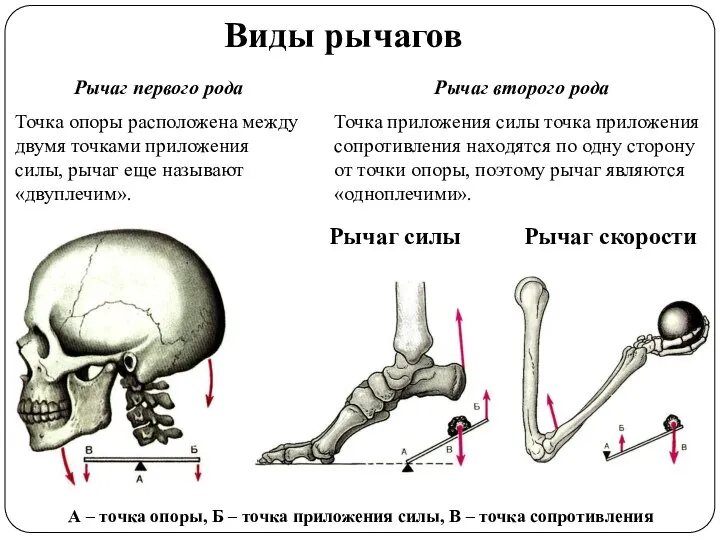
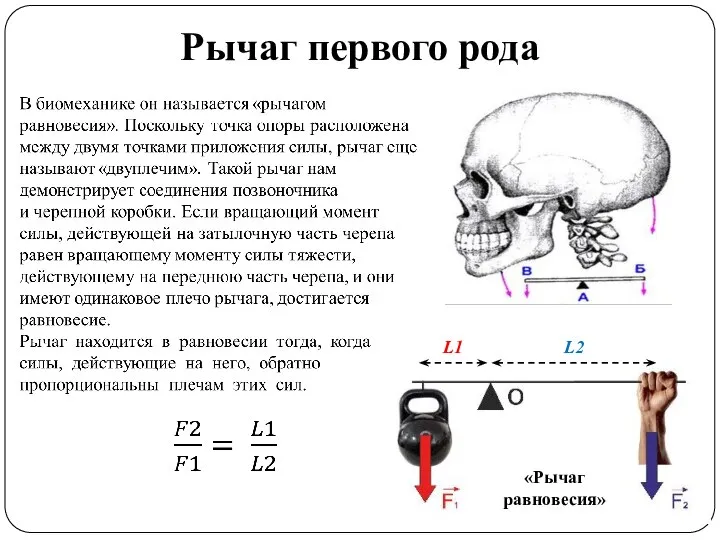
- 51. Виды рычагов Рычаг первого рода Точка опоры расположена между двумя точками приложения силы, рычаг еще называют
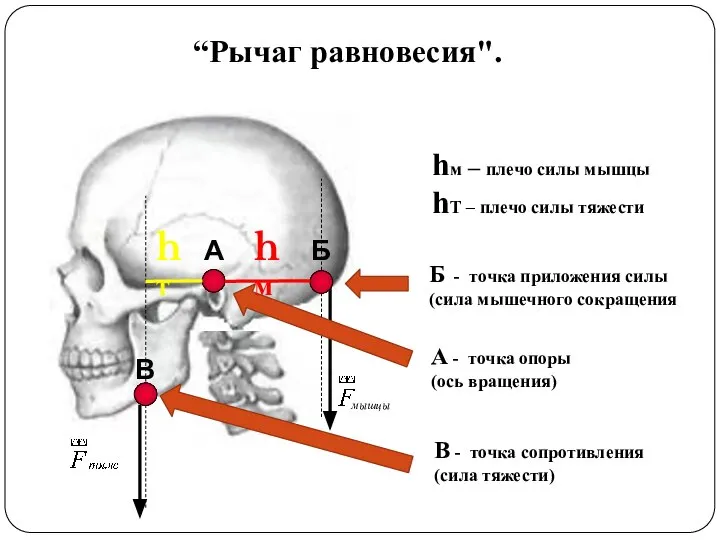
- 52. Рычаг первого рода L1 L2 «Рычаг равновесия»
- 53. А B Б Б - точка приложения силы (сила мышечного сокращения А - точка опоры (ось
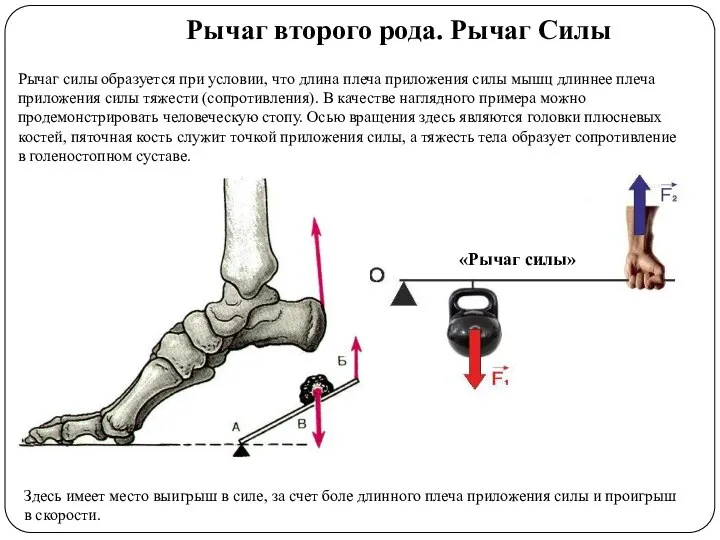
- 54. Рычаг второго рода. Рычаг Силы Рычаг силы образуется при условии, что длина плеча приложения силы мышц
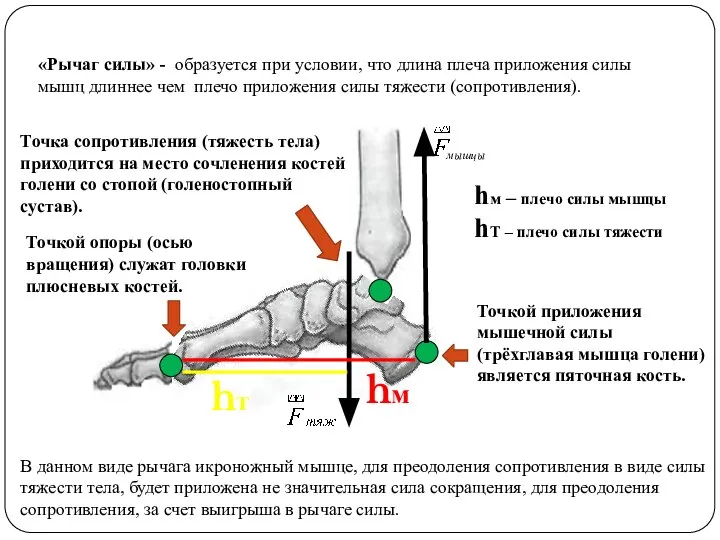
- 55. hт hм hм – плечо силы мышцы hТ – плечо силы тяжести Точкой опоры (осью вращения)
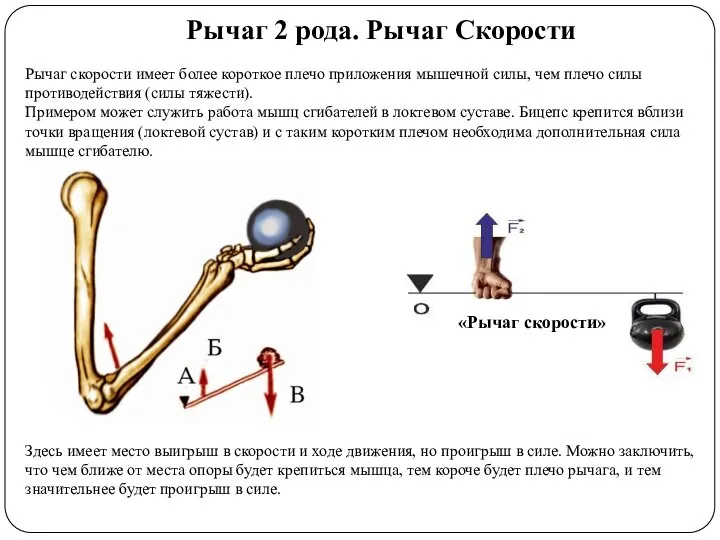
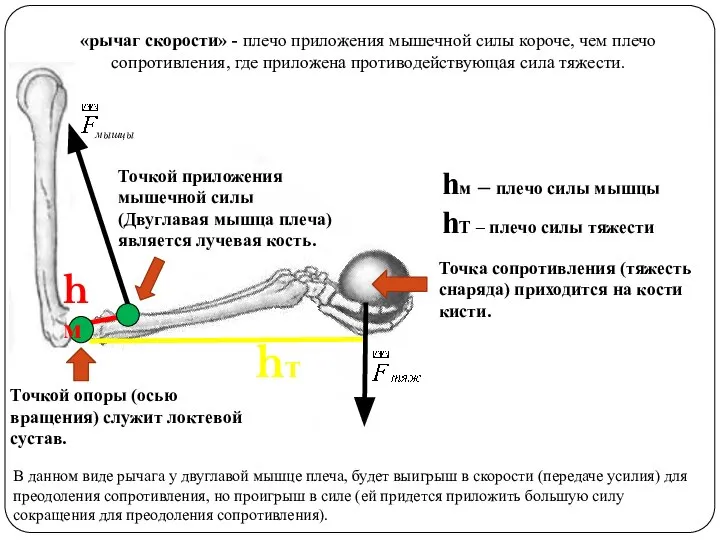
- 56. Рычаг скорости имеет более короткое плечо приложения мышечной силы, чем плечо силы противодействия (силы тяжести). Примером
- 57. мышцы hм hт hм – плечо силы мышцы hТ – плечо силы тяжести «рычаг скорости» -
