- Физические основы механики

Содержание
- 2. Кинематика. Основные понятия и величины. Предмет кинематики: Описание движения и связи между величинами, характеризующими это движение
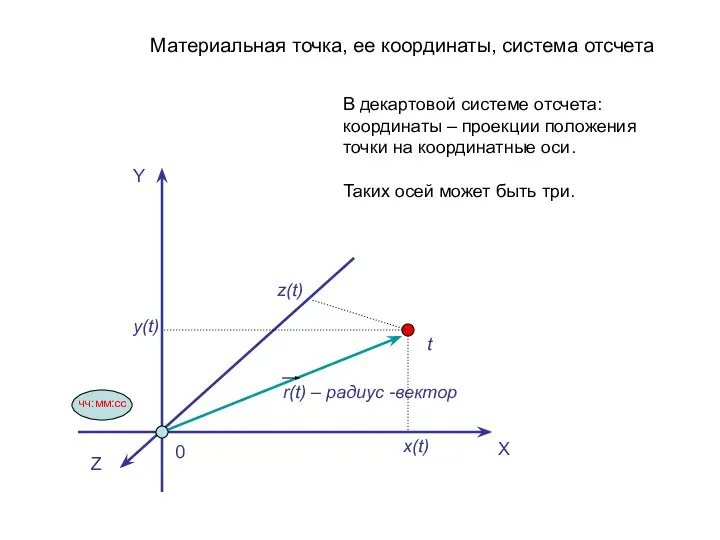
- 3. Материальная точка, ее координаты, система отсчета Y X Z z(t) y(t) x(t) 0 чч:мм:сс t r(t)
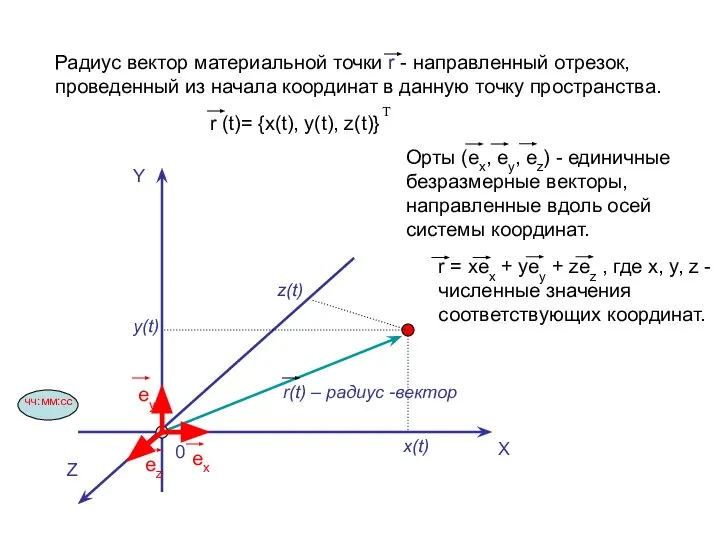
- 4. Y X Z z(t) y(t) x(t) 0 чч:мм:сс r(t) – радиус -вектор Радиус вектор материальной точки
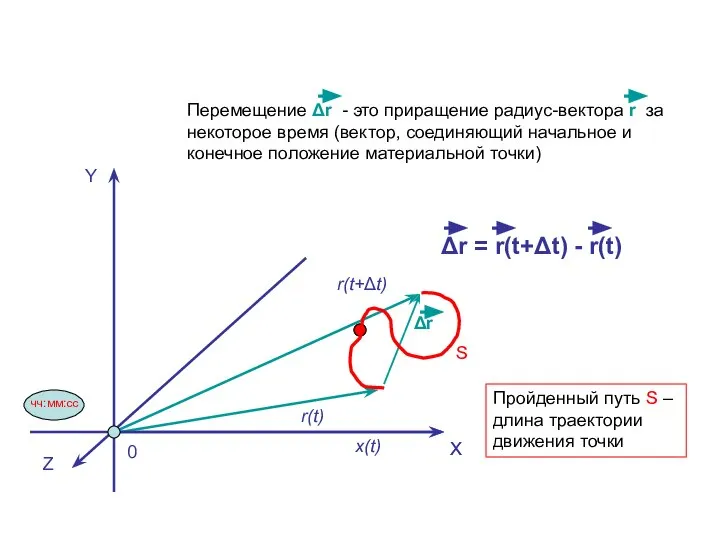
- 5. Перемещение, пройденный путь S X x(t) Δr S Перемещение Δr - это приращение радиус-вектора r за
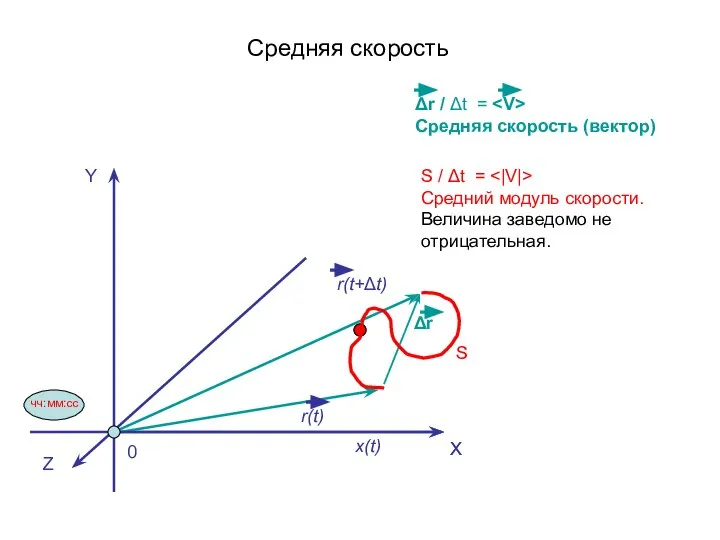
- 6. Средняя скорость Δr / Δt = Средняя скорость (вектор) S / Δt = Средний модуль скорости.
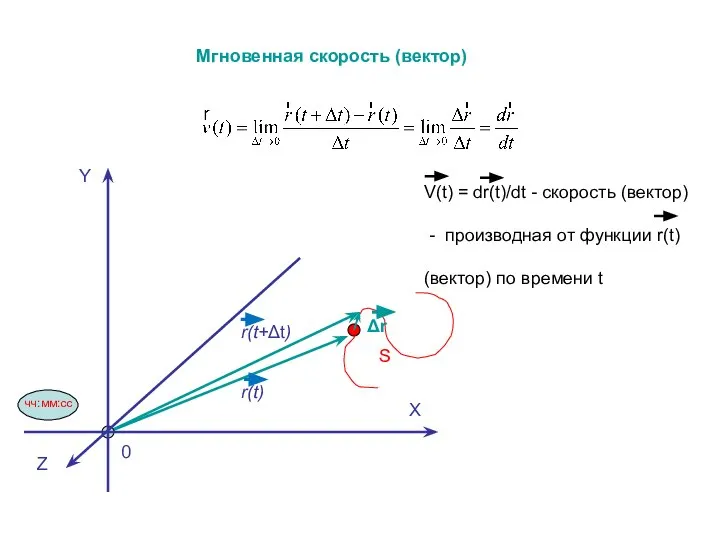
- 7. Y X Δr S r(t) Мгновенная скорость (вектор) r(t+Δt) Z 0 чч:мм:сс V(t) = dr(t)/dt -
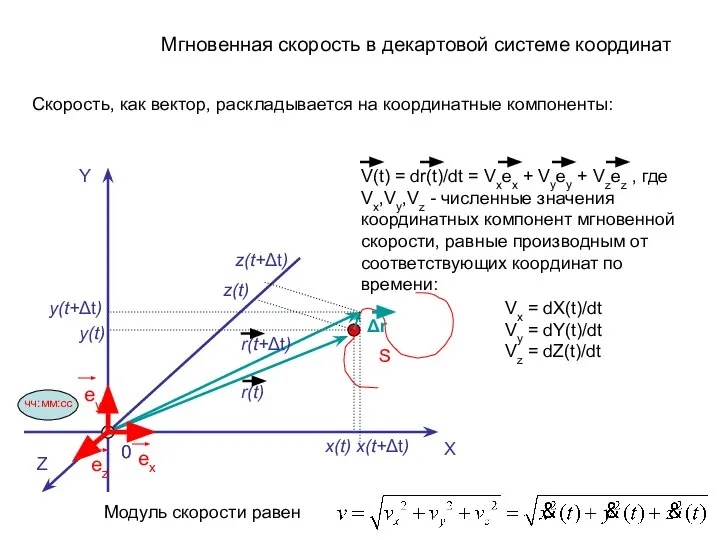
- 8. Y X z(t) y(t) x(t) x(t+Δt) Δr S r(t) r(t+Δt) Z 0 чч:мм:сс Vx = dX(t)/dt
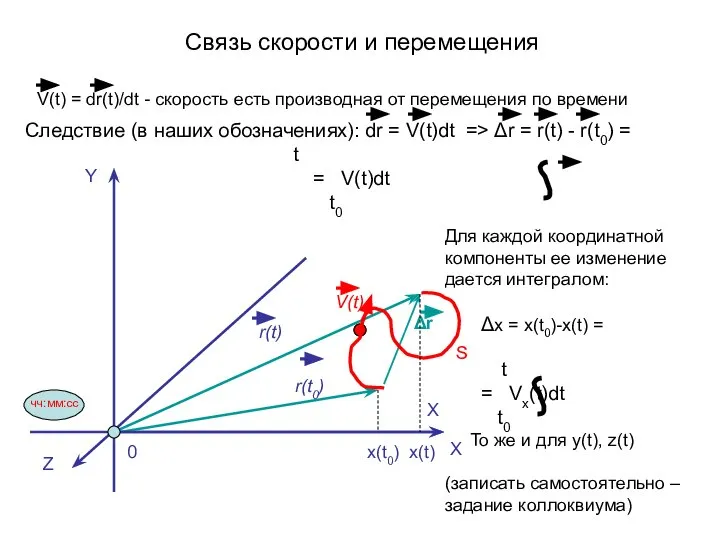
- 9. X Δr S Y X Z 0 чч:мм:сс r(t0) r(t) V(t) Следствие (в наших обозначениях): dr
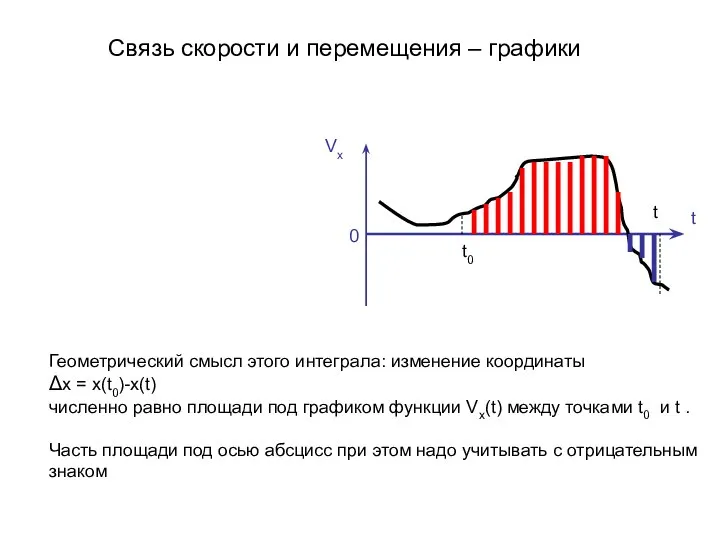
