- Механическое движение

Содержание
- 2. Совокупность неподвижных друг относительно друга тел, по отношению к которым рассматривается движение, и отсчитывающих время часов
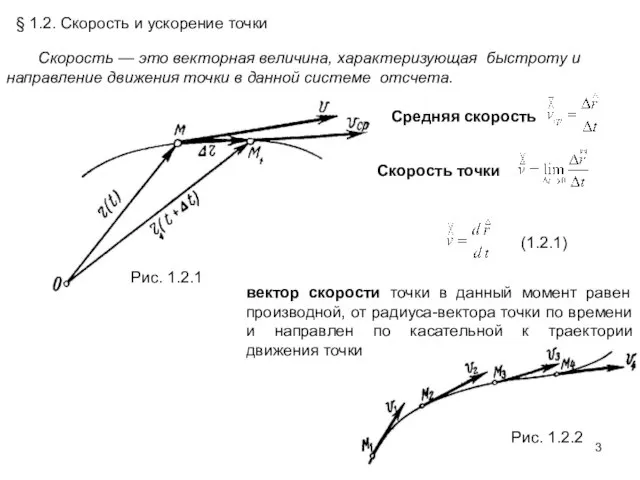
- 3. § 1.2. Скорость и ускорение точки Скорость — это векторная величина, характеризующая быстроту и направление движения
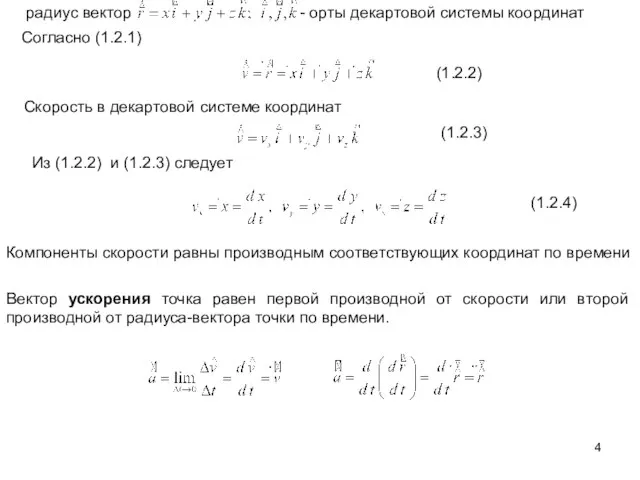
- 4. радиус вектор - орты декартовой системы координат Согласно (1.2.1) Скорость в декартовой системе координат (1.2.2) (1.2.3)
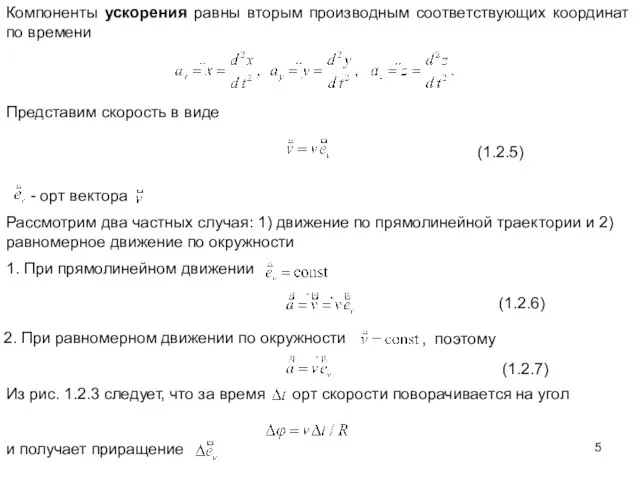
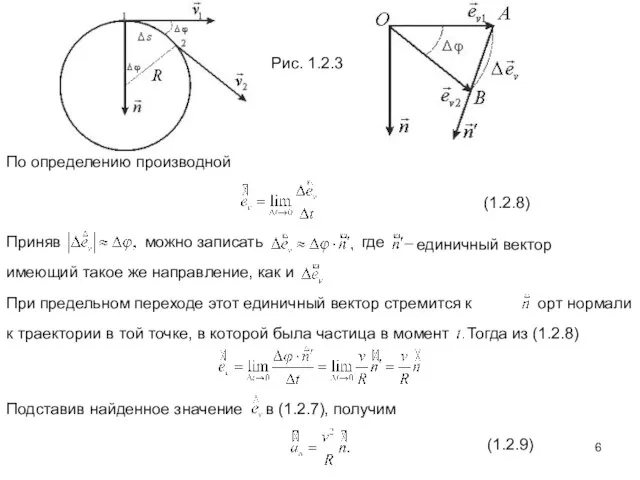
- 5. Компоненты ускорения равны вторым производным соответствующих координат по времени Представим скорость в виде (1.2.5) - орт
- 6. Рис. 1.2.3
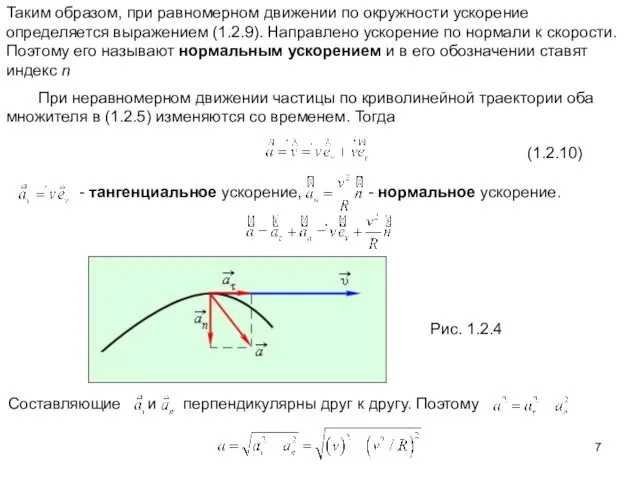
- 7. Рис. 1.2.4
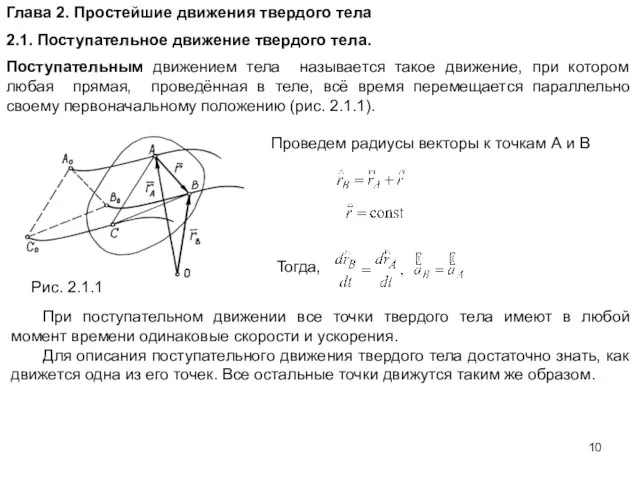
