- Кинематика. Курс лекций по теоретической механике

Содержание
- 2. Содержание Лекция 4. Плоскопараллельное движение твердого тела. Разложение плоского движения на поступательное и вращательное движения. Уравнения
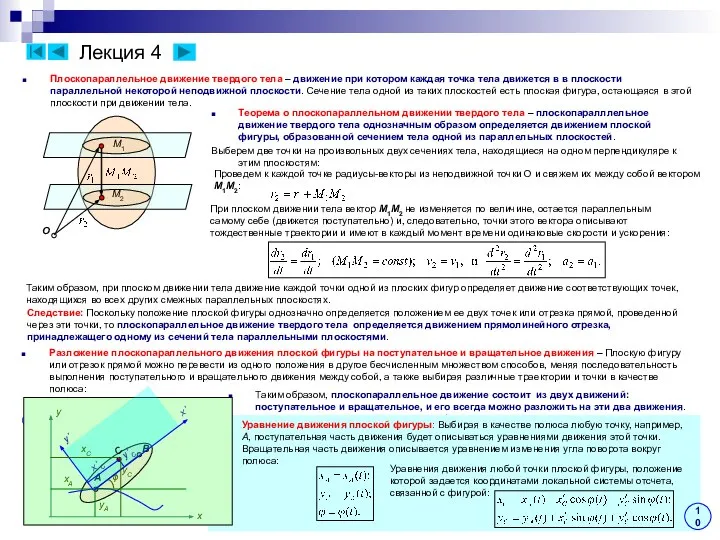
- 3. Лекция 4 Плоскопараллельное движение твердого тела – движение при котором каждая точка тела движется в в
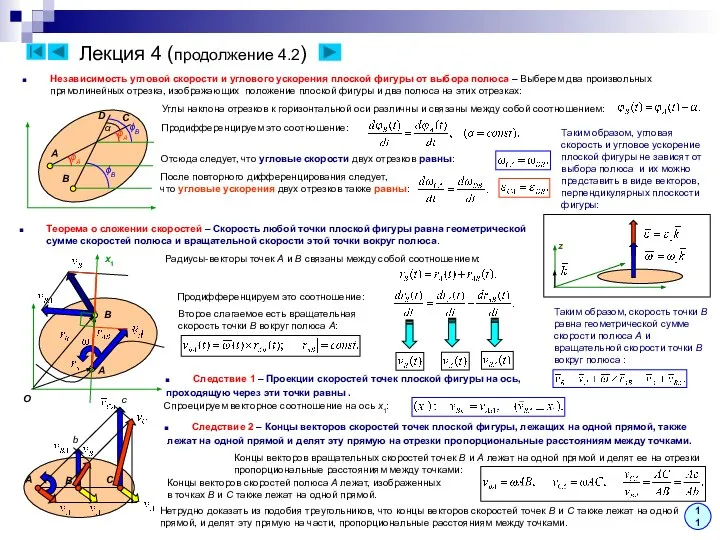
- 4. Лекция 4 (продолжение 4.2) Независимость угловой скорости и углового ускорения плоской фигуры от выбора полюса –
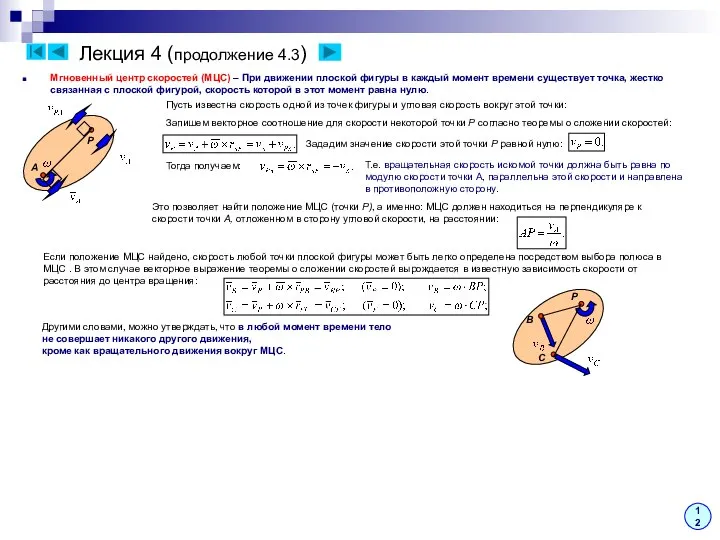
- 5. Лекция 4 (продолжение 4.3) Мгновенный центр скоростей (МЦС) – При движении плоской фигуры в каждый момент
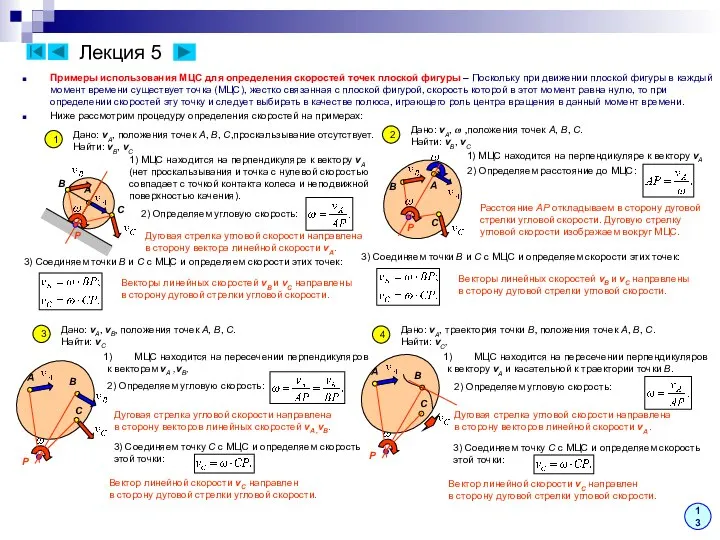
- 6. Лекция 5 Примеры использования МЦС для определения скоростей точек плоской фигуры – Поскольку при движении плоской
- 8. Скачать презентацию
Слайд 2Содержание
Лекция 4. Плоскопараллельное движение твердого тела. Разложение плоского движения на поступательное и
Содержание
Лекция 4. Плоскопараллельное движение твердого тела. Разложение плоского движения на поступательное и
Слайд 3Лекция 4
Плоскопараллельное движение твердого тела – движение при котором каждая точка тела
Лекция 4
Плоскопараллельное движение твердого тела – движение при котором каждая точка тела
Слайд 4Лекция 4 (продолжение 4.2)
Независимость угловой скорости и углового ускорения плоской фигуры от
Лекция 4 (продолжение 4.2)
Независимость угловой скорости и углового ускорения плоской фигуры от
Слайд 5Лекция 4 (продолжение 4.3)
Мгновенный центр скоростей (МЦС) – При движении плоской фигуры
Лекция 4 (продолжение 4.3)
Мгновенный центр скоростей (МЦС) – При движении плоской фигуры
Слайд 6Лекция 5
Примеры использования МЦС для определения скоростей точек плоской фигуры – Поскольку
Лекция 5
Примеры использования МЦС для определения скоростей точек плоской фигуры – Поскольку
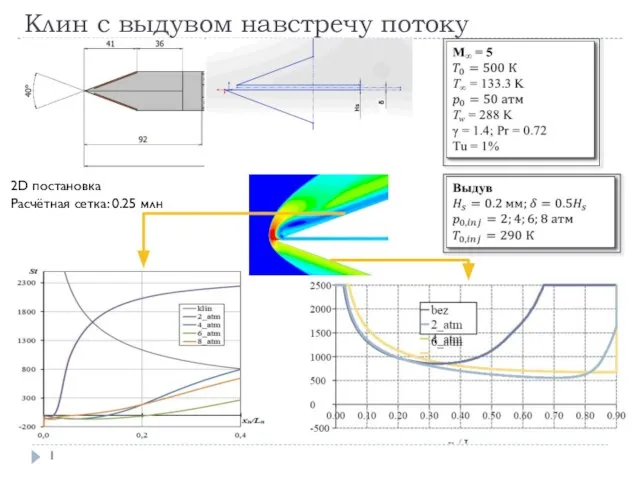 Клин с выдувом навстречу потоку
Клин с выдувом навстречу потоку Движение под углом к горизонту
Движение под углом к горизонту Импульс материальной точки. Другая формулировка второго закона Ньютона
