- Курс лекций по теоретической механике. Статика

Содержание
- 2. Содержание Лекция 1. Введение. Основные понятия. Аксиомы статики. Связи и реакции связей. Лекция 2. Система сходящихся
- 3. Лекция 1 Введение Под названием “механика” объединяется ряд наук, изучающих механическое движение и механическое взаимодействие твердых
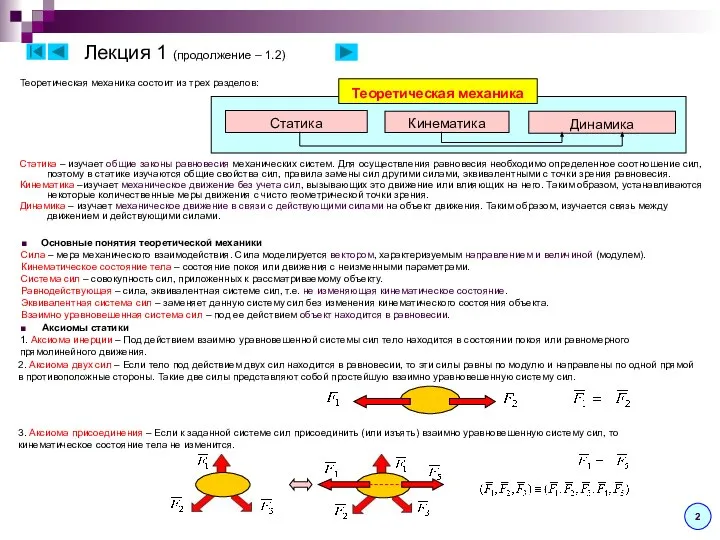
- 4. Лекция 1 (продолжение – 1.2) Теоретическая механика состоит из трех разделов: Статика – изучает общие законы
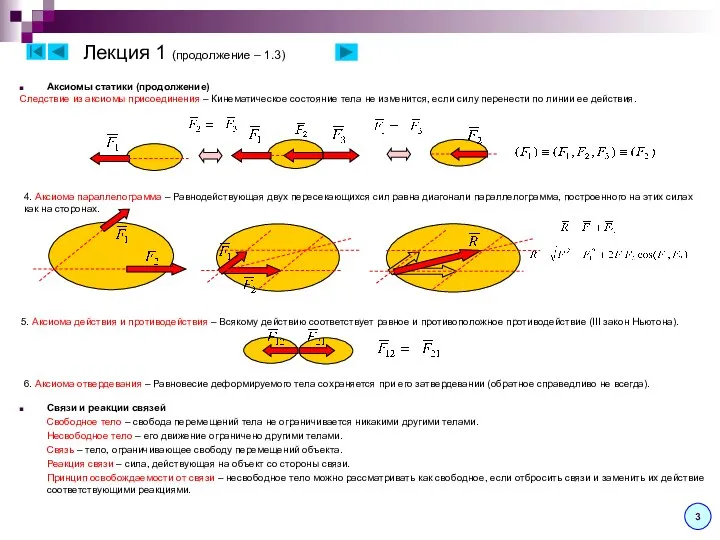
- 5. Лекция 1 (продолжение – 1.3) Аксиомы статики (продолжение) Следствие из аксиомы присоединения – Кинематическое состояние тела
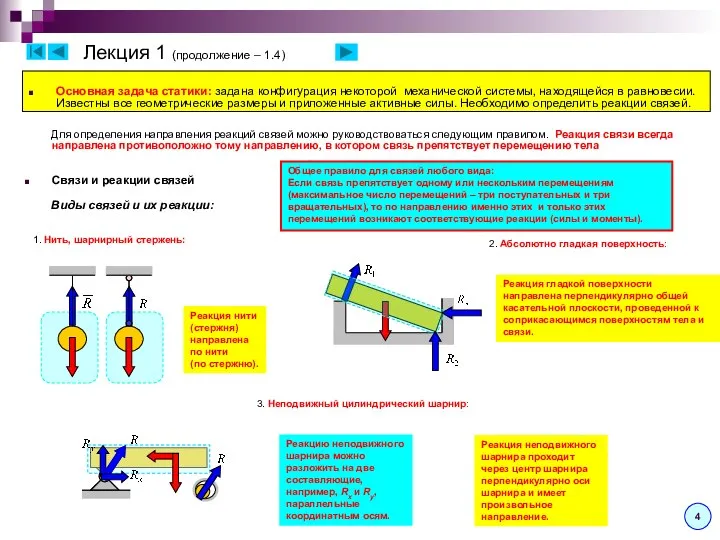
- 6. Основная задача статики: задана конфигурация некоторой механической системы, находящейся в равновесии. Известны все геометрические размеры и
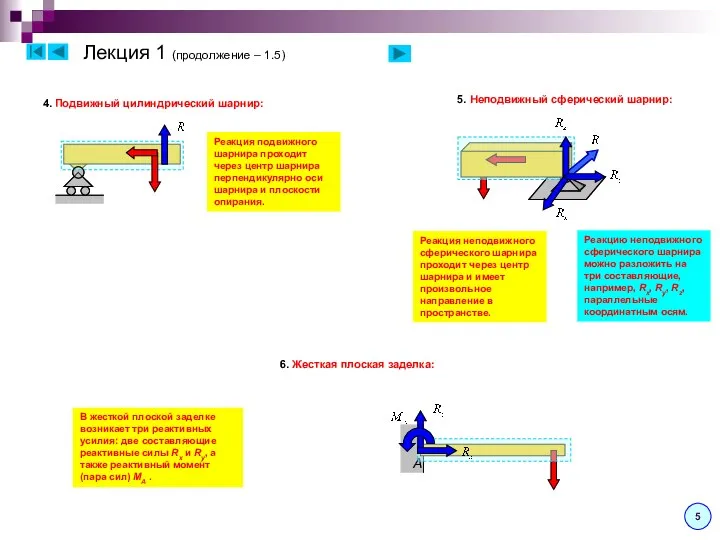