- 10. Vх t 0 Геометрический смысл этого интеграла: изменение координаты Δx = x(t0)-x(t) численно равно площади под
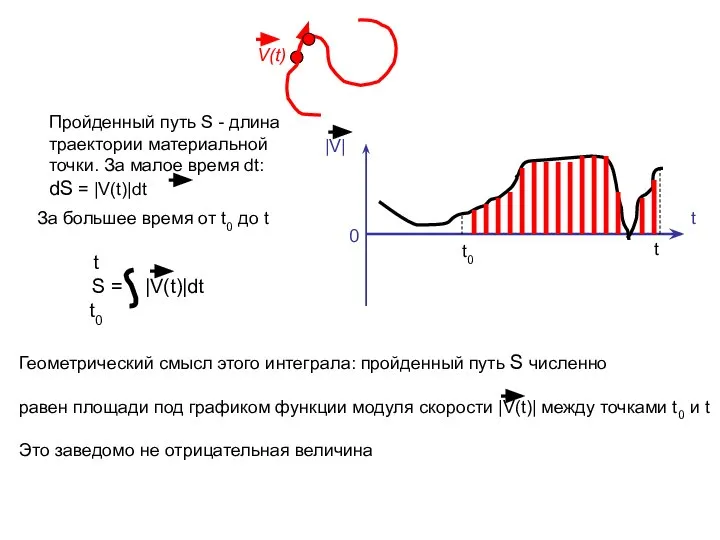
- 11. t 0 За большее время от t0 до t t S = |V(t)|dt t0 Геометрический смысл
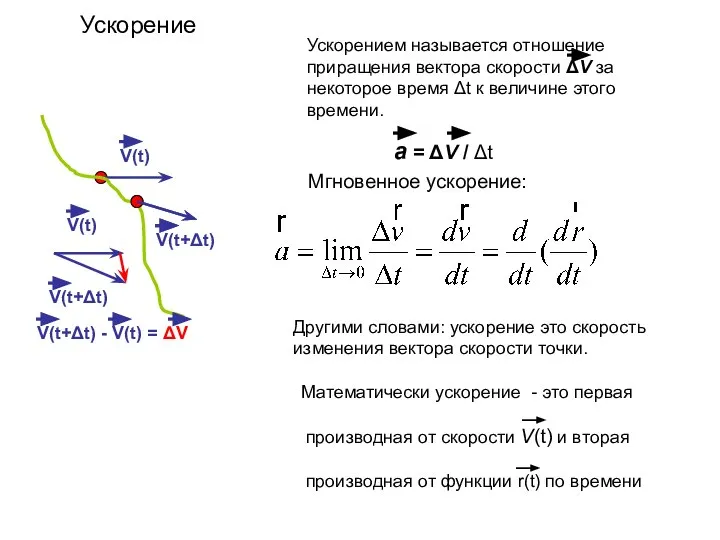
- 12. V(t) V(t+Δt) V(t) V(t+Δt) V(t+Δt) - V(t) = ΔV Другими словами: ускорение это скорость изменения вектора
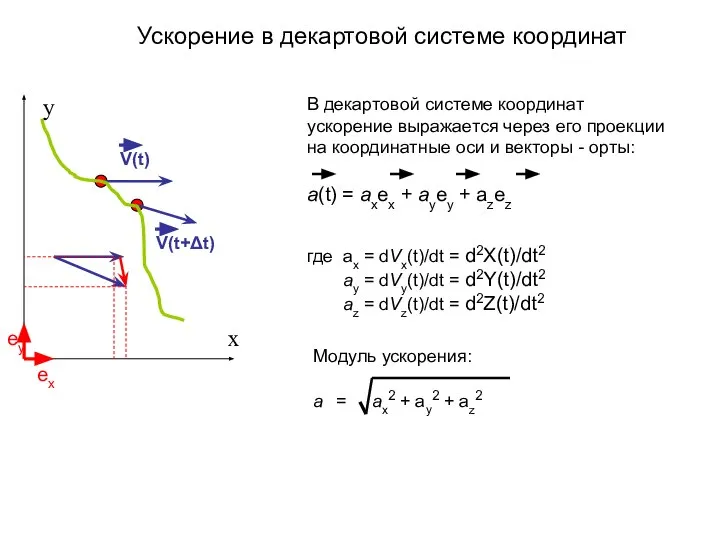
- 13. V(t) V(t+Δt) x y В декартовой системе координат ускорение выражается через его проекции на координатные оси
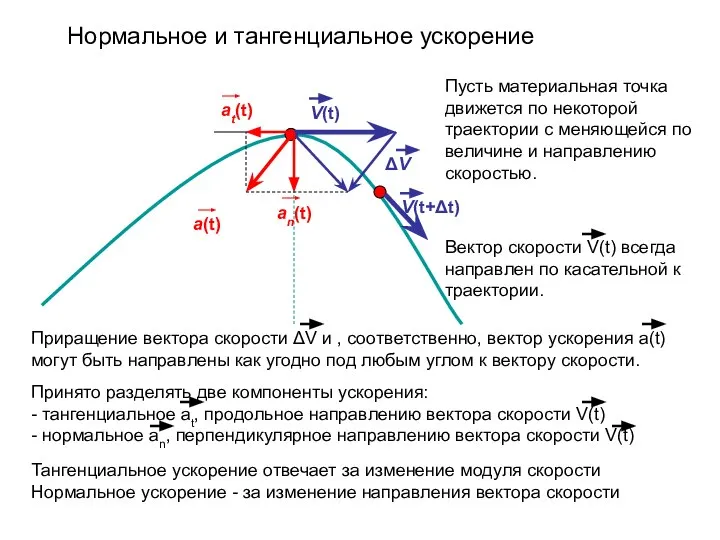
- 14. V(t) V(t+Δt) а(t) аt(t) аn(t) ΔV Пусть материальная точка движется по некоторой траектории с меняющейся по
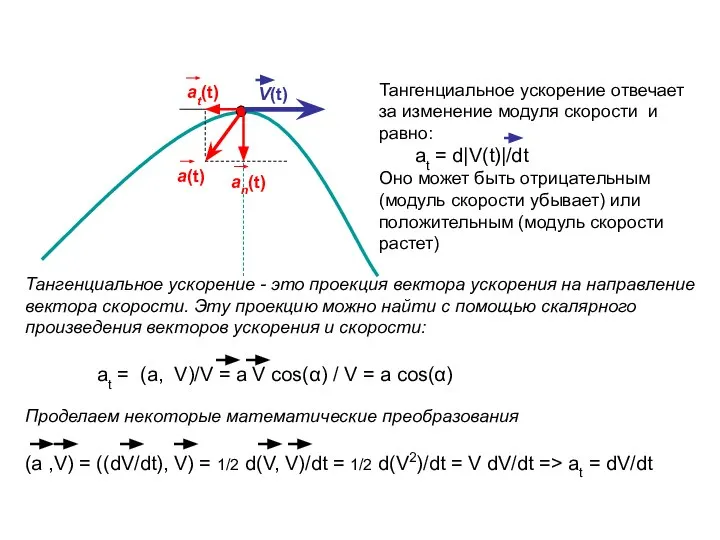
- 15. Тангенциальное ускорение отвечает за изменение модуля скорости и равно: аt = d|V(t)|/dt Оно может быть отрицательным
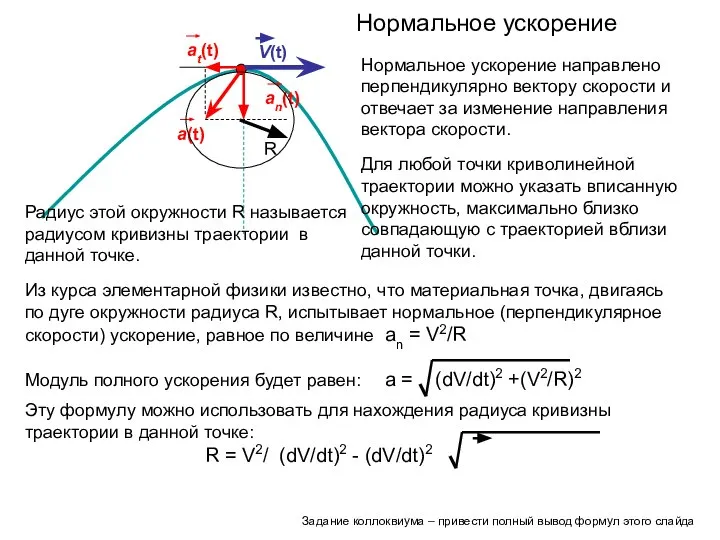
- 16. V(t) а(t) аt(t) аn(t) Нормальное ускорение направлено перпендикулярно вектору скорости и отвечает за изменение направления вектора
- 17. Абсолютно твердое тело: протяженный объект (система материальных точек) расстояния между которыми не изменяются в процессе движения
