- Определение показателей маневренности при проведении испытаний. Лабораторная работа

Содержание
- 2. НОРМАТИВНЫЕ ДОКУМЕНТЫ ГОСТ 27257-87 (ИСО 7457-83) Машины землеройные. Методы определения параметров поворота колесных машин. ГОСТ Р
- 3. ЦЕЛЬ РАБОТЫ Изучение теоретических и экспериментальных методов определения показателей маневренности дорожно-строительных машин путем определения минимальных радиусов
- 4. ЗАДАЧИ РАБОТЫ Определить показатели маневренности машины теоретическим и экспериментальным методами; Построить испытательные коридоры для машин, предназначенных
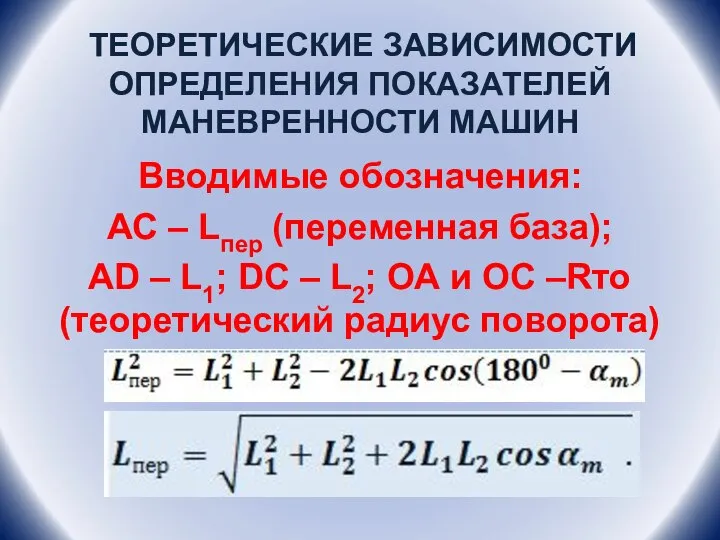
- 6. ТЕОРЕТИЧЕСКИЕ ЗАВИСИМОСТИ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЕЙ МАНЕВРЕННОСТИ МАШИН Вводимые обозначения: АС – Lпер (переменная база); АD – L1;
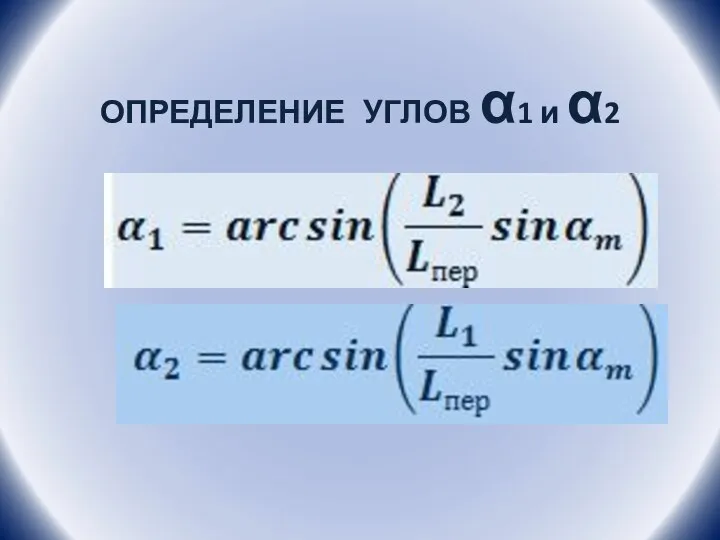
- 7. ОПРЕДЕЛЕНИЕ УГЛОВ α1 и α2
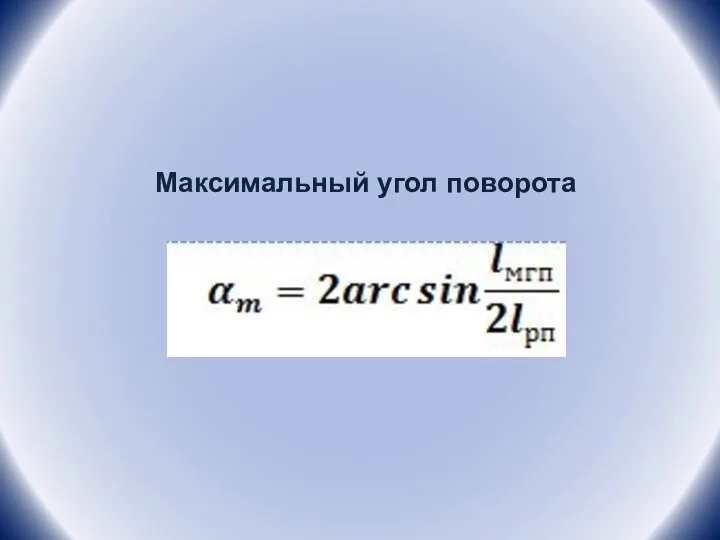
- 8. Максимальный угол поворота