- 7. Лекция 1 (продолжение – 1.5) 4. Подвижный цилиндрический шарнир: Реакция подвижного шарнира проходит через центр шарнира
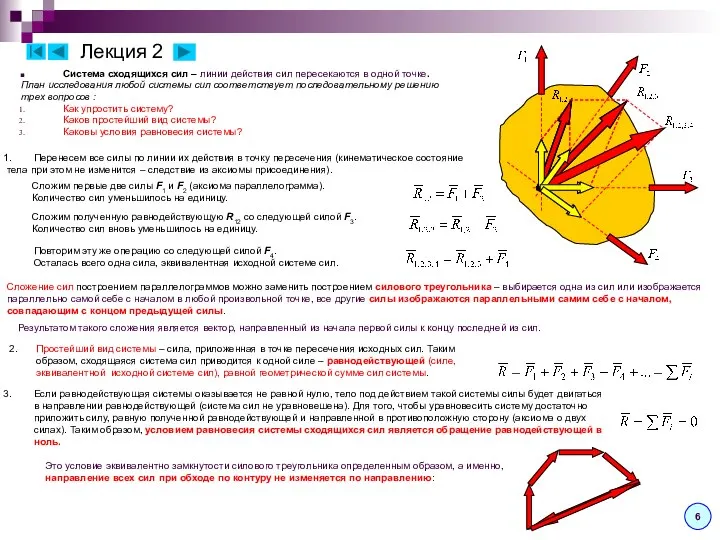
- 8. Система сходящихся сил – линии действия сил пересекаются в одной точке. План исследования любой системы сил
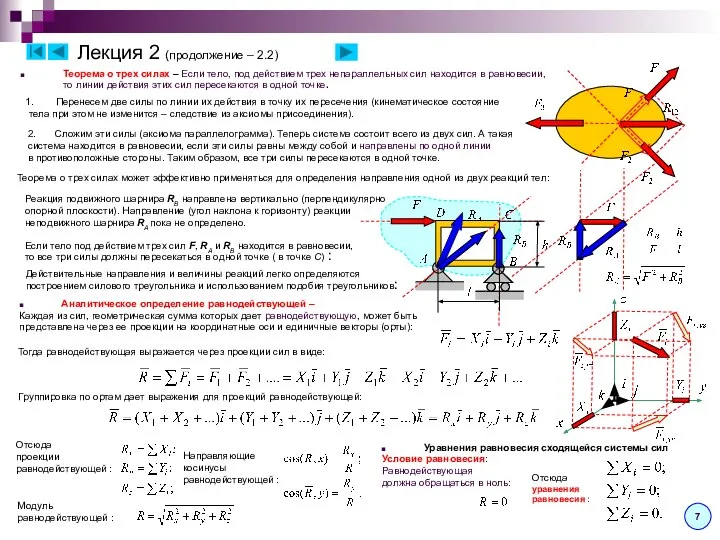
- 9. Теорема о трех силах – Если тело, под действием трех непараллельных сил находится в равновесии, то
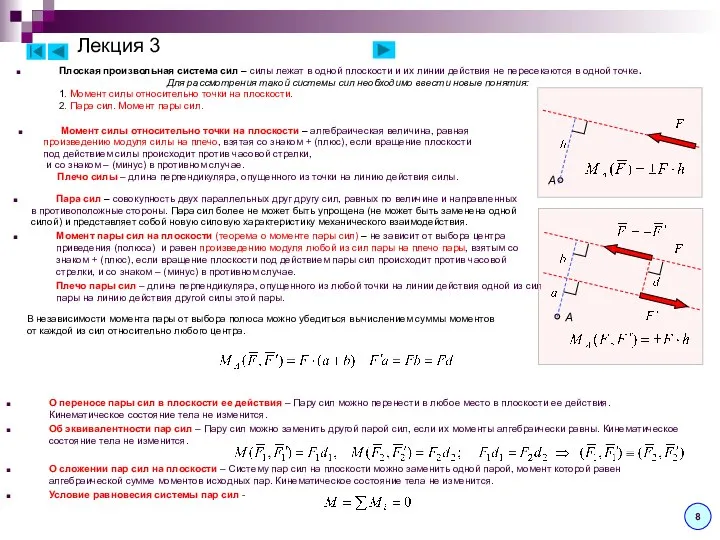
- 10. Плоская произвольная система сил – силы лежат в одной плоскости и их линии действия не пересекаются
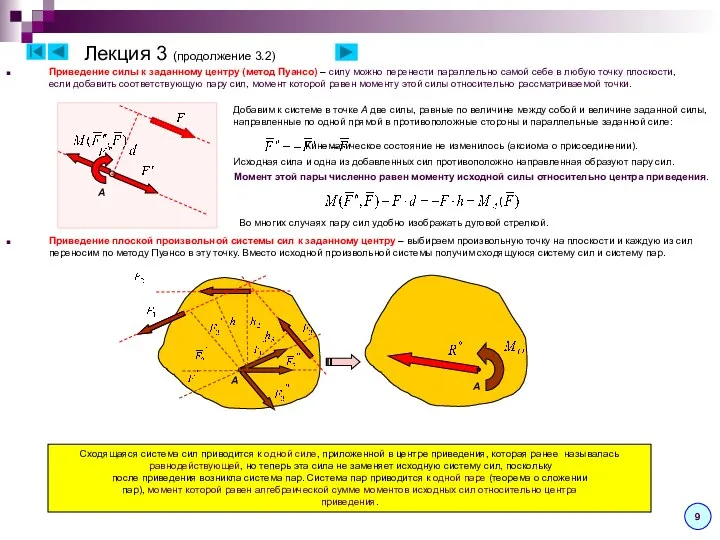
- 11. Лекция 3 (продолжение 3.2) Приведение силы к заданному центру (метод Пуансо) – силу можно перенести параллельно
- 12. Лекция 3 (продолжение 3.3) Условием равновесия плоской произвольной системы сил является одновременное обращение главного вектора и
