- Микроподводные движители. Виды микро-движителей

Содержание
- 2. Движитель Движитель — устройство, преобразующее энергию двигателя либо внешнего источника в полезную работу по перемещению транспортного
- 3. Виды микро-движителей Имитирующий гусеницу и червями (движитель – тело робота). «Рыбий хвост» (движитель – тело робота,
- 5. Плюсы использования движителей на основе бионических принципов являются экологически чистыми; обладают высокой эффективностью; имеют малый уровень
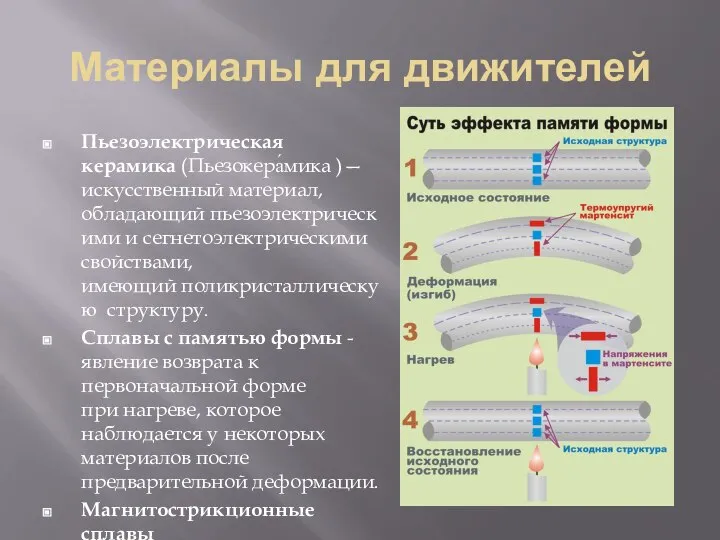
- 6. Материалы для движителей Пьезоэлектрическая керамика (Пьезокера́мика )— искусственный материал, обладающий пьезоэлектрическими и сегнетоэлектрическими свойствами, имеющий поликристаллическую
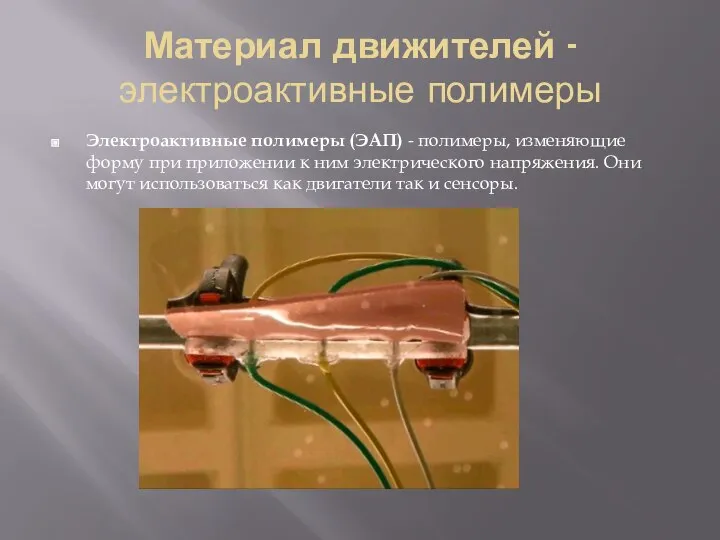
- 7. Материал движителей - электроактивные полимеры Электроактивные полимеры (ЭАП) - полимеры, изменяющие форму при приложении к ним
- 8. Преимущества электроактивных полимеров в качестве искусственных мышц: - движение контролируется электрически; - малый вес; - полностью
- 9. Электроактивные полимеры подразделяются на 2 большие группы: ионные ЭАП и электронные ЭАП, внутри групп имеется более
- 10. К их достоинствам относятся: - большие деформации (20-380%); - умеренные механические напряжения (до нескольких МПа в
- 11. Рис.5 - Актюатор с 4-мя степенями свободы Рuc.4 - Принцип работы актюатора из диэлектрического эластомера
- 12. Микродвижитель «Осьминог» Принцип работы данного микродвижителя построен на подачи давления в пневматические контуры. Источником питания используется
- 13. «Осьминог 2»
- 14. Движитель «рыбий хвост» Микроробот Минога
