- Динамика и устойчивость сооружений

Содержание
- 2. Основные предпосылки и гипотезы Рассматриваются линейно деформируемые системы. 2. Исходное состояние – равновесие при статических (квазистатических)
- 3. Плоский динамический изгиб прямолинейного стержня с распределённой массой Рабочие гипотезы Динамический изгиб стержня считается независимым от
- 4. Свободное изгибное движение прямолинейного стержня с распределённой массой x A (x), I (x) x y 0
- 5. x x y 0 ПСР v (x,t) qf (x,t) Сопротивление вязкой среды qin (x,t) – интенсивность
- 6. Уравнения состояния элемента dx 1. Уравнения равновесия (статика) Q (x,t) M (x,t) qf (x,t) qin (x,t)
- 7. Уравнения состояния элемента dx 1. Уравнения равновесия (статика) Q (x,t) M (x,t) qf (x,t) qin (x,t)
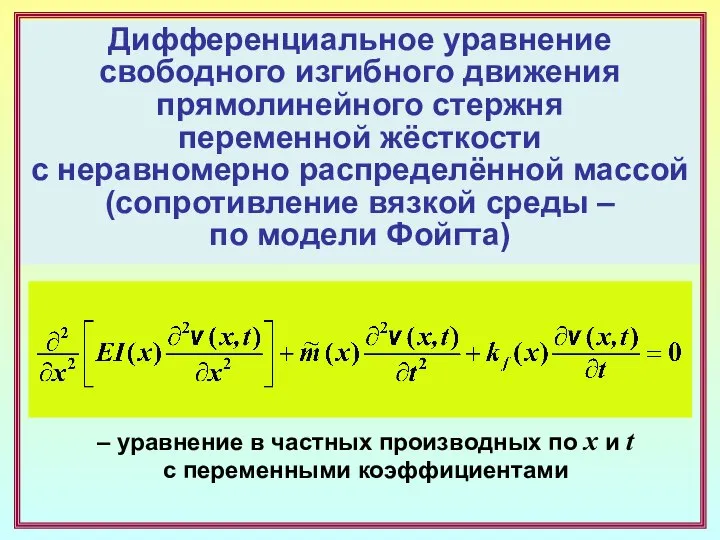
- 8. Дифференциальное уравнение свободного изгибного движения прямолинейного стержня переменной жёсткости с неравномерно распределённой массой (сопротивление вязкой среды
- 9. Частные случаи дифференциального уравнения свободного изгибного движения прямолинейного стержня 2. Стержень постоянной жёсткости EI с равномерно
- 10. Общее решение уравнения (А) по методу Фурье: Частный случай – собственные изгибные колебания: Дифференциальное уравнение амплитуд
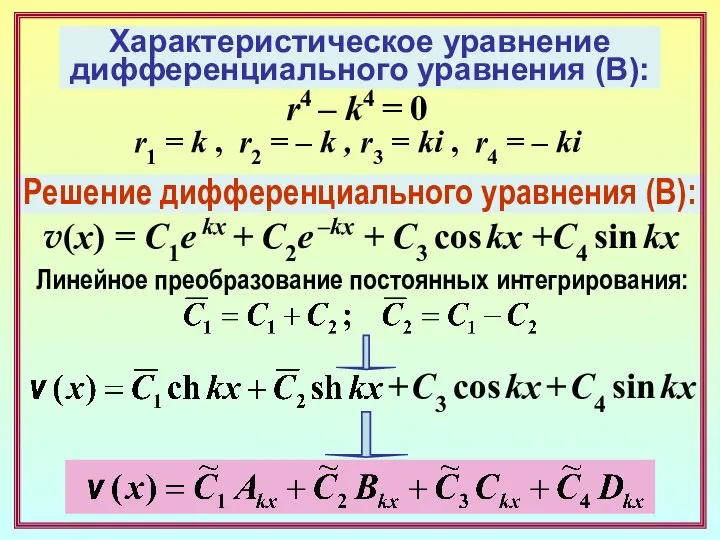
- 11. Характеристическое уравнение дифференциального уравнения (В): r4 – k4 = 0 r1 = k , r2 =
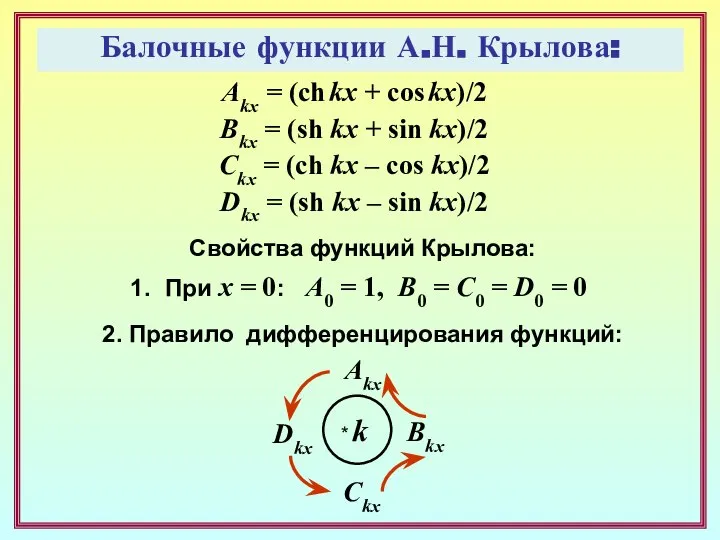
- 12. Балочные функции А.Н. Крылова: Akx = (ch kx + cos kx)/2 Bkx = (sh kx +
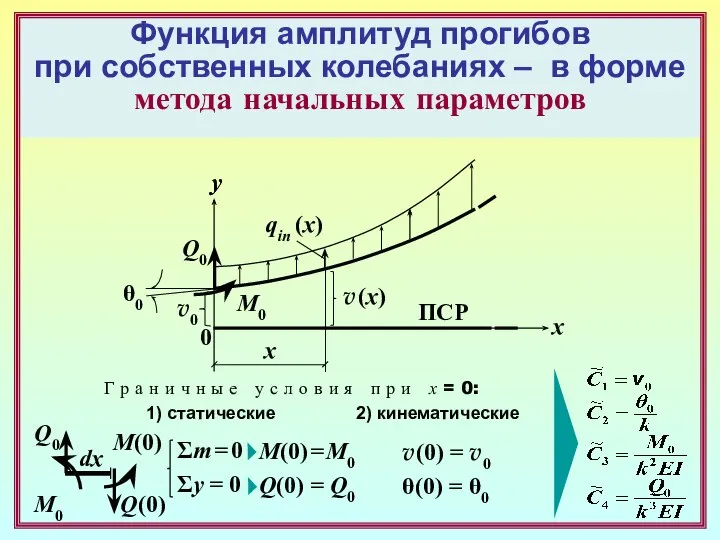
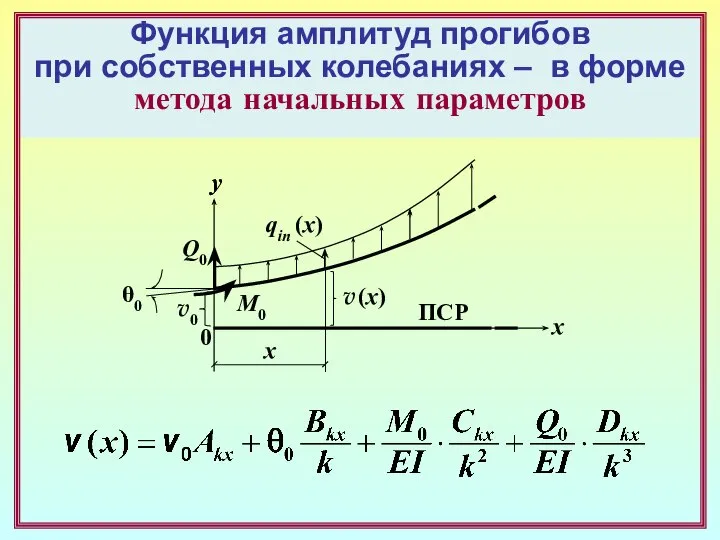
- 13. Функция амплитуд прогибов при собственных колебаниях – в форме метода начальных параметров x x y 0
