- Численные методы и оптимизация межпланетных траекторий

Содержание
- 2. Задачи, поставленные на второй семестр Суть нашего проекта заключается в моделировании и оптимизации траектории полетов космических
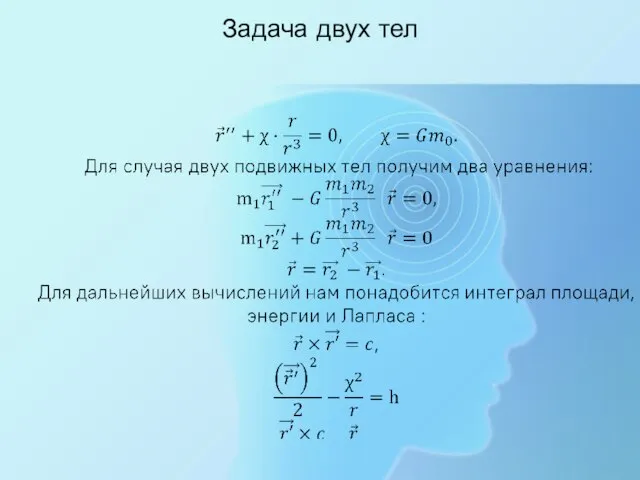
- 3. Задача двух тел
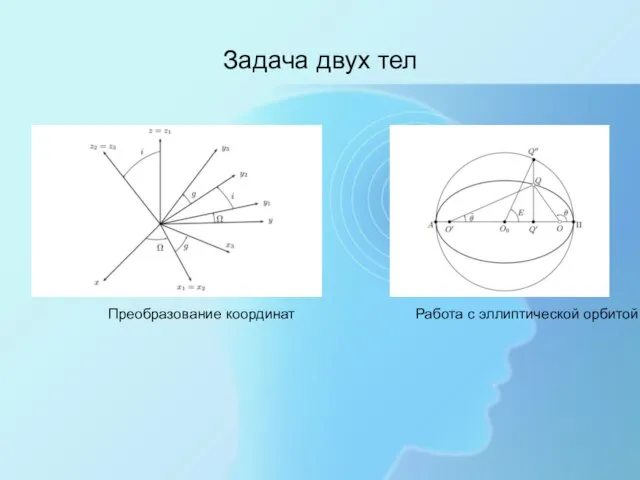
- 4. Задача двух тел Преобразование координат Работа с эллиптической орбитой
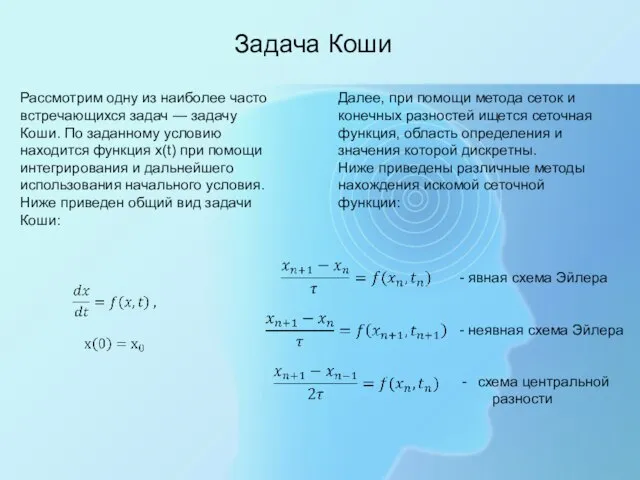
- 5. Задача Коши Рассмотрим одну из наиболее часто встречающихся задач — задачу Коши. По заданному условию находится
