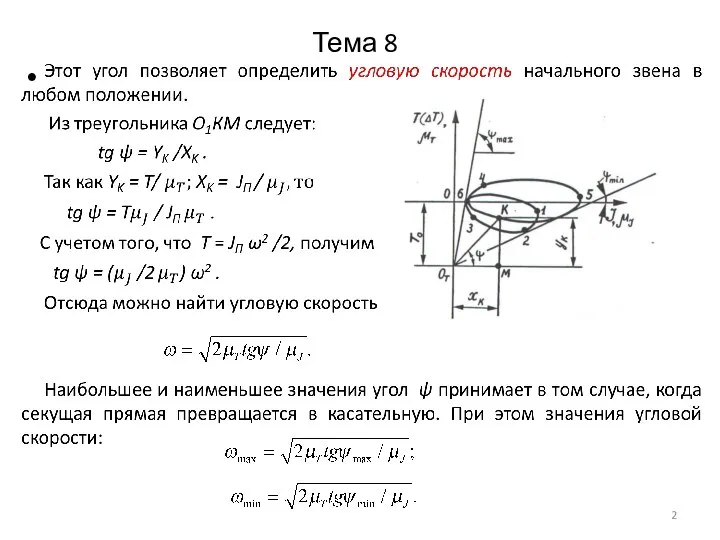
Слайд 4Тема 8
В случаях, когда установка на приводном валу маховика невозможна по
конструктивным или иным соображениям, для реализации его функций можно использовать уже существующие в структуре машинного агрегата звенья, совершающие вращательные движения: ротор энергетической машины, соединительные муфты, зубчатые колеса, кулачки, шкивы, звездочки и т.п.
Основное назначение маховика состоит в ограничении колебаний угловой скорости приводного вала в пределах, определяемых заданным коэффициентом неравномерности хода.
Определение момента инерции маховика проводится в процессе проектирования машинного агрегата и составляет одну из задач его динамического синтеза.
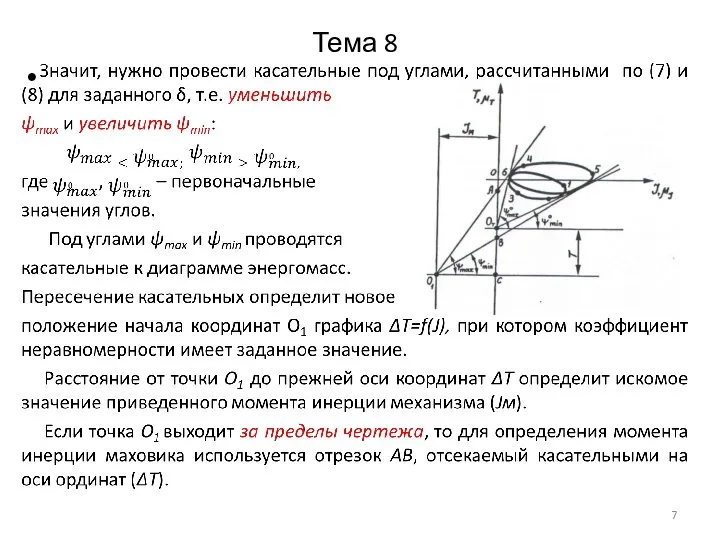
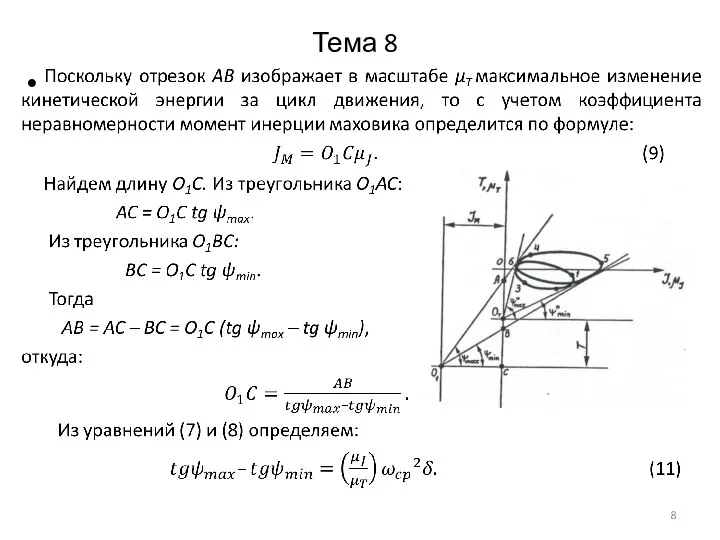
Эффективным методом решения этой задачи является использование диаграммы Виттенбауэра. Касательные, проведенные к этой диаграмме и соответствующие допустимым для заданного коэффициента неравномерности хода значениям максимальной и минимальной угловой скорости ведущего звена, позволяют определить величину необходимого момента инерции маховика.