- 10. Глава 2. Простейшие движения твердого тела 2.1. Поступательное движение твердого тела. Поступательным движением тела называется такое
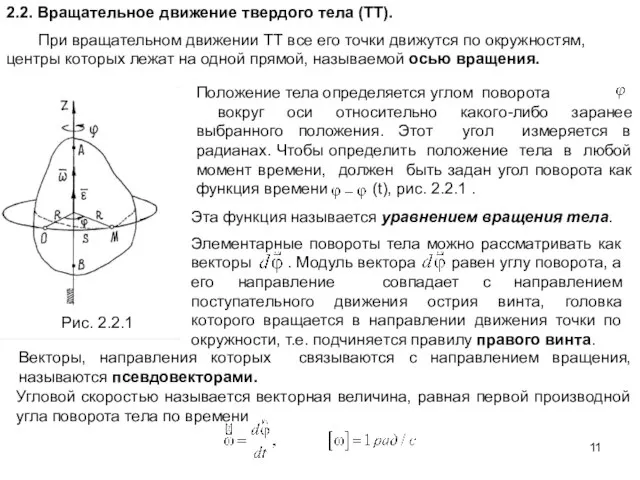
- 11. 2.2. Вращательное движение твердого тела (ТТ). При вращательном движении ТТ все его точки движутся по окружностям,
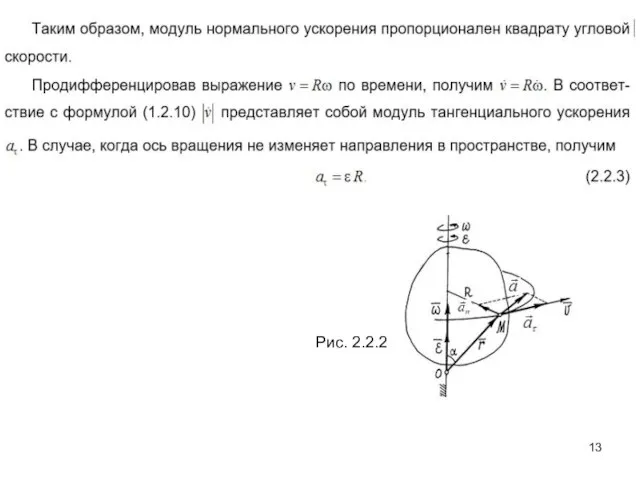
- 13. Рис. 2.2.2
- 16. Скачать презентацию
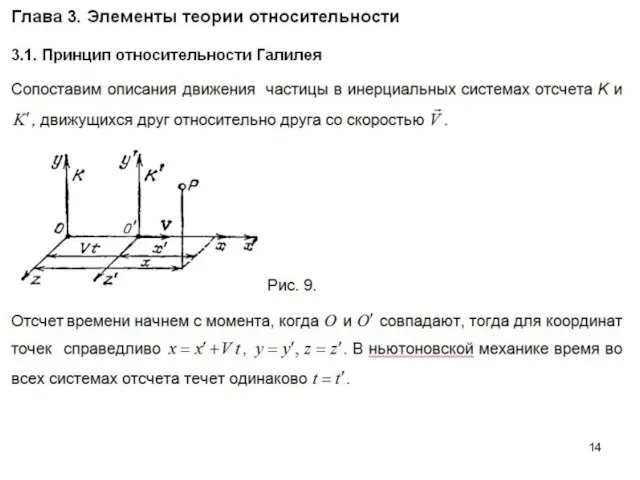
Слайд 2 Совокупность неподвижных друг относительно друга тел, по отношению к которым рассматривается движение,
Совокупность неподвижных друг относительно друга тел, по отношению к которым рассматривается движение,
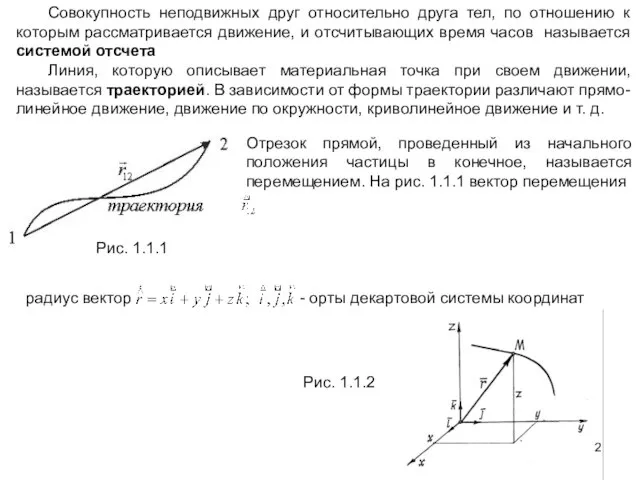
Слайд 3§ 1.2. Скорость и ускорение точки
Скорость — это векторная величина, характеризующая быстроту
§ 1.2. Скорость и ускорение точки
Скорость — это векторная величина, характеризующая быстроту
Слайд 4радиус вектор - орты декартовой системы координат
Согласно (1.2.1)
Скорость в декартовой системе
радиус вектор - орты декартовой системы координат
Согласно (1.2.1)
Скорость в декартовой системе
Слайд 5Компоненты ускорения равны вторым производным соответствующих координат по времени
Представим скорость в виде
(1.2.5)
Компоненты ускорения равны вторым производным соответствующих координат по времени
Представим скорость в виде
(1.2.5)
Слайд 6Рис. 1.2.3
Рис. 1.2.3
Слайд 7Рис. 1.2.4
Рис. 1.2.4
Слайд 10Глава 2. Простейшие движения твердого тела
2.1. Поступательное движение твердого тела.
Поступательным движением тела
Глава 2. Простейшие движения твердого тела
2.1. Поступательное движение твердого тела.
Поступательным движением тела
Слайд 112.2. Вращательное движение твердого тела (ТТ).
При вращательном движении ТТ все его точки
2.2. Вращательное движение твердого тела (ТТ).