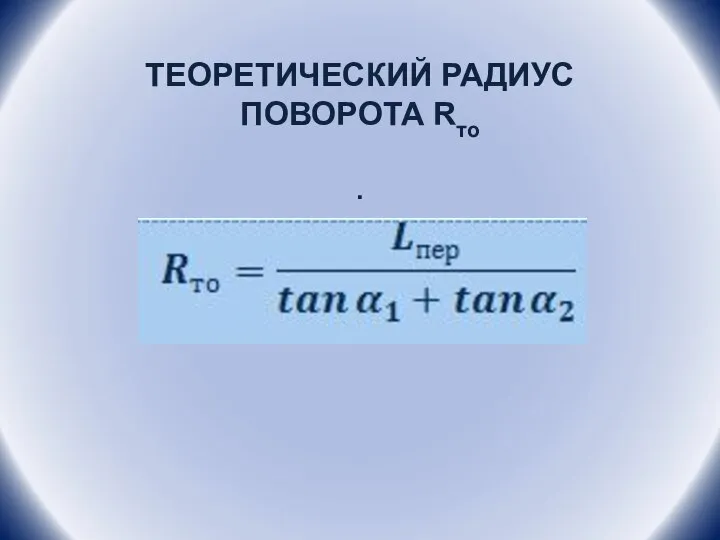
- 9. ТЕОРЕТИЧЕСКИЙ РАДИУС ПОВОРОТА Rто .
- 10. ТЕОРЕТИЧЕСКИЙ МИНИМАЛЬНЫЙ РАДИУС ПОВОРОТА RТmin
- 11. ТЕОРЕТИЧЕСКИЙ ВНЕШНИЙ ГАБАРИТНЫЙ РАДИУС ПОВОРОТА RТГmax
- 12. ТЕОРЕТИЧЕСКИЙ ВНУТРЕННИЙ ГАБАРИТНЫЙ РАДИУС ПОВОРОТА Rтгmin
- 13. ТЕОРЕТИЧЕСКАЯ ПОВОРОТНАЯ ШИРИНА МАШИНЫ ПО СЛЕДУ КОЛЕС ВТП
- 14. ТЕОРЕТИЧЕСКАЯ ГАБАРИТНАЯ ПОЛОСА ДВИЖЕНИЯ ВТГ
- 15. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ МАНЕВРЕННОСТИ МАШИН . В качестве экспериментального образца выбран фронтальный колесный погрузчик с шарнирно-сочлененной
- 16. Схема определения экспериментальных показателей маневренности
- 17. ЗАМЕРЯЕМЫЕ ПАРАМЕТРЫ Rоmin - опытное значение минимального радиуса поворота внешнего колеса (гусеницы) по внешнему следу, м;
- 18. Минимальный экспериментальный радиус поворота (Rдmin) .
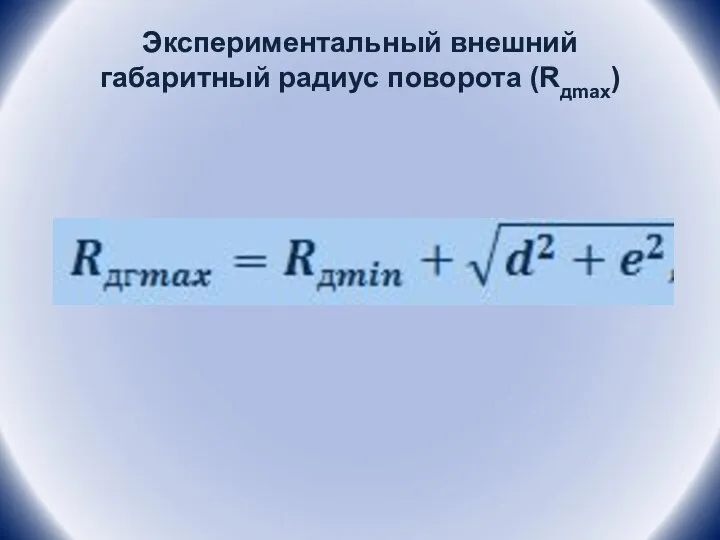
- 19. Экспериментальный внешний габаритный радиус поворота (Rдmax)