Слайд 11Тема 9
Тема 9. Уравновешивание механизмов и балансировка вращающихся масс
9.1. Виды неуравновешенности
механизмов
При движении звеньев механизмов в КП возникают дополнительные динамические нагрузки от сил и моментов сил инерции звеньев. Это происходит из-за того, что центры масс звеньев в общем случае имеют переменные по величине и направлению ускорения. Так как всякий механизм имеет неподвижное звено – стойку, то и на нее, и на фундамент будут передаваться динамические нагрузки.
Переменные динамические нагрузки являются причиной неуравновешенности механизмов, вызывающей появление дополнительных сил трения в КП, напряжений и вибраций звеньев и фундамента, разрушений конструкций, шума и т. д. Поэтому при проектировании механизмов и машин ставится задача устранения неуравновешенности. Решить её можно установкой в определенных местах конструкции механизма дополнительных масс (противовесов), приводящих к ограничению динамических нагрузок.
Уравновешиванием называется полное или частичное устранение динамических нагрузок путем рационального распределения масс звеньев или подбора внешних сил, действующих на механизм.
Слайд 12Тема 9
Рассмотрим плоский механизм, начальное звено 1 которого вращается с постоянной
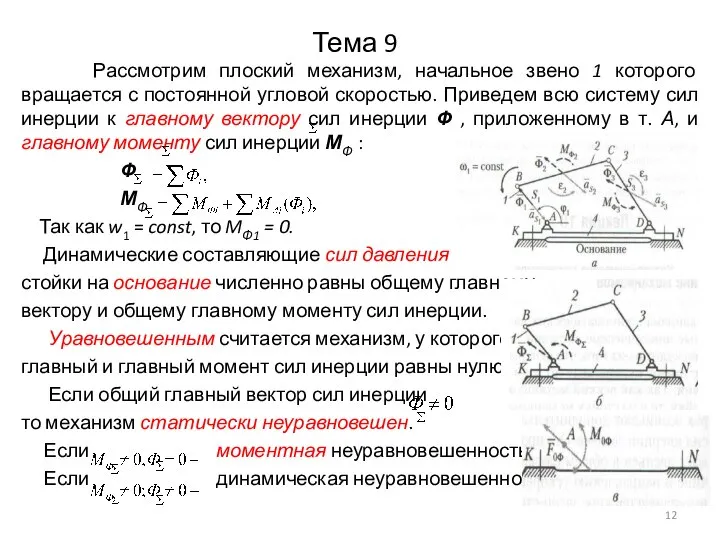
угловой скоростью. Приведем всю систему сил инерции к главному вектору сил инерции Ф , приложенному в т. А, и главному моменту сил инерции МФ :
Ф
МФ
Так как w1 = const, то MФ1 = 0.
Динамические составляющие сил давления
стойки на основание численно равны общему главному
вектору и общему главному моменту сил инерции.
Уравновешенным считается механизм, у которого
главный и главный момент сил инерции равны нулю.
Если общий главный вектор сил инерции
то механизм статически неуравновешен.
Если моментная неуравновешенность.
Если динамическая неуравновешенность.