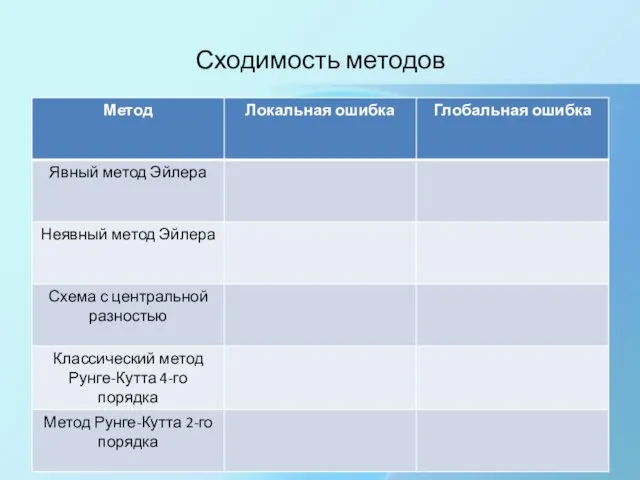
- 6. Сходимость методов
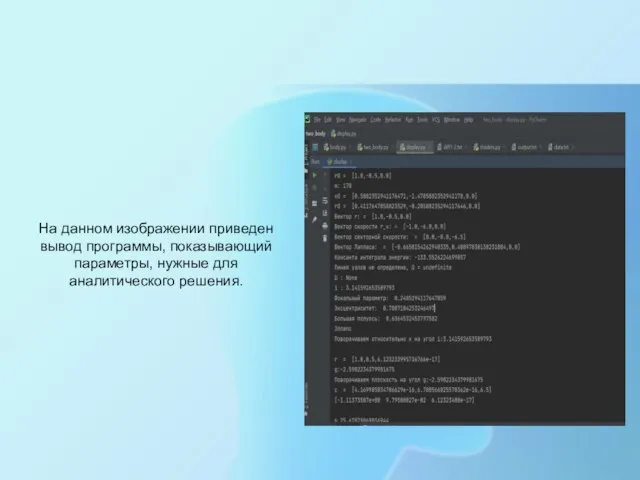
- 7. На данном изображении приведен вывод программы, показывающий параметры, нужные для аналитического решения.
- 8. Пример работы программы
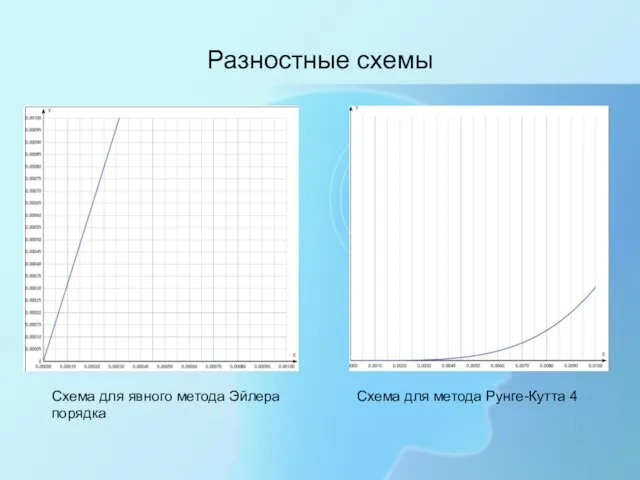
- 10. Разностные схемы Схема для явного метода Эйлера Схема для метода Рунге-Кутта 4 порядка
- 11. Список литературы: [1] Федоренко Р.П., «Введение в вычислительную физику». – 1994 [2] Калиткин Н.Н., «Численные методы».