- 14. Функция амплитуд прогибов при собственных колебаниях – в форме метода начальных параметров x x y 0
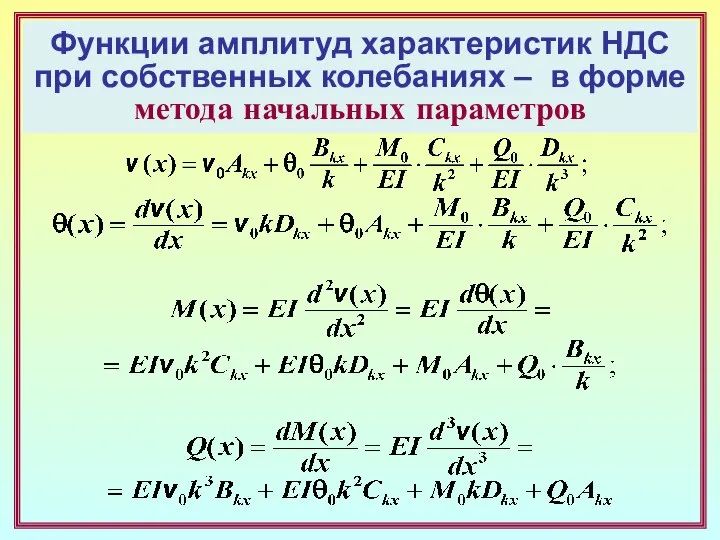
- 15. Функции амплитуд характеристик НДС при собственных колебаниях – в форме метода начальных параметров
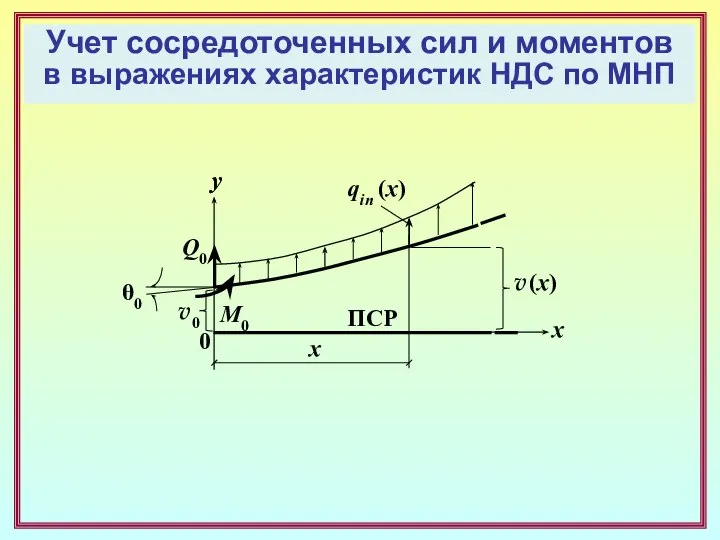
- 16. Учет сосредоточенных сил и моментов в выражениях характеристик НДС по МНП x y 0 ПСР v
- 17. x F y 0 ПСР v (x) y qin (x) v0 θ0 Q0 M0 aF ,
- 18. x F y 0 ПСР v (x) y qin (x) v0 θ0 Q0 M0 aF ,
- 19. Учет сосредоточенных сил и моментов в выражениях характеристик НДС по МНП
- 20. Основные уравнения и уравнение частот собственных колебаний по МНП Г р а н и ч н
- 21. Основные уравнения и уравнение частот собственных колебаний по МНП f * W = 0 v0 θ0
- 22. Спектр частот собственных колебаний и главные формы колебаний Det ( f ) k 0 k1 k2
- 23. Вынужденное изгибное движение прямолинейного стержня с распределённой массой x x y 0 ПСР v (x,t) q
- 24. x x y 0 ПСР v (x,t) q (x,t) F (t) aM aq aF Решение кинетостатическим
- 25. Решение кинетостатическим методом M (x,t) Уравнения равновесия (статика) q (x,t) qin (x,t) qf (x,t) dx Q
- 26. Дифференциальное уравнение вынужденного изгибного движения прямолинейного стержня переменной жёсткости с неравномерно распределённой массой (сопротивление вязкой среды
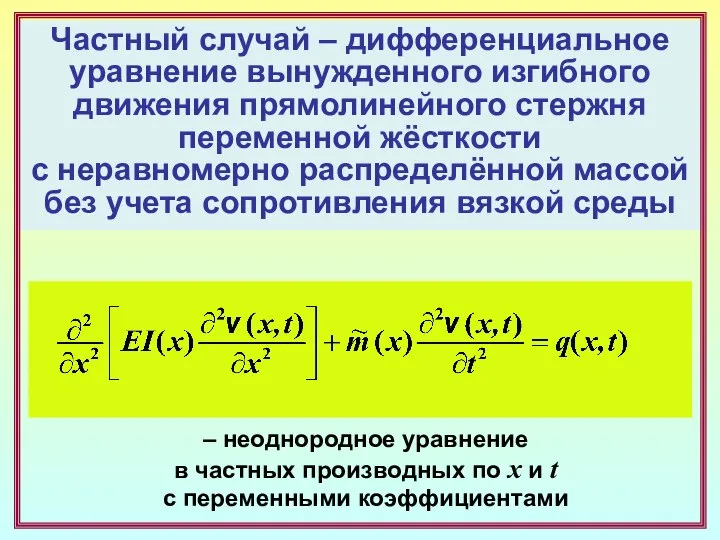
- 27. Частный случай – дифференциальное уравнение вынужденного изгибного движения прямолинейного стержня переменной жёсткости с неравномерно распределённой массой
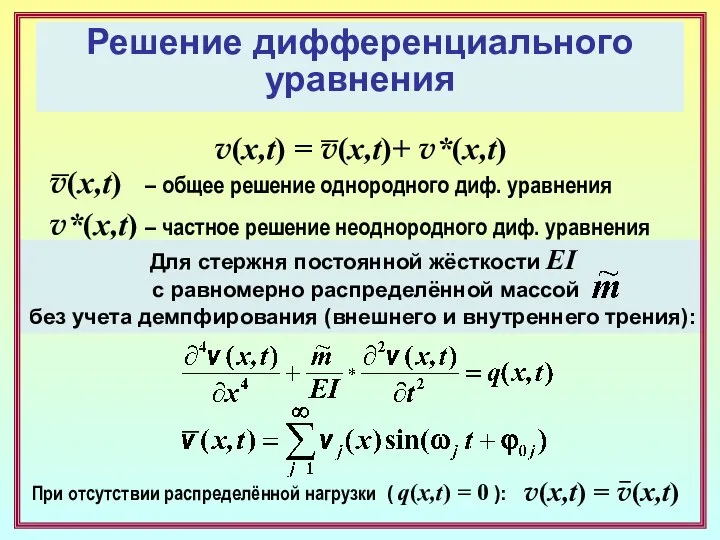
- 28. Решение дифференциального уравнения v(x,t) = v(x,t)+ v*(x,t) v(x,t) – общее решение однородного диф. уравнения v*(x,t) –
- 29. Учёт сосредоточенных нагрузок Статические условия на границе участков в точке приложения F(t) , M(t) F (t)
