- Метод обращения движения

Содержание
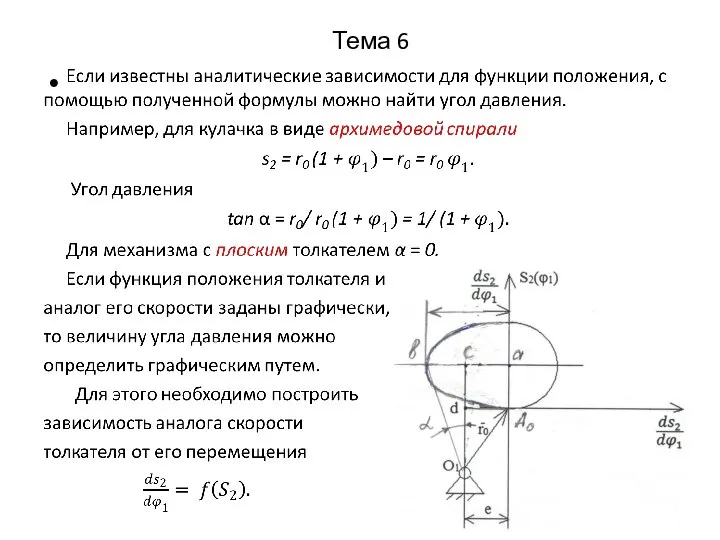
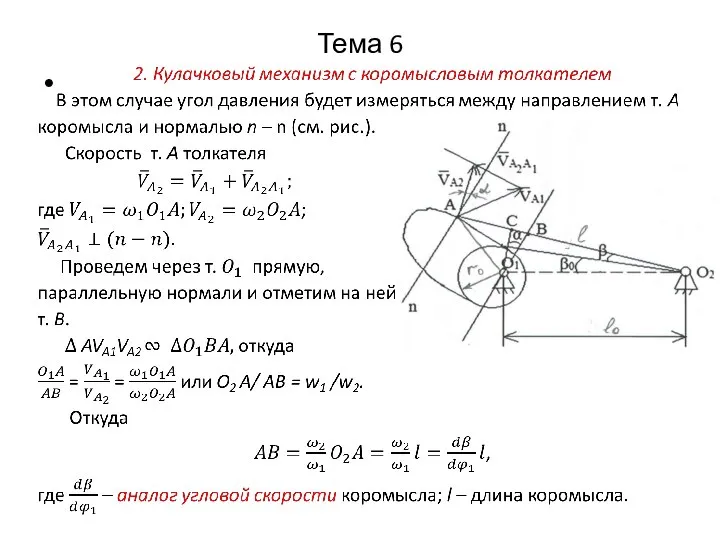
- 2. Тема 6
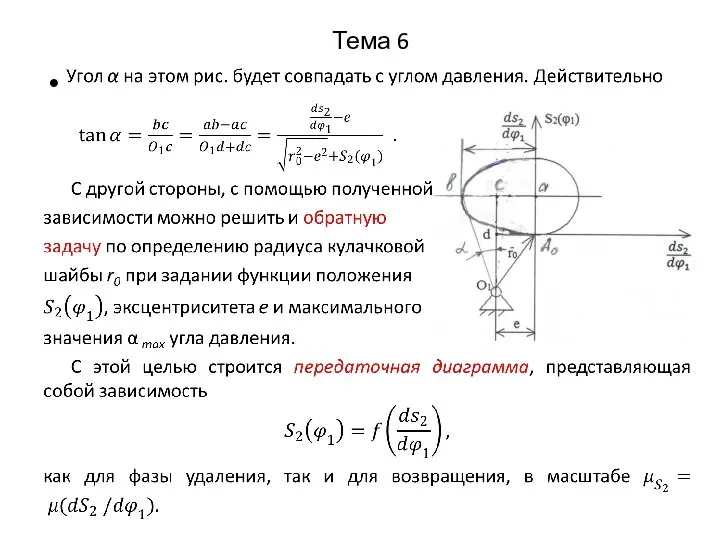
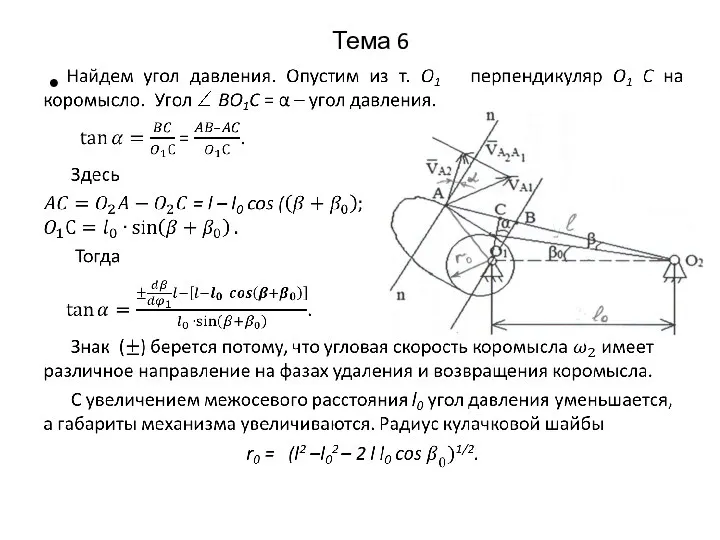
- 3. Тема 6
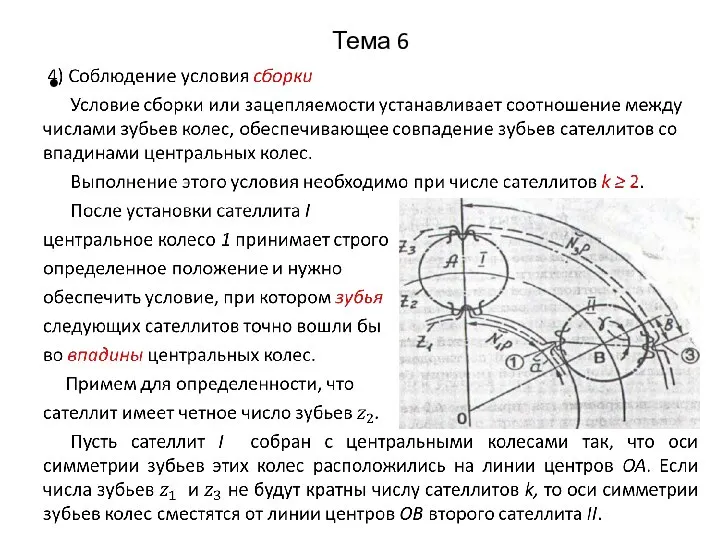
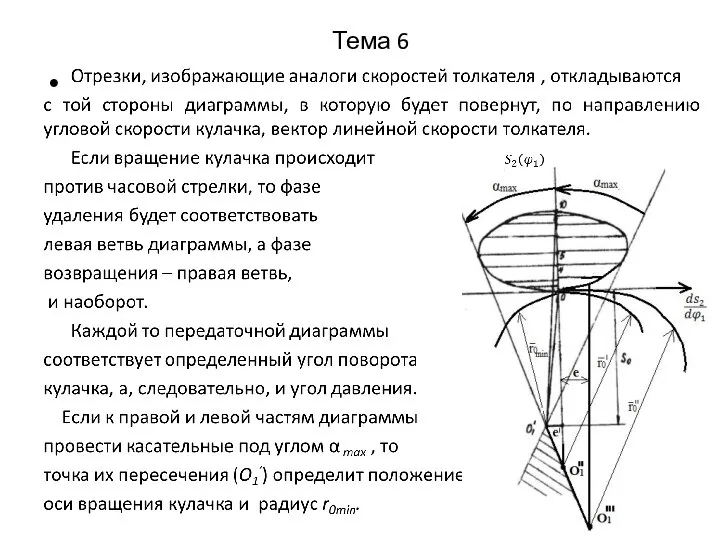
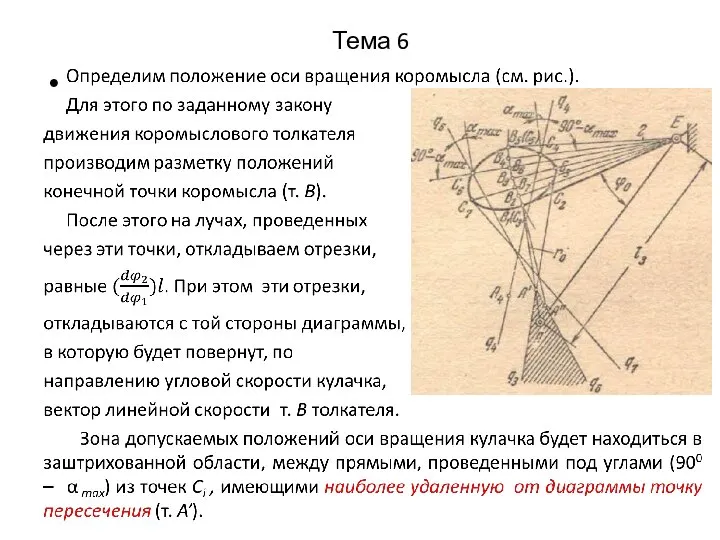
- 4. Тема 6
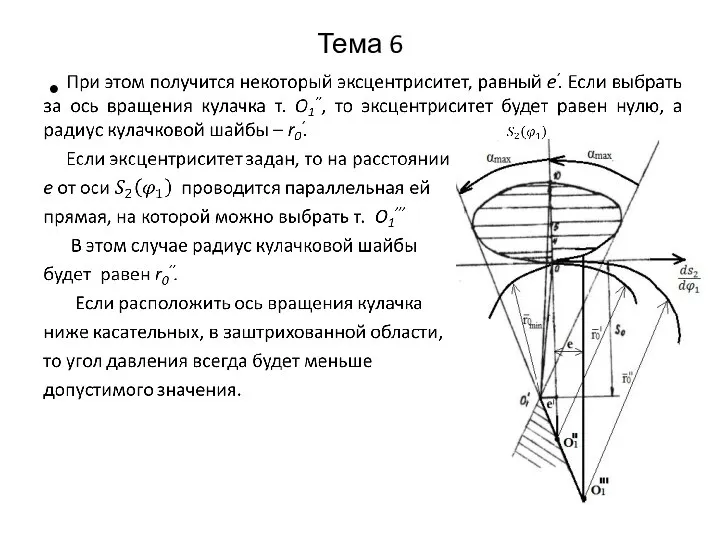
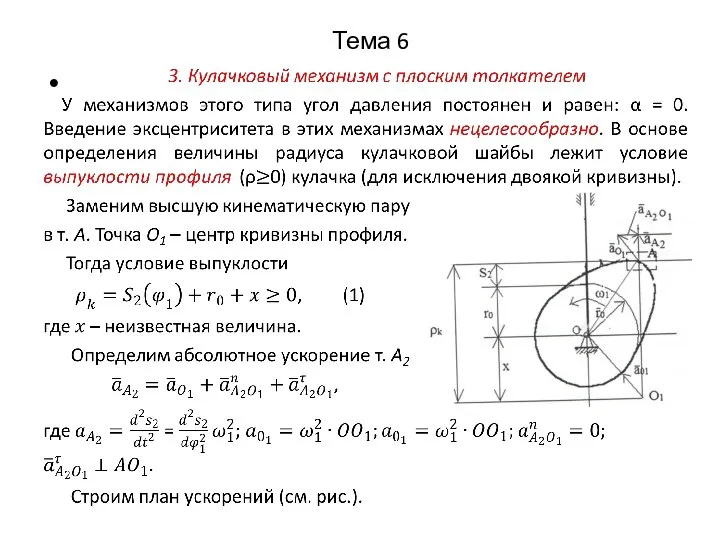