Слайд 13Тема 9
9.2. Неуравновешенность вращающихся масс (роторов)
На вращающиеся звенья механизма действуют
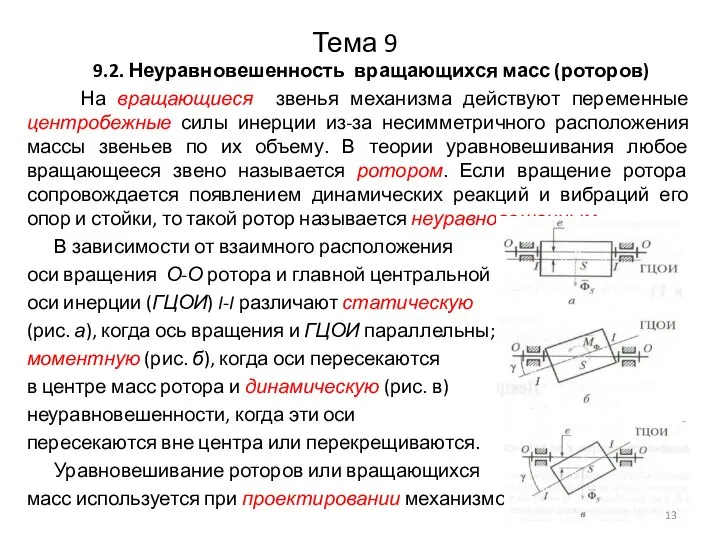
переменные центробежные силы инерции из-за несимметричного расположения массы звеньев по их объему. В теории уравновешивания любое вращающееся звено называется ротором. Если вращение ротора сопровождается появлением динамических реакций и вибраций его опор и стойки, то такой ротор называется неуравновешенным.
В зависимости от взаимного расположения
оси вращения О-О ротора и главной центральной
оси инерции (ГЦОИ) I-I различают статическую
(рис. а), когда ось вращения и ГЦОИ параллельны;
моментную (рис. б), когда оси пересекаются
в центре масс ротора и динамическую (рис. в)
неуравновешенности, когда эти оси
пересекаются вне центра или перекрещиваются.
Уравновешивание роторов или вращающихся
масс используется при проектировании механизмов.
Слайд 14Тема 9
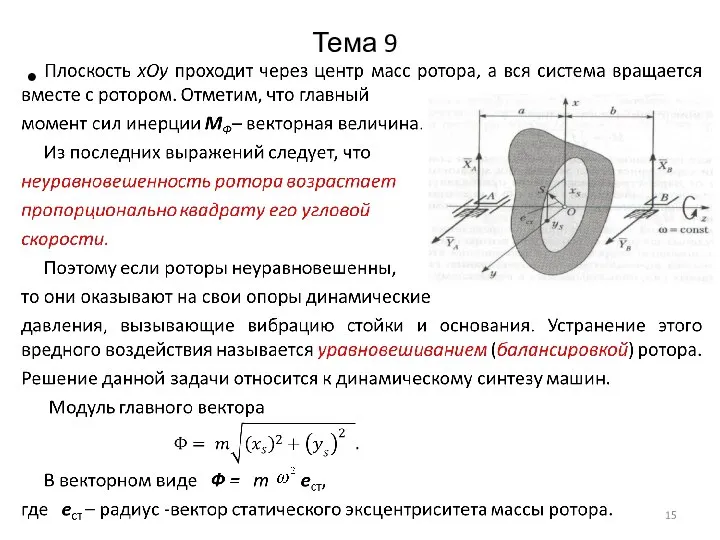
Из теоретической механики известно, что давление вращающегося тела на его
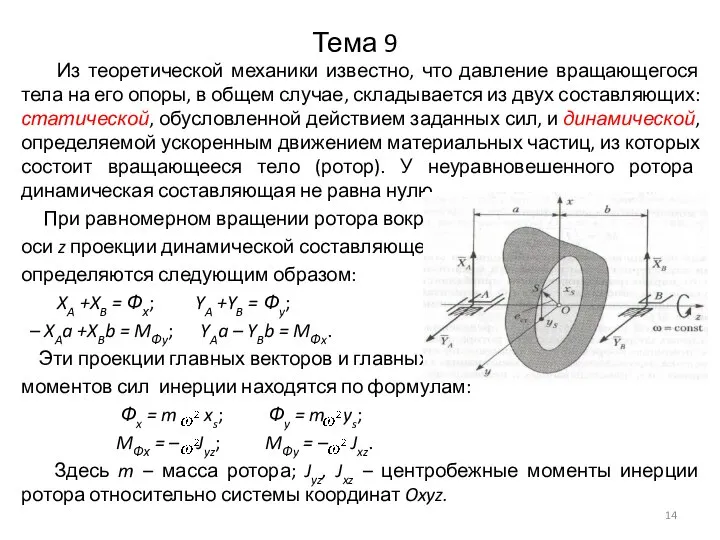
опоры, в общем случае, складывается из двух составляющих: статической, обусловленной действием заданных сил, и динамической, определяемой ускоренным движением материальных частиц, из которых состоит вращающееся тело (ротор). У неуравновешенного ротора динамическая составляющая не равна нулю.