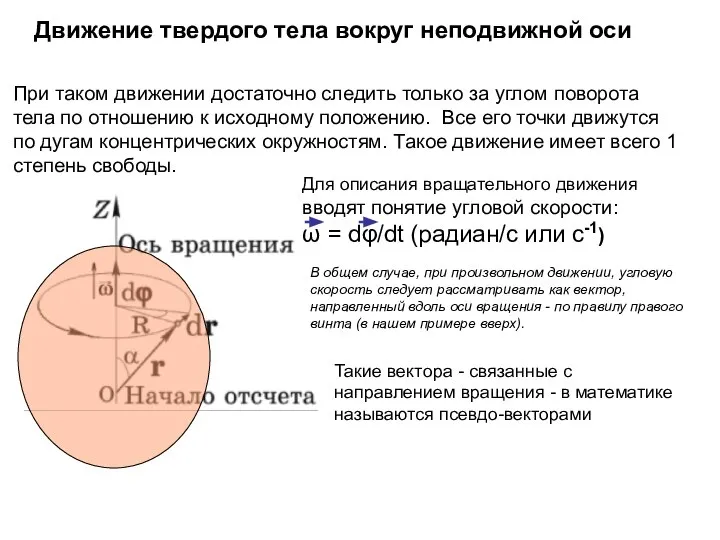
- 18. При таком движении достаточно следить только за углом поворота тела по отношению к исходному положению. Все
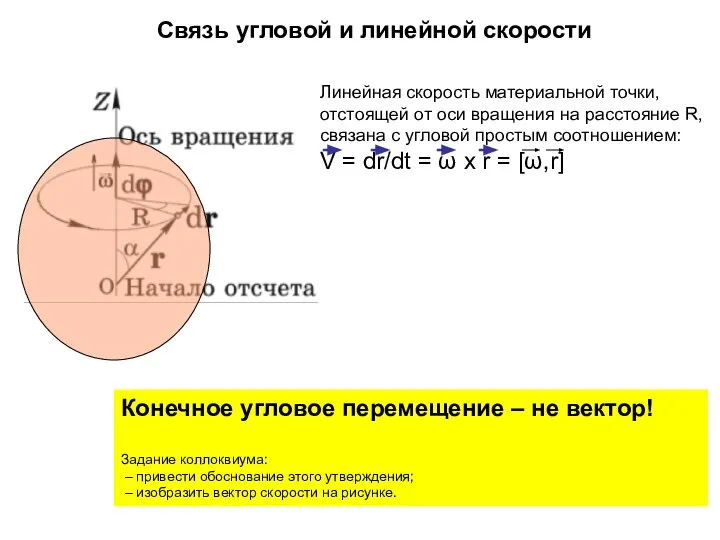
- 19. Связь угловой и линейной скорости Линейная скорость материальной точки, отстоящей от оси вращения на расстояние R,
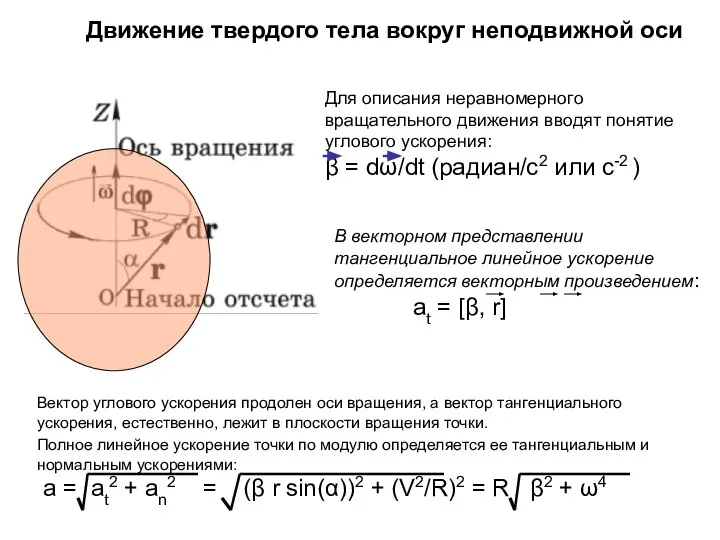
- 20. Для описания неравномерного вращательного движения вводят понятие углового ускорения: β = dω/dt (радиан/с2 или с-2 )
- 22. Скачать презентацию
Слайд 3Материальная точка, ее координаты, система отсчета
Y
X
Z
z(t)
y(t)
x(t)
0
чч:мм:сс
t
r(t) – радиус -вектор
В декартовой системе
Материальная точка, ее координаты, система отсчета
Y
X
Z
z(t)
y(t)
x(t)
0
чч:мм:сс
t
r(t) – радиус -вектор
В декартовой системе
Слайд 4Y
X
Z
z(t)
y(t)
x(t)
0
чч:мм:сс
r(t) – радиус -вектор
Радиус вектор материальной точки r - направленный отрезок,
проведенный
Y
X
Z
z(t)
y(t)
x(t)
0
чч:мм:сс
r(t) – радиус -вектор
Радиус вектор материальной точки r - направленный отрезок,
проведенный
Слайд 5Перемещение, пройденный путь S
X
x(t)
Δr
S
Перемещение Δr - это приращение радиус-вектора r за некоторое