Импульс материальной точки. Другая формулировка второго закона Ньютона Состояние вещества. Тест
Состояние вещества. Тест Амперметр. Измерение силы тока
Амперметр. Измерение силы тока Презентация на тему Конвекция. Излучение
Презентация на тему Конвекция. Излучение  Курс лекций по теоретической механике. Статика
Курс лекций по теоретической механике. Статика Физические свойства соленой воды
Физические свойства соленой воды Игра-КВН Первый урок в 8 классе
Игра-КВН Первый урок в 8 классе Последовательное соединение
Последовательное соединение opredelenie_koordinaty_dvizh_tela
opredelenie_koordinaty_dvizh_tela ФОМНЭ_2022_Лекция № 2
ФОМНЭ_2022_Лекция № 2 Равновесие сил с учётом трения покоя, сцепления
Равновесие сил с учётом трения покоя, сцепления Конструирование экспериментальных заданий по физике с использованием ментальных карт
Конструирование экспериментальных заданий по физике с использованием ментальных карт Сборка, регулировка и испытание охлаждения и смазки двигателей
Сборка, регулировка и испытание охлаждения и смазки двигателей Открытый урок по физике. Основной закон электростатики - закон Кулона
Открытый урок по физике. Основной закон электростатики - закон Кулона Исследование деформаций в тонкостенной цилиндрической оболочке
Исследование деформаций в тонкостенной цилиндрической оболочке Физика вокруг на
Физика вокруг на Постоянные магниты
Постоянные магниты Свойства полупроводниковых диодов
Свойства полупроводниковых диодов Биологическое действие радиоактивных излучений
Биологическое действие радиоактивных излучений Презентация на тему Сила трения скольжения
Презентация на тему Сила трения скольжения  Сила трения
Сила трения Методы расчетов резисторных схем постоянного тока.11 класс
Методы расчетов резисторных схем постоянного тока.11 класс Термодинамика. Подготовка к контрольной работе
Термодинамика. Подготовка к контрольной работе Построение изображений, полученных с помощью линз
Построение изображений, полученных с помощью линз Электроосветительные приборы
Электроосветительные приборы Взаимодействие тел
Взаимодействие тел