При равномерном вращении ротора вокруг
оси z проекции динамической составляющей
определяются следующим образом:
XA +XB = Фх; YA +YB = Фy;
– XAa +XBb = MФy; YAa – YBb = MФx.
Эти проекции главных векторов и главных
моментов сил инерции находятся по формулам:
Фx = m xs; Фy = m ys;
MФх = – Jyz; MФy = – Jxz.
Здесь m – масса ротора; Jyz, Jxz – центробежные моменты инерции ротора относительно системы координат Oxyz.
Слайд 17Тема 9
Для устранения малой неуравновешенности, возникающей после изготовления звеньев и их
монтажа из-за несоблюдения размеров в процессе изготовления, неточности сборки, неоднородности материала, звенья подвергают балансировке. Балансировкой называется процесс уравновешивания вращающихся звеньев путем подбора и установки дополнительных масс.
Если масса ротора распределена относительно оси вращения равномерно, то ГЦОИ совпадает с осью вращения и ротор является уравновешенным.
Различают балансировку:
– статическую, которую производят для достаточно плоских роторов типа дисков, колес, маховиков, шкивов. Ротор при этом устанавливают в опорах с малым трением (например, на призмах) и путем добавления масс или высверливания добиваются безразличного положения балансируемого ротора на опорах;
– динамическую, которую выполняют для роторов, имеющих значительную длину (валы, широкие колеса, шкивы и т.д.), на специальных станках.
Слайд 18Тема 9
9.3. Уравновешивание механизмов
Целью уравновешивания механизмов является устранение переменных во времени
и пространстве воздействий стойки механизма на основание и фундамент.
Полное уравновешивание (статическое, моментное и динамическое) рычажных механизмов является очень трудной задачей, поэтому в большинстве случаев ограничиваются их статическим уравновешиванием. Однако и его не всегда удается осуществить в полной мере. В этих случаях производится частичное статическое уравновешивание.
При статическом уравновешивании механизма необходимо обеспечить условие Ф = 0.
Так как масса системы всех подвижных звеньев то ускорение центра масс S этой должно быть равным нулю (aSM = 0). Это условие выполняется тогда, когда центр масс S системы подвижных звеньев не перемещается.
Таким образом, статическое уравновешивание есть такое действие, в результате которого центр масс системы подвижных звеньев работающего механизма становится неподвижным.
Слайд 19Тема 9
На практике наиболее часто применяют следующие способы статического уравновешивания.
1.
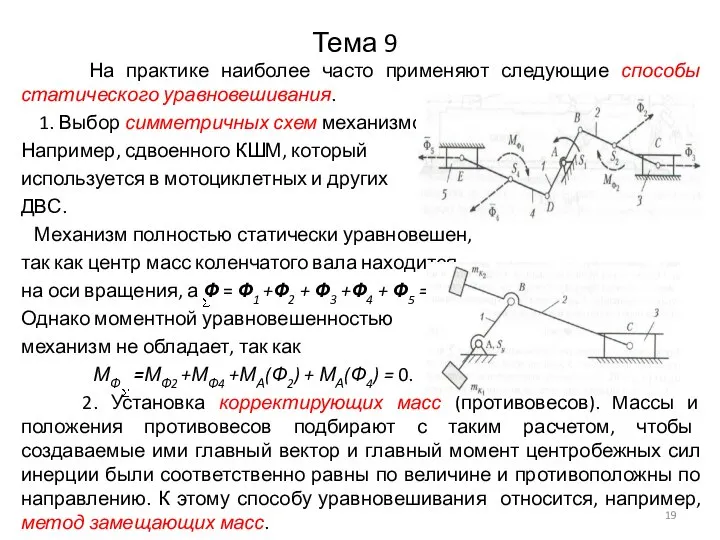
Выбор симметричных схем механизмов.
