- Lect_4

Содержание
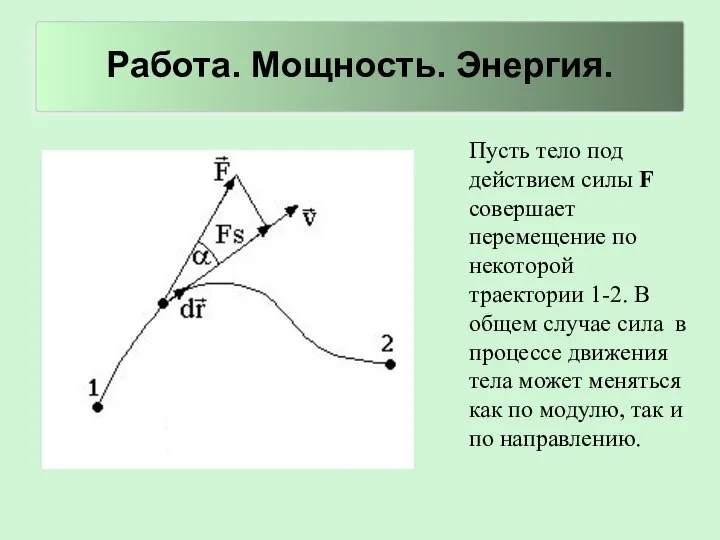
- 2. Работа. Мощность. Энергия. Пусть тело под действием силы F совершает перемещение по некоторой траектории 1-2. В
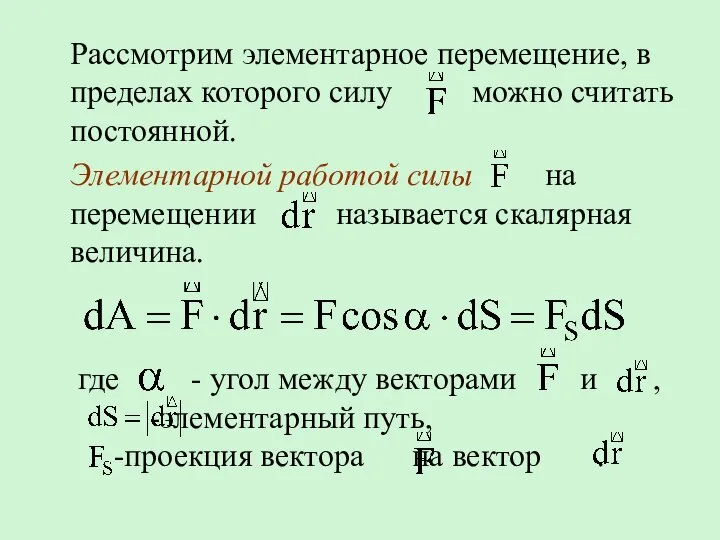
- 3. Рассмотрим элементарное перемещение, в пределах которого силу можно считать постоянной. Элементарной работой силы на перемещении называется
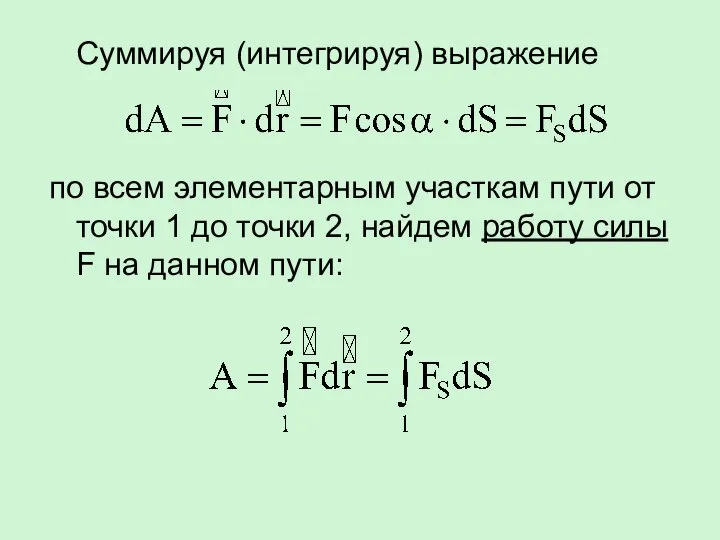
- 4. Суммируя (интегрируя) выражение по всем элементарным участкам пути от точки 1 до точки 2, найдем работу
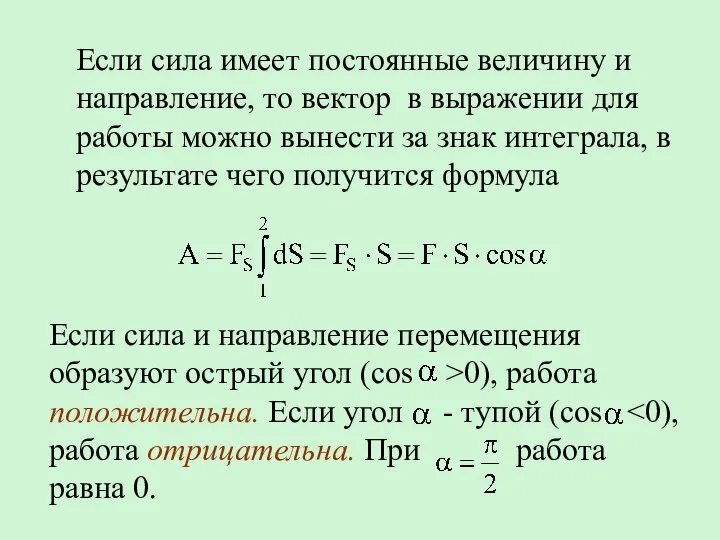
- 5. Если сила имеет постоянные величину и направление, то вектор в выражении для работы можно вынести за
- 6. Единица работы – джоуль (Дж). 1 Дж – работа, совершаемая силой 1 Н на пути 1м
- 7. Для характеристики скорости, с которой совершается работа, вводят величину, называемую мощностью. Мощность – это работа, совершаемая
- 8. Учитывая, что , получим Таким образом, мощность, развиваемая силой , равна скалярному произведению вектора силы на
- 9. Мощность – скалярная величина. Единица мощности – ватт (Вт): 1 Вт – мощность при которой за
- 10. Существуют различные формы движения материи – механическая, тепловая, электромагнитная, ядерная и др. В одних явлениях форма
- 11. В механике различают два вида энергии – кинетическую и потенциальную. Кинетическая энергия – это механическая энергия
