- Определение числа звеньев и кинематических пар

Содержание
- 2. Условие
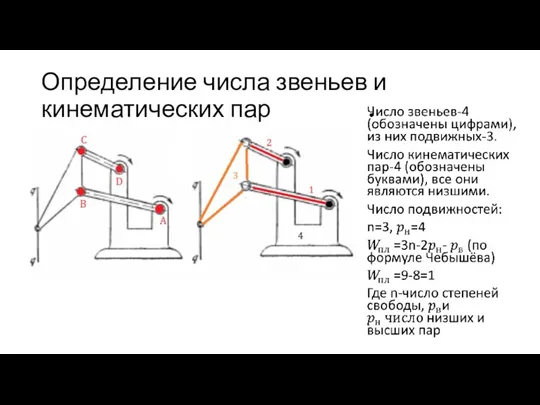
- 3. Определение числа звеньев и кинематических пар
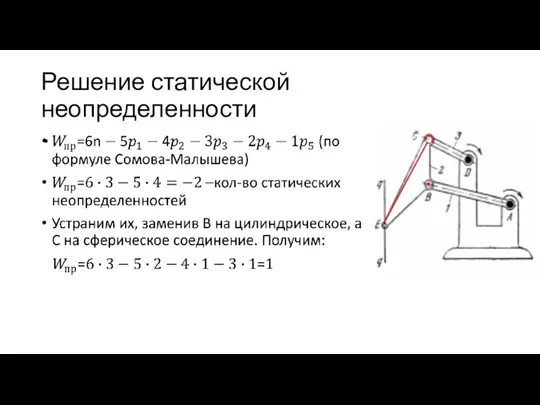
- 4. Решение статической неопределенности
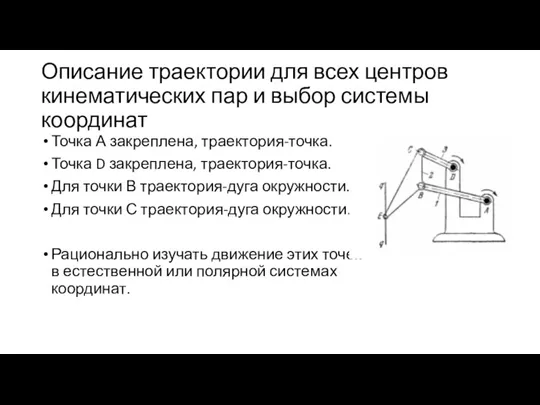
- 5. Описание траектории для всех центров кинематических пар и выбор системы координат Точка А закреплена, траектория-точка. Точка
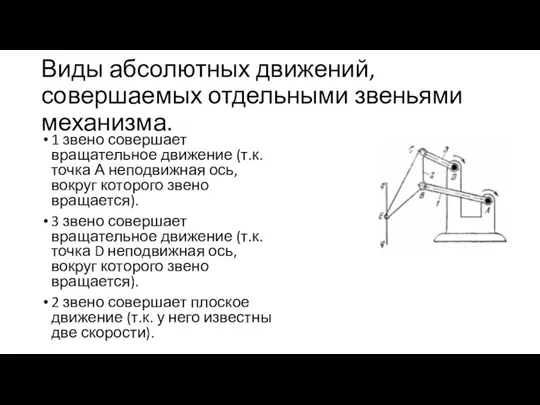
- 6. Виды абсолютных движений, совершаемых отдельными звеньями механизма. 1 звено совершает вращательное движение (т.к. точка А неподвижная
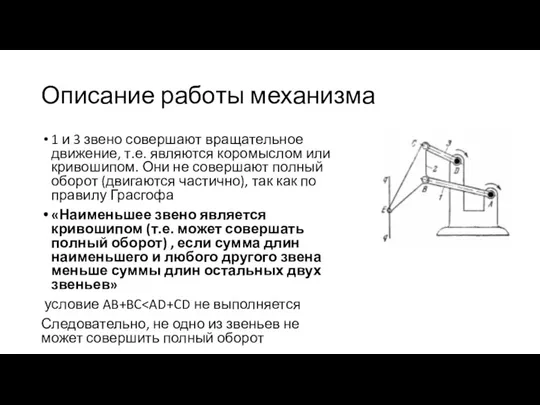
- 7. Описание работы механизма 1 и 3 звено совершают вращательное движение, т.е. являются коромыслом или кривошипом. Они
- 9. Скачать презентацию
Слайд 3Определение числа звеньев и кинематических пар
Определение числа звеньев и кинематических пар
Слайд 4Решение статической неопределенности
Решение статической неопределенности
Слайд 5Описание траектории для всех центров кинематических пар и выбор системы координат
Точка
Описание траектории для всех центров кинематических пар и выбор системы координат
Точка
Слайд 6Виды абсолютных движений, совершаемых отдельными звеньями механизма.
