- Средства автоматизации измерения, контроля и управления. Лекция 8

Содержание
- 2. 3.1. Датчики измерительных систем «Автоматизированные системы измерения, контроля и управления РЭС» 3. Средства автоматизации измерения, контроля
- 3. Распределенные датчики 3.1.1. Перспективные направления в области сенсорики Устройство и принцип работы «Автоматизированные системы измерения, контроля
- 4. Квазираспределенная система измерения температуры на основе кварцевых резонаторов 3.1.1. Перспективные направления в области сенсорики «Автоматизированные системы
- 5. 3.1.1. Перспективные направления в области сенсорики Measurement system of water, oil and gas content in a
- 6. 3.1.1. Перспективные направления в области сенсорики Borehole unit Printed circuit boards of the borehole unit Measurement
- 7. 3.1.1. Перспективные направления в области сенсорики Техническое зрение Метод соприкасающихся частей Разработка алгоритма обработки изображений NI
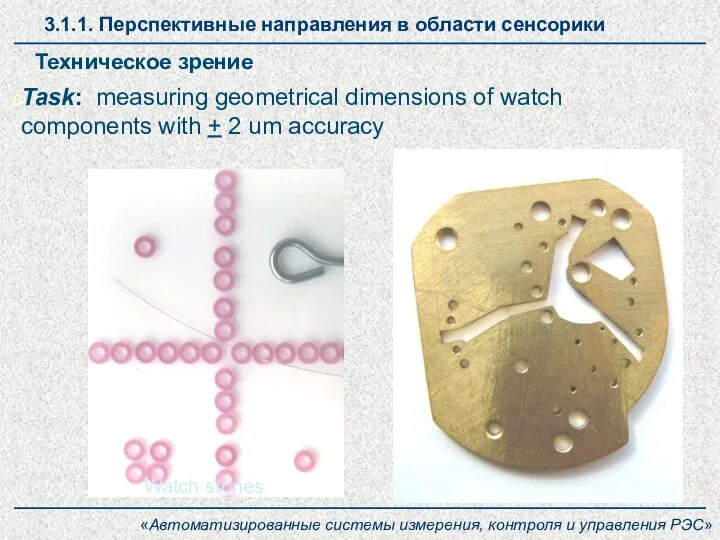
- 8. 3.1.1. Перспективные направления в области сенсорики Task: measuring geometrical dimensions of watch components with + 2
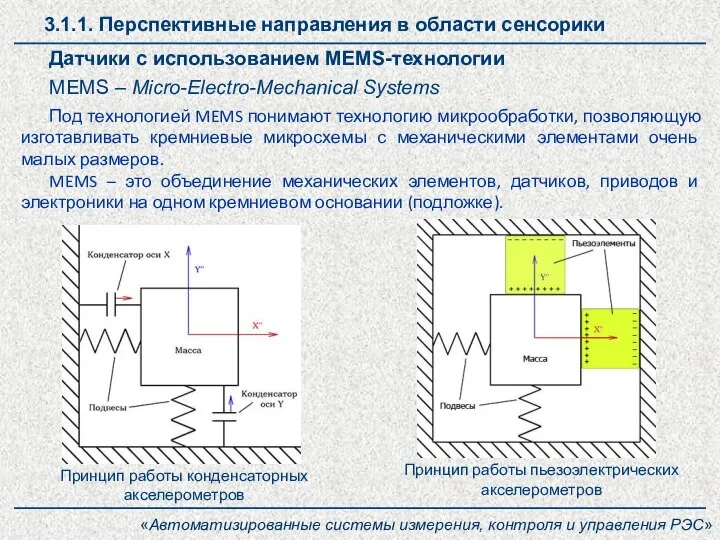
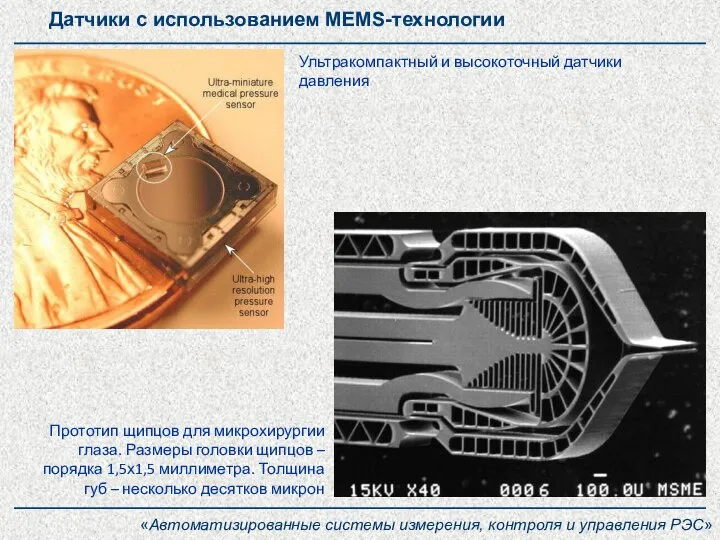
- 9. Датчики с использованием MEMS-технологии 3.1.1. Перспективные направления в области сенсорики MEMS – Micro-Electro-Mechanical Systems Под технологией
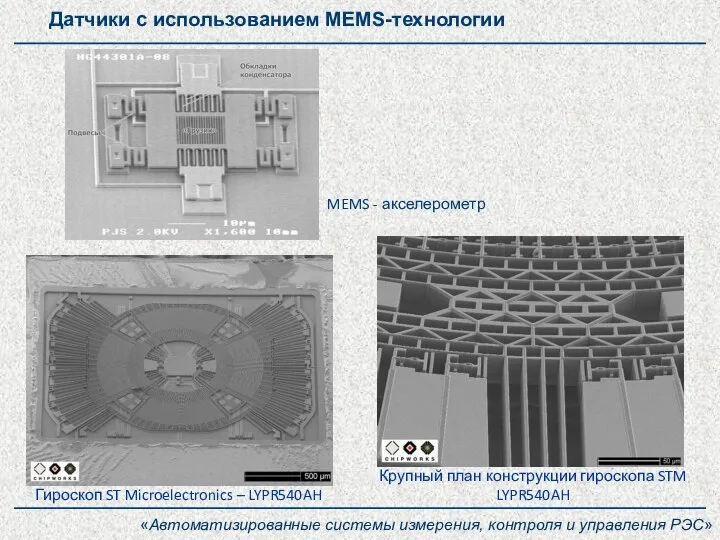