Перемещение, пройденный путь S
X
x(t)
Δr
S
Перемещение Δr - это приращение радиус-вектора r за некоторое
Слайд 6Средняя скорость
Δr / Δt =
Средняя скорость (вектор)
S / Δt = <|V|>
Средний
Средняя скорость
Δr / Δt = S / Δt = <|V|>
Средняя скорость (вектор)
Средний
Слайд 7Y
X
Δr
S
r(t)
Мгновенная скорость (вектор)
r(t+Δt)
Z
0
чч:мм:сс
V(t) = dr(t)/dt - скорость (вектор)
- производная от функции
Y
X
Δr
S
r(t)
Мгновенная скорость (вектор)
r(t+Δt)
Z
0
чч:мм:сс
V(t) = dr(t)/dt - скорость (вектор)
- производная от функции
Слайд 8Y
X
z(t)
y(t)
x(t) x(t+Δt)
Δr
S
r(t)
r(t+Δt)
Z
0
чч:мм:сс
Vx = dX(t)/dt
Vy = dY(t)/dt
Vz = dZ(t)/dt
z(t+Δt)
y(t+Δt)
0
ey
ex
ez
V(t) = dr(t)/dt = Vxex
Y
X
z(t)
y(t)
x(t) x(t+Δt)
Δr
S
r(t)
r(t+Δt)
Z
0
чч:мм:сс
Vx = dX(t)/dt
Vy = dY(t)/dt
Vz = dZ(t)/dt
z(t+Δt)
y(t+Δt)
0
ey
ex
ez
V(t) = dr(t)/dt = Vxex
Слайд 9X
Δr
S
Y
X
Z
0
чч:мм:сс
r(t0)
r(t)
V(t)
Следствие (в наших обозначениях): dr = V(t)dt => Δr = r(t) -
X
Δr
S
Y
X
Z
0
чч:мм:сс
r(t0)
r(t)
V(t)
Следствие (в наших обозначениях): dr = V(t)dt => Δr = r(t) -
Слайд 10Vх
t
0
Геометрический смысл этого интеграла: изменение координаты
Δx = x(t0)-x(t)
численно равно площади
Vх
t
0