- 12. Таким образом, То есть работа силы идет на приращение некоторой величины (стоящей в скобках). Эту величину
- 13. При конечном перемещении из точки 1 в точку 2 работа силы идет на приращение кинетической энергии:
- 14. Потенциальная энергия – это механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия
- 15. Пусть взаимодействие между телами осуществляется с помощью силовых полей (например, поле гравитационных сил, поле упругих сил),
- 16. Тело, находящееся в поле консервативных сил, обладает потенциальной энергией EП. Работа консервативной силы определяется разностью потенциальной
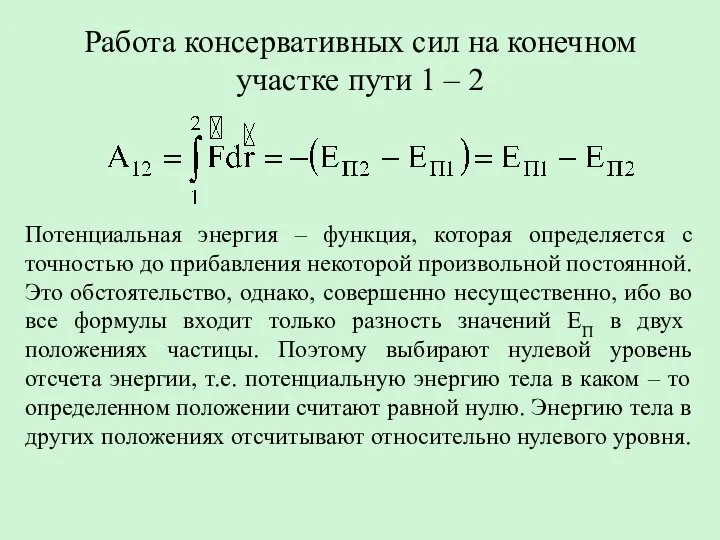
- 17. Работа консервативных сил на конечном участке пути 1 – 2 Потенциальная энергия – функция, которая определяется
- 18. Конкретный вид функции EП зависит от характера силового поля. Например, потенциальная энергия тела массы m, поднятого
- 19. Потенциальной энергией может обладать не только система тел, но и отдельно взятое упруго деформированное тело –
- 20. При возвращении пружины из деформированного в недеформированное состояние сила упругости совершает работу Если потенциальную энергию пружины
- 21. Полная механическая энергия системы E=EK + EП , т.е. равна сумме кинетической и потенциальной энергий