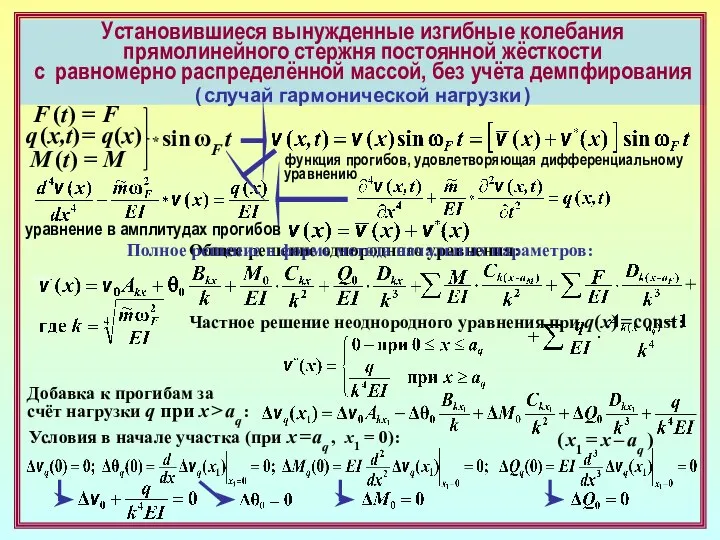
- 30. Установившиеся вынужденные изгибные колебания прямолинейного стержня постоянной жёсткости с равномерно распределённой массой, без учёта демпфирования (
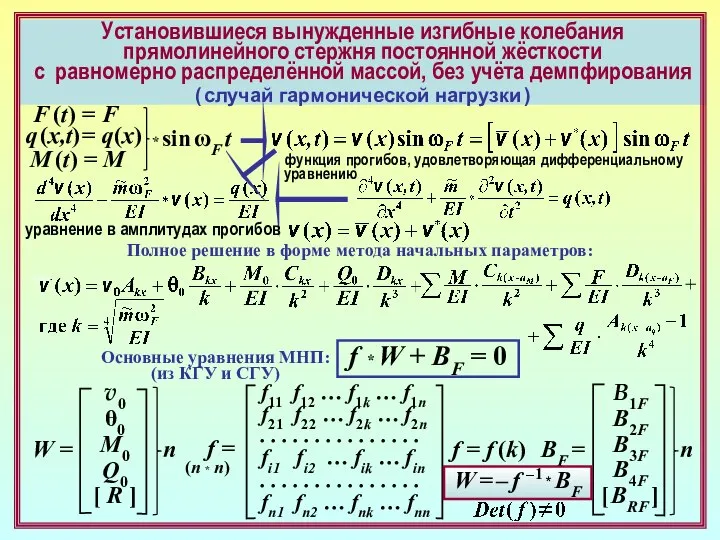
- 31. Установившиеся вынужденные изгибные колебания прямолинейного стержня постоянной жёсткости с равномерно распределённой массой, без учёта демпфирования (
- 32. К о н т р о л ь н ы е в о п р о
- 34. Скачать презентацию
Слайд 2Основные предпосылки
и гипотезы
Рассматриваются линейно
деформируемые системы.
2. Исходное состояние – равновесие
Основные предпосылки
и гипотезы
Рассматриваются линейно
деформируемые системы.
2. Исходное состояние – равновесие
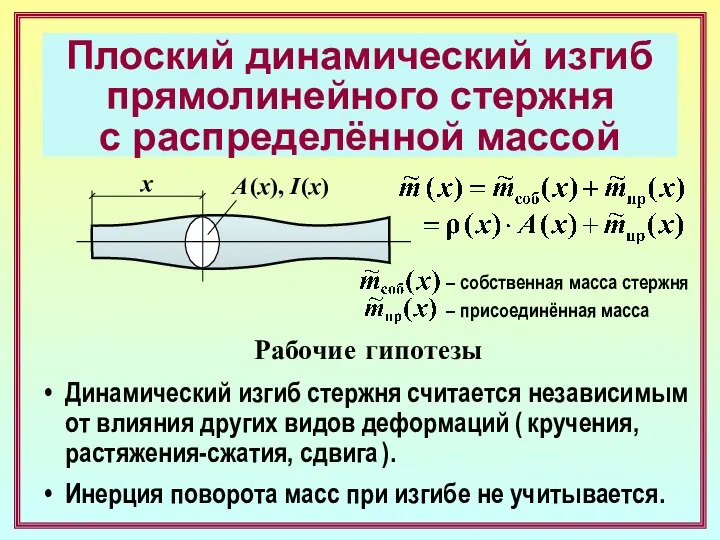
Слайд 3Плоский динамический изгиб прямолинейного стержня
с распределённой массой
Рабочие гипотезы
Динамический изгиб стержня считается независимым
Плоский динамический изгиб прямолинейного стержня
с распределённой массой
Рабочие гипотезы
Динамический изгиб стержня считается независимым
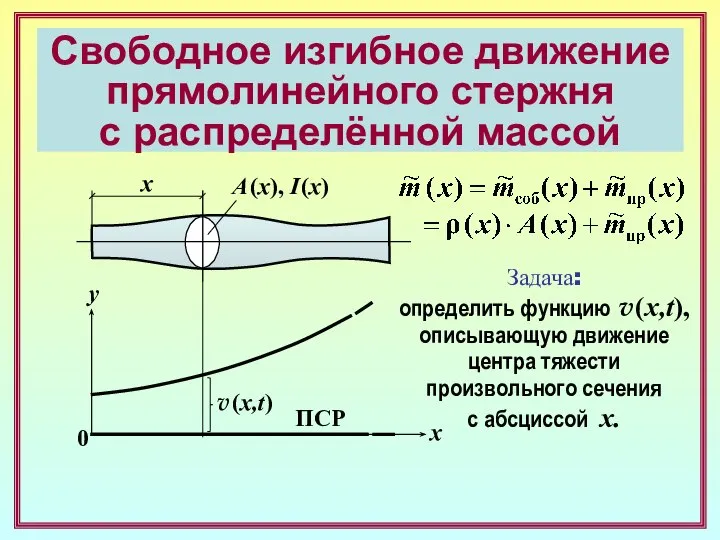
Слайд 4Свободное изгибное движение прямолинейного стержня
с распределённой массой
x
A (x), I (x)
x
y
0
ПСР
v (x,t)
Задача:
определить функцию
Свободное изгибное движение прямолинейного стержня
с распределённой массой
x
A (x), I (x)
x
y
0
ПСР
v (x,t)
Задача:
определить функцию
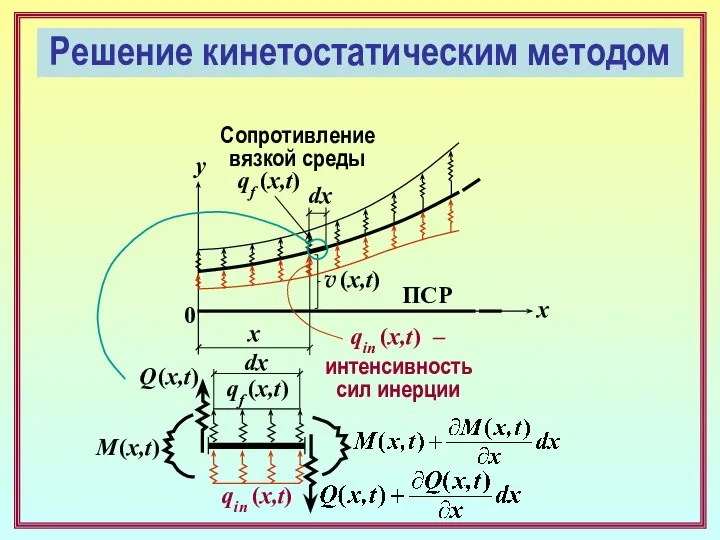
Слайд 5x
x
y
0
ПСР
v (x,t)
qf (x,t)
Сопротивление
вязкой среды
qin (x,t) –
интенсивность
сил инерции
dx
Q (x,t)
M (x,t)
dx
qf (x,t)
qin
x
x
y
0
ПСР
v (x,t)
qf (x,t)
Сопротивление
вязкой среды
qin (x,t) –
интенсивность
сил инерции
dx
Q (x,t)
M (x,t)
dx
qf (x,t)
qin