Геометрический смысл этого интеграла: изменение координаты
Δx = x(t0)-x(t)
численно равно площади
Слайд 11t
0
За большее время от t0 до t
t
S = |V(t)|dt
t
0
За большее время от t0 до t
t
S = |V(t)|dt
Слайд 12V(t)
V(t+Δt)
V(t)
V(t+Δt)
V(t+Δt) - V(t) = ΔV
Другими словами: ускорение это скорость изменения вектора скорости
V(t)
V(t+Δt)
V(t)
V(t+Δt)
V(t+Δt) - V(t) = ΔV
Другими словами: ускорение это скорость изменения вектора скорости
Слайд 13V(t)
V(t+Δt)
x
y
В декартовой системе координат ускорение выражается через его проекции на координатные оси
V(t)
V(t+Δt)
x
y
В декартовой системе координат ускорение выражается через его проекции на координатные оси
Слайд 14V(t)
V(t+Δt)
а(t)
аt(t)
аn(t)
ΔV
Пусть материальная точка движется по некоторой траектории с меняющейся по величине и
V(t)
V(t+Δt)
а(t)
аt(t)
аn(t)
ΔV
Пусть материальная точка движется по некоторой траектории с меняющейся по величине и
Слайд 15Тангенциальное ускорение отвечает за изменение модуля скорости и равно:
аt = d|V(t)|/dt
Оно может
Тангенциальное ускорение отвечает за изменение модуля скорости и равно:
аt = d|V(t)|/dt
Оно может
Слайд 16V(t)
а(t)
аt(t)
аn(t)