- 10. Датчики с использованием MEMS-технологии «Автоматизированные системы измерения, контроля и управления РЭС» Гироскоп ST Microelectronics – LYPR540AH
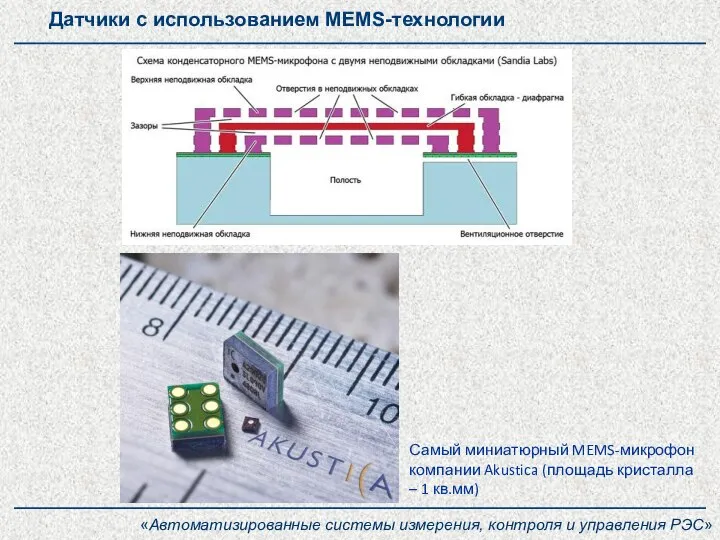
- 11. «Автоматизированные системы измерения, контроля и управления РЭС» Датчики с использованием MEMS-технологии Самый миниатюрный MEMS-микрофон компании Akustica
- 12. «Автоматизированные системы измерения, контроля и управления РЭС» Датчики с использованием MEMS-технологии Прототип щипцов для микрохирургии глаза.
- 13. «Автоматизированные системы измерения, контроля и управления РЭС» Датчики с использованием MEMS-технологии DLP-проектор (DLP – Digital Light
- 14. «Автоматизированные системы измерения, контроля и управления РЭС» Датчики с использованием MEMS-технологии Пример изготовления микротурбин/микронасосов Микрозеркало с
- 15. Использованные источники: 3.1.1. Перспективные направления в области сенсорики 1. Саленко Д.С. История развития и области применения
- 16. 3.1.2. Классификация датчиков 1. По способу формирования выходного сигнала: 1) пассивные; 2) активные. Активные датчики не
- 17. 3.1.2. Классификация датчиков 3. По виду преобразуемых величин: 1. Датчики механических величин. Служат для преобразования линейных
- 18. Применяемые в настоящее время датчики служат, в основном, для восприятия следующих физических и физико-химических полей: 1.