Слайд 6Уравнения состояния элемента dx
1. Уравнения равновесия (статика)
Q (x,t)
M (x,t)
qf (x,t)
qin (x,t)
dx
Σ m
Уравнения состояния элемента dx
1. Уравнения равновесия (статика)
Q (x,t)
M (x,t)
qf (x,t)
qin (x,t)
dx
Σ m

Слайд 7Уравнения состояния элемента dx
1. Уравнения равновесия (статика)
Q (x,t)
M (x,t)
qf (x,t)
qin (x,t)
dx
Разрешающее
уравнение равновесия:
2.
Уравнения состояния элемента dx
1. Уравнения равновесия (статика)
Q (x,t)
M (x,t)
qf (x,t)
qin (x,t)
dx
Разрешающее
уравнение равновесия:
2.

Слайд 8Дифференциальное уравнение свободного изгибного движения прямолинейного стержня
переменной жёсткости
с неравномерно распределённой
Дифференциальное уравнение свободного изгибного движения прямолинейного стержня переменной жёсткости с неравномерно распределённой
Слайд 9Частные случаи
дифференциального уравнения свободного изгибного движения прямолинейного стержня
2. Стержень постоянной жёсткости EI
Частные случаи
дифференциального уравнения свободного изгибного движения прямолинейного стержня
2. Стержень постоянной жёсткости EI

Слайд 10Общее решение уравнения (А)
по методу Фурье:
Частный случай –
собственные изгибные колебания:
Дифференциальное уравнение амплитуд
Общее решение уравнения (А)
по методу Фурье:
Частный случай –
собственные изгибные колебания:
Дифференциальное уравнение амплитуд

Слайд 11Характеристическое уравнение дифференциального уравнения (В):
r4 – k4 = 0
r1 = k
Характеристическое уравнение дифференциального уравнения (В):
r4 – k4 = 0
r1 = k
Слайд 12Балочные функции А.Н. Крылова:
Akx = (ch kx + cos kx)/2
Bkx =
Балочные функции А.Н. Крылова:
Akx = (ch kx + cos kx)/2
Bkx =
Слайд 13Функция амплитуд прогибов
при собственных колебаниях – в форме метода начальных параметров