Нормальное ускорение направлено перпендикулярно вектору скорости и отвечает за изменение направления вектора
V(t)
а(t)
аt(t)
аn(t)
Нормальное ускорение направлено перпендикулярно вектору скорости и отвечает за изменение направления вектора
Слайд 17Абсолютно твердое тело: протяженный объект (система материальных точек) расстояния между которыми не
Абсолютно твердое тело: протяженный объект (система материальных точек) расстояния между которыми не
Слайд 18При таком движении достаточно следить только за углом поворота тела по отношению
При таком движении достаточно следить только за углом поворота тела по отношению
Слайд 19Связь угловой и линейной скорости
Линейная скорость материальной точки, отстоящей от оси вращения
Связь угловой и линейной скорости
Линейная скорость материальной точки, отстоящей от оси вращения
Слайд 20Для описания неравномерного вращательного движения вводят понятие углового ускорения:
β = dω/dt (радиан/с2
Для описания неравномерного вращательного движения вводят понятие углового ускорения:
β = dω/dt (радиан/с2
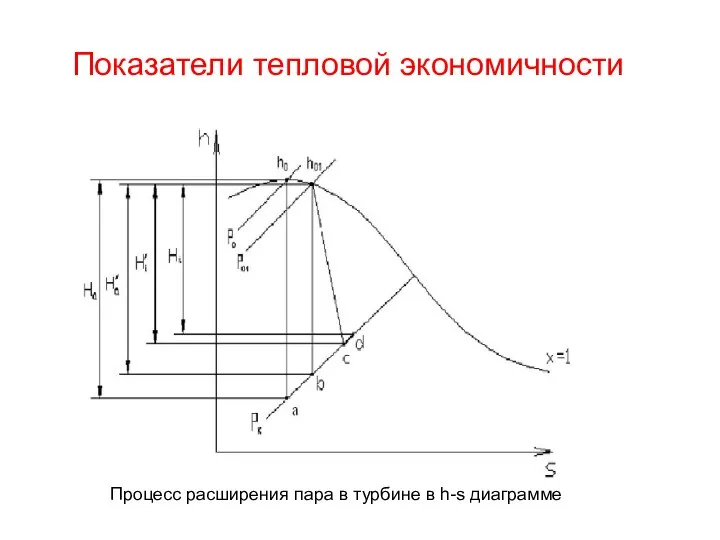 Показатели тепловой экономичности
Показатели тепловой экономичности Отсчёт по производственной практике