- 5. Тема 6
- 6. Тема 6
- 7. Тема 6
- 8. Тема 6
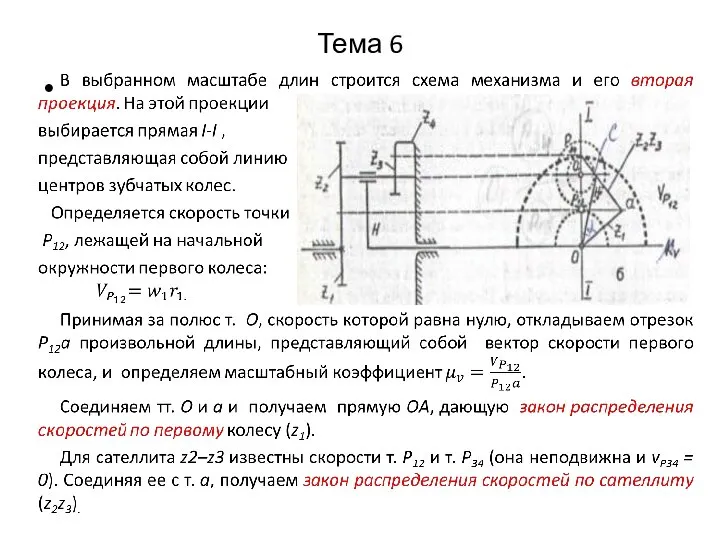
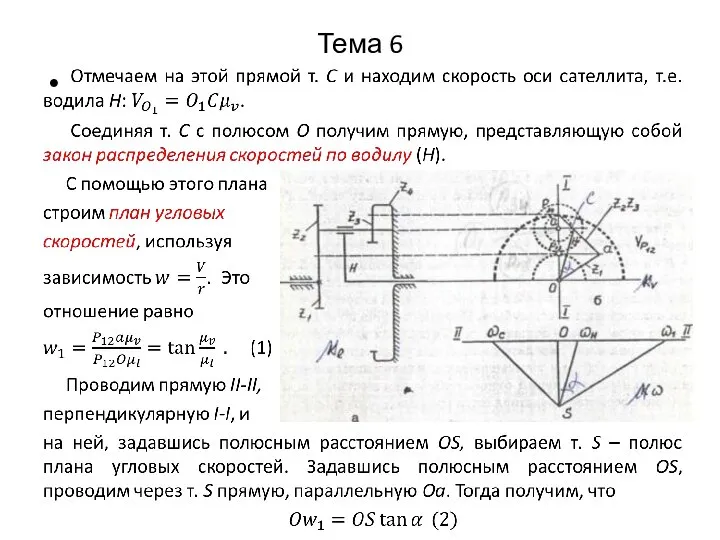
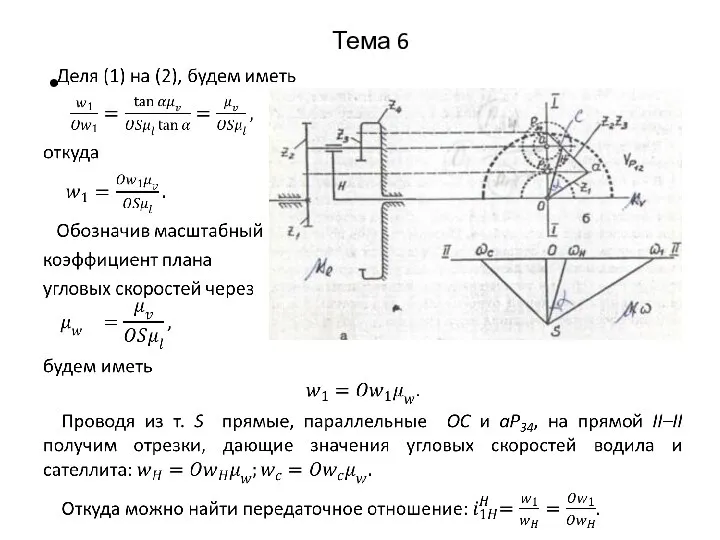
- 9. Тема 6 6.4.4. Планы линейных и угловых скоростей планетарных механизмов При кинематическом анализе и синтезе планетарных
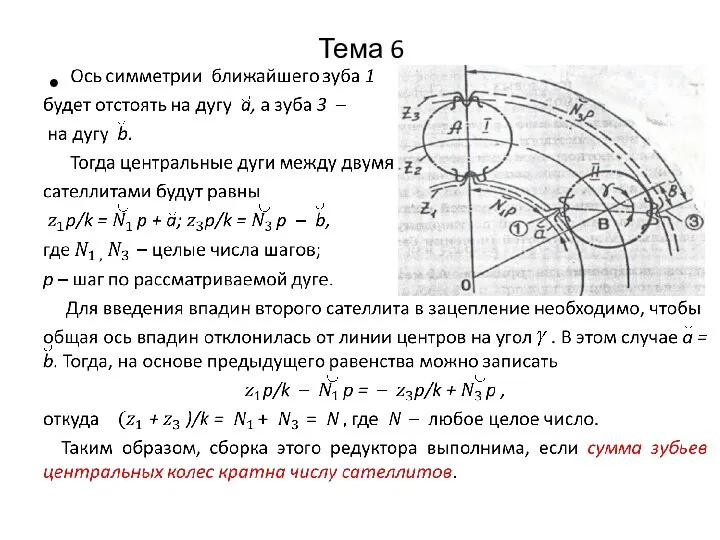
- 10. Тема 6
- 11. Тема 6
- 12. Тема 6
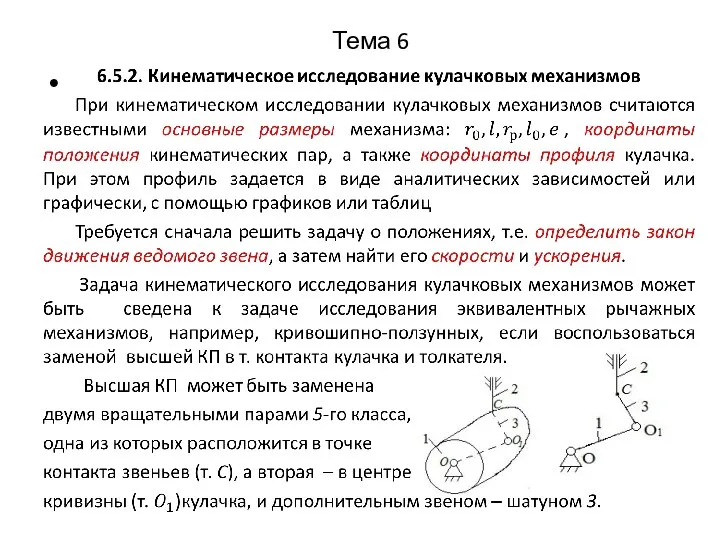