- 58. Типы тренажеров в зависимости от механизмов Биомеханические особенности: Постоянство нагрузки Биомеханические особенности: Подчиняется правилу рычагов и
- 59. Например: Платформы для жимов ногами будут отличаться нагрузкой, при одинаковой нагруженной массе, из-за количества осей вращения
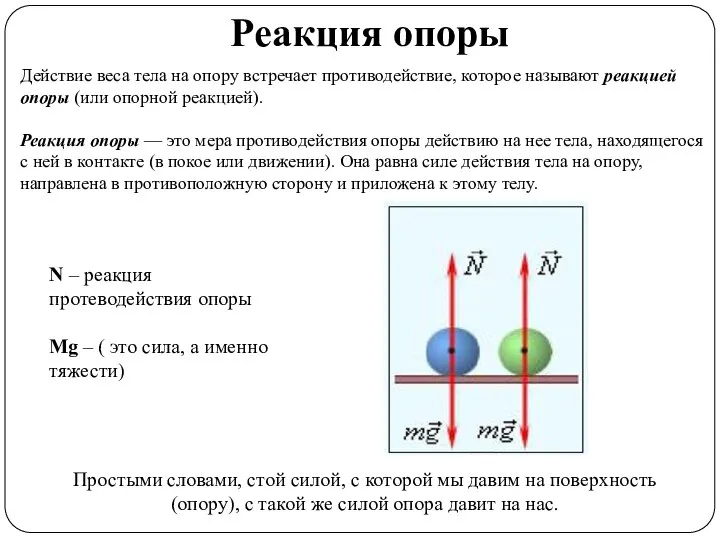
- 60. Действие веса тела на опору встречает противодействие, которое называют реакцией опоры (или опорной реакцией). Реакция опоры
- 61. Момент Силы – это величина вращающегося действия силы (усилие которое вращает предмет). Направление вращения зависит от
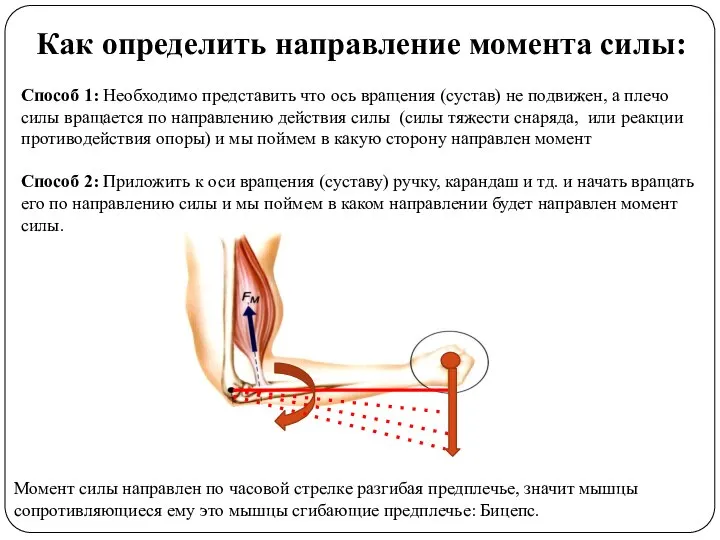
- 62. Как определить направление момента силы: Способ 1: Необходимо представить что ось вращения (сустав) не подвижен, а
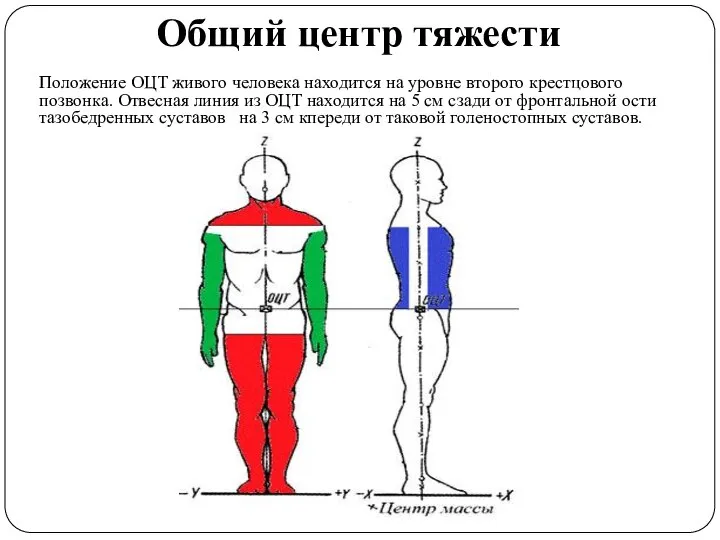
- 63. Положение ОЦТ живого человека находится на уровне второго крестцового позвонка. Отвесная линия из ОЦТ находится на
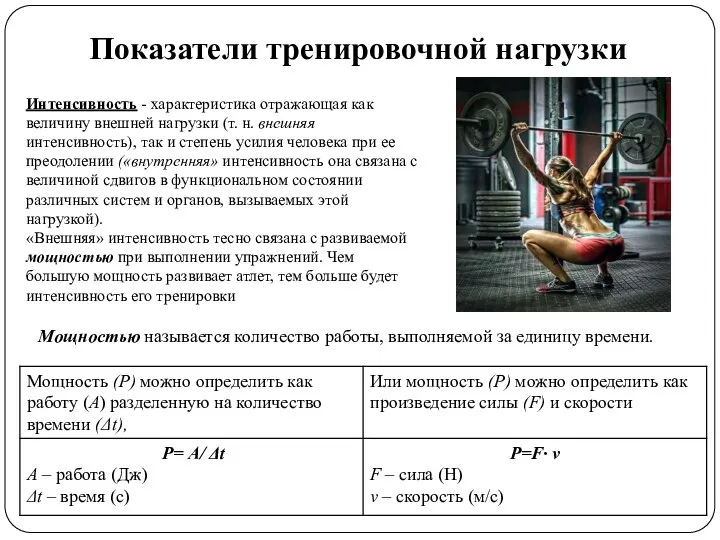