- 22. Связь между потенциальной энергией и силой. Потенциальная энергия тела зависит от его координат: EП = EП
- 23. Рассмотрим перемещение тела под действием силы F. Разложим силу на три составляющие вдоль координатных осей и
- 24. Эту работу можно представить как убыль потенциальной энергии: Из сравнения последних выражений имеем: Отсюда Здесь -
- 25. Такие производные называются частными и обозначаются символом Итак, Эти три формулы можно объединить в одну векторную
- 26. Или Выражение, стоящее в скобках, называют градиентом функции и обозначают Сила равна градиенту потенциальной энергии, взятому
- 27. Потенциальные кривые. Условия равновесия механической системы. Рассмотрим материальную точку, положение которой может быть определено с помощью
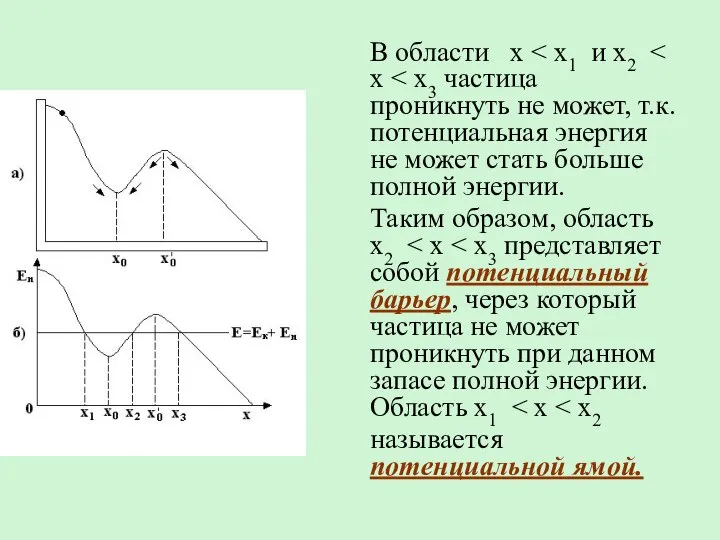
- 28. В качестве примера рассмотрим шарик, скользящий без трения по изогнутой в вертикальной плоскости проволоке. На шарик
- 29. Полная энергия шарика E изображена на графике горизонтальной линией, поскольку имеет место закон сохранения энергии E=Eк+Eп.
- 30. В области x Таким образом, область x2 называется потенциальной ямой.
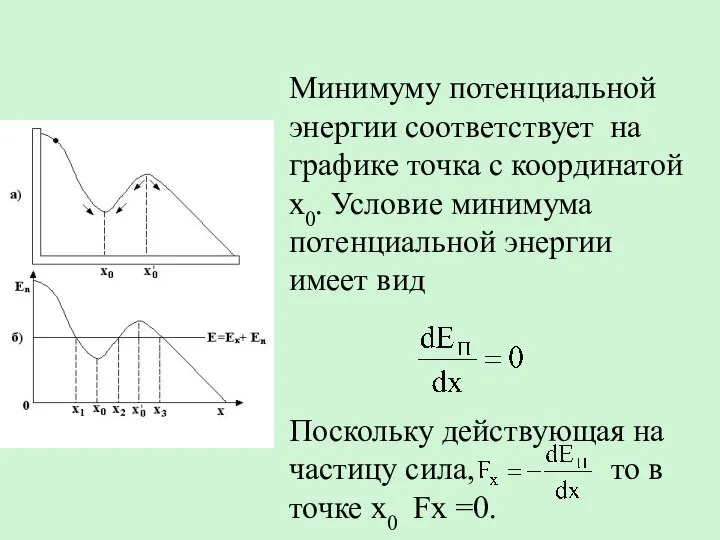
- 31. Минимуму потенциальной энергии соответствует на графике точка с координатой x0. Условие минимума потенциальной энергии имеет вид
- 33. Скачать презентацию
Слайд 2
Работа. Мощность. Энергия.