- 13. Тема 6 6.5. Синтез кулачковых механизмов 6.5.1. Общая характеристика кулачковых механизмов Кулачковый механизм – механизм, содержащий,
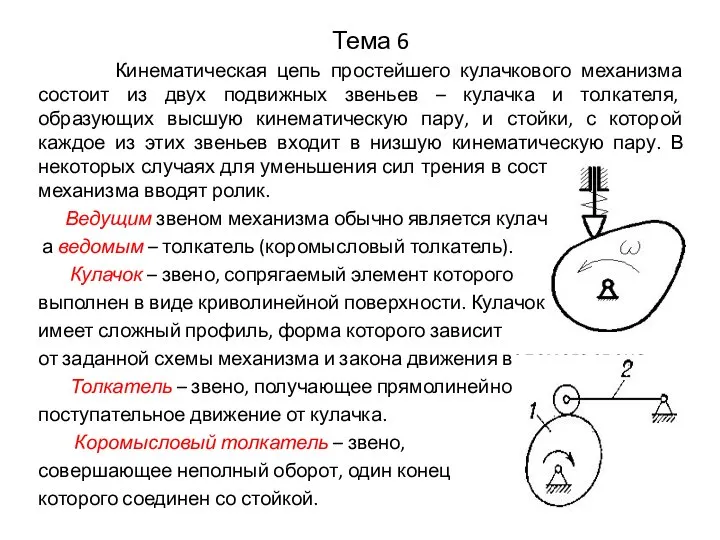
- 14. Тема 6 Кинематическая цепь простейшего кулачкового механизма состоит из двух подвижных звеньев – кулачка и толкателя,
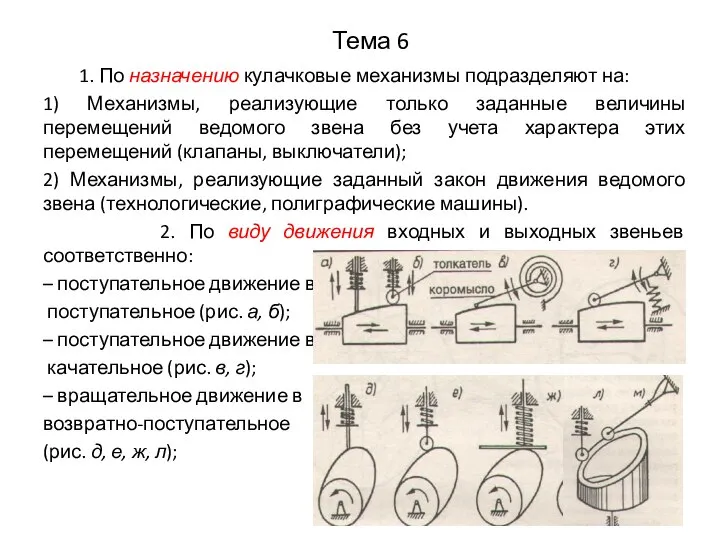
- 15. Тема 6 1. По назначению кулачковые механизмы подразделяют на: 1) Механизмы, реализующие только заданные величины перемещений