При вращательном движении ТТ все его точки
Слайд 13Рис. 2.2.2
Рис. 2.2.2
 Степень окисления
Степень окисления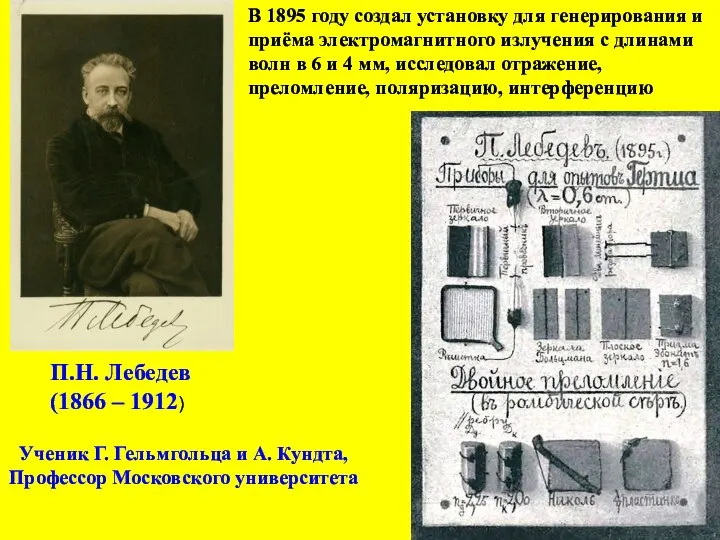 Давление света
Давление света Презентация на тему газовые законы
Презентация на тему газовые законы  Физические и химические явления
Физические и химические явления Расчет деревянных балок
Расчет деревянных балок Мембранные процессы
Мембранные процессы Состав и характеристика атомного ядра. Лекция16
Состав и характеристика атомного ядра. Лекция16 Явления тяготения. Сила тяжести
Явления тяготения. Сила тяжести Генератор 2ГВ-008
Генератор 2ГВ-008 Индивидуальны й учебный проект по дисциплине физика
Индивидуальны й учебный проект по дисциплине физика Презентация на тему Основные понятия и законы динамики
Презентация на тему Основные понятия и законы динамики  Электричество и магнетизм. Электрическое поле в диэлектриках (Лекция 5)
Электричество и магнетизм. Электрическое поле в диэлектриках (Лекция 5) Расчет стержневых систем
Расчет стержневых систем Электромагнитное поле
Электромагнитное поле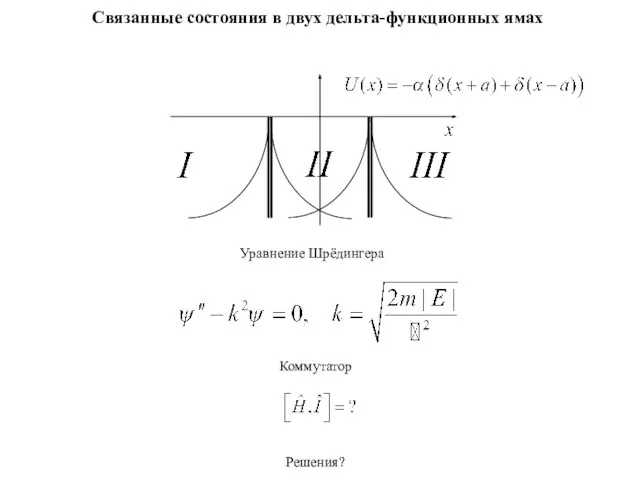 Связанные состояния в двух дельта - функционных ямах
Связанные состояния в двух дельта - функционных ямах Расчет на прочность при кручении
Расчет на прочность при кручении Ядерные реакции и их воздействия
Ядерные реакции и их воздействия Движение твердой среды
Движение твердой среды Основные представления о напряженном состоянии горных пород
Основные представления о напряженном состоянии горных пород Допуски и посадки цилиндрических соединенийпп
Допуски и посадки цилиндрических соединенийпп Отражение света
Отражение света Презентация на тему Методы наблюдения и регистрации элементарных частиц
Презентация на тему Методы наблюдения и регистрации элементарных частиц  Электромагнитные колебания. Колебательный контур
Электромагнитные колебания. Колебательный контур Переменный ток
Переменный ток Кинематика периодического движения (1)
Кинематика периодического движения (1) Презентация на тему Урок решения задач на плавление и кристаллизацию тел
Презентация на тему Урок решения задач на плавление и кристаллизацию тел  Воздухоплавание
Воздухоплавание Скорость при прямолинейном равноускоренном движении
Скорость при прямолинейном равноускоренном движении