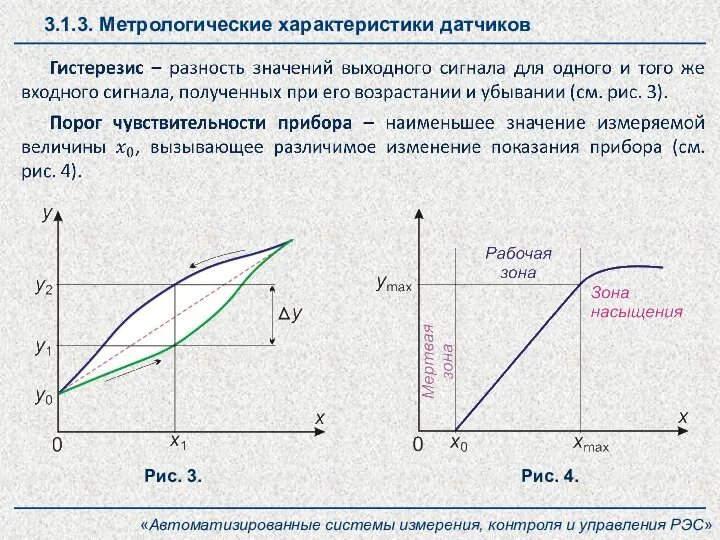
- 19. 3.1.3. Метрологические характеристики датчиков «Автоматизированные системы измерения, контроля и управления РЭС» На практике наиболее часто распространены
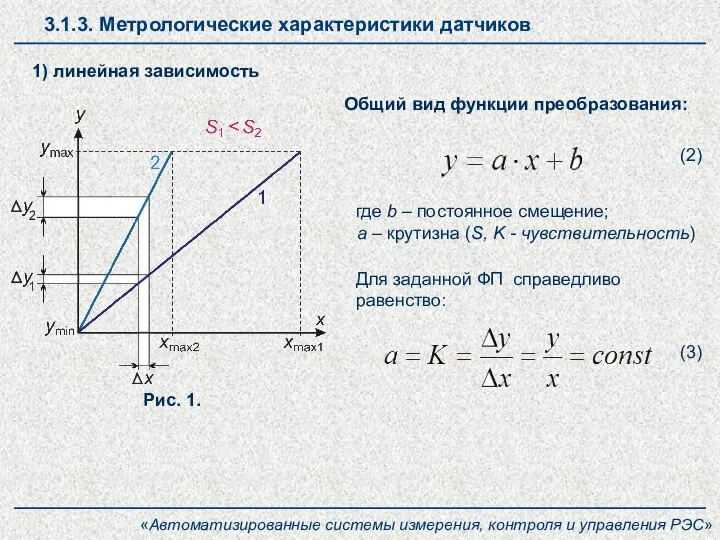
- 20. 3.1.3. Метрологические характеристики датчиков «Автоматизированные системы измерения, контроля и управления РЭС» 1) линейная зависимость Общий вид
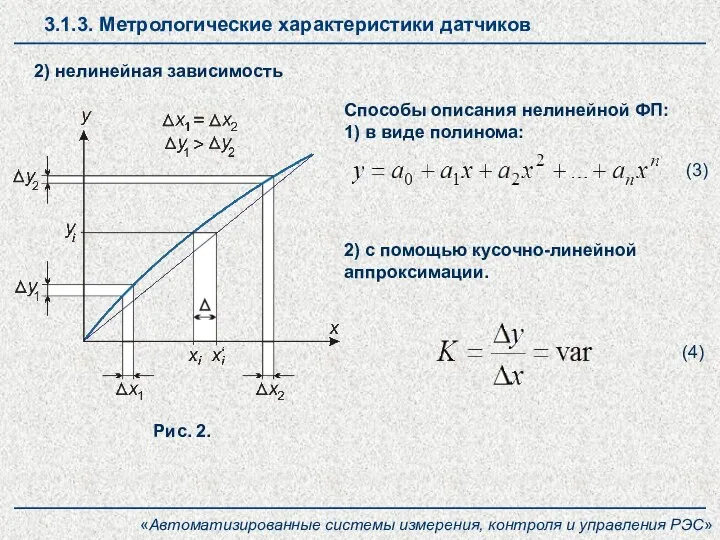
- 21. 3.1.3. Метрологические характеристики датчиков «Автоматизированные системы измерения, контроля и управления РЭС» 2) нелинейная зависимость Рис. 2.
- 22. 3.1.3. Метрологические характеристики датчиков «Автоматизированные системы измерения, контроля и управления РЭС» Рис. 3. Рис. 4.
