- Определение уравнения движения. Общий случай интегрального уравнения

Содержание
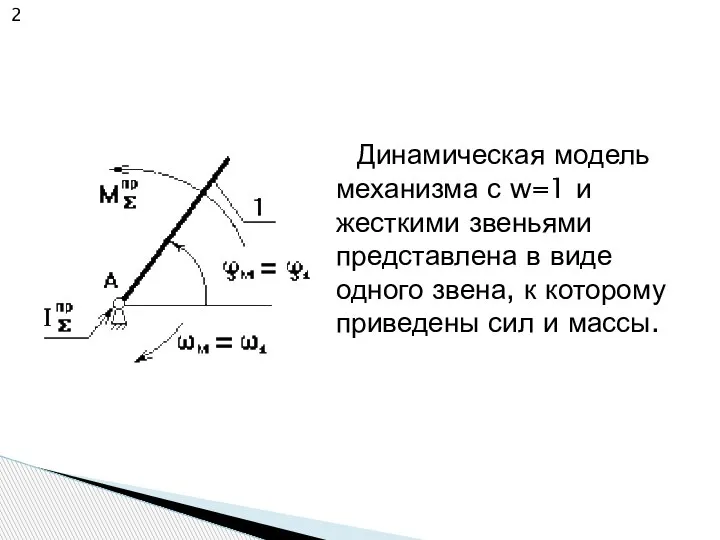
- 2. Динамическая модель механизма с w=1 и жесткими звеньями представлена в виде одного звена, к которому приведены
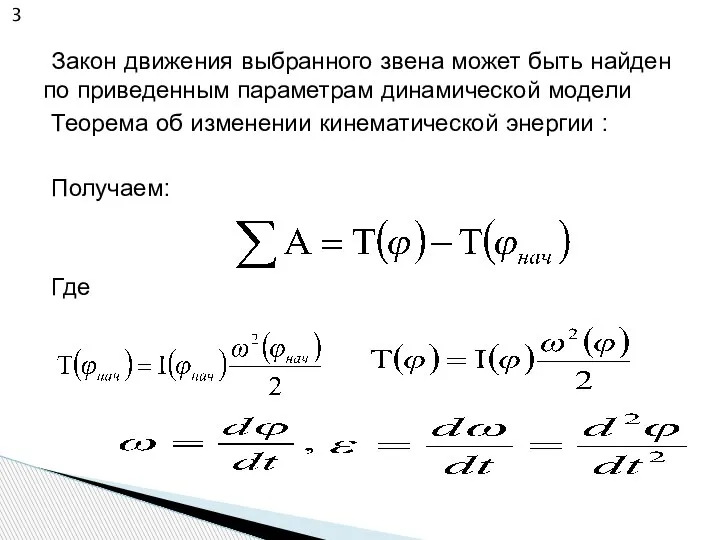
- 3. Закон движения выбранного звена может быть найден по приведенным параметрам динамической модели Теорема об изменении кинематической
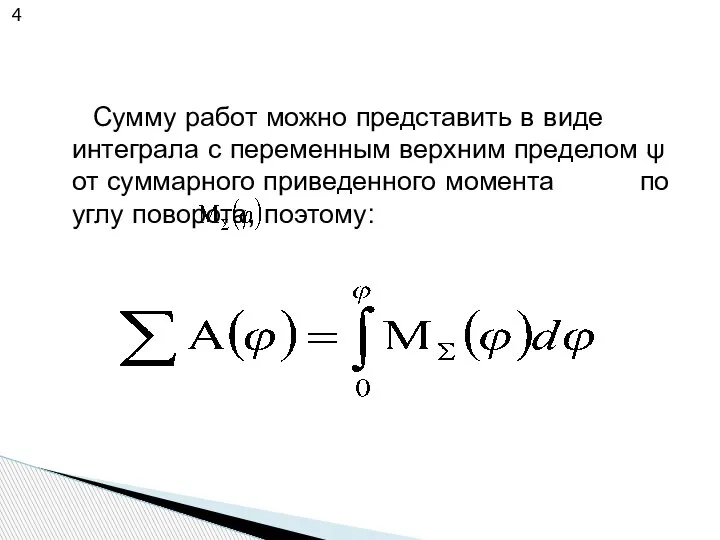
- 4. Сумму работ можно представить в виде интеграла с переменным верхним пределом ψ от суммарного приведенного момента
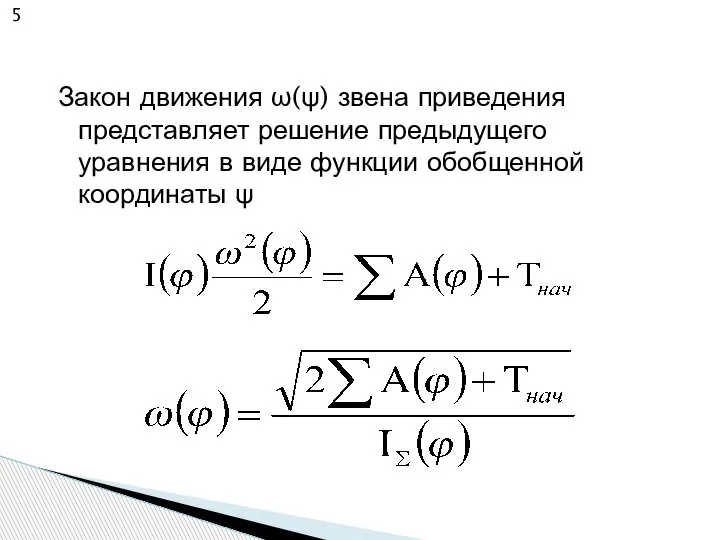
- 5. Закон движения ω(ψ) звена приведения представляет решение предыдущего уравнения в виде функции обобщенной координаты ψ
- 6. Продифференцировав выражение суммы работ по координате ψ, получим дифференциальное уравнение движения:
- 7. Учитывая, что , получаем дифференцированием угловое ускорение звена приведения
- 8. МА можно представить как одно звено с переменным моментом инерции, в общем случае зависящим от обобщенной
- 9. Свяжем расчетные значения ψ со временем. Проинтегрируем и получим: При:
- 10. Определение соответствующих моментов времени движения связано с интегрированием обратной функции Вывод
- 12. Скачать презентацию
Слайд 3Закон движения выбранного звена может быть найден по приведенным параметрам динамической модели
Теорема
Закон движения выбранного звена может быть найден по приведенным параметрам динамической модели
Теорема
Слайд 4Сумму работ можно представить в виде интеграла с переменным верхним пределом ψ
Сумму работ можно представить в виде интеграла с переменным верхним пределом ψ
Слайд 5Закон движения ω(ψ) звена приведения представляет решение предыдущего уравнения в виде функции
Закон движения ω(ψ) звена приведения представляет решение предыдущего уравнения в виде функции
Слайд 6Продифференцировав выражение суммы работ по координате ψ, получим дифференциальное уравнение движения:
Продифференцировав выражение суммы работ по координате ψ, получим дифференциальное уравнение движения:
Слайд 7Учитывая, что , получаем дифференцированием
угловое ускорение звена приведения
Учитывая, что , получаем дифференцированием
угловое ускорение звена приведения
Слайд 8МА можно представить как одно звено с переменным моментом инерции, в общем
МА можно представить как одно звено с переменным моментом инерции, в общем
Слайд 9Свяжем расчетные значения ψ со временем. Проинтегрируем и получим:
При:
Свяжем расчетные значения ψ со временем. Проинтегрируем и получим:
При:
Слайд 10Определение соответствующих моментов времени движения связано с интегрированием обратной функции
Вывод
Определение соответствующих моментов времени движения связано с интегрированием обратной функции
Вывод
 Презентация на тему Электрический ток в газах. Плазма
Презентация на тему Электрический ток в газах. Плазма  Электростатическое поле в вакууме
Электростатическое поле в вакууме Электромагнитные волны и их свойства
Электромагнитные волны и их свойства Сдача вагона экипировочной бригаде после рейса. Автосцепное оборудование пассажирского вагона
Сдача вагона экипировочной бригаде после рейса. Автосцепное оборудование пассажирского вагона Технология ремонта заднего моста автомобиля КамАЗ 6520 с разработкой технологии картера
Технология ремонта заднего моста автомобиля КамАЗ 6520 с разработкой технологии картера Физика и познание мира
Физика и познание мира Строение атома. Опыты Резерфорда
Строение атома. Опыты Резерфорда Periodicheskoe
Periodicheskoe Реактивное движение
Реактивное движение Исследование ОУ и схем их включения
Исследование ОУ и схем их включения Гироскоп
Гироскоп Презентация на тему Колебательное движение. Свободные колебания. Маятники (9 класс)
Презентация на тему Колебательное движение. Свободные колебания. Маятники (9 класс)  Кинематика 3. Движение тела, брошенного горизонтально или под углом к горизонту
Кинематика 3. Движение тела, брошенного горизонтально или под углом к горизонту Христиан Гюйгенс вклад в развитие механики
Христиан Гюйгенс вклад в развитие механики Изучение параллельного соединения проводников. лабораторная работа № 10
Изучение параллельного соединения проводников. лабораторная работа № 10 Метод расчета сложных электрических цепей
Метод расчета сложных электрических цепей Презентация на тему Сила упругости
Презентация на тему Сила упругости  Методы измерения длительности люминесценции
Методы измерения длительности люминесценции Лазерные фазовые дальномеры
Лазерные фазовые дальномеры Кривошипно-шатунный механизм
Кривошипно-шатунный механизм Виды силы трения
Виды силы трения Презентация на тему Манометры
Презентация на тему Манометры  Импульс тела. Решение задач
Импульс тела. Решение задач Формулы по физике
Формулы по физике Тест по физике в форме ЕГЭ, часть А
Тест по физике в форме ЕГЭ, часть А Зонная структура примесных полупроводников. Примесная проводимость. Типы примесных состояний
Зонная структура примесных полупроводников. Примесная проводимость. Типы примесных состояний Что изучает физика? Вводный урок в 7 классе
Что изучает физика? Вводный урок в 7 классе Плотность вещества
Плотность вещества