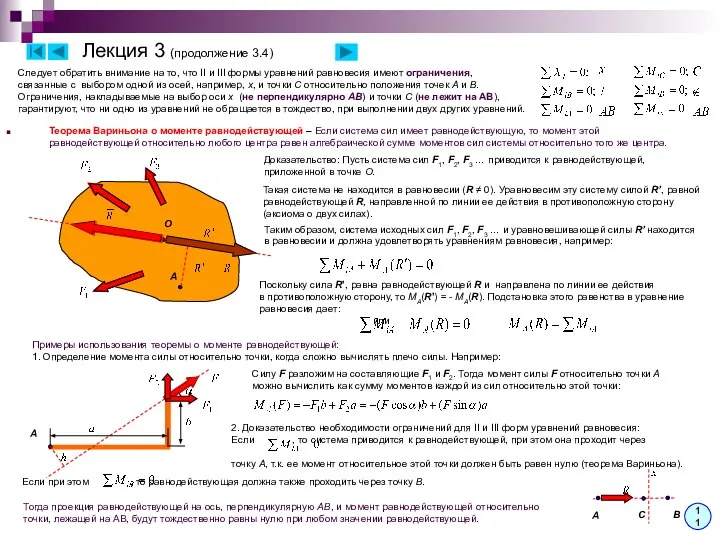
- 13. Лекция 3 (продолжение 3.4) Следует обратить внимание на то, что II и III формы уравнений равновесия
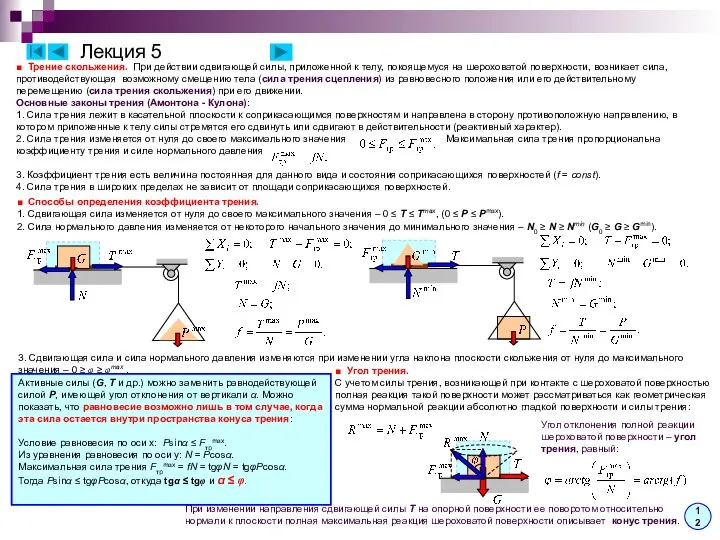
- 14. Лекция 5 ■ Трение скольжения. При действии сдвигающей силы, приложенной к телу, покоящемуся на шероховатой поверхности,
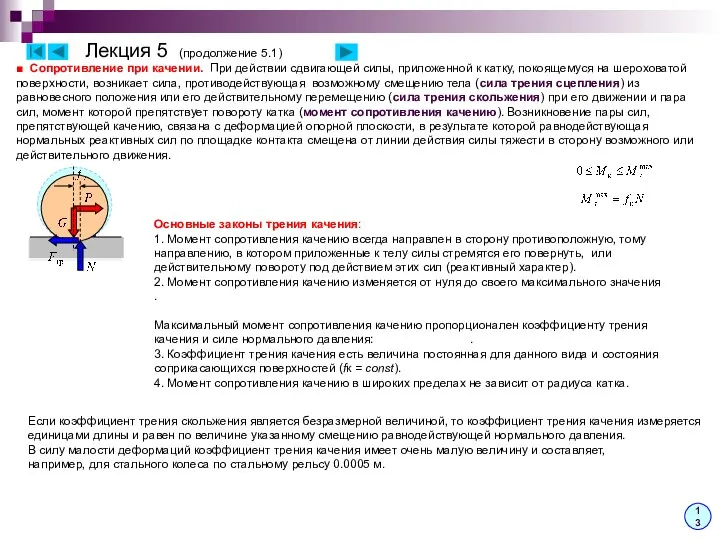
- 15. Лекция 5 (продолжение 5.1) ■ Сопротивление при качении. При действии сдвигающей силы, приложенной к катку, покоящемуся
- 17. Скачать презентацию
Слайд 2 Содержание
Лекция 1. Введение. Основные понятия. Аксиомы статики. Связи и реакции связей.
Лекция
Содержание
Лекция 1. Введение. Основные понятия. Аксиомы статики. Связи и реакции связей.
Лекция
Слайд 3Лекция 1
Введение
Под названием “механика” объединяется ряд наук, изучающих механическое движение и
Лекция 1
Введение
Под названием “механика” объединяется ряд наук, изучающих механическое движение и
Слайд 4Лекция 1 (продолжение – 1.2)
Теоретическая механика состоит из трех разделов:
Статика – изучает
Лекция 1 (продолжение – 1.2)
Теоретическая механика состоит из трех разделов:
Статика – изучает
Слайд 5Лекция 1 (продолжение – 1.3)
Аксиомы статики (продолжение)
Следствие из аксиомы присоединения – Кинематическое
Лекция 1 (продолжение – 1.3)
Аксиомы статики (продолжение)
Следствие из аксиомы присоединения – Кинематическое
Слайд 6Основная задача статики: задана конфигурация некоторой механической системы, находящейся в равновесии. Известны
Слайд 7Лекция 1 (продолжение – 1.5)
4. Подвижный цилиндрический шарнир:
Реакция подвижного
шарнира проходит через центр
Лекция 1 (продолжение – 1.5)
4. Подвижный цилиндрический шарнир:
Реакция подвижного
шарнира проходит через центр
Слайд 8Система сходящихся сил – линии действия сил пересекаются в одной точке.