- 15. Гребной винт Гребно́й винт — наиболее распространённый современный движитель судов, а также конструктивная основа движителей других
- 16. Разновидности винтов Винты с кольцевым крылом вращаются в открытом полом цилиндре (такие винты также известны как
- 18. Скачать презентацию
Слайд 2Движитель
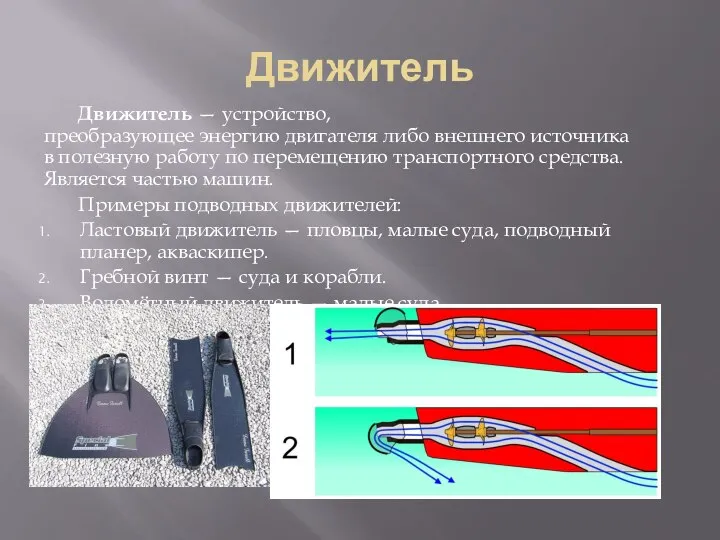
Движитель — устройство, преобразующее энергию двигателя либо внешнего источника в полезную работу по перемещению транспортного средства. Является частью машин.
Примеры
Движитель
Движитель — устройство, преобразующее энергию двигателя либо внешнего источника в полезную работу по перемещению транспортного средства. Является частью машин.
Примеры
Слайд 3Виды микро-движителей
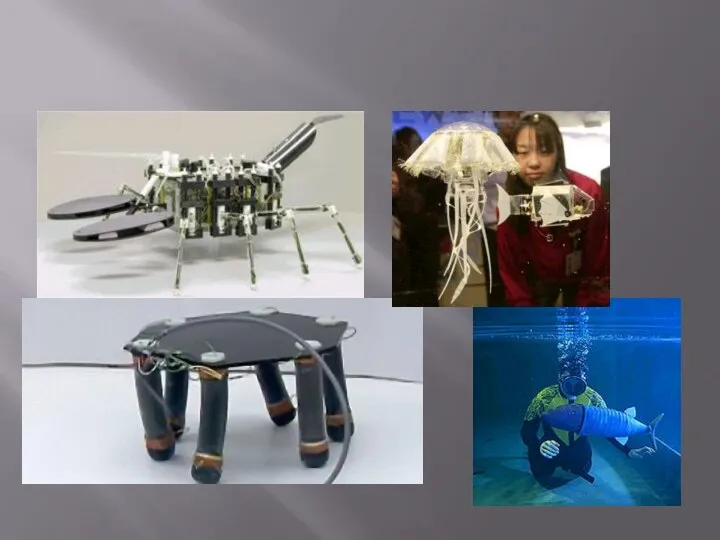
Имитирующий гусеницу и червями (движитель – тело робота).
«Рыбий хвост» (движитель –
Виды микро-движителей
Имитирующий гусеницу и червями (движитель – тело робота).
«Рыбий хвост» (движитель –
Слайд 5Плюсы использования движителей на основе бионических принципов
являются экологически чистыми;
обладают высокой эффективностью;
имеют
Плюсы использования движителей на основе бионических принципов
являются экологически чистыми;
обладают высокой эффективностью;
имеют
Слайд 6Материалы для движителей
Пьезоэлектрическая керамика (Пьезокера́мика )— искусственный материал, обладающий пьезоэлектрическими и сегнетоэлектрическими свойствами, имеющий поликристаллическую структуру.
Сплавы
Материалы для движителей
Пьезоэлектрическая керамика (Пьезокера́мика )— искусственный материал, обладающий пьезоэлектрическими и сегнетоэлектрическими свойствами, имеющий поликристаллическую структуру.
