- Обоснование состава и разработка структуры инерциальной навигационной системы легкового автомобиля

Содержание
- 2. Транспортное средство подвергается сопротивлениям, на преодоление которых затрачивается дополнительная энергия Под динамикой автомобиля понимают его свойство
- 3. В состав современного высокоточного навигационного комплекса должна входить автономная система, решающая задачи навигации и ориентации. Наиболее
- 4. Модель ошибок БИНС
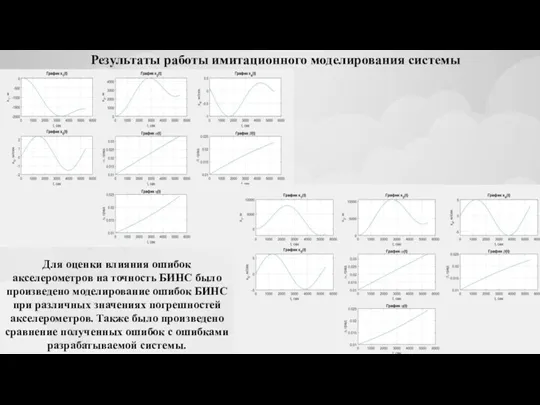
- 5. Для оценки влияния ошибок акселерометров на точность БИНС было произведено моделирование ошибок БИНС при различных значениях
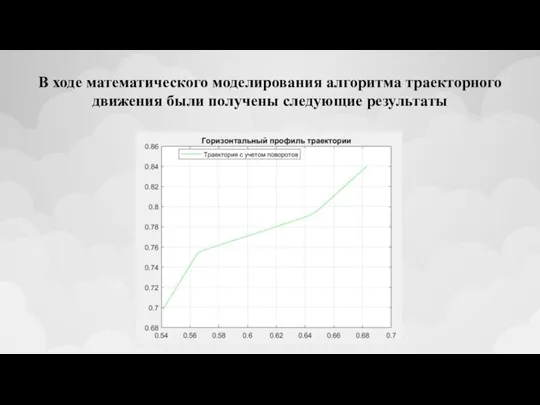
- 6. В ходе математического моделирования алгоритма траекторного движения были получены следующие результаты
- 8. Скачать презентацию
Слайд 2Транспортное средство подвергается сопротивлениям, на преодоление которых затрачивается дополнительная энергия
Под динамикой
Транспортное средство подвергается сопротивлениям, на преодоление которых затрачивается дополнительная энергия
Под динамикой
Слайд 3В состав современного высокоточного навигационного комплекса должна входить автономная система, решающая задачи
В состав современного высокоточного навигационного комплекса должна входить автономная система, решающая задачи
Слайд 4
Модель ошибок БИНС
Модель ошибок БИНС

Слайд 5Для оценки влияния ошибок акселерометров на точность БИНС было произведено моделирование ошибок
Для оценки влияния ошибок акселерометров на точность БИНС было произведено моделирование ошибок
Слайд 6В ходе математического моделирования алгоритма траекторного движения были получены следующие результаты
В ходе математического моделирования алгоритма траекторного движения были получены следующие результаты
 Технологический процесс монтажа устройства для формовки протектора
Технологический процесс монтажа устройства для формовки протектора Презентация на тему Физика в спорте
Презентация на тему Физика в спорте  Удивительный транспорт
Удивительный транспорт Ударная вязкость. Определение ударной вязкости
Ударная вязкость. Определение ударной вязкости Виды движения по форме траектории
Виды движения по форме траектории Сверхпроводимость. Эффект Мейсснера
Сверхпроводимость. Эффект Мейсснера Динамическая метеорология. Термический ветер
Динамическая метеорология. Термический ветер Тепловые явления
Тепловые явления Презентация на тему Движение тел по наклонной плоскости
Презентация на тему Движение тел по наклонной плоскости  Принцип работы 4-х тактного дизельного двигателя
Принцип работы 4-х тактного дизельного двигателя Презентация на тему Теплопередача и ее виды
Презентация на тему Теплопередача и ее виды  Работа и мощность тока
Работа и мощность тока Sondertraining Service Technik Технические инновации. Общая информация
Sondertraining Service Technik Технические инновации. Общая информация Формирование экспериментального метода решения задач на уроках физики
Формирование экспериментального метода решения задач на уроках физики ВСР №20. Голография и ее применение
ВСР №20. Голография и ее применение Телескоп-рефрактор
Телескоп-рефрактор Электрические цепи переменного тока
Электрические цепи переменного тока Обзор экспериментальных исследований работы моделей фундаментов на песчаном основании
Обзор экспериментальных исследований работы моделей фундаментов на песчаном основании Тепловые двигатели
Тепловые двигатели Расчет производительности экструдеров
Расчет производительности экструдеров Техническая эксплуатация автомобиля Камаз 4310 ремонт сцепления автомобиля Камаз 4310
Техническая эксплуатация автомобиля Камаз 4310 ремонт сцепления автомобиля Камаз 4310 Средства радиосвязи. Тема 2
Средства радиосвязи. Тема 2 Физика для химиков. День первый - термодинамика
Физика для химиков. День первый - термодинамика Микромир элементарных частиц
Микромир элементарных частиц Изучение физических свойств кристаллов из NaCl и CuSO4
Изучение физических свойств кристаллов из NaCl и CuSO4 Основные вопросы, рассматриваемые в рамках занятий модуля № 23
Основные вопросы, рассматриваемые в рамках занятий модуля № 23 Виды излучения. Спектры. Спектральный анализ
Виды излучения. Спектры. Спектральный анализ Плазма и ионизирующие излучения в атомной и космической промышленности. Тема 1
Плазма и ионизирующие излучения в атомной и космической промышленности. Тема 1