- Элементы аналитической механики

Содержание
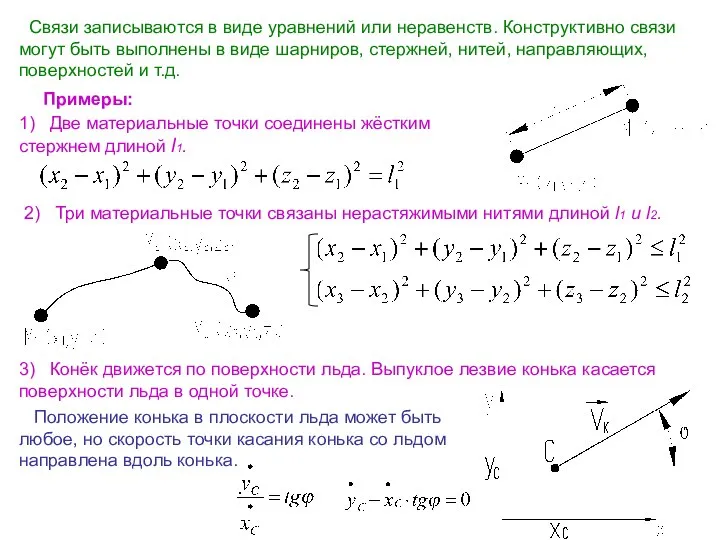
- 2. Связи записываются в виде уравнений или неравенств. Конструктивно связи могут быть выполнены в виде шарниров, стержней,
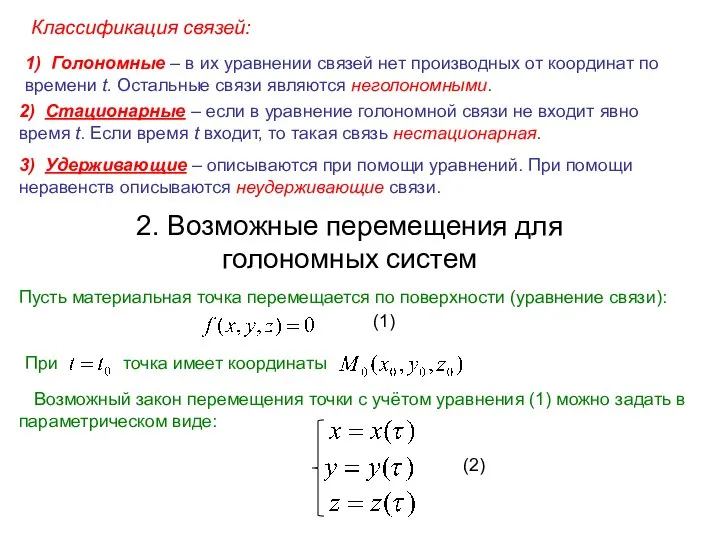
- 3. Классификация связей: 1) Голономные – в их уравнении связей нет производных от координат по времени t.
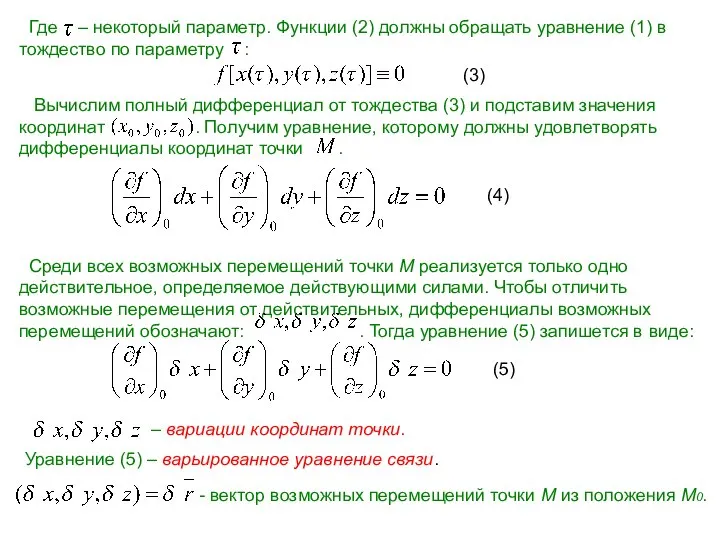
- 4. Где – некоторый параметр. Функции (2) должны обращать уравнение (1) в тождество по параметру : (3)
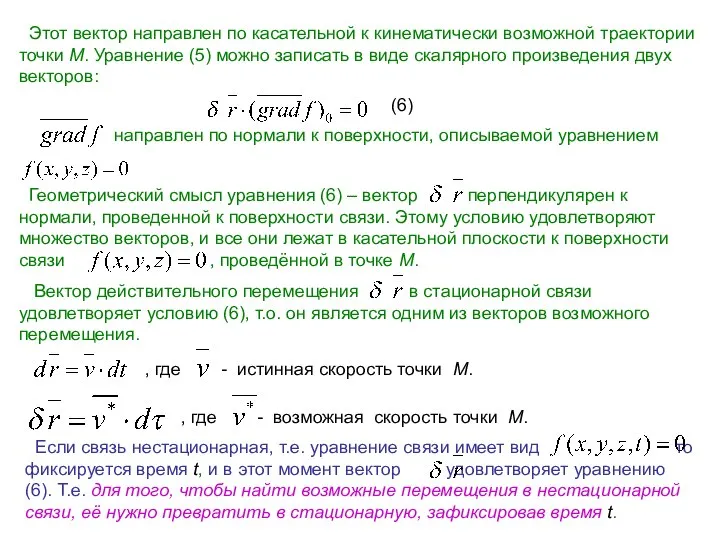
- 5. Этот вектор направлен по касательной к кинематически возможной траектории точки М. Уравнение (5) можно записать в
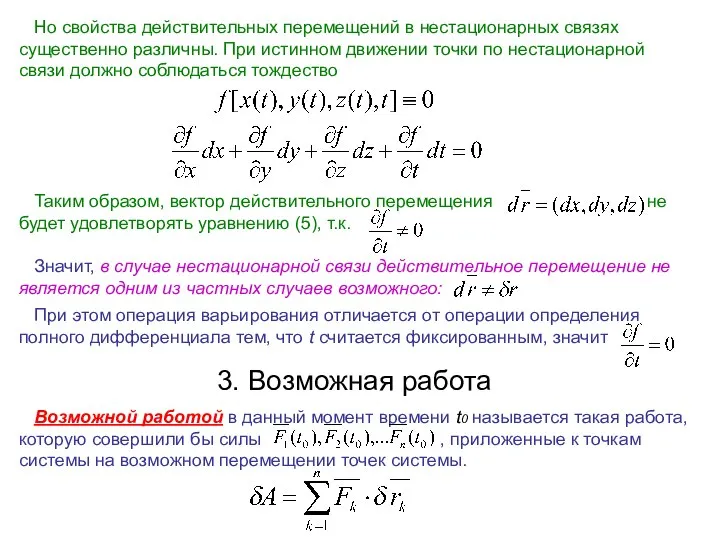
- 6. Но свойства действительных перемещений в нестационарных связях существенно различны. При истинном движении точки по нестационарной связи