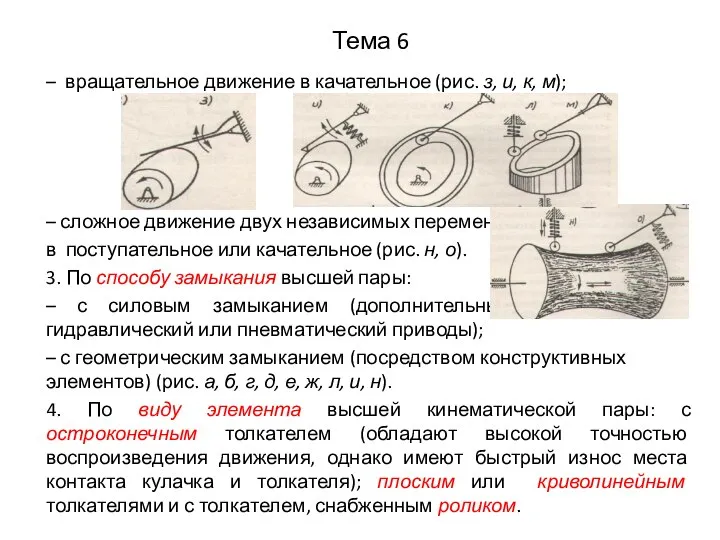
- 16. Тема 6 – вращательное движение в качательное (рис. з, и, к, м); – сложное движение двух
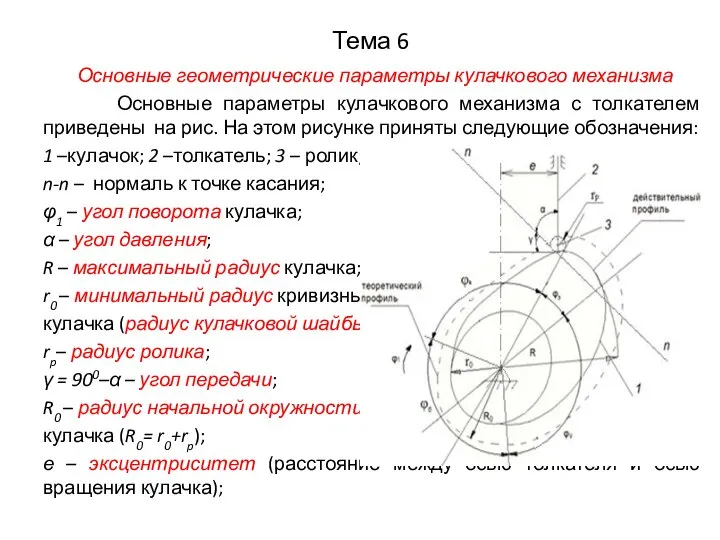
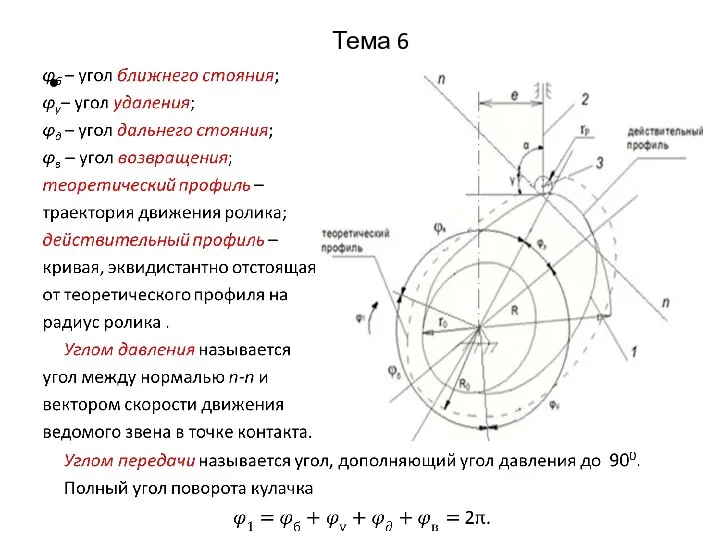
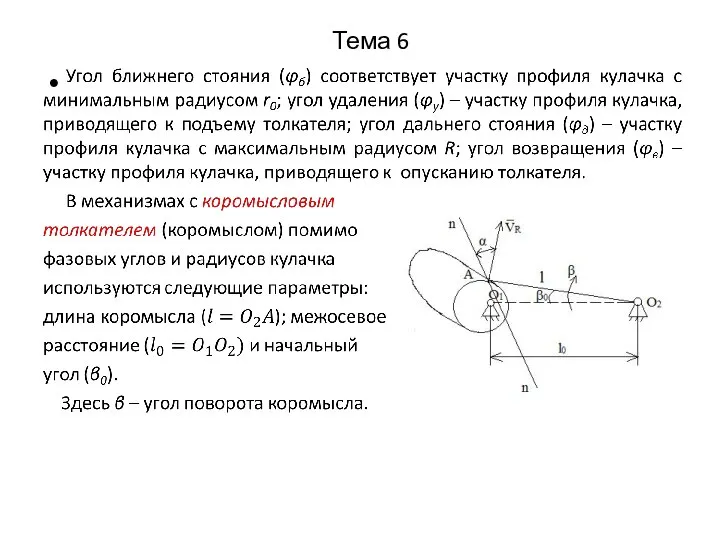
- 17. Тема 6 Основные геометрические параметры кулачкового механизма Основные параметры кулачкового механизма с толкателем приведены на рис.