x
x
y
0
ПСР
v (x)
y
qin
Функция амплитуд прогибов
при собственных колебаниях – в форме метода начальных параметров
x
x
y
0
ПСР
v (x)
y
qin
Слайд 14Функция амплитуд прогибов
при собственных колебаниях – в форме метода начальных параметров
x
x
y
0
ПСР
v (x)
y
qin
Функция амплитуд прогибов
при собственных колебаниях – в форме метода начальных параметров
x
x
y
0
ПСР
v (x)
y
qin
Слайд 15Функции амплитуд характеристик НДС
при собственных колебаниях – в форме метода начальных параметров
Функции амплитуд характеристик НДС
при собственных колебаниях – в форме метода начальных параметров
Слайд 16Учет сосредоточенных сил и моментов
в выражениях характеристик НДС по МНП
x
y
0
ПСР
v (x)
y
qin
Учет сосредоточенных сил и моментов
в выражениях характеристик НДС по МНП
x
y
0
ПСР
v (x)
y
qin
Слайд 17x
F
y
0
ПСР
v (x)
y
qin (x)
v0
θ0
Q0
M0
aF , aM
M
F
R
J
Реакция внешней линейной связи
Сила инерции точечной массы
M
J
Реакция внешней
x
F
y
0
ПСР
v (x)
y
qin (x)
v0
θ0
Q0
M0
aF , aM
M
F
R
J
Реакция внешней линейной связи
Сила инерции точечной массы
M
J
Реакция внешней

Слайд 18x
F
y
0
ПСР
v (x)
y
qin (x)
v0
θ0
Q0
M0
aF , aM
I
II
M
Продолжение vI(x)
vI(x)
vII(x)
Δv (x)
x
Δv (x) = vII(x) – vI(x)
x
F
y
0
ПСР
v (x)
y
qin (x)
v0
θ0
Q0
M0
aF , aM
I
II
M
Продолжение vI(x)
vI(x)
vII(x)
Δv (x)
x
Δv (x) = vII(x) – vI(x)

Слайд 19Учет сосредоточенных сил и моментов
в выражениях характеристик НДС по МНП
Учет сосредоточенных сил и моментов
в выражениях характеристик НДС по МНП

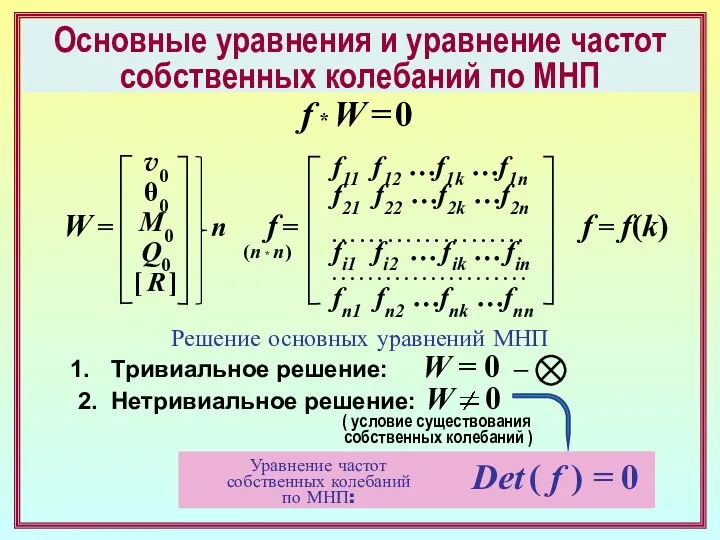
Слайд 20Основные уравнения и уравнение частот собственных колебаний по МНП
Г р а
Основные уравнения и уравнение частот собственных колебаний по МНП
Г р а
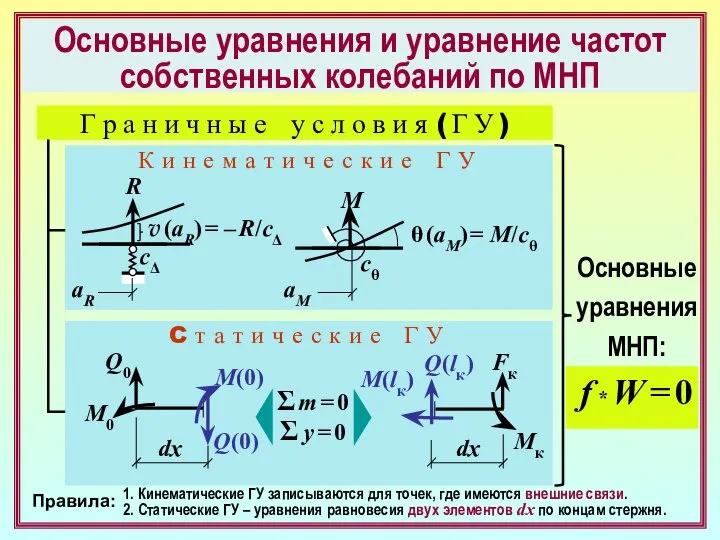