Сплавы
Слайд 7Материал движителей - электроактивные полимеры
Электроактивные полимеры (ЭАП) - полимеры, изменяющие форму при приложении
Материал движителей - электроактивные полимеры
Электроактивные полимеры (ЭАП) - полимеры, изменяющие форму при приложении
Слайд 8Преимущества электроактивных полимеров в качестве искусственных мышц:
- движение контролируется электрически;
- малый вес;
-
Преимущества электроактивных полимеров в качестве искусственных мышц:
- движение контролируется электрически; - малый вес; -
Слайд 9 Электроактивные полимеры подразделяются на 2 большие группы: ионные ЭАП и электронные ЭАП,
Электроактивные полимеры подразделяются на 2 большие группы: ионные ЭАП и электронные ЭАП,
Слайд 10 К их достоинствам относятся:
- большие деформации (20-380%);
- умеренные механические напряжения (до нескольких
К их достоинствам относятся:
- большие деформации (20-380%);
- умеренные механические напряжения (до нескольких
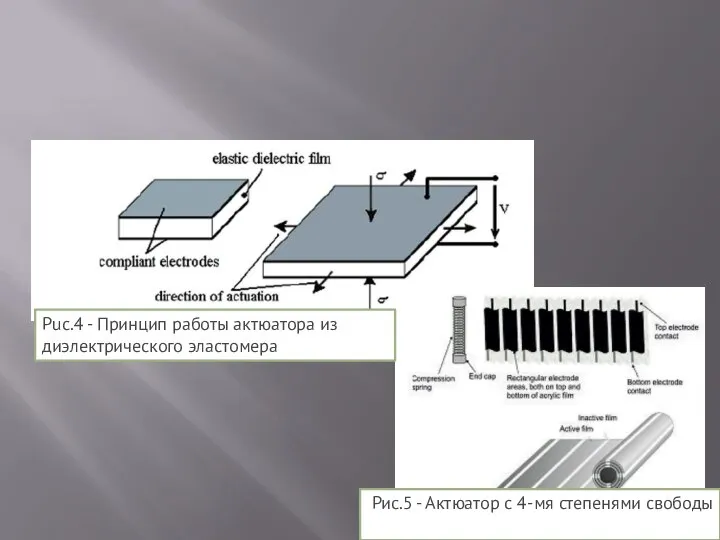
Слайд 11Рис.5 - Актюатор с 4-мя степенями свободы
Рuc.4 - Принцип работы актюатора из
Рис.5 - Актюатор с 4-мя степенями свободы
Рuc.4 - Принцип работы актюатора из
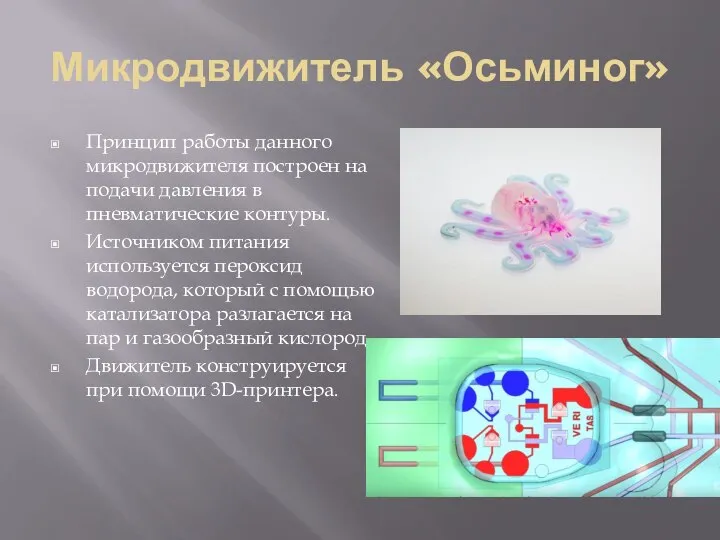
Слайд 12Микродвижитель «Осьминог»
Принцип работы данного микродвижителя построен на подачи давления в пневматические контуры.
Источником
Микродвижитель «Осьминог»
Принцип работы данного микродвижителя построен на подачи давления в пневматические контуры.