- 64. Интенсивность - характеристика отражающая как величину внешней нагрузки (т. н. внешняя интенсивность), так и степень усилия
- 65. Интенсивность возрастает при: Увеличении веса отягощения. Приближении к состоянию «отказа» в последних повторениях подхода. Сокращении паузы
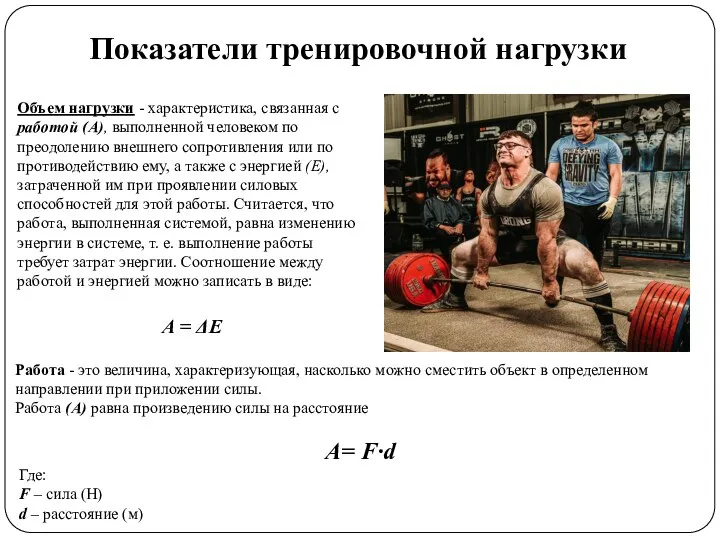
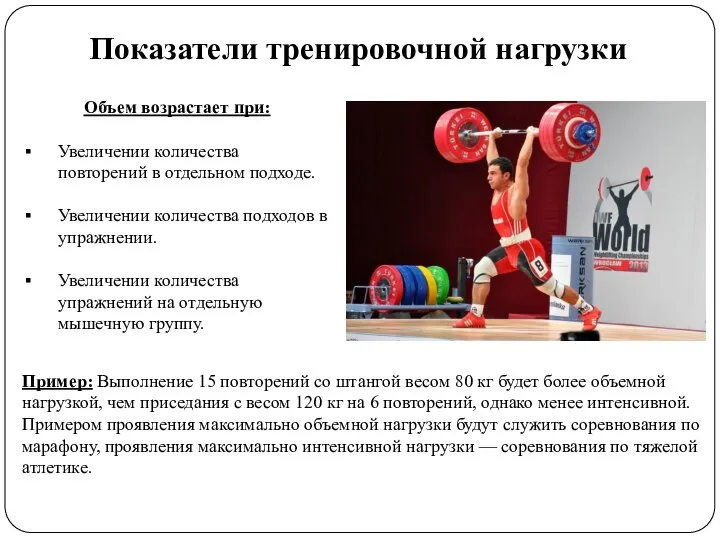
- 66. Объем нагрузки - характеристика, связанная с работой (А), выполненной человеком по преодолению внешнего сопротивления или по
- 67. Объем возрастает при: Увеличении количества повторений в отдельном подходе. Увеличении количества подходов в упражнении. Увеличении количества
- 69. Скачать презентацию
Слайд 3Цели и задачи учебного блока
Цель:
Формирование общих представлений учащихся об Истории развития биомеханики,
Цели и задачи учебного блока
Цель:
Формирование общих представлений учащихся об Истории развития биомеханики,
Слайд 41.История развития Биомеханики
2. Оси и плоскости
3. Биомеханическая модель человека
3.1 Биомеханика ОДА
2. Оси и плоскости
3. Биомеханическая модель человека
3.1 Биомеханика ОДА
Слайд 5Биомеханика – смежная наука, на «стыке» двух наук:
Биологии – науки о жизни
Механики – науки
Биомеханика – смежная наука, на «стыке» двух наук:
Биологии – науки о жизни
Механики – науки
Слайд 6Движения живых существ интересовали человека с давних времен. Многие древнегреческие ученые заложили
Движения живых существ интересовали человека с давних времен. Многие древнегреческие ученые заложили
Слайд 7Леонардо да Винчи (1451 – 1519) – выдающийся итальянский живописец, скульптор, архитектор,
Леонардо да Винчи (1451 – 1519) – выдающийся итальянский живописец, скульптор, архитектор,
Слайд 8В дальнейшем многие ученые такие как Джованни Альфонсо, Борелли Эдуарда, Эдуард и Вильгельм Вебер,
В дальнейшем многие ученые такие как Джованни Альфонсо, Борелли Эдуарда, Эдуард и Вильгельм Вебер,
Слайд 9Оси и плоскости тела человека.