- 13. Процесс решения задачи Построение математической модели заданного физического процесса Компьютерное моделирование процесса при помощи построенной математической
- 14. Полученные результаты При решении задачи о движении тел, брошенного под углом к горизонту, использовались такие физические
- 15. Полученные результаты Полученная численными методами траектория Зависимость максимального отклонения численного и аналитических решений от величины разбиения
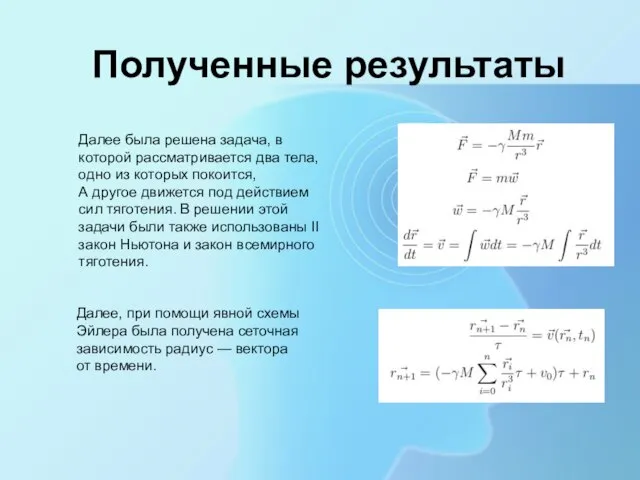
- 16. Полученные результаты Далее была решена задача, в которой рассматривается два тела, одно из которых покоится, А
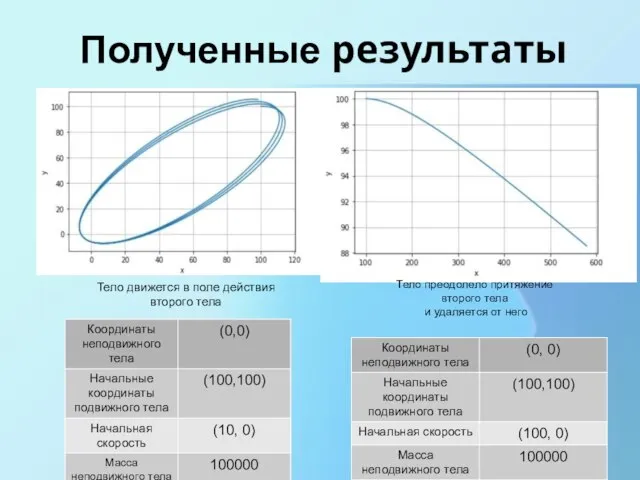
- 17. Полученные результаты Тело движется в поле действия второго тела Тело преодолело притяжение второго тела и удаляется
- 18. В данный момент мы решаем, так называемую, задачу двух тел. Её формулировка следующая: даны два тела,
- 19. Задача двух тел
- 20. Поворот пространства
- 21. Виды траекторий движения Эллиптическая траектория движения тел Гиперболическая траектория движения тел
- 22. Имеем выражение для истинной и эксцентричной аномалии: Дифференцируем его: Переписываем полученное выражение, где n константа для
- 23. По своей сути, задача двух тел – один из случаев задачи Коши, рассмотренной ранее. Метод Рунге-Кутты
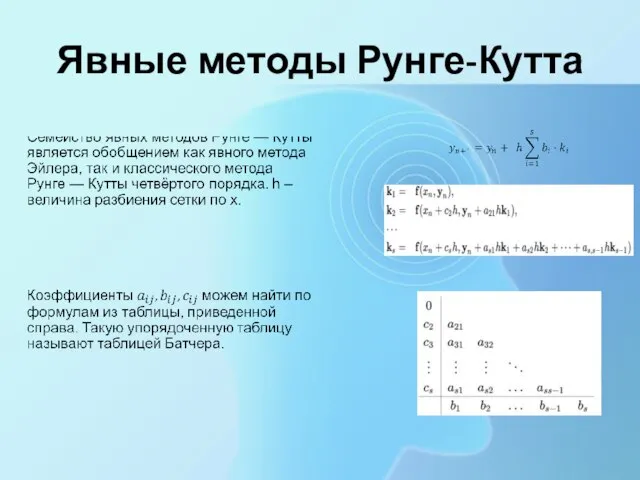
- 24. Явные методы Рунге-Кутта
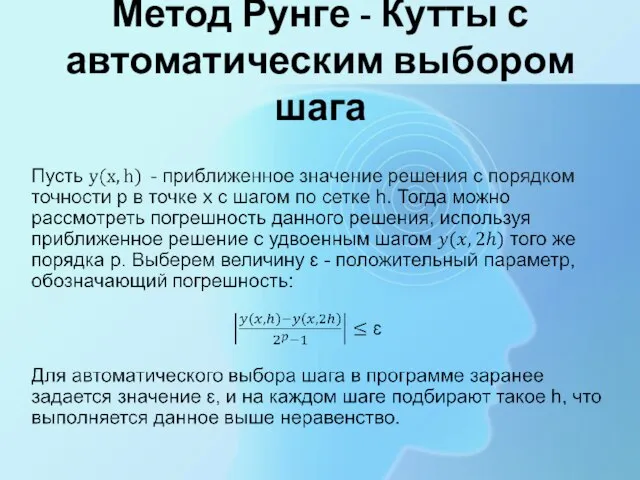
- 25. Метод Рунге - Кутты с автоматическим выбором шага
- 27. Оптимизация траектории - процесс проектирования траектории, который сводит к минимуму (или максимизирует) некоторую меру производительности при
- 28. Прямой метод решения задачи оптимизации траектории состоит из двух этапов: 1) Непосредственно дискретизировать задачу оптимизации траектории,