- 18. Тема 6
- 19. Тема 6
- 20. Тема 6
- 21. Тема 6
- 22. Тема 6
- 23. Тема 6
- 24. Тема 6 Требуется определить закон движения толкателя β(φ). Порядок решения: Задаемся масштабным коэффициентом μl и вычерчиваем
- 25. Тема 6
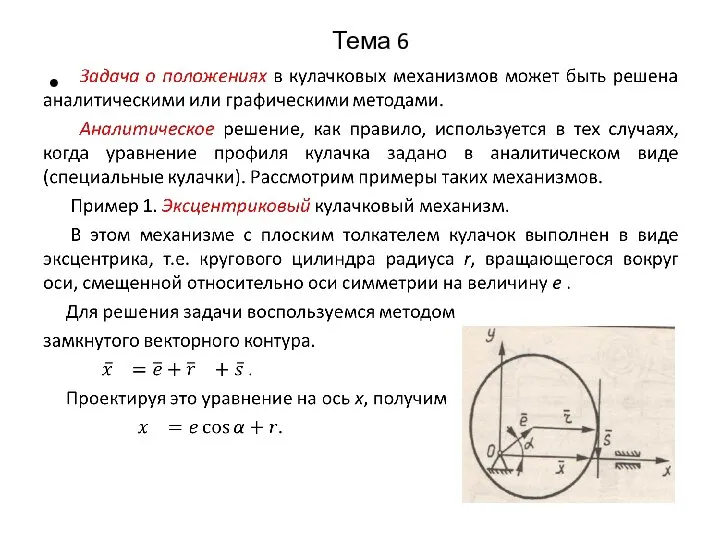
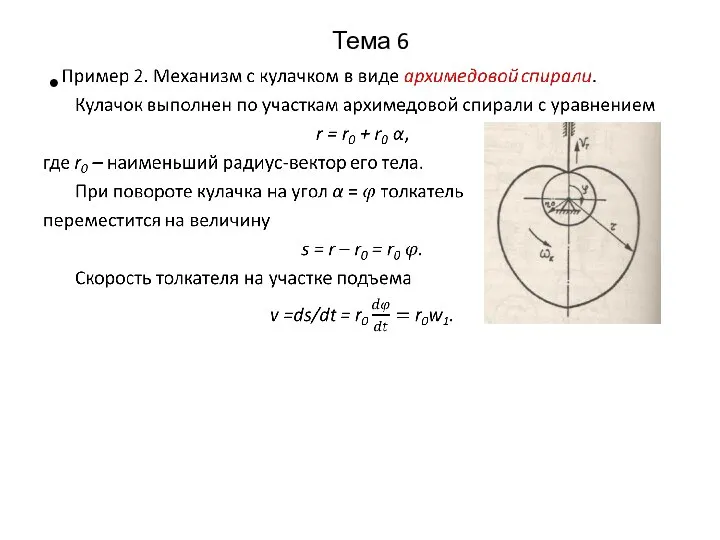
- 26. Тема 6 6.5.3. Основные задачи синтеза кулачковых механизмов Конечной целью синтеза кулачковых механизмов является проектирование профиля
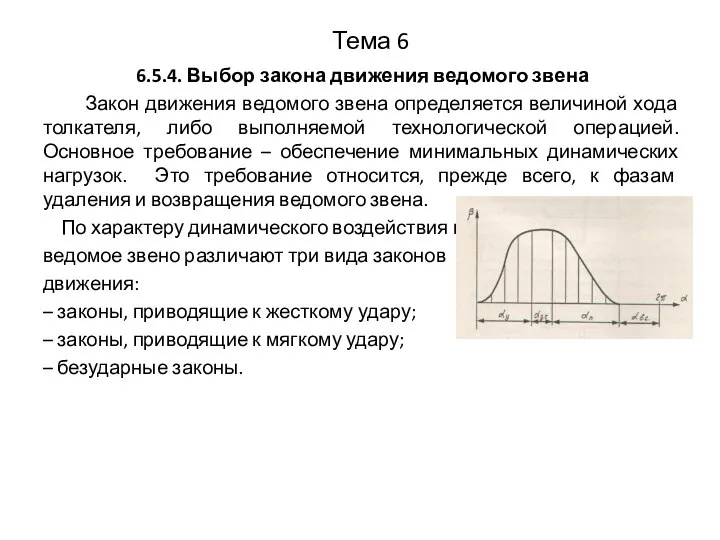
- 27. Тема 6 6.5.4. Выбор закона движения ведомого звена Закон движения ведомого звена определяется величиной хода толкателя,
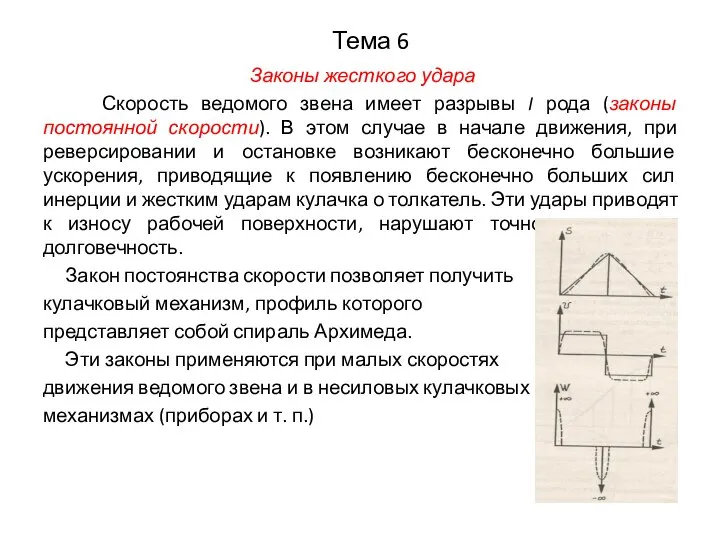
- 28. Тема 6 Законы жесткого удара Скорость ведомого звена имеет разрывы I рода (законы постоянной скорости). В
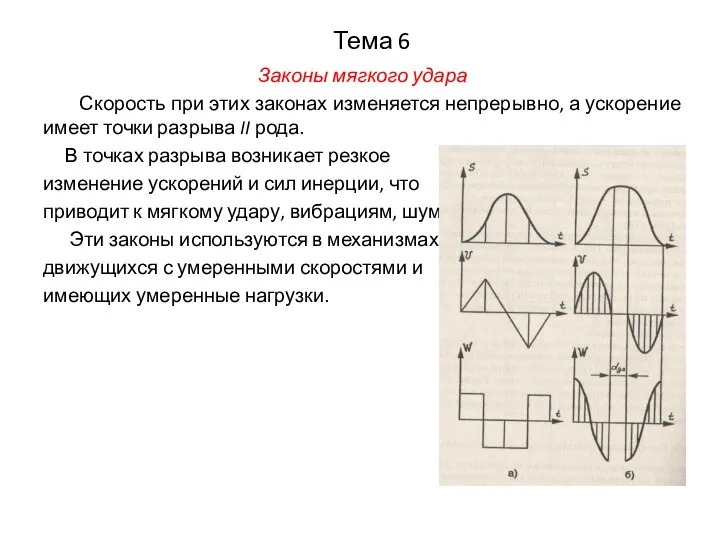
- 29. Тема 6 Законы мягкого удара Скорость при этих законах изменяется непрерывно, а ускорение имеет точки разрыва
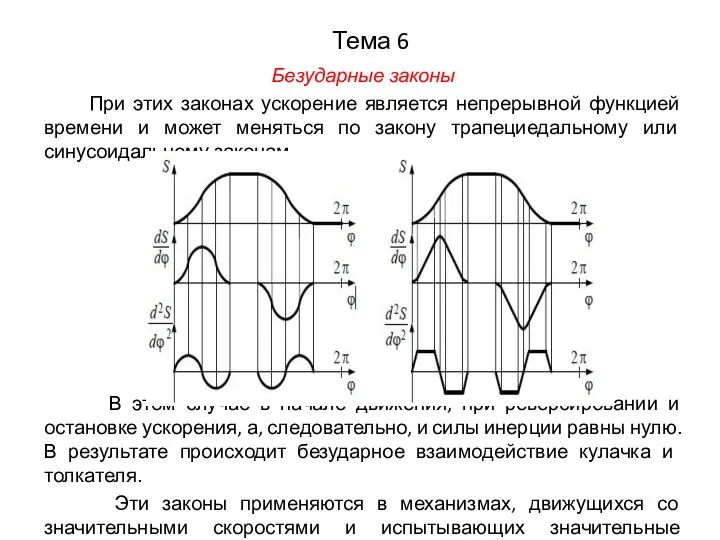
- 30. Тема 6 Безударные законы При этих законах ускорение является непрерывной функцией времени и может меняться по
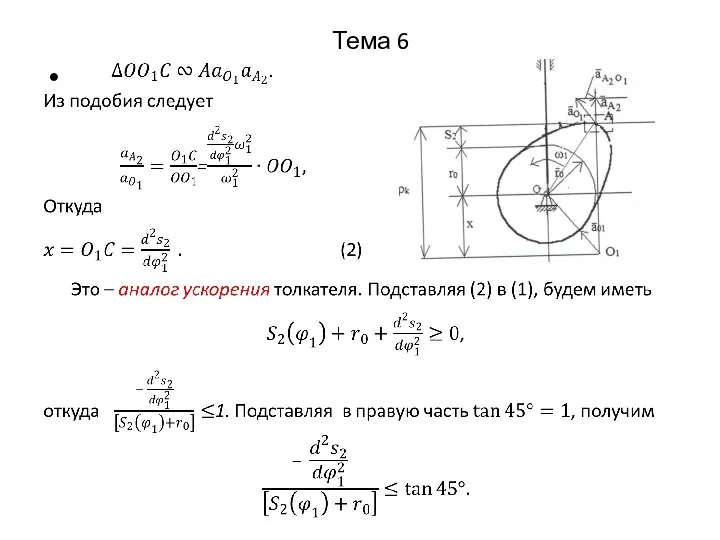
- 31. Тема 6 6.5.5.Определение основных размеров кулачковых механизмов К числу основных размеров относятся: r0 – минимальный радиус
- 32. Тема 6
- 33. Тема 6
- 34. Тема 6
- 35. Тема 6
- 36. Тема 6
- 37. Тема 6
- 38. Тема 6
- 39. Тема 6
- 40. Тема 6
- 41. Тема 6
- 42. Тема 6
- 43. Тема 6
- 45. Скачать презентацию
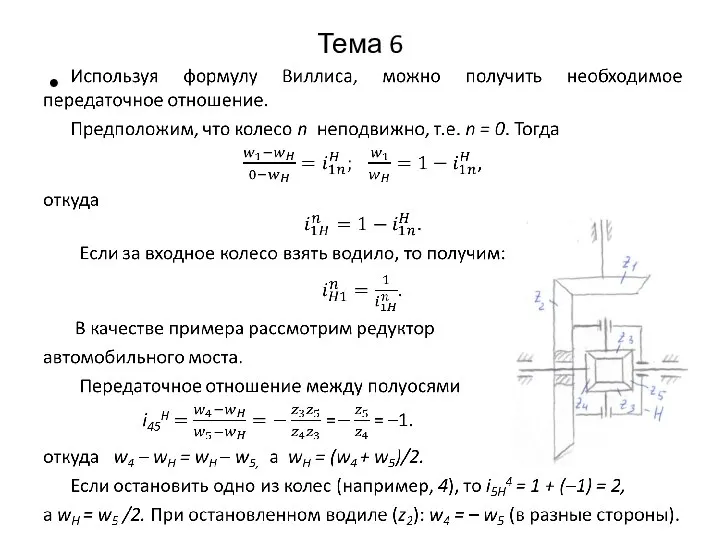
Слайд 3Тема 6
Тема 6
Слайд 4Тема 6
Тема 6
Слайд 5Тема 6
Тема 6
Слайд 6Тема 6
Тема 6