Источником
Слайд 13«Осьминог 2»
«Осьминог 2»
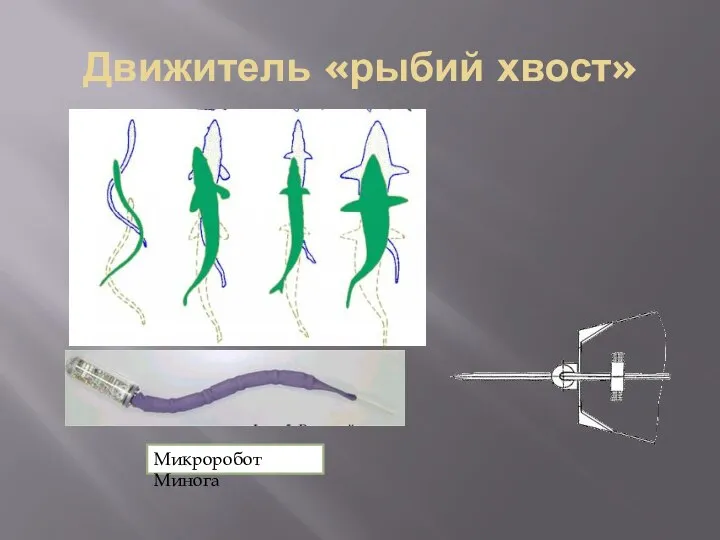
Слайд 14Движитель «рыбий хвост»
Микроробот Минога
Движитель «рыбий хвост»
Микроробот Минога
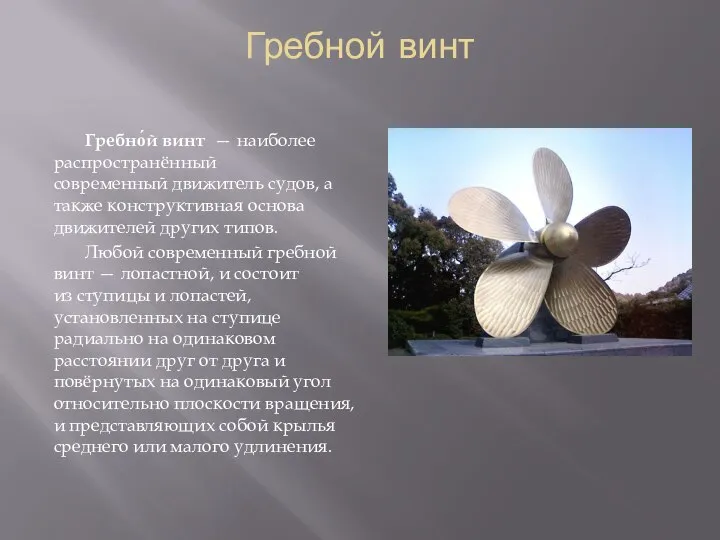
Слайд 15Гребной винт
Гребно́й винт — наиболее распространённый современный движитель судов, а также конструктивная основа движителей других
Гребной винт
Гребно́й винт — наиболее распространённый современный движитель судов, а также конструктивная основа движителей других
Слайд 16Разновидности винтов
Винты с кольцевым крылом вращаются в открытом полом цилиндре (такие винты также известны
Разновидности винтов
Винты с кольцевым крылом вращаются в открытом полом цилиндре (такие винты также известны

 Источники света. Распространение света
Источники света. Распространение света Презентация на тему Атом
Презентация на тему Атом 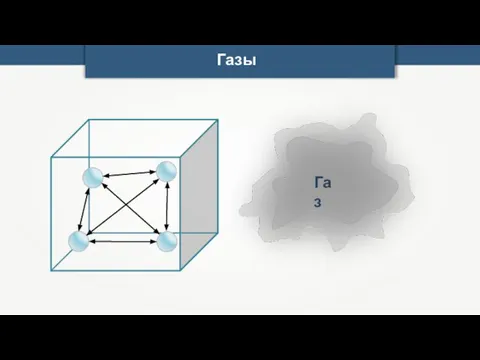 Газы
Газы Проводники и диэлектрики в электростатическом поле
Проводники и диэлектрики в электростатическом поле Сила Ампера
Сила Ампера Электрический ток. Источники тока
Электрический ток. Источники тока Радиация
Радиация Задачи
Задачи Законы постоянного тока
Законы постоянного тока Магнитное поле тока
Магнитное поле тока Ремонт цилиндропоршневой группы
Ремонт цилиндропоршневой группы Отражение света. 8 класс
Отражение света. 8 класс Равновесие твердых тел
Равновесие твердых тел Основные понятия фотометрии
Основные понятия фотометрии Температура и ее измерение
Температура и ее измерение Методы зубонарезания
Методы зубонарезания Решение задач. Силы тяжести, упругости
Решение задач. Силы тяжести, упругости Обработка деталей на оборудовании с ЧПУ
Обработка деталей на оборудовании с ЧПУ Экспериментальные методы исследования элементарных частиц (68)
Экспериментальные методы исследования элементарных частиц (68) Атомная энергетика
Атомная энергетика Оборудование. Тема 1. Введение. Классификация швейных машин
Оборудование. Тема 1. Введение. Классификация швейных машин Сила тока, напряжение, электрический ток
Сила тока, напряжение, электрический ток Электронные эффекты в молекулах органических соединений
Электронные эффекты в молекулах органических соединений Фізика – мистецтво пізнання
Фізика – мистецтво пізнання Центр тяжести тела. Лекция 3
Центр тяжести тела. Лекция 3 Оценка угла места в системах локации метрового диапазона
Оценка угла места в системах локации метрового диапазона Действительные циклы ДВС
Действительные циклы ДВС Выбор электродвигателя и кинематический расчет
Выбор электродвигателя и кинематический расчет