- 29. Одиночная стрельба – ограничение дефекта на всем сегменте Многократная стрельба – ограничение дефекта на множестве сегментов
- 31. Скачать презентацию
Слайд 2Задачи, поставленные на второй семестр
Суть нашего проекта заключается в моделировании и оптимизации
Задачи, поставленные на второй семестр
Суть нашего проекта заключается в моделировании и оптимизации

Слайд 3
Задача двух тел
Задача двух тел
Слайд 4Задача двух тел
Преобразование координат Работа с эллиптической орбитой
Задача двух тел
Преобразование координат Работа с эллиптической орбитой
Слайд 5Задача Коши
Рассмотрим одну из наиболее часто встречающихся задач — задачу Коши. По
Задача Коши
Рассмотрим одну из наиболее часто встречающихся задач — задачу Коши. По
Слайд 6Сходимость методов
Сходимость методов
Слайд 7На данном изображении приведен вывод программы, показывающий параметры, нужные для аналитического решения.
На данном изображении приведен вывод программы, показывающий параметры, нужные для аналитического решения.
Слайд 8Пример работы программы
Пример работы программы
Слайд 10Разностные схемы
Схема для явного метода Эйлера Схема для метода Рунге-Кутта 4 порядка
Разностные схемы
Схема для явного метода Эйлера Схема для метода Рунге-Кутта 4 порядка
Слайд 11
Список литературы:
[1] Федоренко Р.П., «Введение в вычислительную физику». – 1994
[2] Калиткин
Список литературы:
[1] Федоренко Р.П., «Введение в вычислительную физику». – 1994
[2] Калиткин
![Список литературы: [1] Федоренко Р.П., «Введение в вычислительную физику». – 1994 [2]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/858640/slide-10.jpg)
Слайд 13 Процесс решения задачи
Построение математической модели заданного физического процесса