Слайд 7Тема 6
Тема 6
Слайд 8Тема 6
Тема 6
Слайд 9Тема 6
6.4.4. Планы линейных и угловых скоростей планетарных механизмов
При кинематическом
Тема 6
6.4.4. Планы линейных и угловых скоростей планетарных механизмов
При кинематическом

Слайд 10Тема 6
Тема 6
Слайд 11Тема 6
Тема 6
Слайд 12Тема 6
Тема 6
Слайд 13Тема 6
6.5. Синтез кулачковых механизмов
6.5.1. Общая характеристика кулачковых механизмов
Кулачковый механизм –
Тема 6
6.5. Синтез кулачковых механизмов
6.5.1. Общая характеристика кулачковых механизмов
Кулачковый механизм –
Слайд 14Тема 6
Кинематическая цепь простейшего кулачкового механизма состоит из двух подвижных звеньев
Тема 6
Кинематическая цепь простейшего кулачкового механизма состоит из двух подвижных звеньев
Слайд 15Тема 6
1. По назначению кулачковые механизмы подразделяют на:
1) Механизмы, реализующие только
Тема 6
1. По назначению кулачковые механизмы подразделяют на:
1) Механизмы, реализующие только
Слайд 16Тема 6
– вращательное движение в качательное (рис. з, и, к, м);
– сложное
Тема 6
– вращательное движение в качательное (рис. з, и, к, м);
– сложное
Слайд 17Тема 6
Основные геометрические параметры кулачкового механизма
Основные параметры кулачкового механизма с толкателем
Тема 6
Основные геометрические параметры кулачкового механизма
Основные параметры кулачкового механизма с толкателем
Слайд 18Тема 6
Тема 6
Слайд 19Тема 6
Тема 6
Слайд 20Тема 6
Тема 6
Слайд 21Тема 6
Тема 6
Слайд 22Тема 6
Тема 6
Слайд 23Тема 6
Тема 6
Слайд 24Тема 6
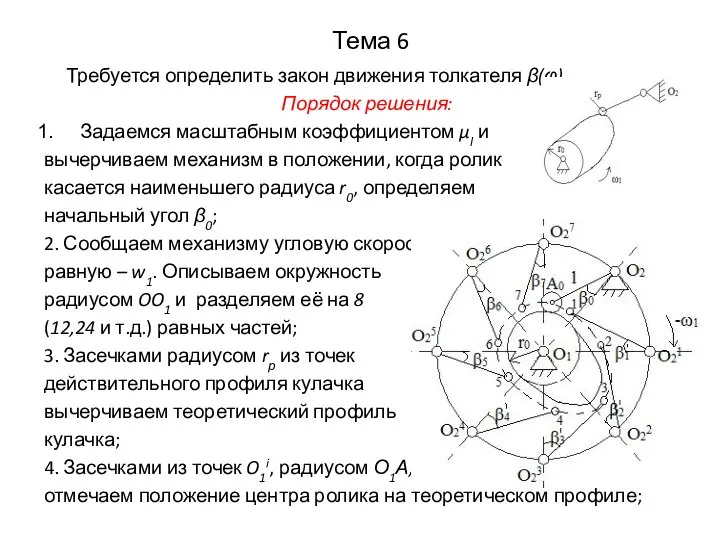
Требуется определить закон движения толкателя β(φ).