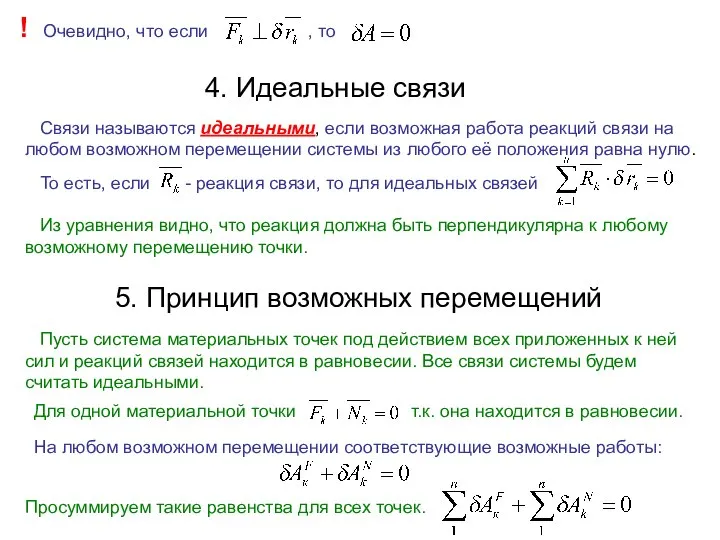
- 7. ! Очевидно, что если , то 4. Идеальные связи Связи называются идеальными, если возможная работа реакций
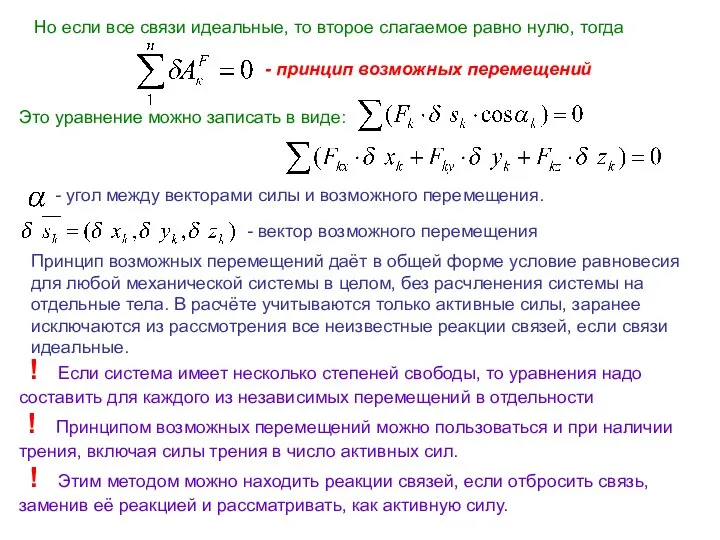
- 8. Но если все связи идеальные, то второе слагаемое равно нулю, тогда - принцип возможных перемещений Это
- 10. Скачать презентацию
Слайд 3Классификация связей:
1) Голономные – в их уравнении связей нет производных от
Классификация связей:
1) Голономные – в их уравнении связей нет производных от
Слайд 4 Где – некоторый параметр. Функции (2) должны обращать уравнение (1) в
Где – некоторый параметр. Функции (2) должны обращать уравнение (1) в
Слайд 5 Этот вектор направлен по касательной к кинематически возможной траектории точки М.
