- Электрическая винто-моторная установка для БПЛА С

Содержание
- 2. Цель проекта: Разработка электрической винто-моторной уста-новки, применяемой в конструкции беспилотных летательных аппаратов (БПЛА) с вертикальным взлетом.
- 3. Сфера применения БПЛА в настоящее время постоянно расширяется, открывая новые возмож-ности для деятельности человека. В то
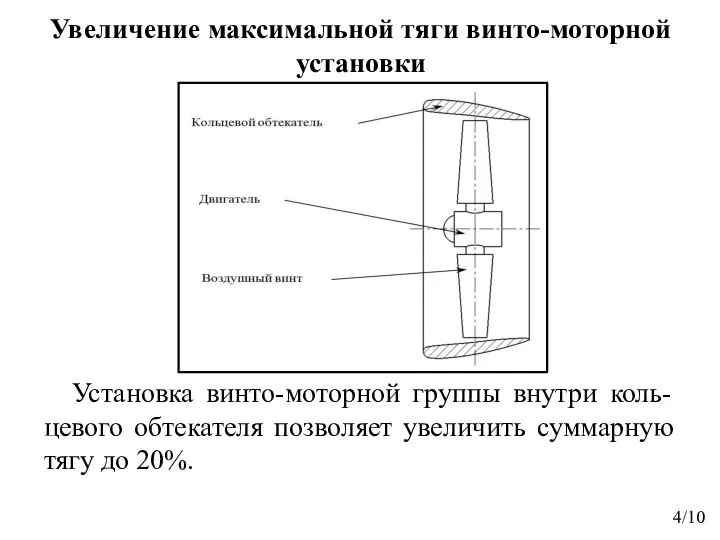
- 4. Увеличение максимальной тяги винто-моторной установки Установка винто-моторной группы внутри коль-цевого обтекателя позволяет увеличить суммарную тягу до
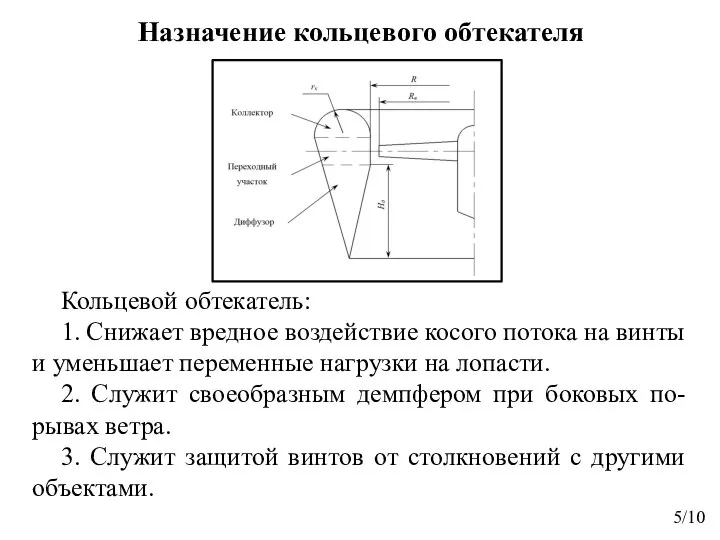
- 5. Кольцевой обтекатель: 1. Снижает вредное воздействие косого потока на винты и уменьшает переменные нагрузки на лопасти.
- 6. Компенсация гироскопического момента Использование двух электродвигателей располо-женных соосно друг другу позволяет компен-сировать гироскопические моменты, создаваемые при
- 7. Электрическая винто-моторная установка 7/10 3Д-модель электрической винто-моторной установ-ки, выполненная в CAD-системе SolidWorks. Изготовленный действую-щий макет электрической
- 8. Характеристики электрической винто-моторной установки Мощность электродвигателей: 2,7 кВт. Напряжение питания: 36 В. Максимальная взлетная масса: 9,6
- 9. Перспективы развития проекта 1. Создание цифрового двойника БПЛА с верти-кальным взлетом. 2. Создание различных вариантов многомоторных
- 11. Скачать презентацию
Слайд 2Цель проекта:
Разработка электрической винто-моторной уста-новки, применяемой в конструкции беспилотных летательных аппаратов (БПЛА)
Цель проекта:
Разработка электрической винто-моторной уста-новки, применяемой в конструкции беспилотных летательных аппаратов (БПЛА)
Слайд 3Сфера применения БПЛА в настоящее время постоянно расширяется, открывая новые возмож-ности для
Слайд 4Увеличение максимальной тяги винто-моторной установки
Установка винто-моторной группы внутри коль-цевого обтекателя позволяет увеличить
Увеличение максимальной тяги винто-моторной установки
Установка винто-моторной группы внутри коль-цевого обтекателя позволяет увеличить
Слайд 5Кольцевой обтекатель:
1. Снижает вредное воздействие косого потока на винты и уменьшает переменные
Кольцевой обтекатель:
1. Снижает вредное воздействие косого потока на винты и уменьшает переменные
Слайд 6Компенсация гироскопического момента
Использование двух электродвигателей располо-женных соосно друг другу позволяет компен-сировать гироскопические
Компенсация гироскопического момента
Использование двух электродвигателей располо-женных соосно друг другу позволяет компен-сировать гироскопические
Слайд 7Электрическая винто-моторная установка
7/10
3Д-модель электрической винто-моторной установ-ки, выполненная в CAD-системе SolidWorks.
Изготовленный действую-щий макет
Электрическая винто-моторная установка
7/10
3Д-модель электрической винто-моторной установ-ки, выполненная в CAD-системе SolidWorks.