Компьютерное моделирование процесса при
Процесс решения задачи
Построение математической модели заданного физического процесса
Компьютерное моделирование процесса при
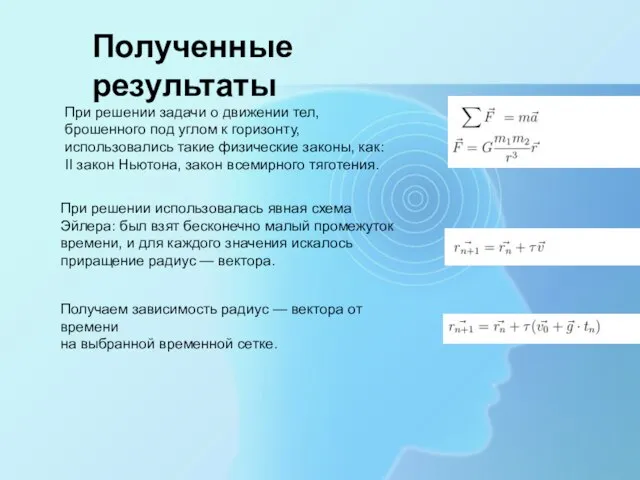
Слайд 14Полученные результаты
При решении задачи о движении тел, брошенного под углом к горизонту,
Полученные результаты
При решении задачи о движении тел, брошенного под углом к горизонту,
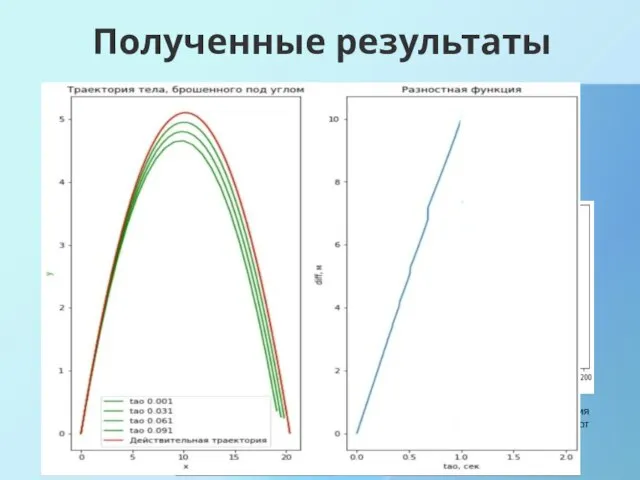
Слайд 15 Полученные результаты
Полученная численными методами траектория
Зависимость максимального отклонения
численного и аналитических решений от
Полученные результаты
Полученная численными методами траектория
Зависимость максимального отклонения
численного и аналитических решений от
Слайд 16Полученные результаты
Далее была решена задача, в которой рассматривается два тела, одно из
Полученные результаты
Далее была решена задача, в которой рассматривается два тела, одно из
Слайд 17Полученные результаты
Тело движется в поле действия
второго тела
Тело преодолело притяжение
второго тела
и
Полученные результаты
Тело движется в поле действия
второго тела
Тело преодолело притяжение
второго тела
и
Слайд 18В данный момент мы решаем, так называемую, задачу двух тел. Её формулировка
В данный момент мы решаем, так называемую, задачу двух тел. Её формулировка
Слайд 19
Задача двух тел
Задача двух тел
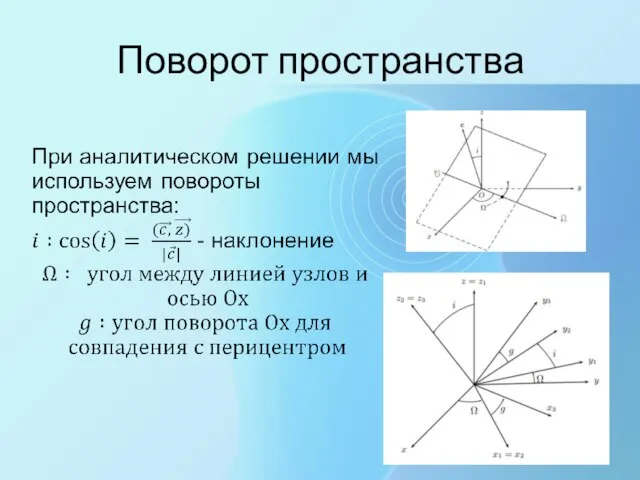
Слайд 20Поворот пространства
Поворот пространства
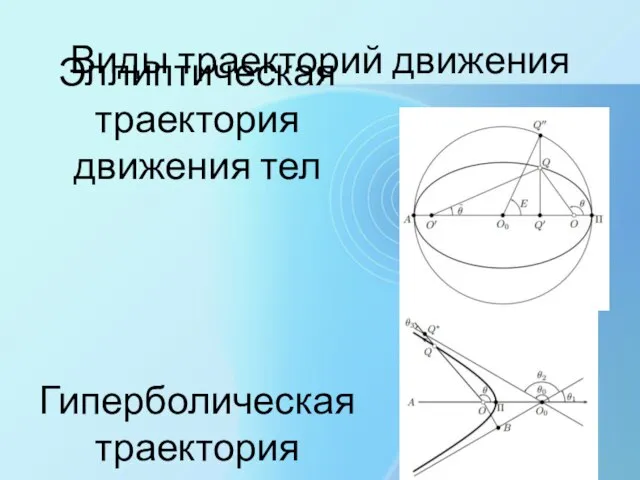
Слайд 21Виды траекторий движения
Эллиптическая траектория движения тел
Гиперболическая траектория движения тел
Виды траекторий движения
Эллиптическая траектория движения тел
Гиперболическая траектория движения тел
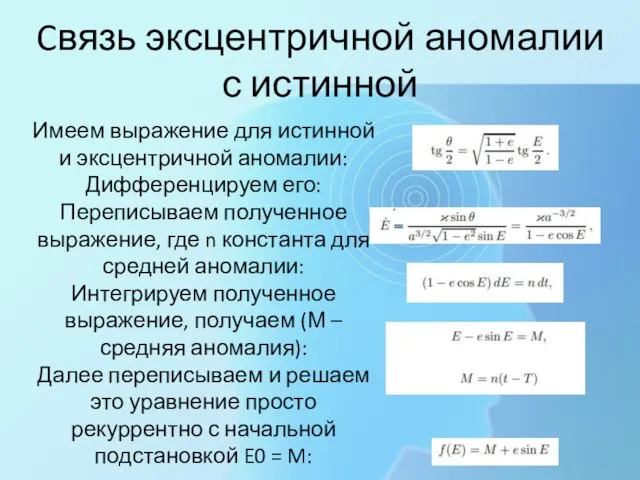
