- Механизмы с пассивными звеньями и избыточными связями. Лекция №3

Содержание
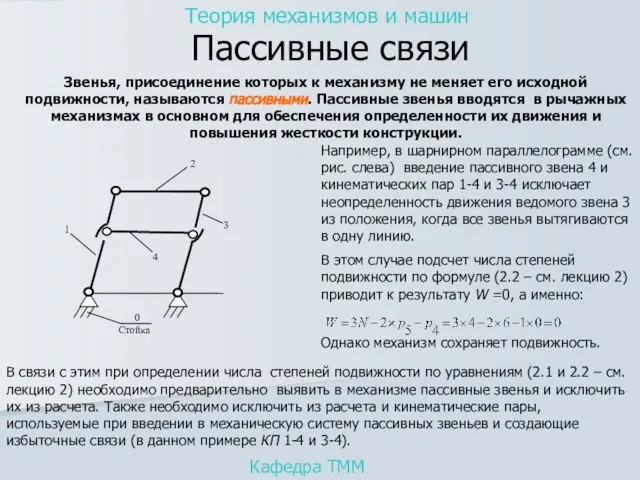
- 2. Пассивные связи Кафедра ТММ Теория механизмов и машин Звенья, присоединение которых к механизму не меняет его
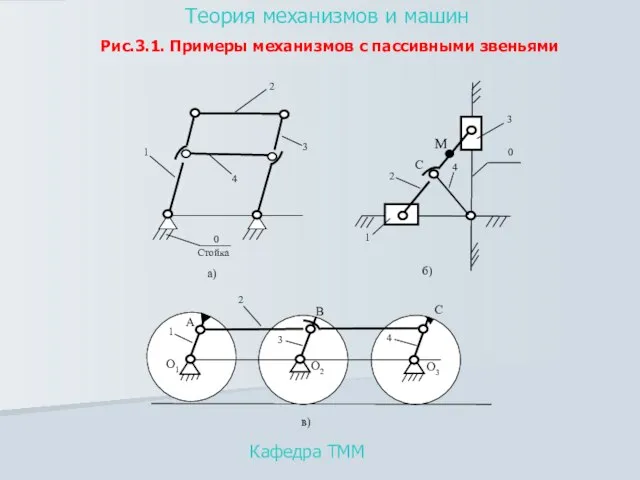
- 3. Кафедра ТММ Теория механизмов и машин Рис.3.1. Примеры механизмов с пассивными звеньями
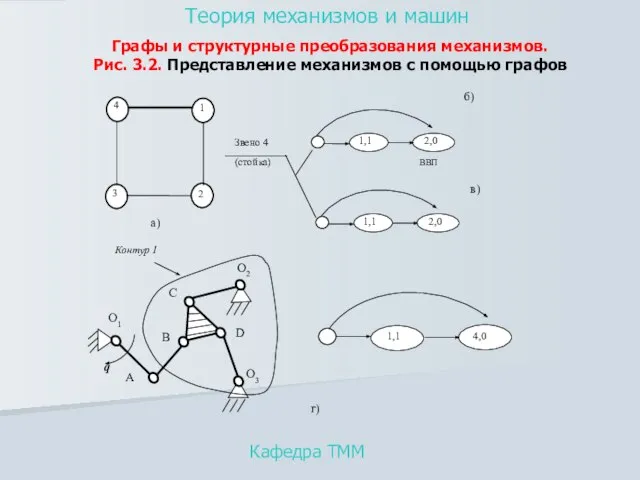
- 4. Кафедра ТММ Теория механизмов и машин Графы и структурные преобразования механизмов. Рис. 3.2. Представление механизмов с
- 5. Кафедра ТММ Теория механизмов и машин Графы и структурные преобразования механизмов. Рис. 3.2. Представление механизмов с
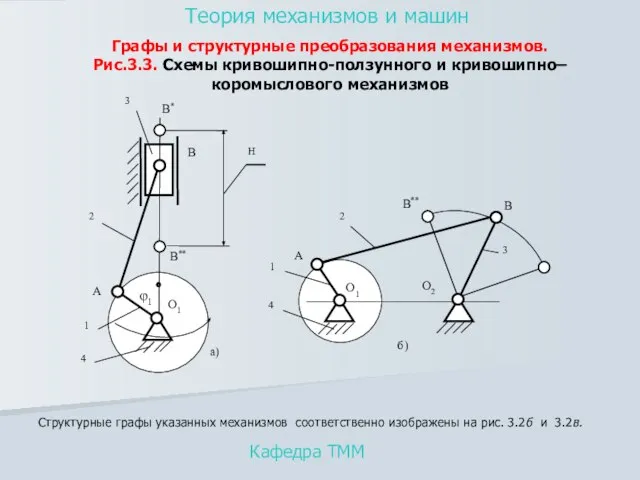
- 6. Кафедра ТММ Теория механизмов и машин Графы и структурные преобразования механизмов. Рис.3.3. Схемы кривошипно-ползунного и кривошипно–коромыслового
- 8. Скачать презентацию
Слайд 2Пассивные связи
Кафедра ТММ
Теория механизмов и машин
Звенья, присоединение которых к механизму не
Пассивные связи
Кафедра ТММ
Теория механизмов и машин
Звенья, присоединение которых к механизму не
Слайд 3Кафедра ТММ
Теория механизмов и машин
Рис.3.1. Примеры механизмов с пассивными звеньями
Кафедра ТММ
Теория механизмов и машин
Рис.3.1. Примеры механизмов с пассивными звеньями
Слайд 4Кафедра ТММ
Теория механизмов и машин
Графы и структурные преобразования механизмов.