Отсчёт по производственной практике Презентация ЛЕКЦИЯ №11.0 колебания
Презентация ЛЕКЦИЯ №11.0 колебания Применение конденсаторов
Применение конденсаторов Презентация на тему Механические явления в природе
Презентация на тему Механические явления в природе  Основные положения МКТ
Основные положения МКТ Электрохимические системы
Электрохимические системы Положение и движение точки в пространстве
Положение и движение точки в пространстве Проводники и диэлектрики в электрическом поле. Решение задач
Проводники и диэлектрики в электрическом поле. Решение задач Действие жидкости и газа на погружённое в них тело. Урок физики в 7 классе
Действие жидкости и газа на погружённое в них тело. Урок физики в 7 классе Расчет размерных цепей
Расчет размерных цепей Презентация на тему Атмосфера и атмосферное давление (7 класс)
Презентация на тему Атмосфера и атмосферное давление (7 класс)  Лазер, устройство лазера
Лазер, устройство лазера Магнитные материалы. Гистерезис. Применение ферромагнитных материалов
Магнитные материалы. Гистерезис. Применение ферромагнитных материалов Измерение физических величин. 7 класс
Измерение физических величин. 7 класс Температура. Тепловое равновесие
Температура. Тепловое равновесие Ремонт электрических машин всех типов
Ремонт электрических машин всех типов Аттосекундная регистрация динамики фотоионизации атомов
Аттосекундная регистрация динамики фотоионизации атомов Элементарные частицы
Элементарные частицы Взаимодействие рентгеновского излучения с веществом
Взаимодействие рентгеновского излучения с веществом Динамика и устойчивость сооружений
Динамика и устойчивость сооружений Презентация на тему Электрический ток
Презентация на тему Электрический ток  Измеряем длину взвешиванием
Измеряем длину взвешиванием Физика в медицине. Элективный курс предпрофильной подготовки обучающихся 9-х классов
Физика в медицине. Элективный курс предпрофильной подготовки обучающихся 9-х классов Влияние геометрической формы проводника спирали на электродинамические характеристики спиральной замедляющей системы
Влияние геометрической формы проводника спирали на электродинамические характеристики спиральной замедляющей системы ИК-спектроскопия
ИК-спектроскопия Восстановление долот PDC
Восстановление долот PDC Зубчатые передачи
Зубчатые передачи