- Интеллектуальные технологии смешанной реальности для аэрокосмических систем

Содержание
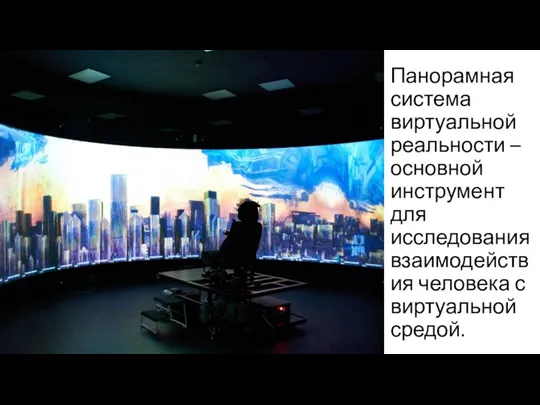
- 2. Панорамная система виртуальной реальности – основной инструмент для исследования взаимодействия человека с виртуальной средой.
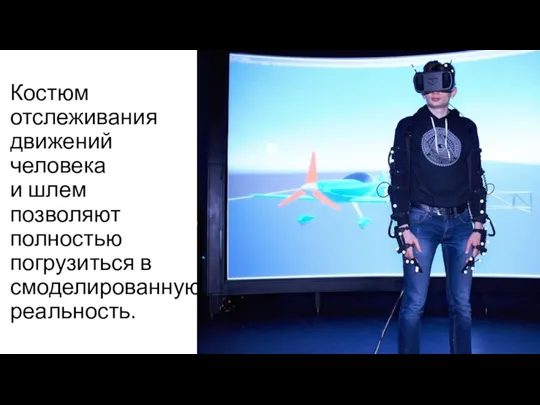
- 3. Костюм отслеживания движений человека и шлем позволяют полностью погрузиться в смоделированную реальность.
- 4. Для реализации виртуальной среды необходимо создание математической модели подвижного объекта и его визуализации.
- 5. Динамическая имитация для пилота (оператора) и согласование с визуальным окружением
- 6. Результат нашей работы –виртуальное окружение, в котором имитируется поведение реального объекта.
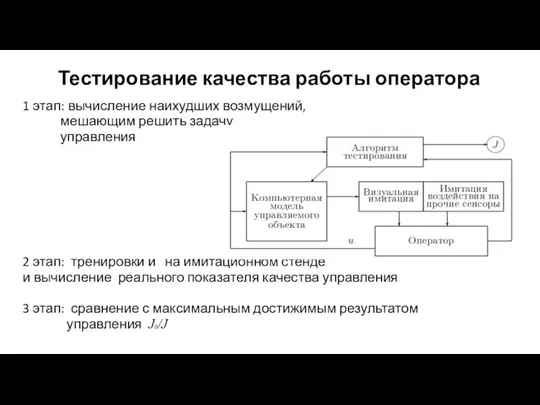
- 7. Тестирование качества работы оператора 1 этап: вычисление наихудших возмущений, мешающим решить задачу управления 2 этап: тренировки
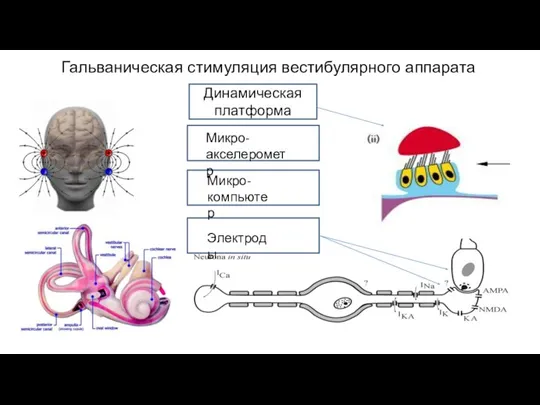
- 8. Гальваническая стимуляция вестибулярного аппарата Микро- акселерометр Микро- компьютер Электроды Динамическая платформа
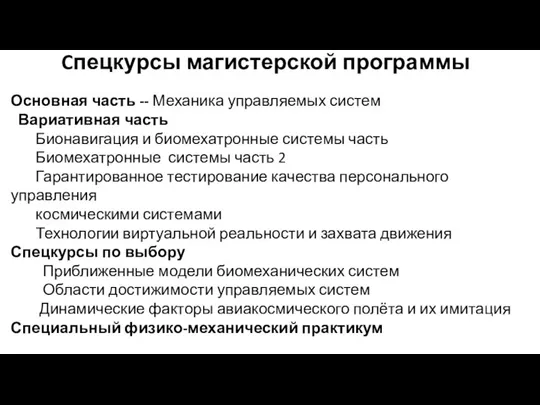
- 9. Основная часть -- Механика управляемых систем Вариативная часть Бионавигация и биомехатронные системы часть Биомехатронные системы часть
- 11. Скачать презентацию
Слайд 2Панорамная система виртуальной реальности – основной инструмент
для исследования взаимодействия человека с
Панорамная система виртуальной реальности – основной инструмент для исследования взаимодействия человека с
Слайд 3Костюм отслеживания движений
человека
и шлем
позволяют полностью погрузиться в смоделированную реальность.
Костюм отслеживания движений
человека
и шлем
позволяют полностью погрузиться в смоделированную реальность.
Слайд 4Для реализации виртуальной среды необходимо создание математической модели подвижного объекта и его
Для реализации виртуальной среды необходимо создание математической модели подвижного объекта и его

Слайд 5 Динамическая имитация для пилота
(оператора) и согласование с визуальным окружением
Динамическая имитация для пилота
(оператора) и согласование с визуальным окружением