Слайд 22Имеем выражение для истинной и эксцентричной аномалии:
Дифференцируем его:
Переписываем полученное выражение, где n
Имеем выражение для истинной и эксцентричной аномалии:
Дифференцируем его:
Переписываем полученное выражение, где n
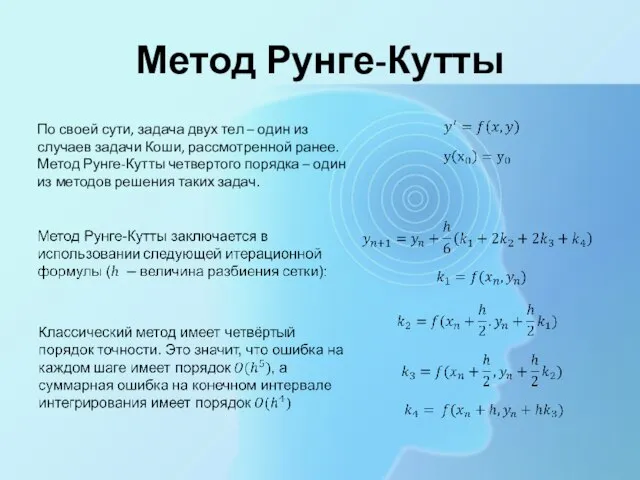
Слайд 23По своей сути, задача двух тел – один из случаев задачи Коши,
По своей сути, задача двух тел – один из случаев задачи Коши,
Слайд 24
Явные методы Рунге-Кутта
Явные методы Рунге-Кутта
Слайд 25
Метод Рунге - Кутты с автоматическим выбором шага
Метод Рунге - Кутты с автоматическим выбором шага
Слайд 27Оптимизация траектории - процесс проектирования траектории, который сводит к минимуму (или максимизирует) некоторую меру производительности при соблюдении
Оптимизация траектории - процесс проектирования траектории, который сводит к минимуму (или максимизирует) некоторую меру производительности при соблюдении
Слайд 28Прямой метод решения задачи оптимизации траектории состоит из двух этапов:
1) Непосредственно
Прямой метод решения задачи оптимизации траектории состоит из двух этапов:
1) Непосредственно
Слайд 29Одиночная стрельба – ограничение дефекта на всем сегменте
Многократная стрельба – ограничение дефекта
Одиночная стрельба – ограничение дефекта на всем сегменте
Многократная стрельба – ограничение дефекта
 Движение жидкостей и газов. Закон Бернулли
Движение жидкостей и газов. Закон Бернулли Электрический ток. Электрическая цепь. Источники тока
Электрический ток. Электрическая цепь. Источники тока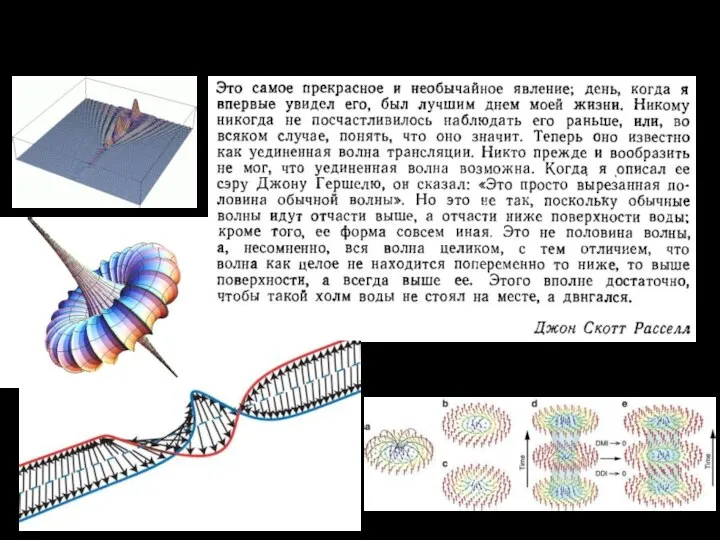 Новая жизнь полной интегрируемости 2
Новая жизнь полной интегрируемости 2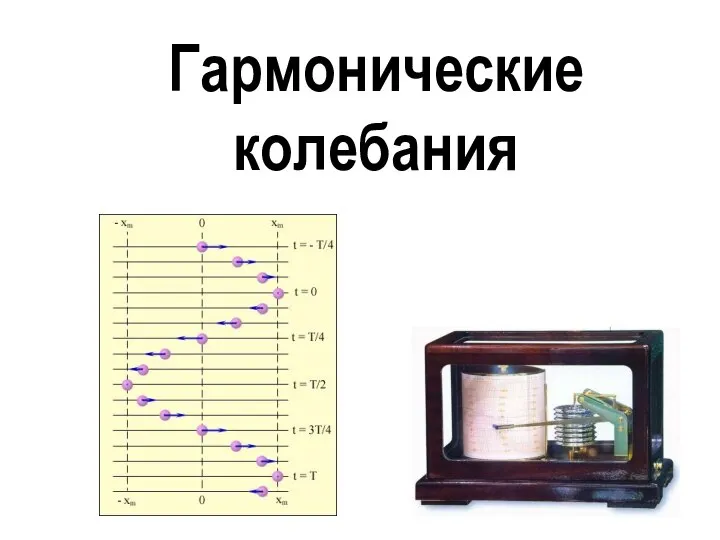 Lektsia_8_Kolebania_ZS
Lektsia_8_Kolebania_ZS Законы Ньютона