План
План
Слайд 9Теорема о трех силах – Если тело, под действием трех непараллельных сил
Слайд 10Плоская произвольная система сил – силы лежат в одной плоскости и их
Плоская произвольная система сил – силы лежат в одной плоскости и их
Слайд 11Лекция 3 (продолжение 3.2)
Приведение силы к заданному центру (метод Пуансо) –
Лекция 3 (продолжение 3.2)
Приведение силы к заданному центру (метод Пуансо) –
Слайд 12Лекция 3 (продолжение 3.3)
Условием равновесия плоской произвольной системы сил является одновременное
Лекция 3 (продолжение 3.3)
Условием равновесия плоской произвольной системы сил является одновременное
Слайд 13Лекция 3 (продолжение 3.4)
Следует обратить внимание на то, что II и III
Лекция 3 (продолжение 3.4)
Следует обратить внимание на то, что II и III
Слайд 14Лекция 5
■ Трение скольжения. При действии сдвигающей силы, приложенной к телу,
Лекция 5
■ Трение скольжения. При действии сдвигающей силы, приложенной к телу,
Слайд 15Лекция 5 (продолжение 5.1)
■ Сопротивление при качении. При действии сдвигающей силы, приложенной
Лекция 5 (продолжение 5.1)
■ Сопротивление при качении. При действии сдвигающей силы, приложенной
 Оптимизация корпусов ГТД по массе с обеспечением требований удержания оборвавшейся лопатки
Оптимизация корпусов ГТД по массе с обеспечением требований удержания оборвавшейся лопатки Космология Ньютона. Часть 2. Физика космоса
Космология Ньютона. Часть 2. Физика космоса Элементарные частицы
Элементарные частицы Cилы в механики. 9 класс
Cилы в механики. 9 класс Основы массопередачи. Массообменные процессы
Основы массопередачи. Массообменные процессы 5_urok_grafiki_sokrosti (1)
5_urok_grafiki_sokrosti (1)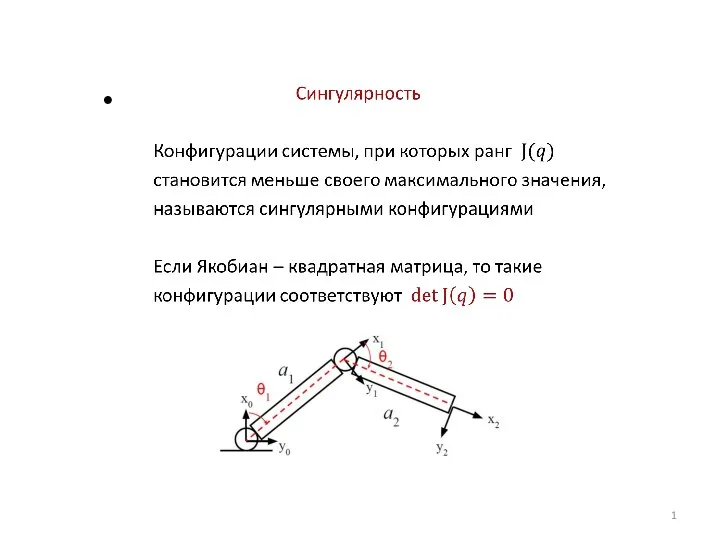 Сингулярность. Сингулярные конфигурации
Сингулярность. Сингулярные конфигурации Анализ вариаций ОНЧ-излучения во время геомагнитной активности с 1979 по 2018 гг., по наблюдениям на радиофизическом полигоне
Анализ вариаций ОНЧ-излучения во время геомагнитной активности с 1979 по 2018 гг., по наблюдениям на радиофизическом полигоне Графические материалы к лекции 12.09.22
Графические материалы к лекции 12.09.22 Лазеры
Лазеры Изменение агрегатных состояний вещества
Изменение агрегатных состояний вещества Телескоп из одной линзы
Телескоп из одной линзы Что за знаки перед нами?
Что за знаки перед нами? Механическое движение. Повторение
Механическое движение. Повторение Механическая передача
Механическая передача ТО и ТР коробок передач
ТО и ТР коробок передач Гигрометр. Виды гигрометров
Гигрометр. Виды гигрометров Газовые законы
Газовые законы Строение твердых тел, жидкостей и газов
Строение твердых тел, жидкостей и газов Постоянные магниты. Магнитное поле
Постоянные магниты. Магнитное поле Измерительный прибор для определения влажности воздуха - гигрометр
Измерительный прибор для определения влажности воздуха - гигрометр Презентация на тему Электромагнитные колебания решение задач
Презентация на тему Электромагнитные колебания решение задач  Устройство и принцип работы дизельного двигателя
Устройство и принцип работы дизельного двигателя Закон Джоуля-Ленца
Закон Джоуля-Ленца Теория механизмов и машин. Лекция 6
Теория механизмов и машин. Лекция 6 Дифракция. Дифракционная решетка
Дифракция. Дифракционная решетка Теплопроводность
Теплопроводность Инфракрасное излучение в помощь школе
Инфракрасное излучение в помощь школе