При описании внешних форм тела и нахождения
Оси и плоскости тела человека.
При описании внешних форм тела и нахождения
Слайд 10Для описания пространственного расположения органов или их частей через тело условно проводят
Для описания пространственного расположения органов или их частей через тело условно проводят
Слайд 11Вертикальная ось – образуется при пересечении сагиттальной и фронтальной плоскостей. Направлена вдоль тела
Вертикальная ось – образуется при пересечении сагиттальной и фронтальной плоскостей. Направлена вдоль тела
Слайд 12Фронтальная
ось
Сгибание
Фронтальная ось – образуется при пересечении фронтальной и горизонтальной плоскостей. Ориентирована слева направо
Фронтальная
ось
Сгибание
Фронтальная ось – образуется при пересечении фронтальной и горизонтальной плоскостей. Ориентирована слева направо
Слайд 13Сагиттальная ось – образуется при пересечении сагиттальной и горизонтальной плоскостей. Ориентирована
в переднезаднем
Сагиттальная ось – образуется при пересечении сагиттальной и горизонтальной плоскостей. Ориентирована
в переднезаднем
Слайд 15С точки зрения биомеханики, опорно-двигательный аппарат (ОДА) человека представляет собой управляемую систему
С точки зрения биомеханики, опорно-двигательный аппарат (ОДА) человека представляет собой управляемую систему
Слайд 16Согласно форме и местоположению связанных костных сегментов их соединения рассматривают сточки зрения
Согласно форме и местоположению связанных костных сегментов их соединения рассматривают сточки зрения
Слайд 17Виды нагрузок на ОДА
Виды нагрузок на ОДА

Слайд 18Возраст определяет соотношение органических и минеральных веществ кости и механические свойства кости.
Сопротивление
Возраст определяет соотношение органических и минеральных веществ кости и механические свойства кости.
Сопротивление
Слайд 19Рис. Виды нагрузки: компрессия, растяжение, скручивание (срезывающая нагрузка)
Прочность костей
Прочность суставов, как
Рис. Виды нагрузки: компрессия, растяжение, скручивание (срезывающая нагрузка)
Прочность костей
Прочность суставов, как
Слайд 20Различают эластическую деформацию (обратимую деформацию кости) и пластическую (деформация, которая не исчезает
Различают эластическую деформацию (обратимую деформацию кости) и пластическую (деформация, которая не исчезает
Слайд 21Влияние физической нагрузки на ремоделирование костей
Сторона резорбции кости
Сторона отложения новой кости
Приложение внешней
Влияние физической нагрузки на ремоделирование костей
Сторона резорбции кости
Сторона отложения новой кости
Приложение внешней
Слайд 22Увеличение вертикальной нагрузки на позвоночник приводит к уплощению диска.
При сгибании/разгибании происходит
Увеличение вертикальной нагрузки на позвоночник приводит к уплощению диска.