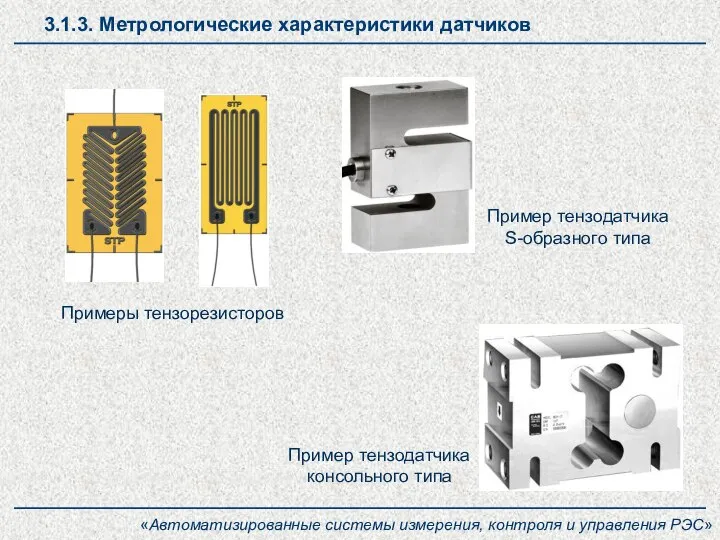
- 23. 3.1.3. Метрологические характеристики датчиков «Автоматизированные системы измерения, контроля и управления РЭС» Примеры тензорезисторов Пример тензодатчика S-образного
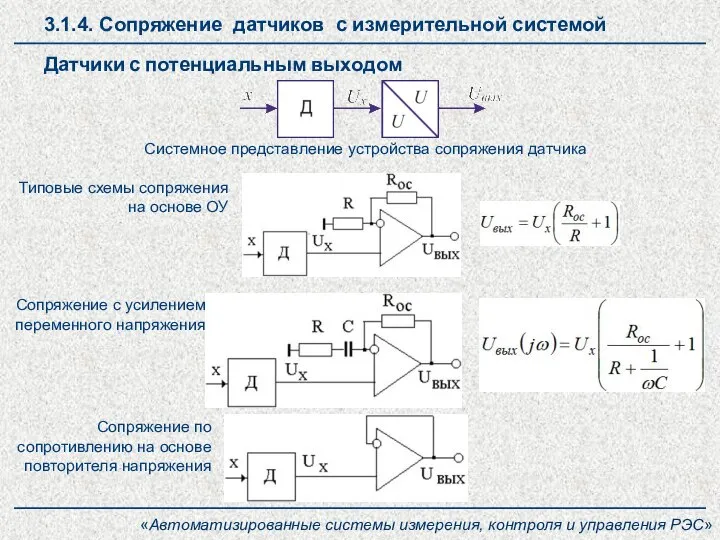
- 24. Датчики с потенциальным выходом 3.1.4. Сопряжение датчиков с измерительной системой Системное представление устройства сопряжения датчика «Автоматизированные
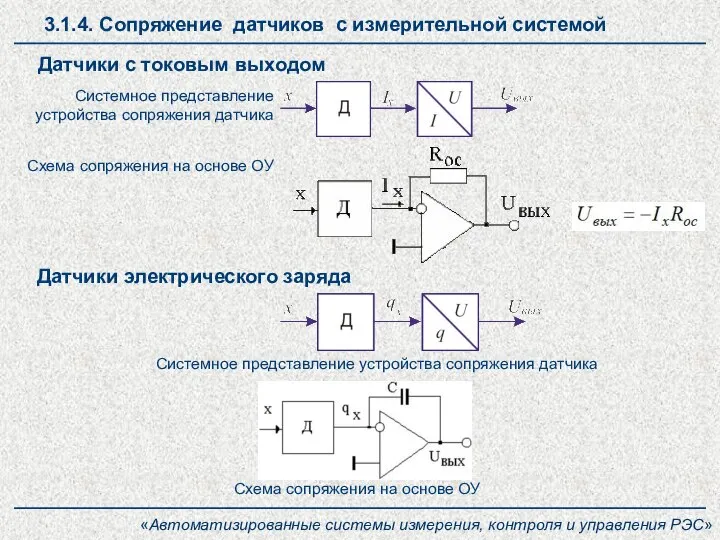
- 25. Датчики с токовым выходом 3.1.4. Сопряжение датчиков с измерительной системой Системное представление устройства сопряжения датчика Схема
- 26. 3.1.4. Сопряжение датчиков с измерительной системой Резистивные датчики Системное представление устройства сопряжения датчика Схема включения резистивного
- 27. «Автоматизированные системы измерения, контроля и управления РЭС» Включение датчика с импедансным выходом 3.1.4. Сопряжение датчиков с
- 28. Темы для самостоятельного изучения Унифицирующие измерительные преобразователи Аналоговые коммутаторы АЦП ЦАП «Автоматизированные системы измерения, контроля и
- 30. Скачать презентацию
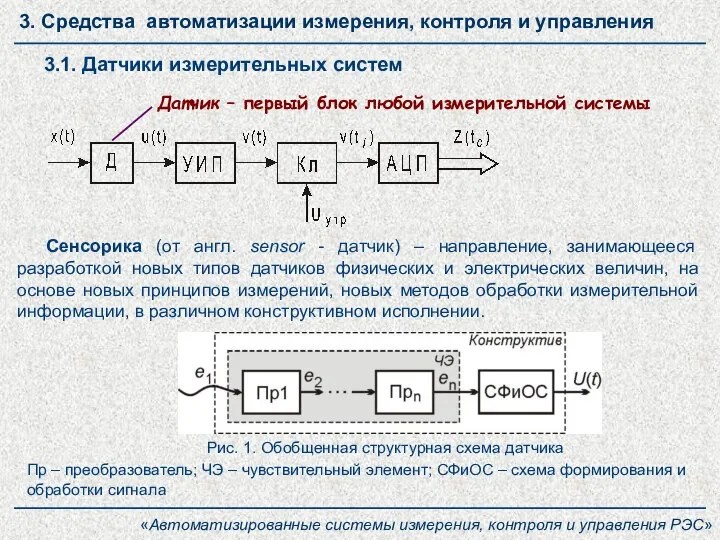
Слайд 23.1. Датчики измерительных систем
«Автоматизированные системы измерения, контроля и управления РЭС»
3. Средства
3.1. Датчики измерительных систем
«Автоматизированные системы измерения, контроля и управления РЭС»
3. Средства
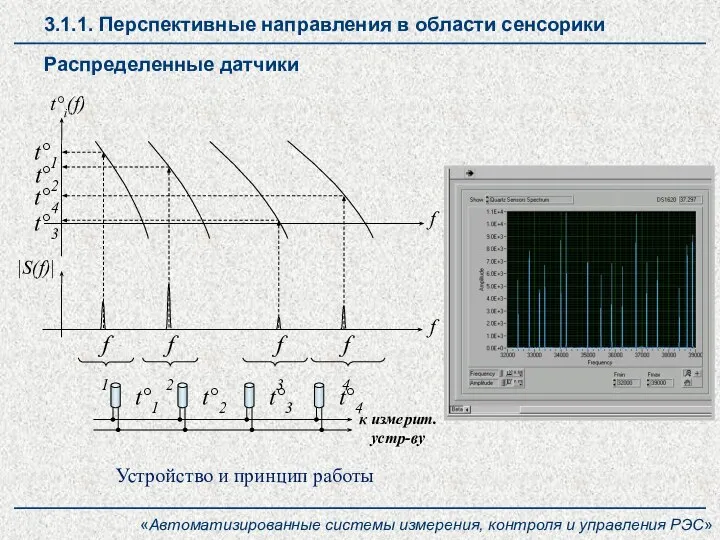
Слайд 3Распределенные датчики
3.1.1. Перспективные направления в области сенсорики
Устройство и принцип работы
«Автоматизированные системы измерения,
Распределенные датчики
3.1.1. Перспективные направления в области сенсорики
Устройство и принцип работы
«Автоматизированные системы измерения,
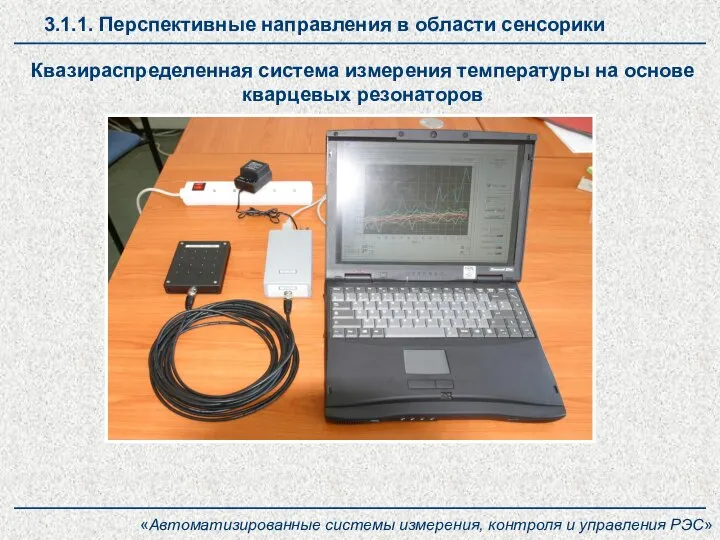
Слайд 4Квазираспределенная система измерения температуры на основе кварцевых резонаторов
3.1.1. Перспективные направления в области
Квазираспределенная система измерения температуры на основе кварцевых резонаторов
3.1.1. Перспективные направления в области
