- Метод составления уравнений движения гибкого кольца

Содержание
- 2. Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический формализм, созданный трудами Л.
- 3. Только в 1894 г. в книге «Принципы механики, изложенные в новой связи» (через 106 лет после
- 4. . К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей динамики механических систем-находит широкое
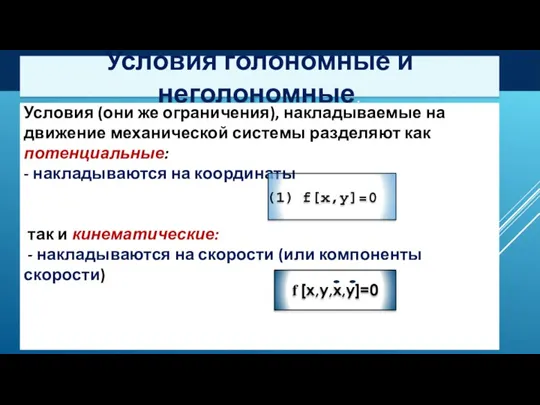
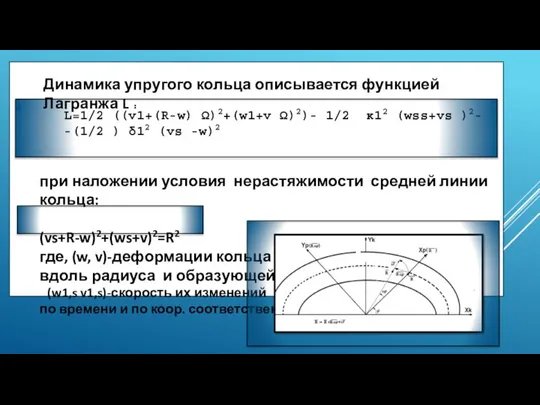
- 5. Условия голономные и неголономные. Условия (они же ограничения), накладываемые на движение механической системы разделяют как потенциальные:
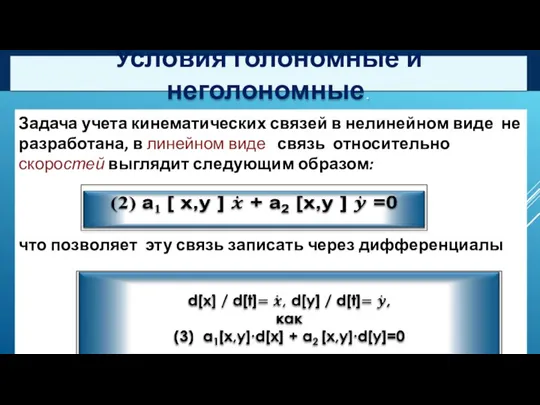
- 6. Условия голономные и неголономные. Задача учета кинематических связей в нелинейном виде не разработана, в линейном виде
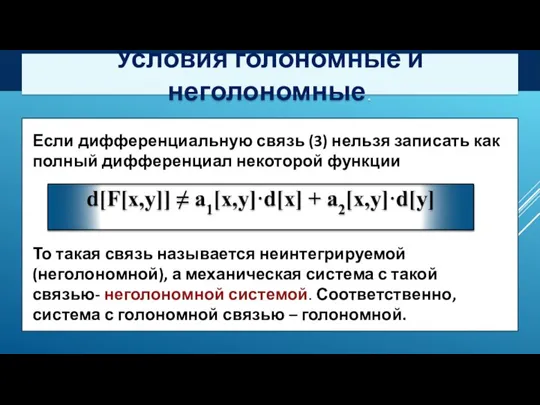
- 7. Условия голономные и неголономные. Если дифференциальную связь (3) нельзя записать как полный дифференциал некоторой функции То
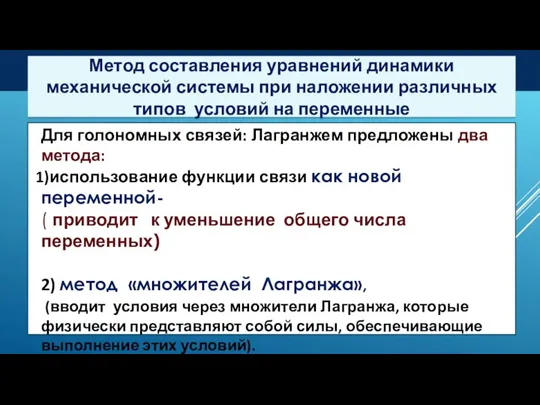
- 8. Метод составления уравнений динамики механической системы при наложении различных типов условий на переменные (2) а1 [
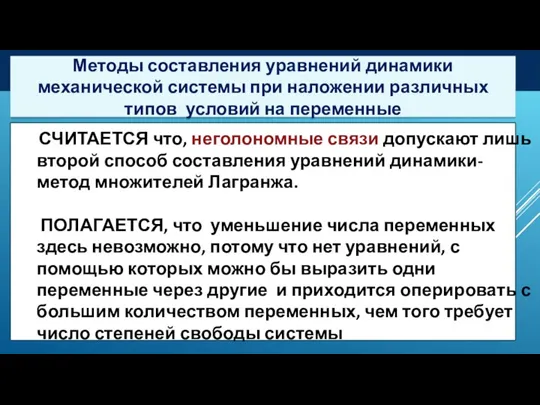
- 9. Методы составления уравнений динамики механической системы при наложении различных типов условий на переменные (2) а1 [
- 10. Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные давно предложен А. Пуанкаре и
- 11. Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона. В современных обозначениях: dΩ =d[x1]⋀d[x]-d[H]⋀d[t]
- 12. НОВЫЙ МЕТОД Поскольку из этого дифференциального инварианта следует система уравнений движения - любой механической системы, а
- 13. В случае использования интегрального инварианта механики по Картану, введение ограничений на переменные механической системы (как голономные,
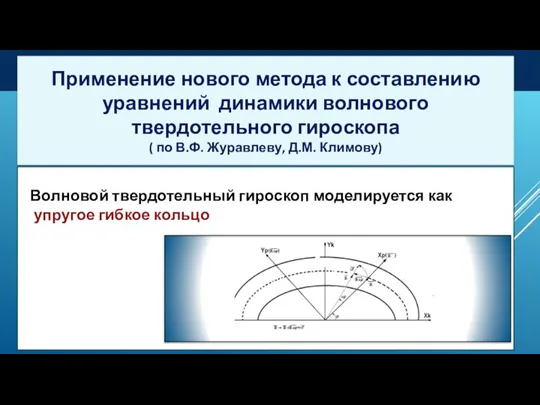
- 14. Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа ( по В.Ф. Журавлеву, Д.М. Климову)
- 15. L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2- -(1/2 ) δ12 (vs -w)2 при наложении условия
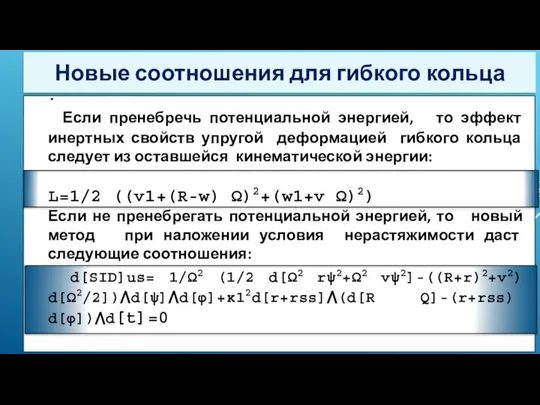
- 16. . Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией гибкого кольца следует из оставшейся
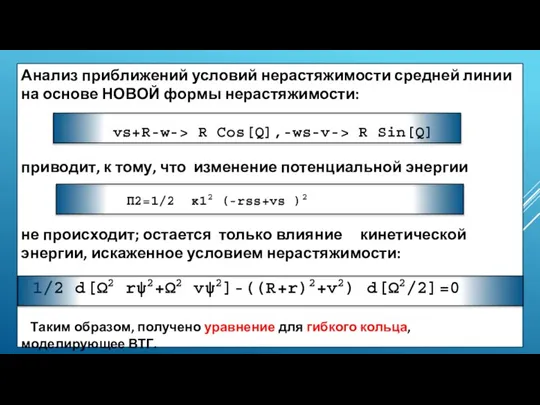