Законы Ньютона Сила
Сила Проводники и диэлектрики в электрическом поле
Проводники и диэлектрики в электрическом поле Оптика и квантовая физика. Лекция 12
Оптика и квантовая физика. Лекция 12 Презентация на тему Теория фотоэффекта
Презентация на тему Теория фотоэффекта  Действие магнитного поля на проводник с током и движущийся заряд
Действие магнитного поля на проводник с током и движущийся заряд Презентация на тему Световые кванты
Презентация на тему Световые кванты  Электрический ток. Лекция 24(6)
Электрический ток. Лекция 24(6) Строение атома. Опыт Резерфорда
Строение атома. Опыт Резерфорда Техника Победы. Автомобиль ЗИС - 5 (трёхтонка, Захар, Захар Иванович)
Техника Победы. Автомобиль ЗИС - 5 (трёхтонка, Захар, Захар Иванович) Валы и оси редуктора
Валы и оси редуктора Взаимодействие нейтронов с веществом. Лекция № 06
Взаимодействие нейтронов с веществом. Лекция № 06 Презентация на тему Измерение атмосферного давления опыт Торричелли
Презентация на тему Измерение атмосферного давления опыт Торричелли  Тепловая машина с поршнем
Тепловая машина с поршнем Звездный час. Мероприятие по физике
Звездный час. Мероприятие по физике Кинематические характеристики механического движения
Кинематические характеристики механического движения 1426584
1426584 Относительность движения
Относительность движения Плавное включение ламп накаливания
Плавное включение ламп накаливания Размерность
Размерность Тепловые двигатели
Тепловые двигатели Молекулярная физика. Основные положения МКТ
Молекулярная физика. Основные положения МКТ Строительный экскаватор. Гидравлический цилиндр
Строительный экскаватор. Гидравлический цилиндр Измерение мощности в трехфазной цепи
Измерение мощности в трехфазной цепи