Например, сдвоенного КШМ, который
используется в мотоциклетных и других
ДВС.
Механизм полностью статически уравновешен,
так как центр масс коленчатого вала находится
на оси вращения, а Ф = Ф1 +Ф2 + Ф3 +Ф4 + Ф5 = 0.
Однако моментной уравновешенностью
механизм не обладает, так как
МФ =МФ2 +МФ4 +МА(Ф2) + МА(Ф4) = 0.
2. Установка корректирующих масс (противовесов). Массы и положения противовесов подбирают с таким расчетом, чтобы создаваемые ими главный вектор и главный момент центробежных сил инерции были соответственно равны по величине и противоположны по направлению. К этому способу уравновешивания относится, например, метод замещающих масс.
Слайд 20Тема 9
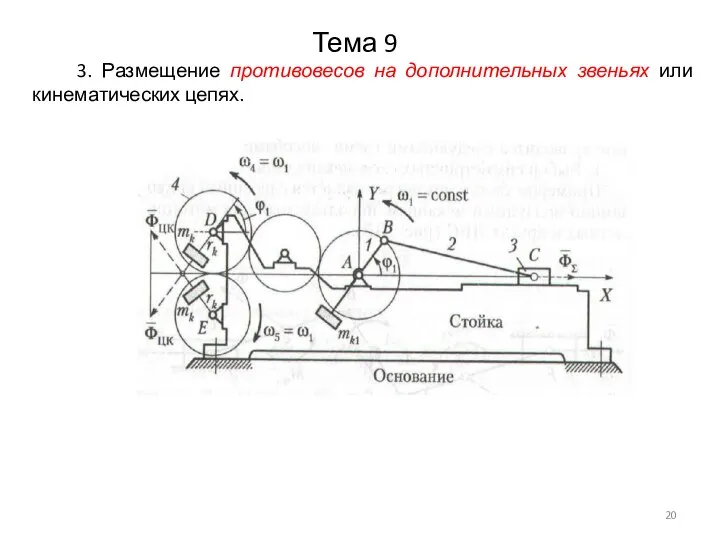
3. Размещение противовесов на дополнительных звеньях или кинематических цепях.
Слайд 21Тема 9
9.4. Метод замещающих масс
Этот метод состоит в следующем: каждое
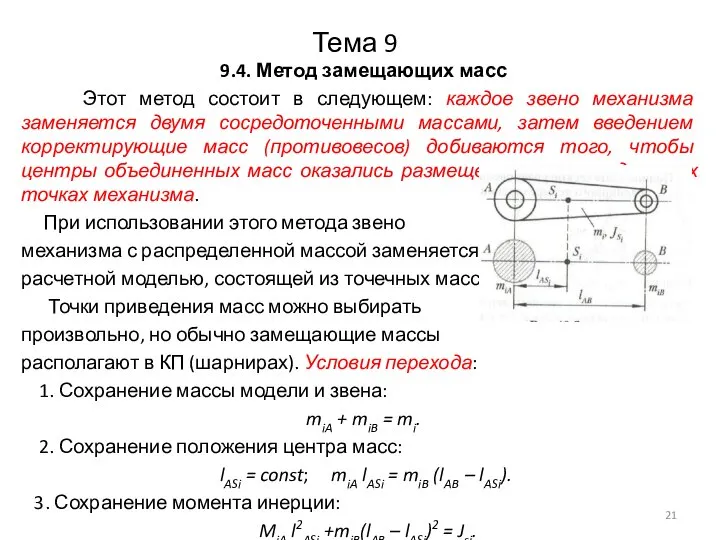
звено механизма заменяется двумя сосредоточенными массами, затем введением корректирующие масс (противовесов) добиваются того, чтобы центры объединенных масс оказались размещенными в неподвижных точках механизма.
При использовании этого метода звено
механизма с распределенной массой заменяется
расчетной моделью, состоящей из точечных масс.
Точки приведения масс можно выбирать
произвольно, но обычно замещающие массы
располагают в КП (шарнирах). Условия перехода:
1. Сохранение массы модели и звена:
miA + miB = mi.
2. Сохранение положения центра масс:
lASi = const; miA lASi = miB (lAB – lASi).
3. Сохранение момента инерции:
MiA l2ASi +miB(lAB – lASi)2 = Jsi.