Порядок решения:
Задаемся масштабным коэффициентом μl
Тема 6
Требуется определить закон движения толкателя β(φ).
Порядок решения:
Задаемся масштабным коэффициентом μl
Слайд 25Тема 6
Тема 6
Слайд 26Тема 6
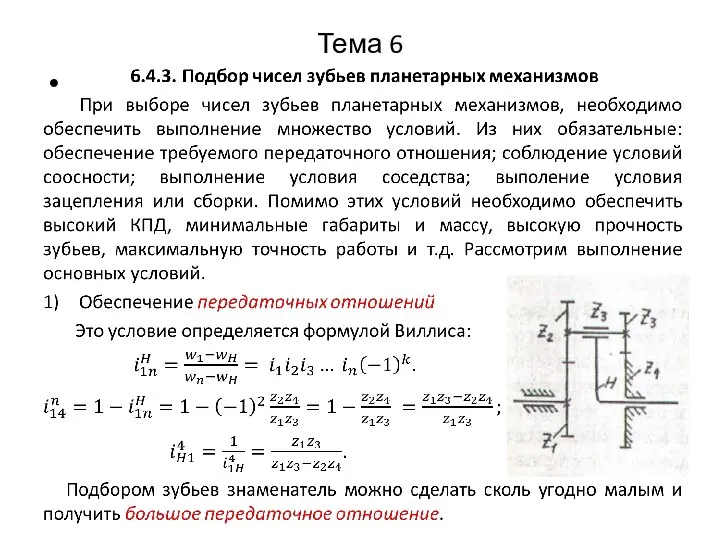
6.5.3. Основные задачи синтеза кулачковых механизмов
Конечной целью синтеза кулачковых механизмов
Тема 6
6.5.3. Основные задачи синтеза кулачковых механизмов
Конечной целью синтеза кулачковых механизмов
Слайд 27Тема 6
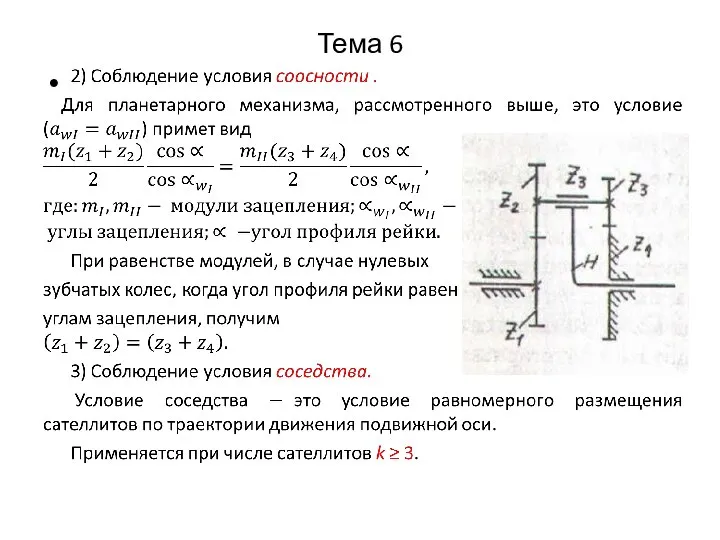
6.5.4. Выбор закона движения ведомого звена
Закон движения ведомого звена определяется
Тема 6
6.5.4. Выбор закона движения ведомого звена
Закон движения ведомого звена определяется
Слайд 28Тема 6
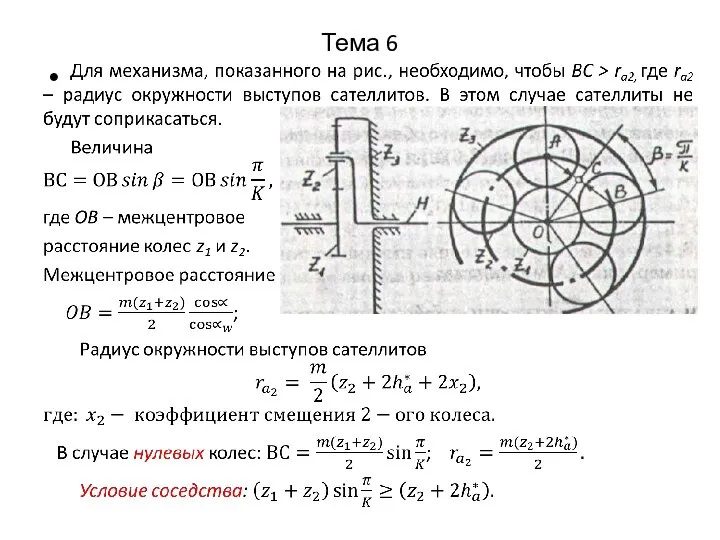
Законы жесткого удара
Скорость ведомого звена имеет разрывы I рода (законы
Тема 6
Законы жесткого удара
Скорость ведомого звена имеет разрывы I рода (законы
Слайд 29Тема 6
Законы мягкого удара
Скорость при этих законах изменяется непрерывно, а ускорение
Тема 6
Законы мягкого удара
Скорость при этих законах изменяется непрерывно, а ускорение
Слайд 30Тема 6
Безударные законы
При этих законах ускорение является непрерывной функцией времени и
Тема 6
Безударные законы
При этих законах ускорение является непрерывной функцией времени и
Слайд 31Тема 6
6.5.5.Определение основных размеров кулачковых механизмов
К числу основных размеров относятся:
r0 –
Тема 6
6.5.5.Определение основных размеров кулачковых механизмов
К числу основных размеров относятся:
r0 –
Слайд 32Тема 6
Тема 6
Слайд 33Тема 6
Тема 6
Слайд 34Тема 6
Тема 6
Слайд 35Тема 6
Тема 6
Слайд 36Тема 6
Тема 6
Слайд 37Тема 6
Тема 6
Слайд 38Тема 6
Тема 6
Слайд 39Тема 6
Тема 6
Слайд 40Тема 6
Тема 6
Слайд 41Тема 6
Тема 6
Слайд 42Тема 6
Тема 6
Слайд 43Тема 6
Тема 6
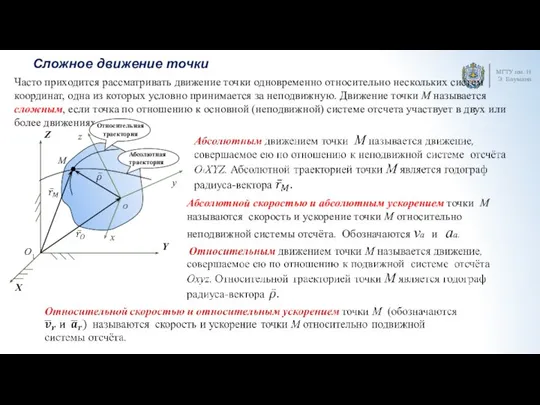 Сложное движение точки
Сложное движение точки Электромагниттік толқындар
Электромагниттік толқындар Архімедова сила. Плавання тіл. Виштовхування тіла
Архімедова сила. Плавання тіл. Виштовхування тіла График гармонического колебания
График гармонического колебания Судовые двигатели внутреннего сгорания. Лекция 11
Судовые двигатели внутреннего сгорания. Лекция 11 История числа «π» 6 класс - Презентация_