1 звено совершает вращательное движение (т.к.
Виды абсолютных движений, совершаемых отдельными звеньями механизма.
1 звено совершает вращательное движение (т.к.
Слайд 7Описание работы механизма
1 и 3 звено совершают вращательное движение, т.е. являются коромыслом
Описание работы механизма
1 и 3 звено совершают вращательное движение, т.е. являются коромыслом
 11_ ОТС_ Модуляция и демодуляция 14
11_ ОТС_ Модуляция и демодуляция 14 Способы увеличения подачи воздуха и топлива в цилиндры двигателя внутреннего сгорания (ДВС)
Способы увеличения подачи воздуха и топлива в цилиндры двигателя внутреннего сгорания (ДВС) Назначение, устройство и работа сцепления автомобиля КамАЗ 5320 его привод и пневмогидроусилитель
Назначение, устройство и работа сцепления автомобиля КамАЗ 5320 его привод и пневмогидроусилитель lek2 _кинем
lek2 _кинем Безопасность дорожного движения и особенности управления грузовым автомобилем
Безопасность дорожного движения и особенности управления грузовым автомобилем Звуки природы и звуки космоса. Что их объединяет
Звуки природы и звуки космоса. Что их объединяет Пьер Кюри (1859-1906) и Мария Склодовская-Кюри (1867-1934)
Пьер Кюри (1859-1906) и Мария Склодовская-Кюри (1867-1934) Первый закон термодинамики
Первый закон термодинамики Аварийная остойчивость. Спрямление судна
Аварийная остойчивость. Спрямление судна Транспортные, транспортирующие и погрузочно-разгрузочные машины. Тема 2
Транспортные, транспортирующие и погрузочно-разгрузочные машины. Тема 2 Решение задач по теме Закон Ома. Сопротивление
Решение задач по теме Закон Ома. Сопротивление Презентация на тему Строение и свойства вещества
Презентация на тему Строение и свойства вещества  Презентация на тему Классификация элементарных частиц
Презентация на тему Классификация элементарных частиц 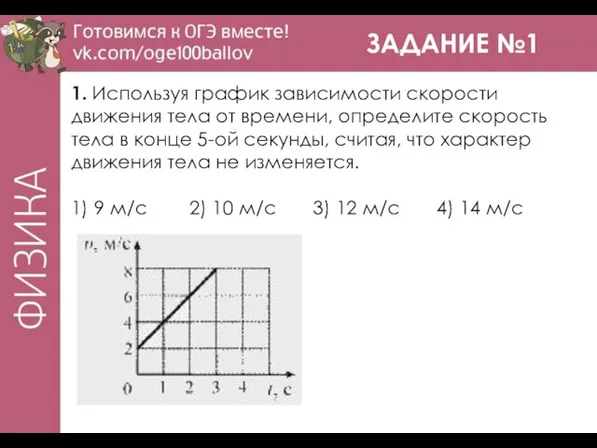 Готовимся к ОГЭ по физике
Готовимся к ОГЭ по физике Постройка радиоуправляемой пилотажной модели самолета
Постройка радиоуправляемой пилотажной модели самолета Подготовка машины к работе
Подготовка машины к работе Электрическое поле. Тема 1.1.1
Электрическое поле. Тема 1.1.1 Механические колебания. Колебательные движения
Механические колебания. Колебательные движения Магнетизм. Переменный ток. (Лекция 5)
Магнетизм. Переменный ток. (Лекция 5) Презентация на тему Закон Ома для участка цепи
Презентация на тему Закон Ома для участка цепи  Возможна ли машина времени
Возможна ли машина времени Стартовый ускоритель
Стартовый ускоритель Генераторы переменного тока промышленной частоты
Генераторы переменного тока промышленной частоты Строительная акустика. Лекция 2. Тезисы
Строительная акустика. Лекция 2. Тезисы Кинематика
Кинематика Презентация на тему Равнодействующая сила
Презентация на тему Равнодействующая сила  Агрегатные состояния вещества. Различие в молекулярном строении твердых тел, жидкостей и газов (7 класс)
Агрегатные состояния вещества. Различие в молекулярном строении твердых тел, жидкостей и газов (7 класс) Модель с силами сцепления у вершины трещины. Модель Дагдейла
Модель с силами сцепления у вершины трещины. Модель Дагдейла