Пусть тело под действием силы F совершает перемещение по некоторой
Работа. Мощность. Энергия.
Пусть тело под действием силы F совершает перемещение по некоторой
Слайд 3 Рассмотрим элементарное перемещение, в пределах которого силу можно считать постоянной.
Элементарной работой силы
Рассмотрим элементарное перемещение, в пределах которого силу можно считать постоянной.
Элементарной работой силы
Слайд 4 Суммируя (интегрируя) выражение
по всем элементарным участкам пути от точки 1 до
Суммируя (интегрируя) выражение
по всем элементарным участкам пути от точки 1 до
Слайд 5 Если сила имеет постоянные величину и направление, то вектор в выражении для
Если сила имеет постоянные величину и направление, то вектор в выражении для
Слайд 6
Единица работы – джоуль (Дж). 1 Дж – работа, совершаемая силой 1
Единица работы – джоуль (Дж). 1 Дж – работа, совершаемая силой 1
Слайд 7 Для характеристики скорости, с которой совершается работа, вводят величину, называемую мощностью.
Мощность
Для характеристики скорости, с которой совершается работа, вводят величину, называемую мощностью.
Мощность
Слайд 8 Учитывая, что , получим
Таким образом, мощность, развиваемая силой , равна скалярному произведению
Учитывая, что , получим
Таким образом, мощность, развиваемая силой , равна скалярному произведению
Слайд 9 Мощность – скалярная величина. Единица мощности – ватт (Вт):
1 Вт –
Мощность – скалярная величина. Единица мощности – ватт (Вт):
1 Вт –
Слайд 10 Существуют различные формы движения материи – механическая, тепловая, электромагнитная, ядерная и др.
Существуют различные формы движения материи – механическая, тепловая, электромагнитная, ядерная и др.
Слайд 11 В механике различают два вида энергии – кинетическую и потенциальную.
Кинетическая энергия
В механике различают два вида энергии – кинетическую и потенциальную.
Кинетическая энергия
Слайд 12 Таким образом,
То есть работа силы идет на приращение некоторой величины (стоящей в
Таким образом,
То есть работа силы идет на приращение некоторой величины (стоящей в
Слайд 13При конечном перемещении из точки 1 в точку 2 работа силы идет
При конечном перемещении из точки 1 в точку 2 работа силы идет
Слайд 14Потенциальная энергия – это механическая энергия системы тел, определяемая их взаимным расположением
Потенциальная энергия – это механическая энергия системы тел, определяемая их взаимным расположением
Слайд 15Пусть взаимодействие между телами осуществляется с помощью силовых полей (например, поле гравитационных
Пусть взаимодействие между телами осуществляется с помощью силовых полей (например, поле гравитационных
Слайд 16 Тело, находящееся в поле консервативных сил, обладает потенциальной энергией EП. Работа консервативной
Тело, находящееся в поле консервативных сил, обладает потенциальной энергией EП. Работа консервативной
Слайд 17
Работа консервативных сил на конечном участке пути 1 – 2
Потенциальная энергия –
Работа консервативных сил на конечном участке пути 1 – 2
Потенциальная энергия –
Слайд 18
Конкретный вид функции EП зависит от характера силового поля. Например, потенциальная энергия
Конкретный вид функции EП зависит от характера силового поля. Например, потенциальная энергия
Слайд 19 Потенциальной энергией может обладать не только система тел, но и отдельно
Потенциальной энергией может обладать не только система тел, но и отдельно
Слайд 20 При возвращении пружины из деформированного в недеформированное состояние сила упругости совершает работу
Если
При возвращении пружины из деформированного в недеформированное состояние сила упругости совершает работу
Если
Слайд 21 Полная механическая энергия системы
E=EK + EП ,
т.е. равна сумме кинетической и
Полная механическая энергия системы
E=EK + EП ,
т.е. равна сумме кинетической и
Слайд 22
Связь между потенциальной энергией и силой.