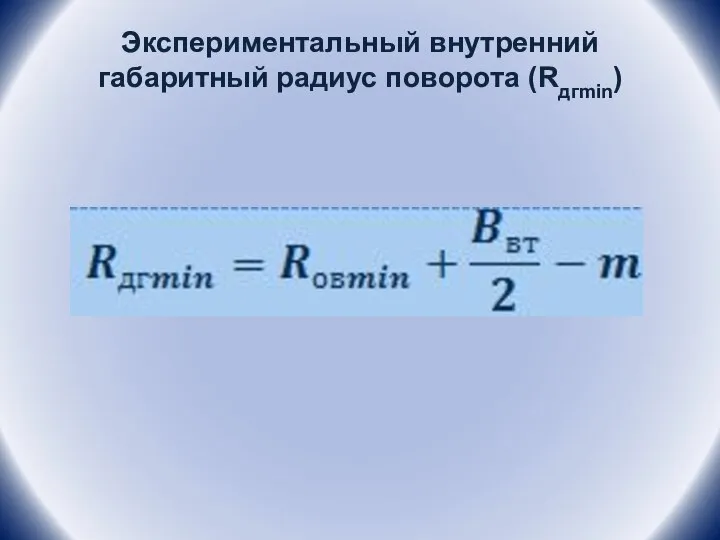
- 20. Экспериментальный внутренний габаритный радиус поворота (Rдгmin)
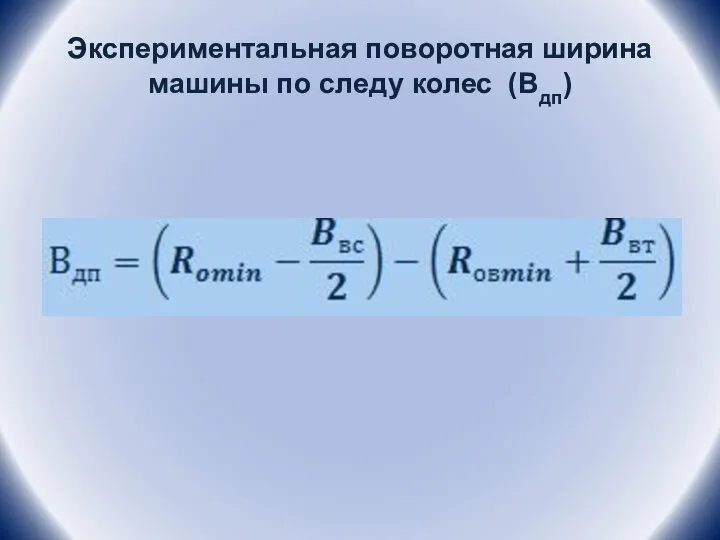
- 21. Экспериментальная поворотная ширина машины по следу колес (Вдп)
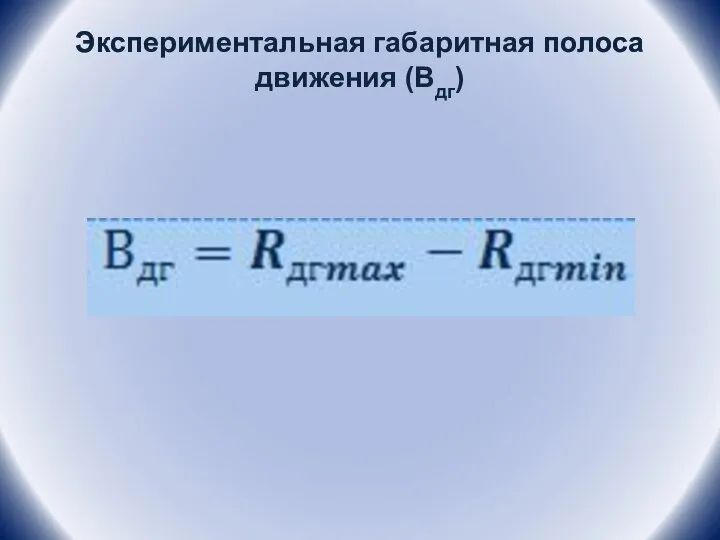
- 22. Экспериментальная габаритная полоса движения (Вдг)
- 23. ИСПЫТАТЕЛЬНЫЕ КОРИДОРЫ ГОСТ Р ИСО 5010-2010 Испытания систем рулевого управления проводятся в коридорах, имеющих ровную поверхность
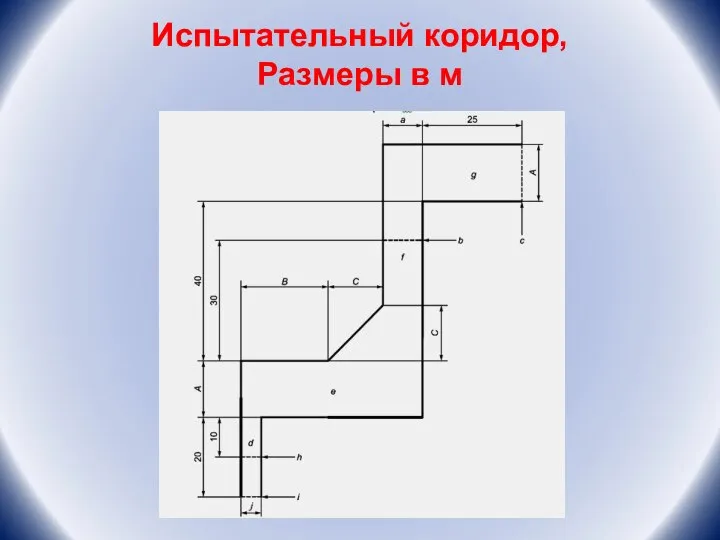
- 24. Испытательный коридор, Размеры в м
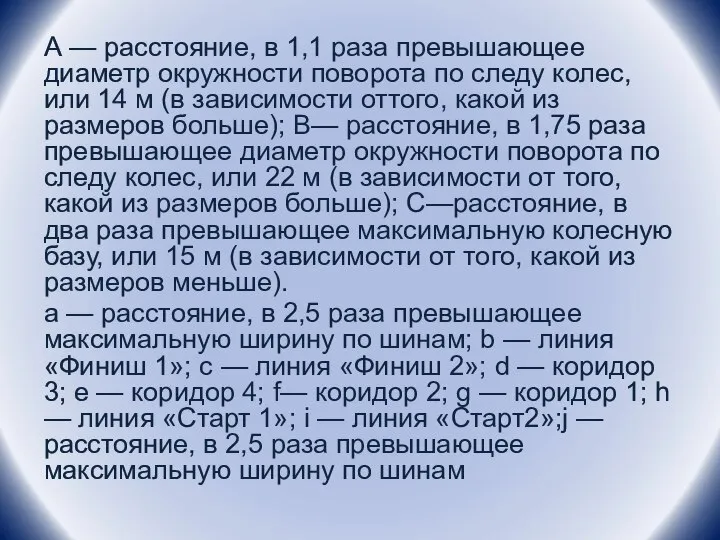
- 25. А — расстояние, в 1,1 раза превышающее диаметр окружности поворота по следу колес, или 14 м
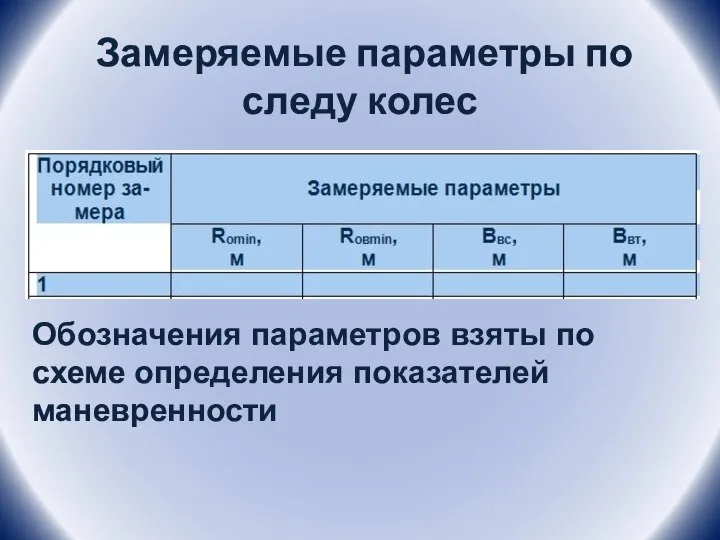
- 26. Замеряемые параметры по следу колес Обозначения параметров взяты по схеме определения показателей маневренности
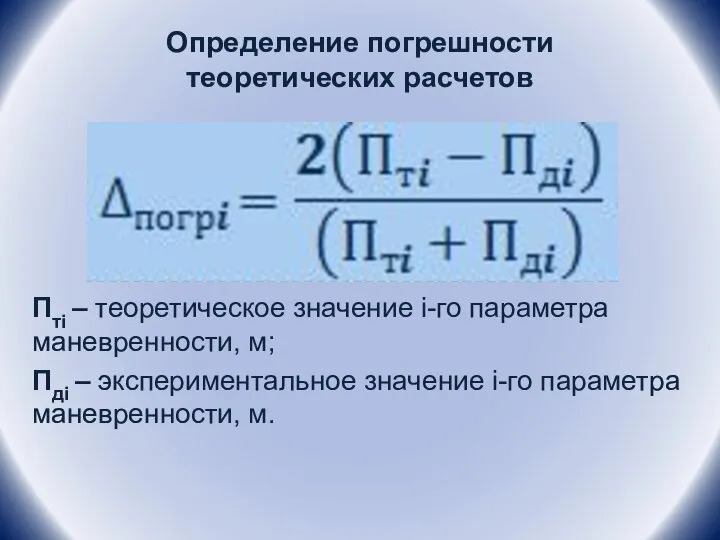