Рис. 3.2. Представление
Кафедра ТММ
Теория механизмов и машин
Графы и структурные преобразования механизмов. Рис. 3.2. Представление
Слайд 5Кафедра ТММ
Теория механизмов и машин
Графы и структурные преобразования механизмов.
Рис. 3.2. Представление
Кафедра ТММ
Теория механизмов и машин
Графы и структурные преобразования механизмов. Рис. 3.2. Представление

Слайд 6Кафедра ТММ
Теория механизмов и машин
Графы и структурные преобразования механизмов.
Рис.3.3. Схемы кривошипно-ползунного
Кафедра ТММ
Теория механизмов и машин
Графы и структурные преобразования механизмов. Рис.3.3. Схемы кривошипно-ползунного
 Электромагнитные волны. Радиоволны. Спектр электромагнитных волн
Электромагнитные волны. Радиоволны. Спектр электромагнитных волн Рационализация организации движения автобусов на маршруте Ул. Украинская - МКР. Соцгород
Рационализация организации движения автобусов на маршруте Ул. Украинская - МКР. Соцгород Презентация на тему Двигатель внутреннего сгорания: принципы
Презентация на тему Двигатель внутреннего сгорания: принципы  Метод составления уравнений движения гибкого кольца при неголономных ограничениях для создания волнового гироскопа
Метод составления уравнений движения гибкого кольца при неголономных ограничениях для создания волнового гироскопа Группы симметрии и операции. Прямая и обратная решетки. Дифракция. Практическая работа №3
Группы симметрии и операции. Прямая и обратная решетки. Дифракция. Практическая работа №3 Разработка систем аварийной посадки квадрокоптера
Разработка систем аварийной посадки квадрокоптера Закон сохранения механической энергии. 7 класс
Закон сохранения механической энергии. 7 класс Основы динамики. Законы механики Ньютона. Силы в природе. Сила тяжести и сила всемирного тяготения. Вес. Невесомость
Основы динамики. Законы механики Ньютона. Силы в природе. Сила тяжести и сила всемирного тяготения. Вес. Невесомость Законы электростатики
Законы электростатики МДК 02.02 Контрольно-измерительные приборы
МДК 02.02 Контрольно-измерительные приборы Звуковые волны
Звуковые волны Виды соединения проводников. Работа тока
Виды соединения проводников. Работа тока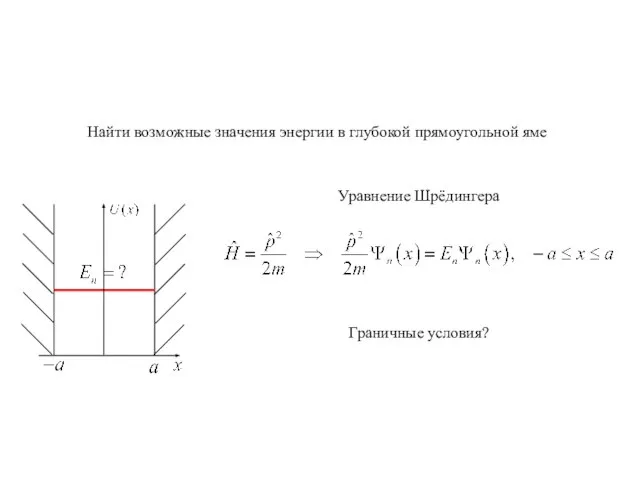 Глубокая яма
Глубокая яма тела и вещества 6 класс 1
тела и вещества 6 класс 1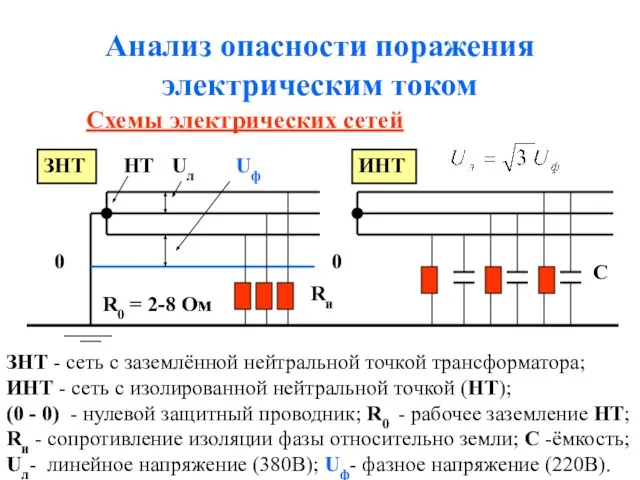 Презентация на тему Анализ опасности поражения электрическим током
Презентация на тему Анализ опасности поражения электрическим током  Электрические явления. Звездный час
Электрические явления. Звездный час Стартовый ускоритель
Стартовый ускоритель Роль русских ученых в развитии электротехники
Роль русских ученых в развитии электротехники Центр тяжести
Центр тяжести Радиоприемник своими руками
Радиоприемник своими руками Консультация по физике
Консультация по физике konspekt (1)
konspekt (1) Микромир элементарных частиц
Микромир элементарных частиц Кипение. Температура кипения
Кипение. Температура кипения Обеспечение требуемой точности машины. Тема 4
Обеспечение требуемой точности машины. Тема 4 Презентация 2
Презентация 2 Излучение и все о нем
Излучение и все о нем Момент импульса. Закон сохранения момента импульса
Момент импульса. Закон сохранения момента импульса