Слайд 22Тема 9
Очевидно, что выполнить три условия системой с двумя массами невозможно,
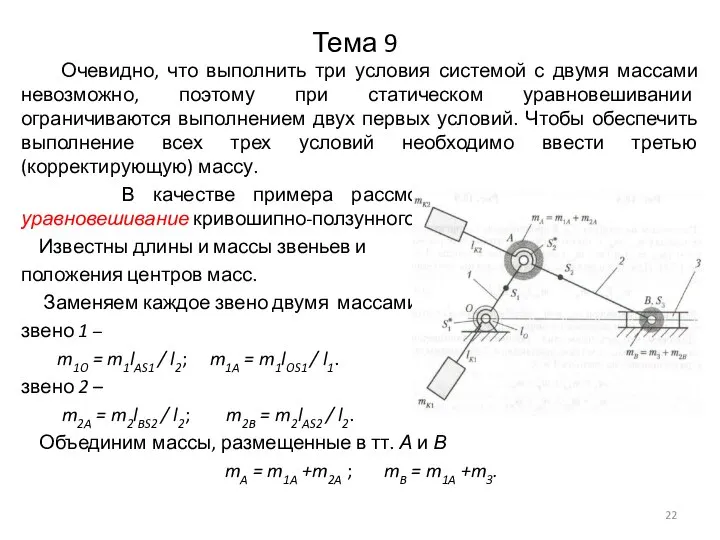
поэтому при статическом уравновешивании ограничиваются выполнением двух первых условий. Чтобы обеспечить выполнение всех трех условий необходимо ввести третью (корректирующую) массу.
В качестве примера рассмотрим полное статическое уравновешивание кривошипно-ползунного механизма.
Известны длины и массы звеньев и
положения центров масс.
Заменяем каждое звено двумя массами:
звено 1 –
m1O = m1lAS1 / l2; m1A = m1lOS1 / l1.
звено 2 –
m2A = m2lBS2 / l2; m2B = m2lAS2 / l2.
Объединим массы, размещенные в тт. А и В
mA = m1A +m2A ; mB = m1A +m3.
Слайд 23Тема 9
Массу звена 3 уравновесим корректирующей массой mK2 , определяемой из
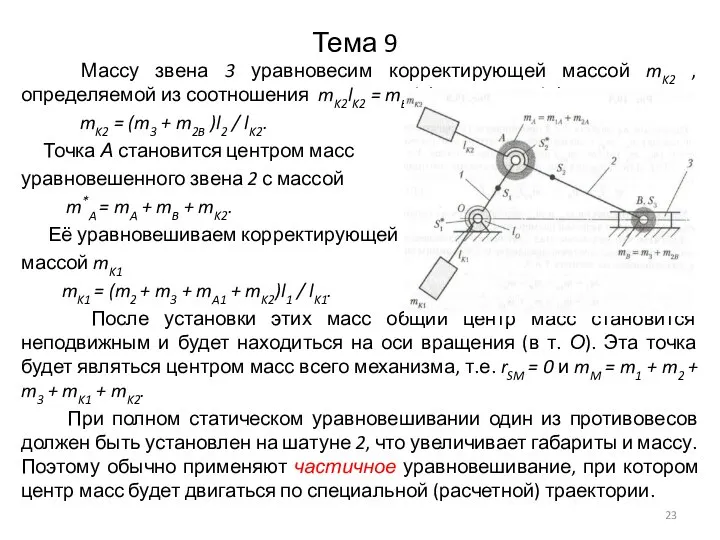
соотношения mK2lK2 = mB l2 (задавшись lK2):
mK2 = (m3 + m2B )l2 / lK2.
Точка А становится центром масс
уравновешенного звена 2 с массой
m*A = mA + mB + mK2.
Её уравновешиваем корректирующей
массой mK1
mK1 = (m2 + m3 + mA1 + mK2)l1 / lK1.
После установки этих масс общий центр масс становится неподвижным и будет находиться на оси вращения (в т. О). Эта точка будет являться центром масс всего механизма, т.е. rSM = 0 и mM = m1 + m2 + m3 + mK1 + mK2.