- 27. Определение погрешности теоретических расчетов Птi – теоретическое значение i-го параметра маневренности, м; Пдi – экспериментальное значение
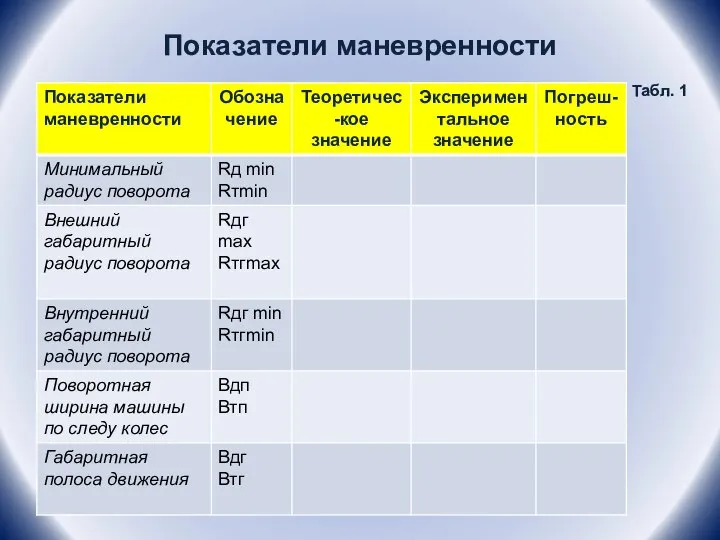
- 28. Показатели маневренности . Табл. 1
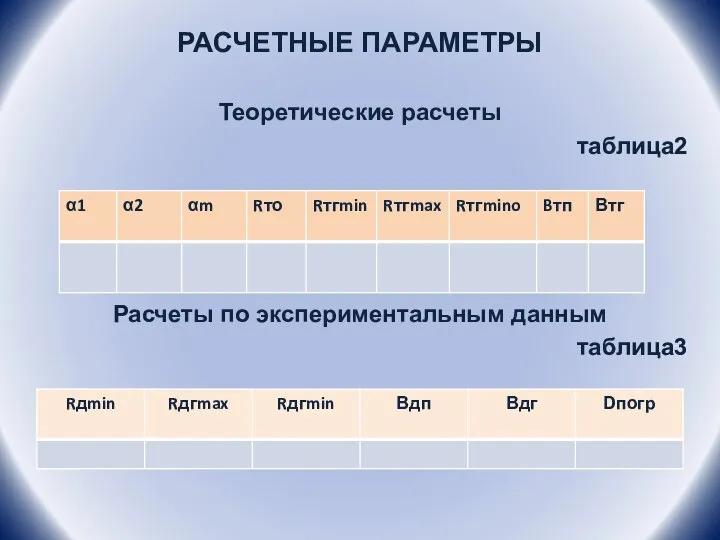
- 29. РАСЧЕТНЫЕ ПАРАМЕТРЫ Теоретические расчеты таблица2 Расчеты по экспериментальным данным таблица3
- 30. ИСХОДНЫЕ ДАННЫЕ таблица4
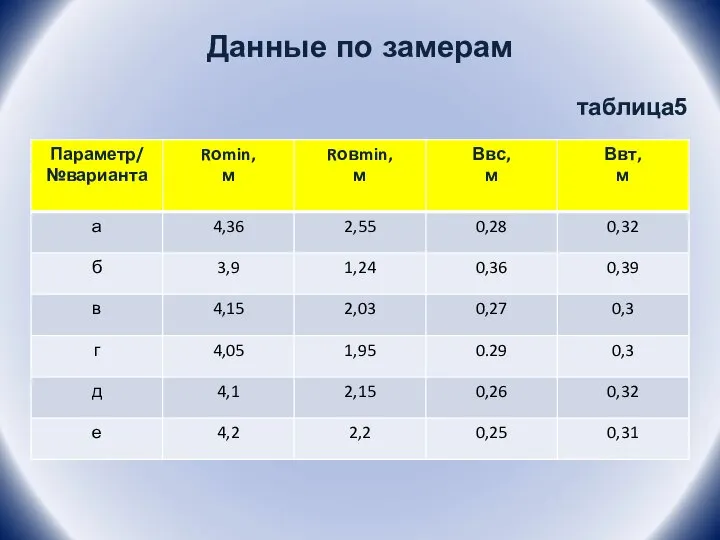
- 31. Данные по замерам таблица5
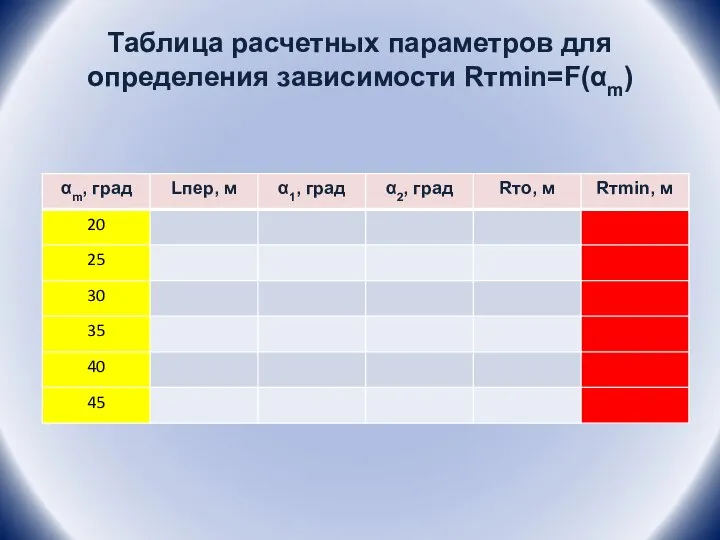
- 32. Таблица расчетных параметров для определения зависимости Rтmin=F(αm)
- 33. В работе требуется : Определить теоретические и экспериментальные значения параметров маневренности; Заполнить таблицы №№1, 2, 3;
- 34. Литература Рубайлов, А.В., Методические указания по определению показателей маневренности при проведении сертификации ДСМ по курсу «Основы
- 36. Скачать презентацию
Слайд 2НОРМАТИВНЫЕ ДОКУМЕНТЫ
ГОСТ 27257-87 (ИСО 7457-83) Машины землеройные. Методы определения параметров поворота колесных