Потенциальная энергия тела зависит от его координат:
Связь между потенциальной энергией и силой.
Потенциальная энергия тела зависит от его координат:
Слайд 23 Рассмотрим перемещение тела под действием силы F. Разложим силу на три составляющие
Рассмотрим перемещение тела под действием силы F. Разложим силу на три составляющие
Слайд 24Эту работу можно представить как убыль
потенциальной энергии:
Из сравнения последних выражений имеем:
Отсюда
Здесь -
Эту работу можно представить как убыль
потенциальной энергии:
Из сравнения последних выражений имеем:
Отсюда
Здесь -
Слайд 25 Такие производные называются частными и обозначаются символом
Итак,
Эти три формулы можно объединить
Такие производные называются частными и обозначаются символом
Итак,
Эти три формулы можно объединить
Слайд 26Или
Выражение, стоящее в скобках, называют градиентом функции и обозначают
Сила равна градиенту потенциальной
Или
Выражение, стоящее в скобках, называют градиентом функции и обозначают
Сила равна градиенту потенциальной
Слайд 27Потенциальные кривые.
Условия равновесия механической системы.
Рассмотрим материальную точку, положение которой может быть
Потенциальные кривые.
Условия равновесия механической системы.
Рассмотрим материальную точку, положение которой может быть
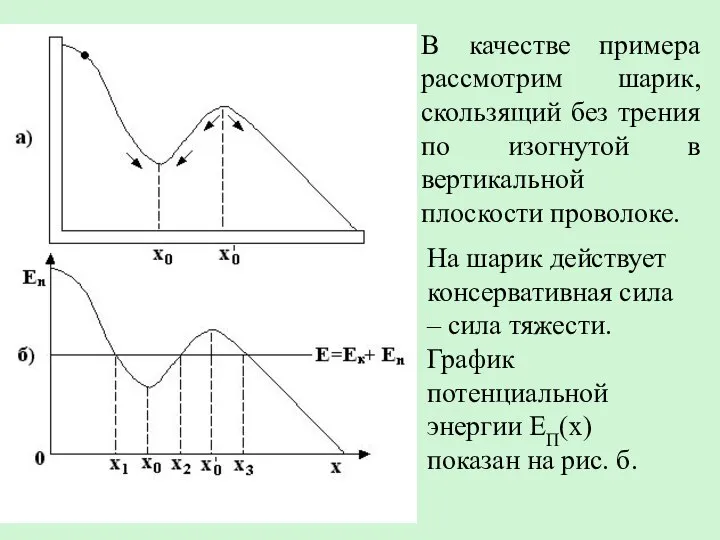
Слайд 28В качестве примера рассмотрим шарик, скользящий без трения по изогнутой в вертикальной
В качестве примера рассмотрим шарик, скользящий без трения по изогнутой в вертикальной
Слайд 29Полная энергия шарика E изображена на графике горизонтальной линией, поскольку имеет место
Полная энергия шарика E изображена на графике горизонтальной линией, поскольку имеет место
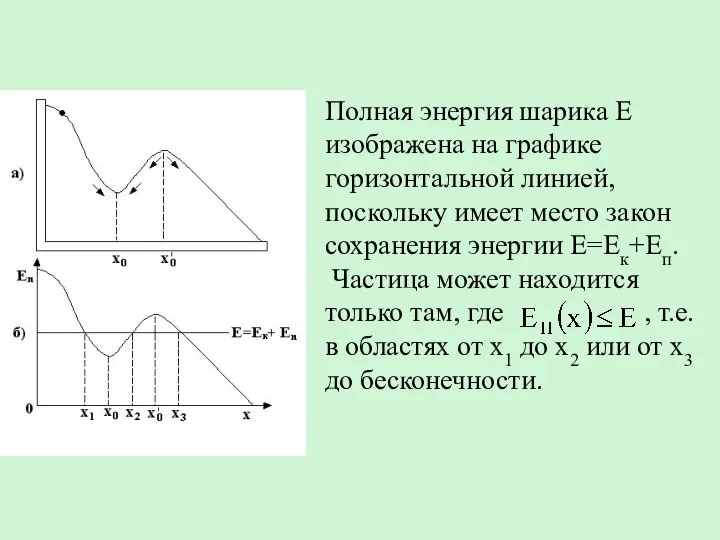
Слайд 30 В области x < x1 и x2 < x < x3 частица
В области x < x1 и x2 < x < x3 частица
Слайд 31Минимуму потенциальной энергии соответствует на графике точка с координатой x0. Условие минимума
Минимуму потенциальной энергии соответствует на графике точка с координатой x0. Условие минимума
 Классификация нагрузок и воздействий