Изготовленный действую-щий макет

Слайд 8Характеристики электрической винто-моторной установки
Мощность электродвигателей: 2,7 кВт.
Напряжение питания: 36 В.
Максимальная взлетная масса:
Характеристики электрической винто-моторной установки
Мощность электродвигателей: 2,7 кВт.
Напряжение питания: 36 В.
Максимальная взлетная масса:
Слайд 9Перспективы развития проекта
1. Создание цифрового двойника БПЛА с верти-кальным взлетом.
2. Создание различных
Перспективы развития проекта
1. Создание цифрового двойника БПЛА с верти-кальным взлетом.
2. Создание различных
 Метод рефрактометрии и ИК-спектроскопии
Метод рефрактометрии и ИК-спектроскопии Потери и коэффициент полезного действия
Потери и коэффициент полезного действия Проверочные работы по физике для 7 – 8 класса
Проверочные работы по физике для 7 – 8 класса Презентация на тему Закон Ома
Презентация на тему Закон Ома  Гук Роберт (1635 - 1703). Закон Гука
Гук Роберт (1635 - 1703). Закон Гука Работа газа и пара при расширении. Двигатель внутреннего сгорания
Работа газа и пара при расширении. Двигатель внутреннего сгорания Игра-соревнование Орешек знаний тверд
Игра-соревнование Орешек знаний тверд Подготовка к к/р по термодинамике
Подготовка к к/р по термодинамике Насос сетевой СЭ1250-140-11 с торцовыми уплотнениями
Насос сетевой СЭ1250-140-11 с торцовыми уплотнениями Механик тирбәнеш, дулкыннар. Тавыш
Механик тирбәнеш, дулкыннар. Тавыш Изменения геофизических характеристик прискважинной зоны
Изменения геофизических характеристик прискважинной зоны Производство,передача и использование электрической энергии
Производство,передача и использование электрической энергии Равномерное прямолинейное движение
Равномерное прямолинейное движение Электрический ток
Электрический ток Мини ядерный реактор
Мини ядерный реактор Диэлектрики в энергетическом поле
Диэлектрики в энергетическом поле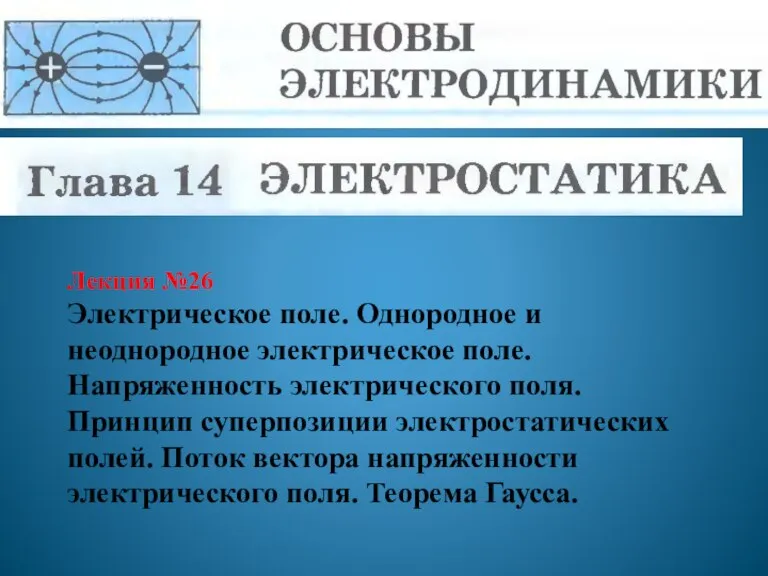 Электрическое поле. Однородное и неоднородное электрическое поле. Напряженность электрического поля
Электрическое поле. Однородное и неоднородное электрическое поле. Напряженность электрического поля Механическая работа и мощность
Механическая работа и мощность Презентация на тему Принципы телевидения
Презентация на тему Принципы телевидения 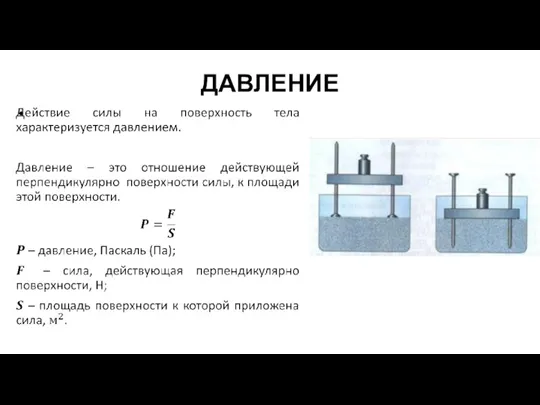 Давление, работа, энергия, мощность
Давление, работа, энергия, мощность Посадки. Основы построения и расчет предельных отклонений
Посадки. Основы построения и расчет предельных отклонений Электрическое поле
Электрическое поле Оптоволоконные лазеры
Оптоволоконные лазеры Моніторинг електромагнітного фонового поля промислової частоти території одного із районів м.Харкова
Моніторинг електромагнітного фонового поля промислової частоти території одного із районів м.Харкова Метод наложения для расчета электрических цепей
Метод наложения для расчета электрических цепей Ионизирующие и неионизирующие излучения, их применение в лучевой диагностике и лучевой терапии
Ионизирующие и неионизирующие излучения, их применение в лучевой диагностике и лучевой терапии Термодинамика и энергия горения
Термодинамика и энергия горения Ферромагнитные динамические амортизаторы
Ферромагнитные динамические амортизаторы