НОРМАТИВНЫЕ ДОКУМЕНТЫ
ГОСТ 27257-87 (ИСО 7457-83) Машины землеройные. Методы определения параметров поворота колесных
Слайд 3ЦЕЛЬ РАБОТЫ
Изучение теоретических и экспериментальных методов определения показателей маневренности дорожно-строительных машин путем
ЦЕЛЬ РАБОТЫ
Изучение теоретических и экспериментальных методов определения показателей маневренности дорожно-строительных машин путем
Слайд 4
ЗАДАЧИ РАБОТЫ
Определить показатели маневренности машины теоретическим и экспериментальным методами;
Построить
ЗАДАЧИ РАБОТЫ
Определить показатели маневренности машины теоретическим и экспериментальным методами;
Построить
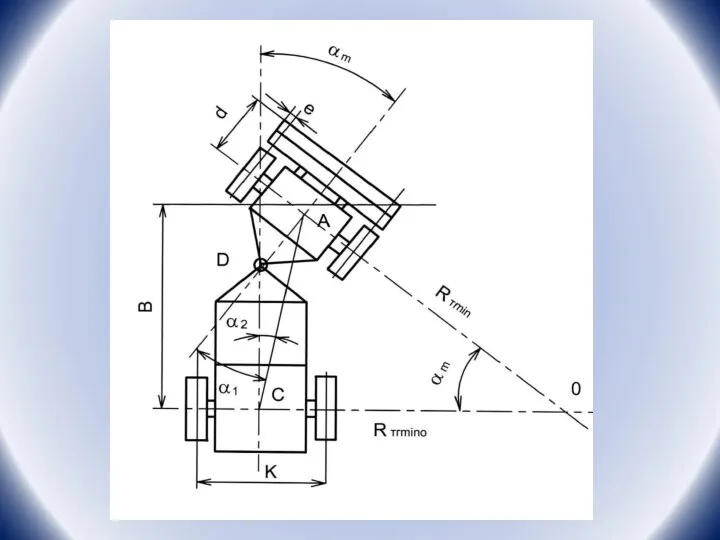
Слайд 6 ТЕОРЕТИЧЕСКИЕ ЗАВИСИМОСТИ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЕЙ МАНЕВРЕННОСТИ МАШИН
Вводимые обозначения:
АС – Lпер (переменная база);
АD
ТЕОРЕТИЧЕСКИЕ ЗАВИСИМОСТИ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЕЙ МАНЕВРЕННОСТИ МАШИН