Классификация нагрузок и воздействий Разделение смесей
Разделение смесей Модель копия самолёта И 5. Масштаб 1: 9. Стендовая модель
Модель копия самолёта И 5. Масштаб 1: 9. Стендовая модель Влияние магнитного поля на проводник с током. Правило левой руки
Влияние магнитного поля на проводник с током. Правило левой руки Закон Архимеда
Закон Архимеда Оси и валы
Оси и валы Обнаружение магнитного поля по его действию на электрический ток. Правило левой руки
Обнаружение магнитного поля по его действию на электрический ток. Правило левой руки Равноуск. движение
Равноуск. движение Теоремы динамики
Теоремы динамики Испарение. Насыщенный и ненасыщенный пар
Испарение. Насыщенный и ненасыщенный пар I-D диаграмма влажного воздуха
I-D диаграмма влажного воздуха Рассеяние света на шероховатой поверхности
Рассеяние света на шероховатой поверхности Сила Ампера
Сила Ампера INFINI™ High Intensity Focused RF. Обучение
INFINI™ High Intensity Focused RF. Обучение Магнитное взаимодействие. Искусственные и естественные магниты
Магнитное взаимодействие. Искусственные и естественные магниты История развития наноматериалов и нанотехнологий
История развития наноматериалов и нанотехнологий Звездный час. Урок – игра
Звездный час. Урок – игра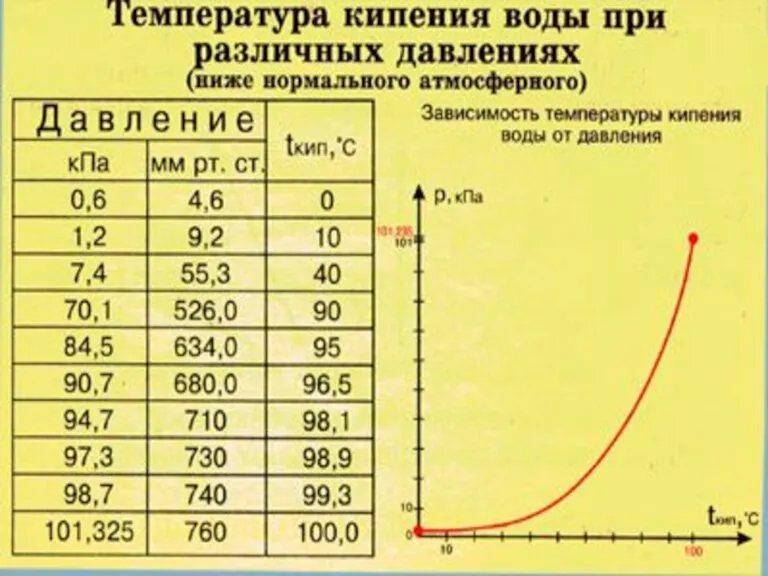 Общая физика
Общая физика Архимед и его вклад в развитие механики
Архимед и его вклад в развитие механики Энергия электромагнитных волн. Вектор Пойнтинга. Колебания и волны. 17
Энергия электромагнитных волн. Вектор Пойнтинга. Колебания и волны. 17 Магнитное поле тока. Вектор магнитной индукции
Магнитное поле тока. Вектор магнитной индукции Поршневой компрессор. Лабораторная работа
Поршневой компрессор. Лабораторная работа Устройство нанопинцет
Устройство нанопинцет Индукция магнитного поля
Индукция магнитного поля Инженерный старт
Инженерный старт Излучение и все о нем
Излучение и все о нем Движения. Центральная и осевая симметрия
Движения. Центральная и осевая симметрия Проводники в электрическом поле
Проводники в электрическом поле