Слайд 6Результат нашей работы –виртуальное окружение, в котором имитируется поведение реального объекта.
Результат нашей работы –виртуальное окружение, в котором имитируется поведение реального объекта.
Слайд 7Тестирование качества работы оператора
1 этап: вычисление наихудших возмущений,
мешающим решить задачу
Тестирование качества работы оператора
1 этап: вычисление наихудших возмущений,
мешающим решить задачу
Слайд 8Гальваническая стимуляция вестибулярного аппарата
Микро-
акселерометр
Микро-
компьютер
Электроды
Динамическая платформа
Гальваническая стимуляция вестибулярного аппарата
Микро-
акселерометр
Микро-
компьютер
Электроды
Динамическая платформа
Слайд 9Основная часть -- Механика управляемых систем
Вариативная часть
Бионавигация и биомехатронные системы часть
Основная часть -- Механика управляемых систем
Вариативная часть
Бионавигация и биомехатронные системы часть
 Физические основы полупроводниковой микроэлектроники
Физические основы полупроводниковой микроэлектроники Технология критического мышления на уроках физики
Технология критического мышления на уроках физики Презентация на тему Физика вокруг нас
Презентация на тему Физика вокруг нас  Свойства звуковых волн
Свойства звуковых волн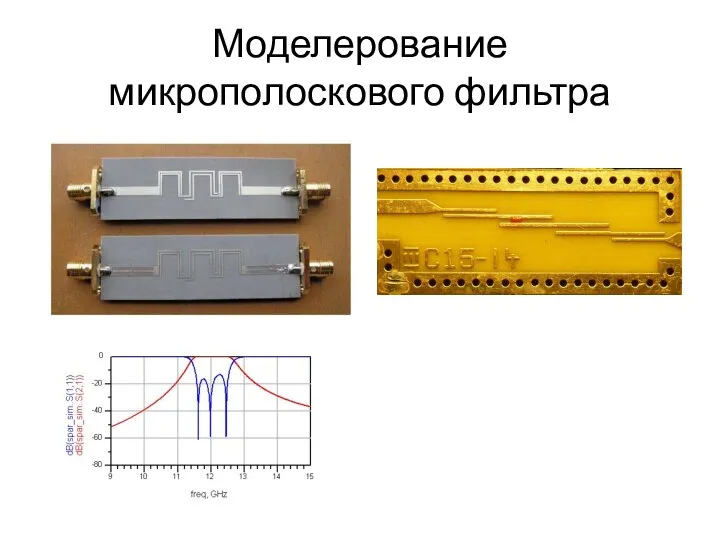 Моделерование микрополоскового фильтра
Моделерование микрополоскового фильтра Презентация на тему Реактивное движение
Презентация на тему Реактивное движение  Магнетизм. Структурно-логическая схема. Условные обозначения
Магнетизм. Структурно-логическая схема. Условные обозначения Терагерцевое излучение
Терагерцевое излучение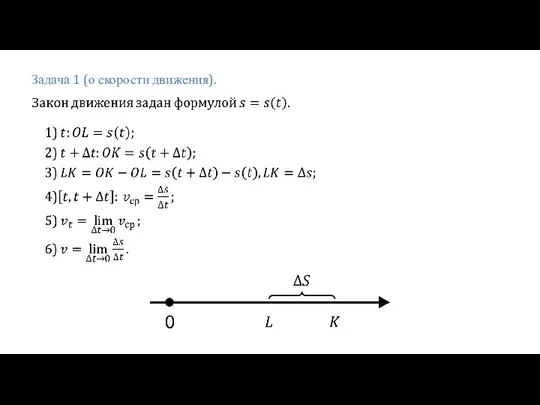 Задача о скорости движения
Задача о скорости движения Задача по динамике
Задача по динамике Деятельностный подход в преподавании физики
Деятельностный подход в преподавании физики Движение заряженной частицы в электрическом и магнитном полях
Движение заряженной частицы в электрическом и магнитном полях Электромагнитные явления
Электромагнитные явления Ферромагнитные динамические амортизаторы
Ферромагнитные динамические амортизаторы Марковские процессы. Правило
Марковские процессы. Правило Идеальная жидкость. Вязкость жидкости. Ламинарный и турбулентный поток
Идеальная жидкость. Вязкость жидкости. Ламинарный и турбулентный поток Напряженность электрического поля
Напряженность электрического поля ЭЛЕКТРИЧЕСТВО В БЫТУ
ЭЛЕКТРИЧЕСТВО В БЫТУ Вклад Д.И. Менделеева в развитие метрологии
Вклад Д.И. Менделеева в развитие метрологии Как подготовить велосепед к сезону
Как подготовить велосепед к сезону Количество теплоты. Единицы количества теплоты. Удельная теплоемкость
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость Магнитный поток
Магнитный поток Наблюдение интерференции и дифракции свет
Наблюдение интерференции и дифракции свет Теория горения и взрывов. Классификация процессов горения газов, жидкостей и твердых веществ. Лекция 7.1
Теория горения и взрывов. Классификация процессов горения газов, жидкостей и твердых веществ. Лекция 7.1 Замена тросика на энкодере ШП
Замена тросика на энкодере ШП Элементы статики и атмосферное давление в сжимаемой среде. Приведенное статическое давление и эпюры давления в сжимаемых средах
Элементы статики и атмосферное давление в сжимаемой среде. Приведенное статическое давление и эпюры давления в сжимаемых средах Лекция 25
Лекция 25 Методы наблюдения и регистрации элементарных частиц
Методы наблюдения и регистрации элементарных частиц