Этот вектор направлен по касательной к кинематически возможной траектории точки М.
Слайд 6 Но свойства действительных перемещений в нестационарных связях существенно различны. При истинном
Но свойства действительных перемещений в нестационарных связях существенно различны. При истинном
Слайд 7! Очевидно, что если , то
4. Идеальные связи
Связи называются
! Очевидно, что если , то
4. Идеальные связи
Связи называются
Слайд 8 Но если все связи идеальные, то второе слагаемое равно нулю, тогда
Но если все связи идеальные, то второе слагаемое равно нулю, тогда
 Виды излучений
Виды излучений Модернизация козлового крана
Модернизация козлового крана Зубонарезание. Разновидности зубчатых колес
Зубонарезание. Разновидности зубчатых колес Деформированное состояние в точке. Обобщенный закон Гука. Лекция 10
Деформированное состояние в точке. Обобщенный закон Гука. Лекция 10 Показатели качества электроэнергии. Влияние качества электроэнергии на работу электроприемников зданий
Показатели качества электроэнергии. Влияние качества электроэнергии на работу электроприемников зданий Механические передачи. Цилиндрические и конические зубчатые передачи. (Лекция 5)
Механические передачи. Цилиндрические и конические зубчатые передачи. (Лекция 5) Геомеханика. Лекция 1
Геомеханика. Лекция 1 з-н сохр.имп
з-н сохр.имп Движение материальной точки. Задачи
Движение материальной точки. Задачи Строение атома
Строение атома Применение физических законов при решении задач по астрофизике
Применение физических законов при решении задач по астрофизике Гидравлический домкрат в быту
Гидравлический домкрат в быту ВКР: Совершенствование технического обслуживания и ремонта автомобилей в условиях ООО Авто-транс г. Москва
ВКР: Совершенствование технического обслуживания и ремонта автомобилей в условиях ООО Авто-транс г. Москва Электростатика. Цели и задачи
Электростатика. Цели и задачи Работа при повороте тела. Кинетическая энергия вращающегося твердого тела
Работа при повороте тела. Кинетическая энергия вращающегося твердого тела Теория Волн Ральфа Эллиота
Теория Волн Ральфа Эллиота Формирование экспериментального метода решения задач на уроках физики
Формирование экспериментального метода решения задач на уроках физики Антенно-фидерные устройства, типы и классификация антенн
Антенно-фидерные устройства, типы и классификация антенн Электромагнитные волны
Электромагнитные волны 3 slides
3 slides Ионное (катодное) распыление
Ионное (катодное) распыление Презентация на тему Трансформаторы
Презентация на тему Трансформаторы  Альтернативные источники энергии
Альтернативные источники энергии Основы термодинамики. Решение задач
Основы термодинамики. Решение задач Молекулярно-кинетическая теория
Молекулярно-кинетическая теория Кафедра общей и прикладной геофизики
Кафедра общей и прикладной геофизики Құрамында талшықтары көп полимерлі композитті наноматериалдар
Құрамында талшықтары көп полимерлі композитті наноматериалдар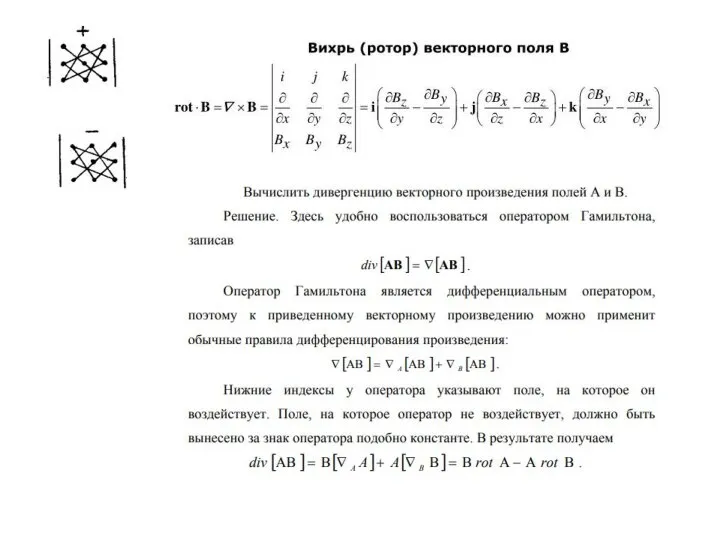 Вихрь (ротор) векторного поля
Вихрь (ротор) векторного поля