При сгибании/разгибании происходит
Слайд 23Виды мышечного сокращения
Динамический
(Ауксотонический)
Уступающий
(Эксцентрический)
Изометрический
Преодолевающий
(Концентрический)
Школа эффективного фитнеса и управления “КОРУС”
Изокинетичнский
Виды мышечного сокращения
Динамический
(Ауксотонический)
Уступающий
(Эксцентрический)
Изометрический
Преодолевающий
(Концентрический)
Школа эффективного фитнеса и управления “КОРУС”
Изокинетичнский

Слайд 24Изометрическое сокращение
Пример такой работы — удержание гантели в руке, не меняя ее
Изометрическое сокращение
Пример такой работы — удержание гантели в руке, не меняя ее
Слайд 25Динамическое (Ауксотоническое) сокращение
Динамическое или Ауксотоническое сокращение - при котором длина мышцы изменяется
Динамическое (Ауксотоническое) сокращение
Динамическое или Ауксотоническое сокращение - при котором длина мышцы изменяется

Слайд 26
Динамическое (Ауксотоническое) сокращение
Концентрическое сокращение – такой вид сокращения, при котором напряжение мышцы
Динамическое (Ауксотоническое) сокращение
Концентрическое сокращение – такой вид сокращения, при котором напряжение мышцы
Слайд 27Многочисленными исследованиями доказано, что выполнение физических упражнений в эксцентрическом (уступающем режиме, когда мышца удлиняется)
Многочисленными исследованиями доказано, что выполнение физических упражнений в эксцентрическом (уступающем режиме, когда мышца удлиняется)
Слайд 28Изокинетическое сокращение
Изокинетическое сокращение – это такой вид сокращения мышц, при котором сокращение
Изокинетическое сокращение
Изокинетическое сокращение – это такой вид сокращения мышц, при котором сокращение

Слайд 29СокК
ПоУК
ПаУК
Очень часто для того, чтобы понять механизм работы объекта, его заменяют адекватной
СокК
ПоУК
ПаУК
Очень часто для того, чтобы понять механизм работы объекта, его заменяют адекватной
Слайд 30Механическая модель мышцы
СокК
ПоУК
ПаУК
(СокК) – сократительный компонент мышц. При сокращении мышцы образуются поперечные
Механическая модель мышцы
СокК
ПоУК
ПаУК
(СокК) – сократительный компонент мышц. При сокращении мышцы образуются поперечные
Слайд 31Механическая модель мышцы
СокК
ПоУК
ПаУК
(ПаУК) – параллельно упругий компонент.
Это соединительнотканные образования к которым
Механическая модель мышцы
СокК
ПоУК
ПаУК
(ПаУК) – параллельно упругий компонент.
Это соединительнотканные образования к которым

Слайд 32Механическая модель мышцы
СокК
ПоУК
ПаУК
(ПоУК) - Последовательно упругий компонент. Аналогом данного компонента на модели
Механическая модель мышцы
СокК
ПоУК
ПаУК
(ПоУК) - Последовательно упругий компонент. Аналогом данного компонента на модели
Слайд 33Механические Свойства мышечной ткани
Сократимость
Жесткость
Вязкость
Релаксация
Механические Свойства мышечной ткани
Сократимость
Жесткость
Вязкость
Релаксация

Слайд 34Сократимость – способность мышцы укорачиваться при возбуждении, в результате чего возникает сила тяги.
Сократимость – способность мышцы укорачиваться при возбуждении, в результате чего возникает сила тяги.
Слайд 35Жесткость – это способность противодействовать прикладываемым силам. Коэффициент жесткости определяется как отношение
Жесткость – это способность противодействовать прикладываемым силам. Коэффициент жесткости определяется как отношение
Слайд 36Это связано с тем, что структура мышцы очень сложна. Поэтому для мышцы зависимость
Это связано с тем, что структура мышцы очень сложна. Поэтому для мышцы зависимость
Слайд 37Вязкость – свойство тел оказывать неинерционное сопротивление перемещению одной их части относительно другой
Вязкость – свойство тел оказывать неинерционное сопротивление перемещению одной их части относительно другой
Слайд 38Н
При (растягивании мышцы) зависимость «удлинение – сила» соответствует кривой 1.
При укорочении мышцы
Н
При (растягивании мышцы) зависимость «удлинение – сила» соответствует кривой 1.
При укорочении мышцы
Слайд 39Прочностью материала называют его способность сопротивляться разрушению под действием внешних сил Прочность мышцы оценивается
Прочностью материала называют его способность сопротивляться разрушению под действием внешних сил Прочность мышцы оценивается
Слайд 40Релаксация– свойство мышцы, проявляющееся в постепенном уменьшении силы тяги при постоянной длине
Релаксация– свойство мышцы, проявляющееся в постепенном уменьшении силы тяги при постоянной длине
Слайд 41Биокинематическая пара – это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности
Биокинематическая пара – это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности
Слайд 42Биокинематическая цепь – это последовательное (разветвленное) незамкнутое, либо замкнутое соединение ряда кинематических пар.
Биокинематическая цепь – это последовательное (разветвленное) незамкнутое, либо замкнутое соединение ряда кинематических пар.