Вводимые обозначения:
АС – Lпер (переменная база);
АD
Слайд 7
ОПРЕДЕЛЕНИЕ УГЛОВ α1 и α2
ОПРЕДЕЛЕНИЕ УГЛОВ α1 и α2
Слайд 8Максимальный угол поворота
Слайд 9
ТЕОРЕТИЧЕСКИЙ РАДИУС ПОВОРОТА Rто
.
ТЕОРЕТИЧЕСКИЙ РАДИУС ПОВОРОТА Rто
.
Слайд 10 ТЕОРЕТИЧЕСКИЙ МИНИМАЛЬНЫЙ РАДИУС ПОВОРОТА RТmin
ТЕОРЕТИЧЕСКИЙ МИНИМАЛЬНЫЙ РАДИУС ПОВОРОТА RТmin
Слайд 11
ТЕОРЕТИЧЕСКИЙ ВНЕШНИЙ ГАБАРИТНЫЙ РАДИУС ПОВОРОТА
RТГmax
ТЕОРЕТИЧЕСКИЙ ВНЕШНИЙ ГАБАРИТНЫЙ РАДИУС ПОВОРОТА
RТГmax
Слайд 12ТЕОРЕТИЧЕСКИЙ ВНУТРЕННИЙ ГАБАРИТНЫЙ РАДИУС ПОВОРОТА Rтгmin
ТЕОРЕТИЧЕСКИЙ ВНУТРЕННИЙ ГАБАРИТНЫЙ РАДИУС ПОВОРОТА Rтгmin
Слайд 13
ТЕОРЕТИЧЕСКАЯ ПОВОРОТНАЯ ШИРИНА МАШИНЫ ПО СЛЕДУ КОЛЕС ВТП
ТЕОРЕТИЧЕСКАЯ ПОВОРОТНАЯ ШИРИНА МАШИНЫ ПО СЛЕДУ КОЛЕС ВТП
Слайд 14
ТЕОРЕТИЧЕСКАЯ ГАБАРИТНАЯ ПОЛОСА ДВИЖЕНИЯ ВТГ
ТЕОРЕТИЧЕСКАЯ ГАБАРИТНАЯ ПОЛОСА ДВИЖЕНИЯ ВТГ
Слайд 15
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ
МАНЕВРЕННОСТИ МАШИН
.