История числа «π» 6 класс - Презентация_ Свойство тела сохранять состояние покоя или свою скорость неизменной при отсутствии действия на него других тел
Свойство тела сохранять состояние покоя или свою скорость неизменной при отсутствии действия на него других тел Расчет сопротивления проводника. Удельное сопротивление
Расчет сопротивления проводника. Удельное сопротивление Нагревание проводников электрическим током. Закон Джоуля-Ленца
Нагревание проводников электрическим током. Закон Джоуля-Ленца Метрология. Измерение электрической мощности. Точность измерений
Метрология. Измерение электрической мощности. Точность измерений Уравнение состояния идеального газа. Газовые законы
Уравнение состояния идеального газа. Газовые законы Электрический ток
Электрический ток Инфракрасное излучение
Инфракрасное излучение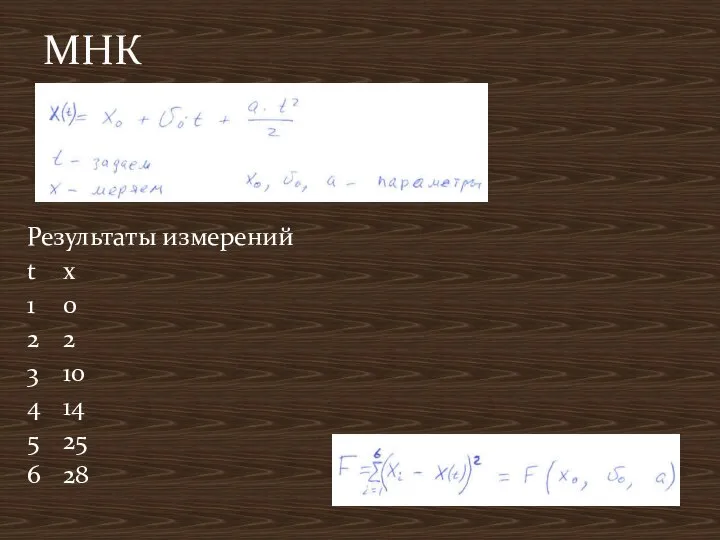 Метрология. МНК. Результаты измерений
Метрология. МНК. Результаты измерений Коробки передач. Рабочие процессы
Коробки передач. Рабочие процессы Системы управления цветом. Лекция 3. Восприятие цвета
Системы управления цветом. Лекция 3. Восприятие цвета Левитация. Электромагнитная и акустическая левитация. Сверхпроводимость
Левитация. Электромагнитная и акустическая левитация. Сверхпроводимость Достижения в науке и технике в строительстве паровых тубин
Достижения в науке и технике в строительстве паровых тубин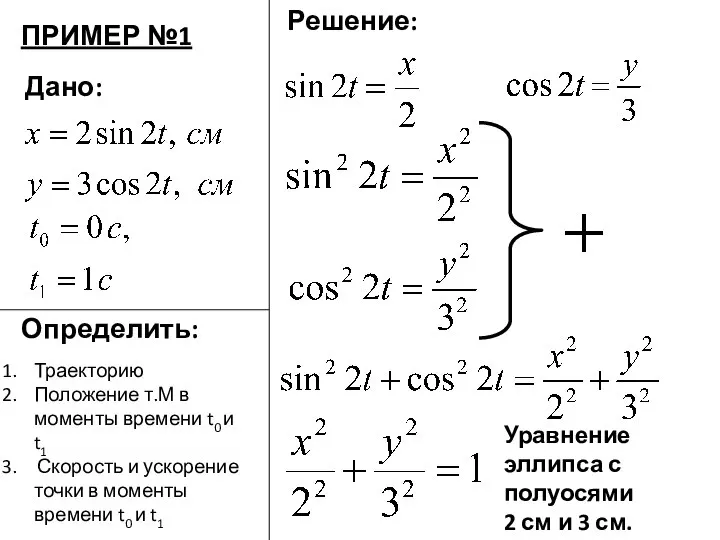 Zadacha_Kinematika_tochki_LR_2
Zadacha_Kinematika_tochki_LR_2 Энергия
Энергия 15 минут про структуру атома
15 минут про структуру атома Диэлектрики. Поляризация диэлектриков
Диэлектрики. Поляризация диэлектриков Инерциальная система отсчета. Первый закон Ньютона
Инерциальная система отсчета. Первый закон Ньютона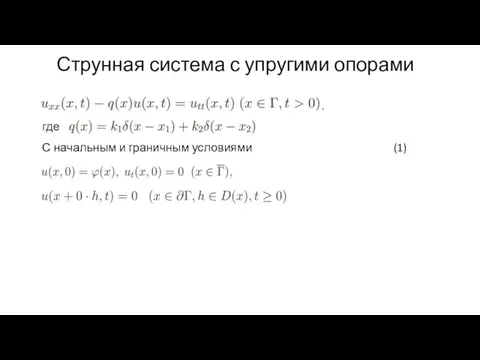 Струнная система с упругими опорами
Струнная система с упругими опорами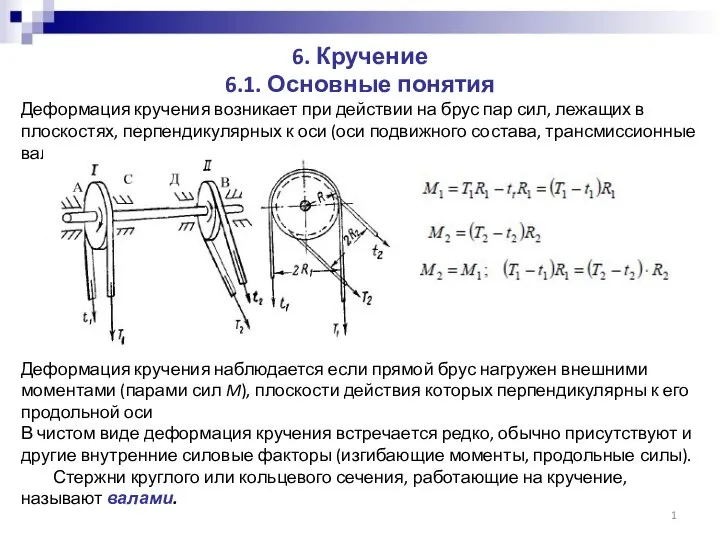 Кручение. Основные понятия
Кручение. Основные понятия Сила упругости. Закон Гука
Сила упругости. Закон Гука Инженерные решения
Инженерные решения Развитие мышления и интереса учащихся при изучении физики на примере практико-ориентированных заданий
Развитие мышления и интереса учащихся при изучении физики на примере практико-ориентированных заданий