При полном статическом уравновешивании один из противовесов должен быть установлен на шатуне 2, что увеличивает габариты и массу. Поэтому обычно применяют частичное уравновешивание, при котором центр масс будет двигаться по специальной (расчетной) траектории.

 Поперечный изгиб
Поперечный изгиб Частицы с отрицательной энергией в эргосфере чёрных дыр
Частицы с отрицательной энергией в эргосфере чёрных дыр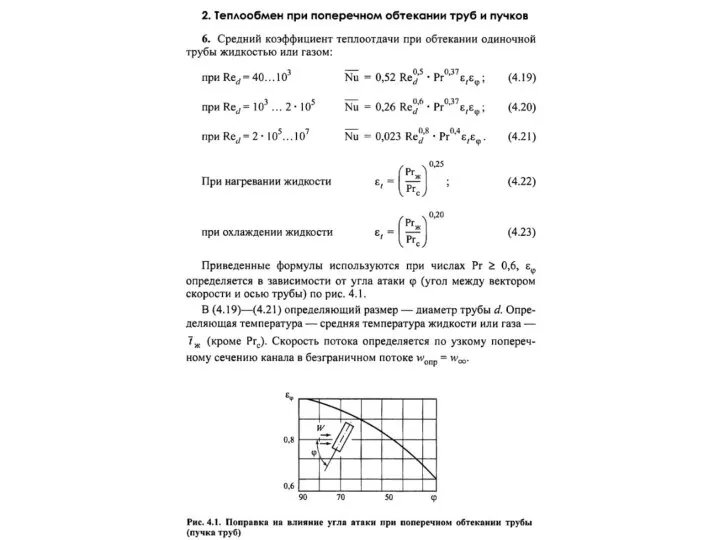 Теплообмен при поперечном обтекании труб и пучков
Теплообмен при поперечном обтекании труб и пучков Работа, мощность и энергия
Работа, мощность и энергия Силовая электроника
Силовая электроника Элементы теории поля, используемые в электрофизиологии
Элементы теории поля, используемые в электрофизиологии Инструмент MATE
Инструмент MATE Свободные колебания
Свободные колебания Закон всемирного тяготения, Сила тяжести, невесомость, вес тела
Закон всемирного тяготения, Сила тяжести, невесомость, вес тела Механическое движение. Материальная точка. Тело отсчёта. Система отсчета. Траектория. Путь. Перемещение. Скорость
Механическое движение. Материальная точка. Тело отсчёта. Система отсчета. Траектория. Путь. Перемещение. Скорость Классификация АЭС
Классификация АЭС Сложение двух сил, направленных по одной прямой. Равнодействующая сил. 7 класс
Сложение двух сил, направленных по одной прямой. Равнодействующая сил. 7 класс Приемы резания и зачистки тонколистового металла и проволоки
Приемы резания и зачистки тонколистового металла и проволоки 2. Постоянный электрический ток (1)
2. Постоянный электрический ток (1) Импульс тела. Закон сохранения импульса
Импульс тела. Закон сохранения импульса Переменный электрический ток. Вынужденные электромагнитные колебания
Переменный электрический ток. Вынужденные электромагнитные колебания Сообщающиеся сосуды
Сообщающиеся сосуды Теплоусвоение внутренних поверхностей ограждающих конструкций
Теплоусвоение внутренних поверхностей ограждающих конструкций Презентация на тему Амперметр
Презентация на тему Амперметр  Косой изгиб. Построение эпюр нормальных напряжений по сечению при косом изгибе и внецентренном сжатии
Косой изгиб. Построение эпюр нормальных напряжений по сечению при косом изгибе и внецентренном сжатии Абсолютные и относительные величины
Абсолютные и относительные величины Подготовка к ГИА по физике. Изменения в экзаменационной работе 2012 года по сравнению с 2011 годом
Подготовка к ГИА по физике. Изменения в экзаменационной работе 2012 года по сравнению с 2011 годом Жидкое состояние вещества
Жидкое состояние вещества Построение изображений в линзах
Построение изображений в линзах Сила трения 7 класс
Сила трения 7 класс Презентация на тему Реактивное движение ракеты
Презентация на тему Реактивное движение ракеты  Мэгэриф хэм фэн
Мэгэриф хэм фэн Определение скорости и ускорения точки
Определение скорости и ускорения точки