Слайд 21Основные уравнения и уравнение частот собственных колебаний по МНП
f * W
Основные уравнения и уравнение частот собственных колебаний по МНП
f * W
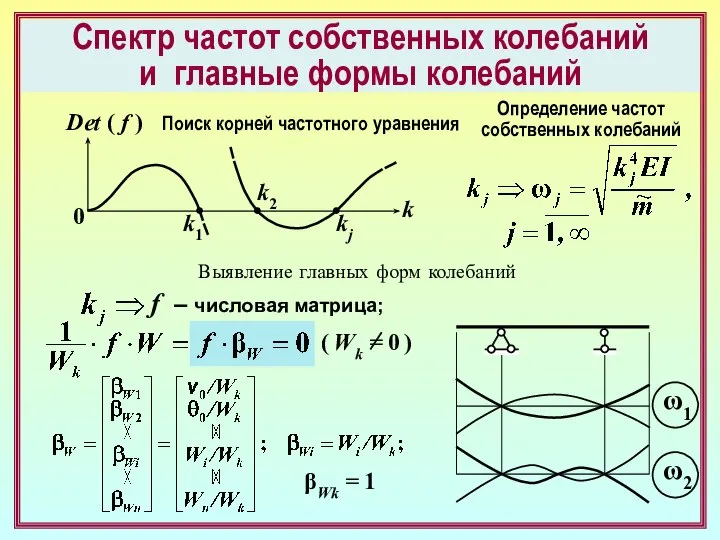
Слайд 22Спектр частот собственных колебаний
и главные формы колебаний
Det ( f )
k
0
k1
k2
kj
Поиск
Спектр частот собственных колебаний
и главные формы колебаний
Det ( f )
k
0
k1
k2
kj
Поиск
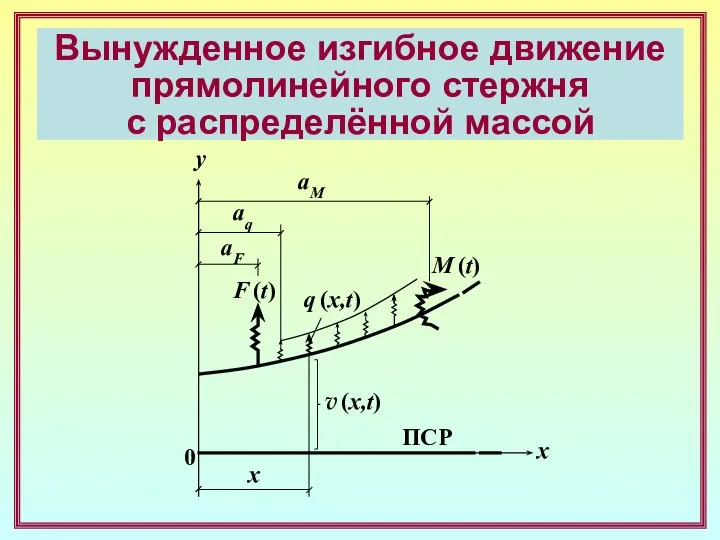
Слайд 23Вынужденное изгибное движение прямолинейного стержня
с распределённой массой
x
x
y
0
ПСР
v (x,t)
q (x,t)
F (t)
aM
aq
aF
M (t)
Вынужденное изгибное движение прямолинейного стержня
с распределённой массой
x
x
y
0
ПСР
v (x,t)
q (x,t)
F (t)
aM
aq
aF
M (t)
Слайд 24x
x
y
0
ПСР
v (x,t)
q (x,t)
F (t)
aM
aq
aF
Решение кинетостатическим методом
qin (x,t)
qf (x,t)
q (x,t)
qin (x,t)
qf (x,t)
dx
M (t)
x
x
y
0
ПСР
v (x,t)
q (x,t)
F (t)
aM
aq
aF
Решение кинетостатическим методом
qin (x,t)
qf (x,t)
q (x,t)
qin (x,t)
qf (x,t)
dx
M (t)

Слайд 25Решение кинетостатическим методом
M (x,t)
Уравнения
равновесия
(статика)
q (x,t)
qin (x,t)
qf (x,t)
dx
Q (x,t)
Σ m =
Решение кинетостатическим методом
M (x,t)
Уравнения
равновесия
(статика)
q (x,t)
qin (x,t)
qf (x,t)
dx
Q (x,t)
Σ m =

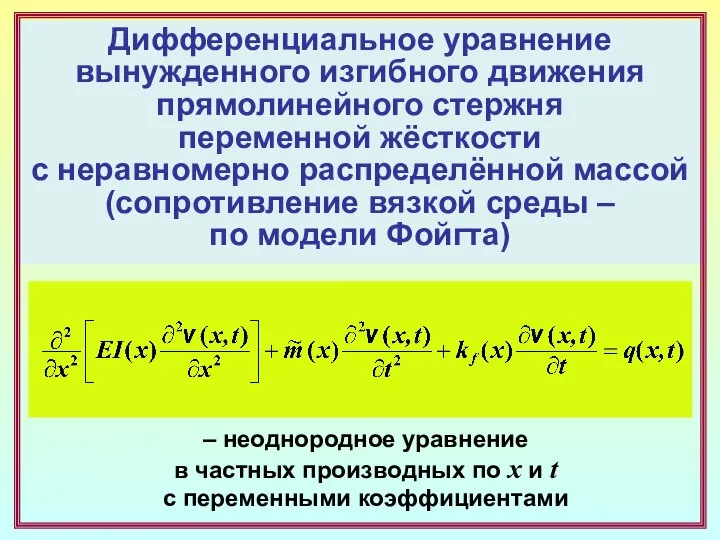
Слайд 26Дифференциальное уравнение вынужденного изгибного движения прямолинейного стержня
переменной жёсткости
с неравномерно распределённой
Дифференциальное уравнение вынужденного изгибного движения прямолинейного стержня переменной жёсткости с неравномерно распределённой
Слайд 27Частный случай – дифференциальное уравнение вынужденного изгибного движения прямолинейного стержня
переменной жёсткости
Частный случай – дифференциальное уравнение вынужденного изгибного движения прямолинейного стержня переменной жёсткости