Слайд 53.1.1. Перспективные направления в области сенсорики
Measurement system of water, oil and gas
3.1.1. Перспективные направления в области сенсорики
Measurement system of water, oil and gas

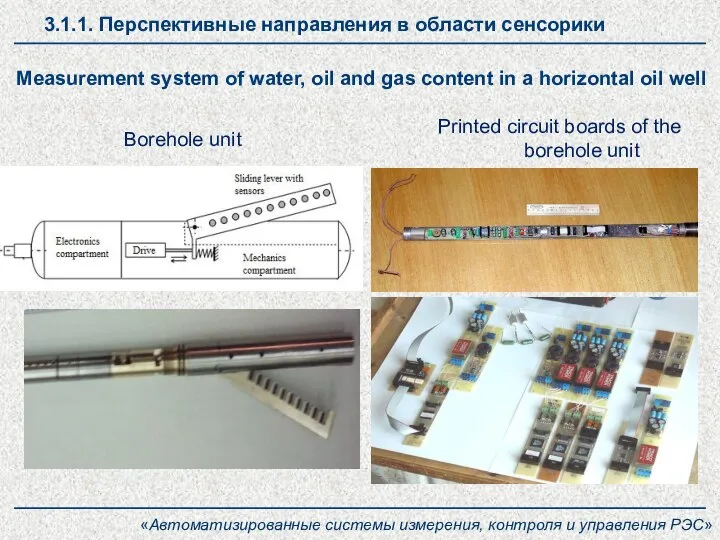
Слайд 63.1.1. Перспективные направления в области сенсорики
Borehole unit
Printed circuit boards of the
3.1.1. Перспективные направления в области сенсорики
Borehole unit
Printed circuit boards of the
Слайд 73.1.1. Перспективные направления в области сенсорики
Техническое зрение
Метод соприкасающихся частей
Разработка алгоритма обработки изображений
NI
3.1.1. Перспективные направления в области сенсорики
Техническое зрение
Метод соприкасающихся частей
Разработка алгоритма обработки изображений
NI

Слайд 83.1.1. Перспективные направления в области сенсорики
Task: measuring geometrical dimensions of watch components
3.1.1. Перспективные направления в области сенсорики
Task: measuring geometrical dimensions of watch components
Слайд 9Датчики с использованием MEMS-технологии
3.1.1. Перспективные направления в области сенсорики
MEMS – Micro-Electro-Mechanical Systems
Под
Датчики с использованием MEMS-технологии
3.1.1. Перспективные направления в области сенсорики
MEMS – Micro-Electro-Mechanical Systems
Под
Слайд 10Датчики с использованием MEMS-технологии
«Автоматизированные системы измерения, контроля и управления РЭС»
Гироскоп ST
Датчики с использованием MEMS-технологии
«Автоматизированные системы измерения, контроля и управления РЭС»
Гироскоп ST
Слайд 11«Автоматизированные системы измерения, контроля и управления РЭС»
Датчики с использованием MEMS-технологии
Самый миниатюрный
«Автоматизированные системы измерения, контроля и управления РЭС»
Датчики с использованием MEMS-технологии
Самый миниатюрный
Слайд 12«Автоматизированные системы измерения, контроля и управления РЭС»
Датчики с использованием MEMS-технологии
Прототип щипцов
«Автоматизированные системы измерения, контроля и управления РЭС»