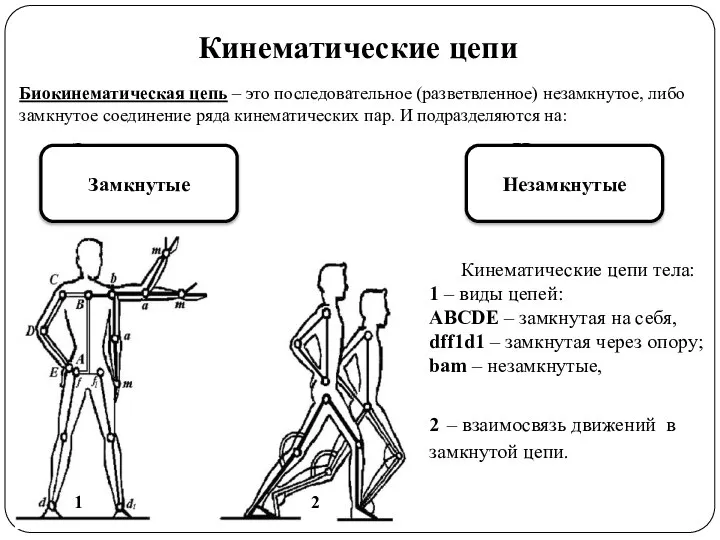
Слайд 43Цепь в которой конечное звено свободно, называют незамкнутой кинематической цепью. Движения в
Цепь в которой конечное звено свободно, называют незамкнутой кинематической цепью. Движения в

Слайд 44Кинематическая пара (Плечо и предплечье) «замыкаются» по средствам штанги со второй кинематической
Кинематическая пара (Плечо и предплечье) «замыкаются» по средствам штанги со второй кинематической
Слайд 451
2
3
Биокинематическое звено – это часть тела расположенная между соседними суставами или между
1
2
3
Биокинематическое звено – это часть тела расположенная между соседними суставами или между
Слайд 46ПРОСТЫЕ
МЕХАНИЗМЫ
Простыми механизмами называют приспособления для преобразования движения и силы
ПРОСТЫЕ
МЕХАНИЗМЫ
Простыми механизмами называют приспособления для преобразования движения и силы
Слайд 47Каждый рычаг имеет следующие элементы:
Точку опоры (0) или ось вращения
Точки приложения
Каждый рычаг имеет следующие элементы:
Точку опоры (0) или ось вращения
Точки приложения
Слайд 48l1
l2
Прямая, проходящая через вектор силы, называется
линией действия силы. На рисунке обозначена
l1
l2
Прямая, проходящая через вектор силы, называется
линией действия силы. На рисунке обозначена
Слайд 4990°
90°
Плечо силы - Кратчайшее расстояние (перпендикуляр) между точкой опоры и прямой, вдоль
90°
90°
Плечо силы - Кратчайшее расстояние (перпендикуляр) между точкой опоры и прямой, вдоль
Слайд 50Техникой упражнения мы можем влиять на нагрузку (в данном случае на «плечо
Техникой упражнения мы можем влиять на нагрузку (в данном случае на «плечо
Слайд 51Виды рычагов
Рычаг первого рода
Точка опоры расположена между двумя точками приложения силы, рычаг
Виды рычагов
Рычаг первого рода
Точка опоры расположена между двумя точками приложения силы, рычаг
Слайд 52
Рычаг первого рода
L1
L2
«Рычаг равновесия»
Рычаг первого рода
L1
L2
«Рычаг равновесия»
Слайд 53А
B
Б
Б - точка приложения силы
(сила мышечного сокращения
А - точка опоры
(ось вращения)
В
А
B
Б
Б - точка приложения силы
(сила мышечного сокращения
А - точка опоры
(ось вращения)
В
Слайд 54Рычаг второго рода. Рычаг Силы
Рычаг силы образуется при условии, что длина плеча приложения
Рычаг второго рода. Рычаг Силы
Рычаг силы образуется при условии, что длина плеча приложения
Слайд 55hт
hм
hм – плечо силы мышцы
hТ – плечо силы тяжести
Точкой опоры (осью
hт
hм
hм – плечо силы мышцы
hТ – плечо силы тяжести
Точкой опоры (осью
Слайд 56Рычаг скорости имеет более короткое плечо приложения мышечной силы, чем плечо силы
Рычаг скорости имеет более короткое плечо приложения мышечной силы, чем плечо силы
Слайд 57мышцы
hм
hт
hм – плечо силы мышцы
hТ – плечо силы тяжести
«рычаг скорости» - плечо
мышцы
hм
hт
hм – плечо силы мышцы
hТ – плечо силы тяжести
«рычаг скорости» - плечо
Слайд 58Типы тренажеров в зависимости от механизмов
Биомеханические особенности:
Постоянство нагрузки
Биомеханические особенности:
Подчиняется правилу рычагов
Типы тренажеров в зависимости от механизмов
Биомеханические особенности:
Постоянство нагрузки
Биомеханические особенности:
Подчиняется правилу рычагов

Слайд 59Например:
Платформы для жимов ногами будут отличаться нагрузкой, при одинаковой нагруженной массе,
Например:
Платформы для жимов ногами будут отличаться нагрузкой, при одинаковой нагруженной массе,

Слайд 60Действие веса тела на опору встречает противодействие, которое называют реакцией опоры (или
Действие веса тела на опору встречает противодействие, которое называют реакцией опоры (или
Слайд 61Момент Силы – это величина вращающегося действия силы (усилие которое вращает предмет).