Слайд 28Решение дифференциального уравнения
v(x,t) = v(x,t)+ v*(x,t)
v(x,t) – общее решение однородного диф. уравнения
Решение дифференциального уравнения
v(x,t) = v(x,t)+ v*(x,t)
v(x,t) – общее решение однородного диф. уравнения
Слайд 29Учёт сосредоточенных нагрузок
Статические условия на границе участков
в точке приложения F(t) , M(t)
F
Учёт сосредоточенных нагрузок
Статические условия на границе участков
в точке приложения F(t) , M(t)
F

Слайд 30Установившиеся вынужденные изгибные колебания прямолинейного стержня постоянной жёсткости
с равномерно распределённой массой, без
Установившиеся вынужденные изгибные колебания прямолинейного стержня постоянной жёсткости с равномерно распределённой массой, без
Слайд 31Установившиеся вынужденные изгибные колебания прямолинейного стержня постоянной жёсткости
с равномерно распределённой массой, без
Установившиеся вынужденные изгибные колебания прямолинейного стержня постоянной жёсткости с равномерно распределённой массой, без
Слайд 32К о н т р о л ь н ы е в
К о н т р о л ь н ы е в
 Лабораторная работа 2. Исследование статических и динамических характеристик источников тока в аналоговых ИС
Лабораторная работа 2. Исследование статических и динамических характеристик источников тока в аналоговых ИС Инжекторная система впрыска топлива
Инжекторная система впрыска топлива Контакты, контактные материалы, припои и флюсы
Контакты, контактные материалы, припои и флюсы Презентация на тему Новые преобразования для теории относительности
Презентация на тему Новые преобразования для теории относительности  Обобщающий урок по механике (10 класс)
Обобщающий урок по механике (10 класс) Презентация на тему Изобретение радио А.С. Поповым