Датчики с использованием MEMS-технологии
Прототип щипцов
Слайд 13«Автоматизированные системы измерения, контроля и управления РЭС»
Датчики с использованием MEMS-технологии
DLP-проектор (DLP
«Автоматизированные системы измерения, контроля и управления РЭС»
Датчики с использованием MEMS-технологии
DLP-проектор (DLP

Слайд 14«Автоматизированные системы измерения, контроля и управления РЭС»
Датчики с использованием MEMS-технологии
Пример изготовления
«Автоматизированные системы измерения, контроля и управления РЭС»
Датчики с использованием MEMS-технологии
Пример изготовления

Слайд 15Использованные источники:
3.1.1. Перспективные направления в области сенсорики
1. Саленко Д.С. История развития и
Использованные источники:
3.1.1. Перспективные направления в области сенсорики
1. Саленко Д.С. История развития и
Слайд 163.1.2. Классификация датчиков
1. По способу формирования выходного сигнала:
1) пассивные;
2) активные.
Активные датчики не
3.1.2. Классификация датчиков
1. По способу формирования выходного сигнала:
1) пассивные;
2) активные.
Активные датчики не
Слайд 173.1.2. Классификация датчиков
3. По виду преобразуемых величин:
1. Датчики механических величин. Служат для
3.1.2. Классификация датчиков
3. По виду преобразуемых величин:
1. Датчики механических величин. Служат для
Слайд 18Применяемые в настоящее время датчики служат, в основном, для восприятия следующих физических
Применяемые в настоящее время датчики служат, в основном, для восприятия следующих физических
Слайд 193.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
На практике
3.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
На практике
Слайд 203.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
1) линейная
3.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
1) линейная
Слайд 213.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
2) нелинейная
3.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
2) нелинейная
Слайд 223.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
Рис. 3.