Момент Силы – это величина вращающегося действия силы (усилие которое вращает предмет).
Слайд 62Как определить направление момента силы:
Способ 1: Необходимо представить что ось вращения (сустав)
Как определить направление момента силы:
Способ 1: Необходимо представить что ось вращения (сустав)
Слайд 63Положение ОЦТ живого человека находится на уровне второго крестцового позвонка. Отвесная линия
Положение ОЦТ живого человека находится на уровне второго крестцового позвонка. Отвесная линия
Слайд 64Интенсивность - характеристика отражающая как величину внешней нагрузки (т. н. внешняя интенсивность),
Интенсивность - характеристика отражающая как величину внешней нагрузки (т. н. внешняя интенсивность),
Слайд 65Интенсивность возрастает при:
Увеличении веса отягощения.
Приближении к состоянию «отказа» в
последних повторениях подхода.
Сокращении
Интенсивность возрастает при:
Увеличении веса отягощения.
Приближении к состоянию «отказа» в
последних повторениях подхода.
Сокращении
Слайд 66Объем нагрузки - характеристика, связанная с работой (А), выполненной человеком по преодолению
Объем нагрузки - характеристика, связанная с работой (А), выполненной человеком по преодолению
Слайд 67Объем возрастает при:
Увеличении количества повторений в отдельном подходе.
Увеличении количества подходов в упражнении.
Увеличении
Увеличении количества повторений в отдельном подходе.
Увеличении количества подходов в упражнении.
Увеличении
 Презентация на тему Основные свойства живых организмов (6 класс)
Презентация на тему Основные свойства живых организмов (6 класс)  Черепные нервы
Черепные нервы Периоды онтогенеза
Периоды онтогенеза Род хариусы
Род хариусы Опыление. 6 класс
Опыление. 6 класс 288955
288955 Николай Иванович Вавилов (1887 – 1943)
Николай Иванович Вавилов (1887 – 1943) Редкие птицы
Редкие птицы Введение в дерматовенерологию структура и функции кожи. Основы патоморфологии кожи
Введение в дерматовенерологию структура и функции кожи. Основы патоморфологии кожи Что происходит с растениями зимой?
Что происходит с растениями зимой? Презентация на тему "Липиды" - презентации по Биологии
Презентация на тему "Липиды" - презентации по Биологии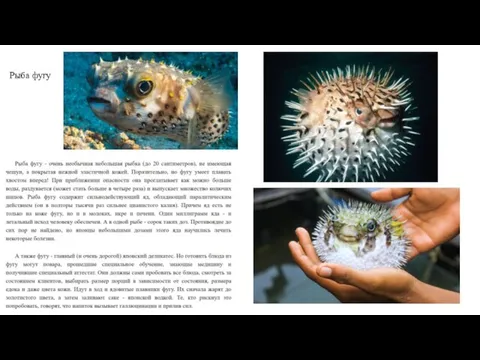 Рыба фугу
Рыба фугу Законы наследования. Тема 17
Законы наследования. Тема 17 Р. Броун, его вклад в развитие физики
Р. Броун, его вклад в развитие физики БЕЛКИ СТРОЕНИЕ ФУНКЦИИ (1)
БЕЛКИ СТРОЕНИЕ ФУНКЦИИ (1) Надкласс Рыбы. Общая характеристика и внешнее строение
Надкласс Рыбы. Общая характеристика и внешнее строение Радужный краб
Радужный краб Возрастные особенности взаимосвязи генетических форм памяти. Пути их развития
Возрастные особенности взаимосвязи генетических форм памяти. Пути их развития Презентация на тему Дыхание и здоровье человека
Презентация на тему Дыхание и здоровье человека  Мечение рыбы
Мечение рыбы 16_ОМ-3.1_ Солнце, растения и мы с вами ОБЖ Правила экологической безопасности
16_ОМ-3.1_ Солнце, растения и мы с вами ОБЖ Правила экологической безопасности Обобщающий урок Строение и многообразие покрытосеменных растений
Обобщающий урок Строение и многообразие покрытосеменных растений Анатомо-физиологические особенности человека в подростковом возрасте
Анатомо-физиологические особенности человека в подростковом возрасте клетка 9 класс
клетка 9 класс Знатоки витаминов. Викторина
Знатоки витаминов. Викторина Внешнее строение моллюсков
Внешнее строение моллюсков Семена и плоды растений
Семена и плоды растений Класс Паукообразные. 7 класс
Класс Паукообразные. 7 класс