- 17. Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости: vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q]
- 18. Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и в случае когда потенциальной
- 19. Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2]=0 или ((R+r)2+v2) d[Ω2/2]=1/2
- 20. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Картан Э.Д. Интегральные инварианты М.: 1922 г. 2. Суслов Г.К. Теоретическая механика,
- 22. Скачать презентацию
Слайд 2Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Слайд 3Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Слайд 4.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
Слайд 5Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Слайд 6Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не разработана,
Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не разработана,
Слайд 7Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Слайд 8Метод составления уравнений динамики механической системы при наложении различных типов условий на
Метод составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 9Методы составления уравнений динамики механической системы при наложении различных типов условий на
Методы составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 10
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Слайд 11
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Слайд 12НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
Слайд 13
В случае использования интегрального инварианта механики по Картану, введение ограничений на
В случае использования интегрального инварианта механики по Картану, введение ограничений на
Слайд 14Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Слайд 15
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
Слайд 16
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
Слайд 17
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Слайд 18Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Слайд 19Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
![Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/993159/slide-18.jpg)
Слайд 20СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
 Computer modeling of motion of globular clusters in gravitational field
Computer modeling of motion of globular clusters in gravitational field 1a6d7c9333e79136c60205a4f06afadf — копия
1a6d7c9333e79136c60205a4f06afadf — копия Қозғалысты күш мөлшерімен сипаттаудағы алғашқы талпыныстар
Қозғалысты күш мөлшерімен сипаттаудағы алғашқы талпыныстар Тепловые двигатели
Тепловые двигатели рем. техн. обор-ия
рем. техн. обор-ия Электронный задачник по теме Изопроцессы
Электронный задачник по теме Изопроцессы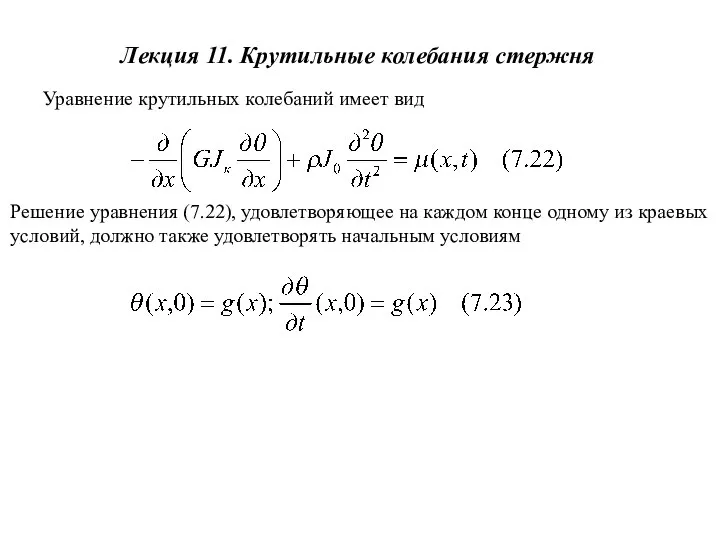 Лекция 11. Крутильные колебания стержня
Лекция 11. Крутильные колебания стержня Электрические явления
Электрические явления Балочные системы
Балочные системы Обобщение пройденного. Подготовка к контрольной работе №1
Обобщение пройденного. Подготовка к контрольной работе №1 Цепные ядерные реакции.
Цепные ядерные реакции. Работа и потенциал электростатического поля. Лекция 2
Работа и потенциал электростатического поля. Лекция 2 Алкадиены. Изометрия алкодиенов
Алкадиены. Изометрия алкодиенов Интерактивная игра по физике Эрудит. Для учащихся 7 класса
Интерактивная игра по физике Эрудит. Для учащихся 7 класса Центр тяжести плоской пластины. Лабораторная работа
Центр тяжести плоской пластины. Лабораторная работа Метод переходного состояния. Классическая теория
Метод переходного состояния. Классическая теория День космонавтики. Двигатели I ступени
День космонавтики. Двигатели I ступени Термометр Галілея
Термометр Галілея Атом станциясы энергетикасын дамыту
Атом станциясы энергетикасын дамыту Презентация на тему Давление света
Презентация на тему Давление света  Открытие нейтрона
Открытие нейтрона Основные законы электрической цепи постоянного тока
Основные законы электрической цепи постоянного тока Динамика материальной точки
Динамика материальной точки Экспериментальный набор для демонстрации принципа работы электродвигателя постоянного тока
Экспериментальный набор для демонстрации принципа работы электродвигателя постоянного тока Урсостидгаза
Урсостидгаза Розв’язування задач. Підготовка до контрольної роботи
Розв’язування задач. Підготовка до контрольної роботи Тема 3-6 Измерители направления ветра с сельсинной передачей
Тема 3-6 Измерители направления ветра с сельсинной передачей Принцип работы 4-х тактного бензинового двигателя
Принцип работы 4-х тактного бензинового двигателя