Рис.
3.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
Рис. 3.
Рис.
Слайд 233.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
Примеры тензорезисторов
Пример
3.1.3. Метрологические характеристики датчиков
«Автоматизированные системы измерения, контроля и управления РЭС»
Примеры тензорезисторов
Пример
Слайд 24Датчики с потенциальным выходом
3.1.4. Сопряжение датчиков с измерительной системой
Системное представление устройства сопряжения
Датчики с потенциальным выходом
3.1.4. Сопряжение датчиков с измерительной системой
Системное представление устройства сопряжения
Слайд 25Датчики с токовым выходом
3.1.4. Сопряжение датчиков с измерительной системой
Системное представление
устройства сопряжения датчика
Схема
Датчики с токовым выходом
3.1.4. Сопряжение датчиков с измерительной системой
Системное представление
устройства сопряжения датчика
Схема
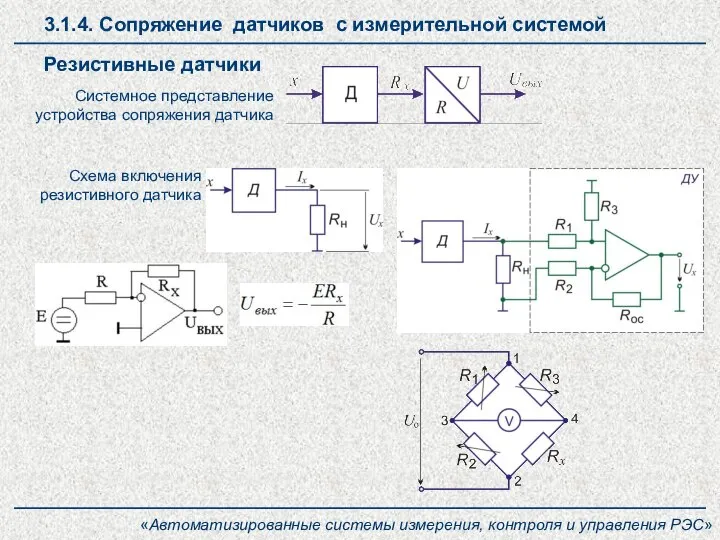
Слайд 263.1.4. Сопряжение датчиков с измерительной системой
Резистивные датчики
Системное представление
устройства сопряжения датчика
Схема включения резистивного
3.1.4. Сопряжение датчиков с измерительной системой
Резистивные датчики
Системное представление
устройства сопряжения датчика
Схема включения резистивного
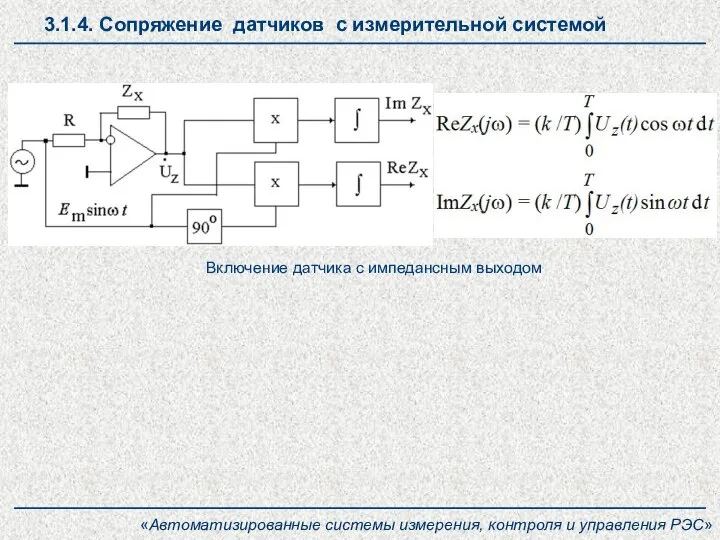
Слайд 27«Автоматизированные системы измерения, контроля и управления РЭС»
Включение датчика с импедансным выходом
3.1.4.
«Автоматизированные системы измерения, контроля и управления РЭС»
Включение датчика с импедансным выходом
3.1.4.