В качестве экспериментального образца выбран фронтальный колесный погрузчик
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ
МАНЕВРЕННОСТИ МАШИН
.
В качестве экспериментального образца выбран фронтальный колесный погрузчик
Слайд 16Схема определения экспериментальных
показателей маневренности
Схема определения экспериментальных
показателей маневренности

Слайд 17
ЗАМЕРЯЕМЫЕ ПАРАМЕТРЫ
Rоmin - опытное значение минимального радиуса поворота внешнего колеса (гусеницы) по
ЗАМЕРЯЕМЫЕ ПАРАМЕТРЫ
Rоmin - опытное значение минимального радиуса поворота внешнего колеса (гусеницы) по
Слайд 18Минимальный экспериментальный радиус поворота (Rдmin)
.
Минимальный экспериментальный радиус поворота (Rдmin)
.
Слайд 19Экспериментальный внешний габаритный радиус поворота (Rдmax)
Экспериментальный внешний габаритный радиус поворота (Rдmax)
Слайд 20Экспериментальный внутренний габаритный радиус поворота (Rдгmin)
Экспериментальный внутренний габаритный радиус поворота (Rдгmin)
Слайд 21
Экспериментальная поворотная ширина машины по следу колес (Вдп)
Экспериментальная поворотная ширина машины по следу колес (Вдп)
Слайд 22Экспериментальная габаритная полоса движения (Вдг)
Экспериментальная габаритная полоса движения (Вдг)
Слайд 23
ИСПЫТАТЕЛЬНЫЕ КОРИДОРЫ
ГОСТ Р ИСО 5010-2010
Испытания систем рулевого управления проводятся в
ИСПЫТАТЕЛЬНЫЕ КОРИДОРЫ
ГОСТ Р ИСО 5010-2010
Испытания систем рулевого управления проводятся в
Слайд 24
Испытательный коридор,
Размеры в м
Испытательный коридор,
Размеры в м
Слайд 25А — расстояние, в 1,1 раза превышающее диаметр окружности поворота по следу
А — расстояние, в 1,1 раза превышающее диаметр окружности поворота по следу
Слайд 26
Замеряемые параметры по следу колес
Обозначения параметров взяты по схеме определения показателей
Замеряемые параметры по следу колес
Обозначения параметров взяты по схеме определения показателей
Слайд 27Определение погрешности теоретических расчетов
Птi – теоретическое значение i-го параметра маневренности, м;
Пдi
Определение погрешности теоретических расчетов
Птi – теоретическое значение i-го параметра маневренности, м;
Пдi
Слайд 28
Показатели маневренности
.
Табл. 1
Показатели маневренности
.