Презентация на тему Изобретение радио А.С. Поповым  Плоскопараллельное движение твердой среды
Плоскопараллельное движение твердой среды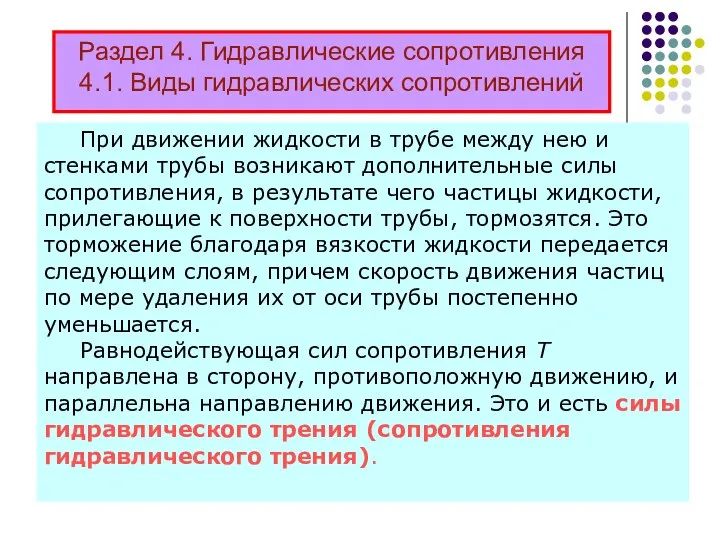 Гидравлические сопротивления. 4.1. Виды гидравлических сопротивлений
Гидравлические сопротивления. 4.1. Виды гидравлических сопротивлений Бури. Скорость бури
Бури. Скорость бури Силы в природе
Силы в природе Принципиальные электро-схема (6 класс)
Принципиальные электро-схема (6 класс) Открытый урок по физике. Основной закон электростатики - закон Кулона
Открытый урок по физике. Основной закон электростатики - закон Кулона Сила Лоренца
Сила Лоренца Алгоритмы распознавания КА на изображениях, получаемых с оптических телескопов
Алгоритмы распознавания КА на изображениях, получаемых с оптических телескопов Вариант расчета ФР. Закон смещения Вина
Вариант расчета ФР. Закон смещения Вина Швейная машина. История создания швейной машины
Швейная машина. История создания швейной машины Закон Ома для участка цепи. Расчет сопротивления проводника
Закон Ома для участка цепи. Расчет сопротивления проводника Клёпка, пайка, притирка и доводка
Клёпка, пайка, притирка и доводка 9 класс
9 класс Строение атома
Строение атома Technical Service Bulletin. Модель Mighty. Замена клапана ЕГР
Technical Service Bulletin. Модель Mighty. Замена клапана ЕГР Таблица Основы МКТ. Газовые законы
Таблица Основы МКТ. Газовые законы Метрология. Погрешности измерений
Метрология. Погрешности измерений Испарение и конденсант
Испарение и конденсант Всемирное тяготение
Всемирное тяготение Фізика. Запитання для оцінювання
Фізика. Запитання для оцінювання Кинематика точки
Кинематика точки Основы термодинамики
Основы термодинамики