Слайд 28Темы для самостоятельного изучения
Унифицирующие измерительные преобразователи
Аналоговые коммутаторы
АЦП
ЦАП
«Автоматизированные системы измерения, контроля и управления
Темы для самостоятельного изучения
Унифицирующие измерительные преобразователи
Аналоговые коммутаторы
АЦП
ЦАП
«Автоматизированные системы измерения, контроля и управления
 Презентация на тему Давление жидкости
Презентация на тему Давление жидкости  Изменение внутренней энергии. Теплопередача
Изменение внутренней энергии. Теплопередача Молекулярно-кинетическая теория идеальных газов
Молекулярно-кинетическая теория идеальных газов Международная система единиц. Скалярные и векторные физические величины. 7 класс
Международная система единиц. Скалярные и векторные физические величины. 7 класс Физика - фундаментальная наука
Физика - фундаментальная наука Линзы. Оптика
Линзы. Оптика Закон Ома. Сопротивление проводника. Решение задач
Закон Ома. Сопротивление проводника. Решение задач Логарифмы в физике
Логарифмы в физике Интерференция, дифракция, поляризация
Интерференция, дифракция, поляризация Строение атома. Опыты Резерфорда
Строение атома. Опыты Резерфорда рем. техн. обор-ия
рем. техн. обор-ия Измерение количества и расхода жидкости и газа в практике горно-буровых работ
Измерение количества и расхода жидкости и газа в практике горно-буровых работ Применение спектрального анализа в криминалистике
Применение спектрального анализа в криминалистике Прогнозирование изменения прочностных свойств резины при ее термическом старении
Прогнозирование изменения прочностных свойств резины при ее термическом старении Сравнение количеств теплоты при смешивании воды разной температуры. Лабораторная работа № 1
Сравнение количеств теплоты при смешивании воды разной температуры. Лабораторная работа № 1 Приемы выполнения фальцевого и заклепочного швов и соединения деталей
Приемы выполнения фальцевого и заклепочного швов и соединения деталей Сертификация шноркеля на базе легкового автомобиля категории М1
Сертификация шноркеля на базе легкового автомобиля категории М1 Сила трения
Сила трения Излучение и поглощение электромагнитных волн в среде. (Лекция 2)
Излучение и поглощение электромагнитных волн в среде. (Лекция 2) Презентация на тему Электрический ток в различных средах
Презентация на тему Электрический ток в различных средах  Электроавиация. Разработка электрической винтомоторной группы для лёгкого летательного аппарата
Электроавиация. Разработка электрической винтомоторной группы для лёгкого летательного аппарата Броуновское движение. Диффузия. Силы взаимодействия молекул
Броуновское движение. Диффузия. Силы взаимодействия молекул Задачи по физике
Задачи по физике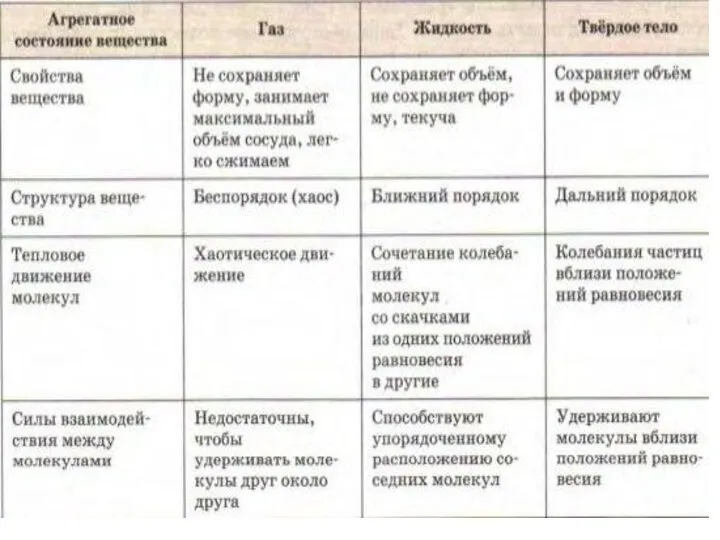 Свойства жидкостей
Свойства жидкостей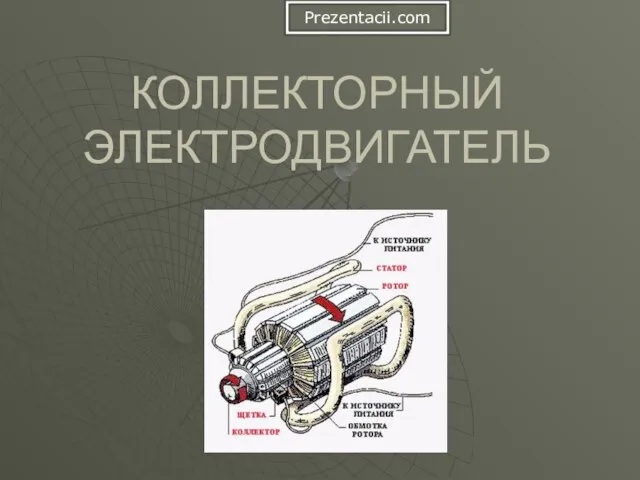 Презентация на тему Коллекторный электродвигатель
Презентация на тему Коллекторный электродвигатель  Оптимальна обробка радіотеплових сигналів
Оптимальна обробка радіотеплових сигналів Равновесие жидкости и газа
Равновесие жидкости и газа Законы постоянного тока
Законы постоянного тока