Табл. 1
Слайд 29
РАСЧЕТНЫЕ ПАРАМЕТРЫ
Теоретические расчеты
таблица2
Расчеты по экспериментальным данным
таблица3
РАСЧЕТНЫЕ ПАРАМЕТРЫ
Теоретические расчеты
таблица2
Расчеты по экспериментальным данным
таблица3
Слайд 30
ИСХОДНЫЕ ДАННЫЕ
таблица4
ИСХОДНЫЕ ДАННЫЕ
таблица4

Слайд 31Данные по замерам
таблица5
Данные по замерам
таблица5
Слайд 32Таблица расчетных параметров для определения зависимости Rтmin=F(αm)
Таблица расчетных параметров для определения зависимости Rтmin=F(αm)
Слайд 33В работе требуется :
Определить теоретические и экспериментальные значения параметров маневренности;
Заполнить
В работе требуется :
Определить теоретические и экспериментальные значения параметров маневренности;
Заполнить
Слайд 34Литература
Рубайлов, А.В., Методические указания по определению показателей маневренности при проведении сертификации ДСМ
Литература
Рубайлов, А.В., Методические указания по определению показателей маневренности при проведении сертификации ДСМ
 1f712686a0a73c13b3172265a60c76b1
1f712686a0a73c13b3172265a60c76b1 Движение и взаимодействие тел. 7 класс
Движение и взаимодействие тел. 7 класс Электростатика. Заря́д
Электростатика. Заря́д Симметрия молекулярных систем
Симметрия молекулярных систем Раздел механики кинематика
Раздел механики кинематика Проводники и диэлектрики
Проводники и диэлектрики Элементы релятивистской механики (продолжение). Лекция № 9
Элементы релятивистской механики (продолжение). Лекция № 9 Тест Поверхностное натяжение
Тест Поверхностное натяжение Теорема Гаусса и её применение к расчету электрических полей. Лекция 14
Теорема Гаусса и её применение к расчету электрических полей. Лекция 14 Презентация 2исправл -2019-20 [Автосохраненный]
Презентация 2исправл -2019-20 [Автосохраненный] Svobodnoe_padenie (1)
Svobodnoe_padenie (1) Презентация на тему Влажность воздуха (8 класс)
Презентация на тему Влажность воздуха (8 класс)  Электрический ток. Источники электрического тока
Электрический ток. Источники электрического тока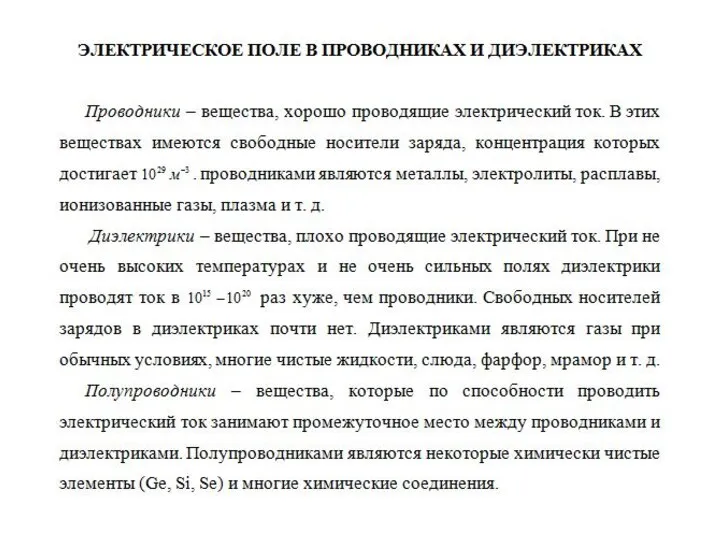 Электрическое поле в проводах и диэлектриках
Электрическое поле в проводах и диэлектриках Построение зубчатого зацепления вручную карандашом
Построение зубчатого зацепления вручную карандашом Примесные полупроводники
Примесные полупроводники Решение задач по теме Закон Кулона
Решение задач по теме Закон Кулона Билингвальный профориентационный проект. АтомГлосс. Удомля, школа №5. Атомный космос
Билингвальный профориентационный проект. АтомГлосс. Удомля, школа №5. Атомный космос Равномерность хода двигателя. Лекция №5б
Равномерность хода двигателя. Лекция №5б Вес тела
Вес тела Электромагнитные колебания. Колебательный контур. Превращения энергии в колебательном контуре
Электромагнитные колебания. Колебательный контур. Превращения энергии в колебательном контуре Оптические приборы
Оптические приборы Гидростатическое давление в точке (тема 1)
Гидростатическое давление в точке (тема 1) Геометрическая оптика. Свет. Источники света
Геометрическая оптика. Свет. Источники света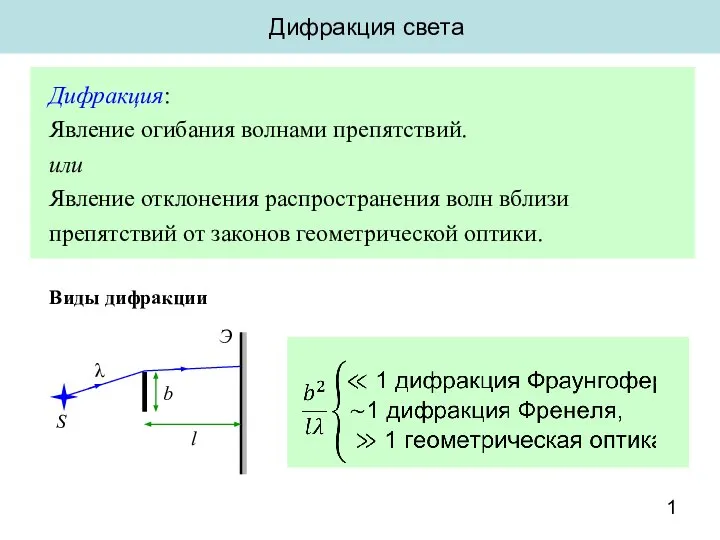 Дифракция света
Дифракция света Неравномерное движение. Мгновенная скорость
Неравномерное движение. Мгновенная скорость Урок 7
Урок 7 8__2_zakon_Nyutona
8__2_zakon_Nyutona