- Произвольная плоская система сил

Содержание
- 2. 3.1. Приведение произвольной плоской системы сил к простейшему виду
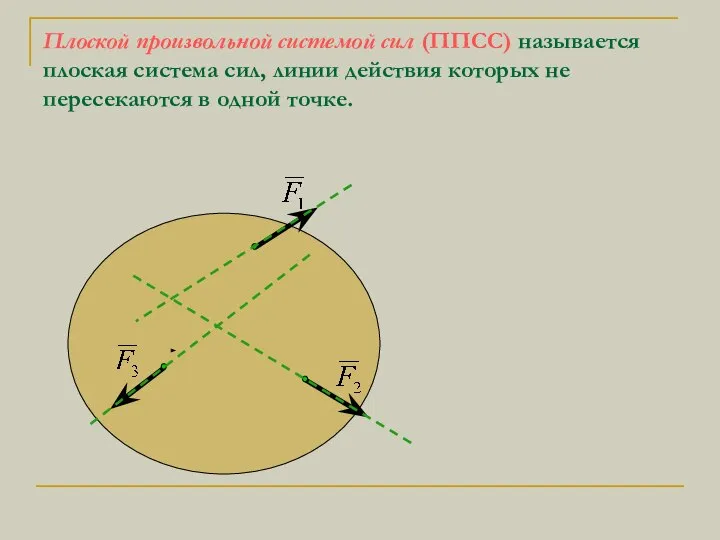
- 3. Плоской произвольной системой сил (ППСС) называется плоская система сил, линии действия которых не пересекаются в одной
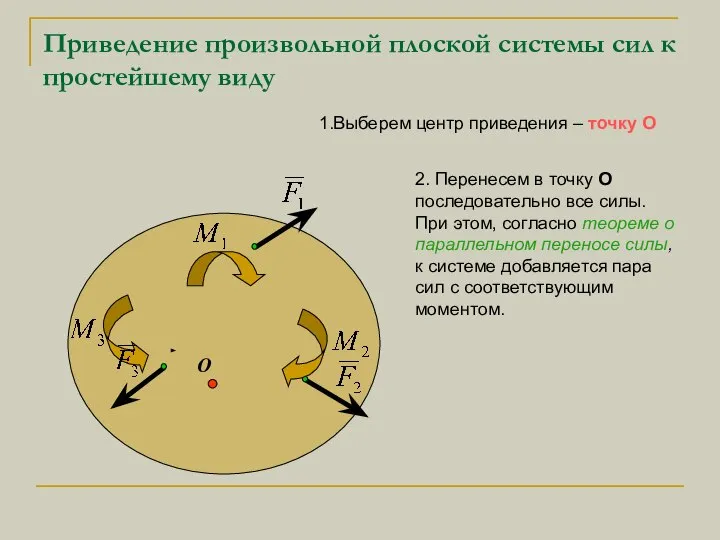
- 4. Приведение произвольной плоской системы сил к простейшему виду 1.Выберем центр приведения – точку О О 2.
- 5. Приведение произвольной плоской системы сил к простейшему виду 3. В результате приведения всех сил к точке
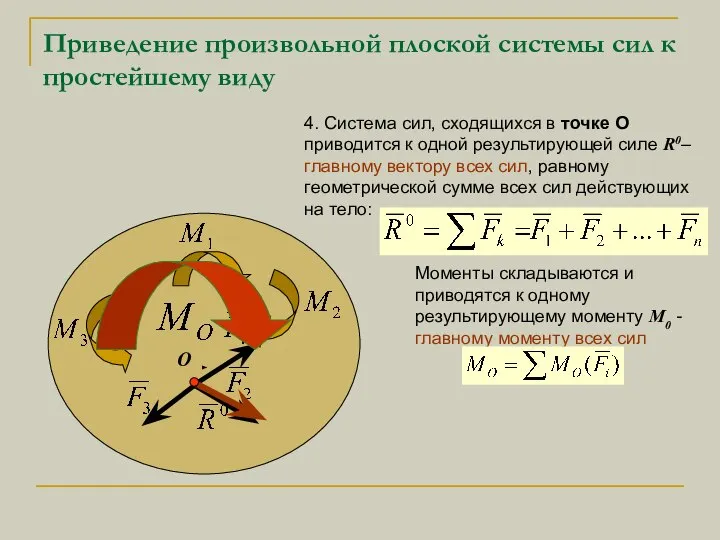
- 6. Приведение произвольной плоской системы сил к простейшему виду 4. Система сил, сходящихся в точке О приводится
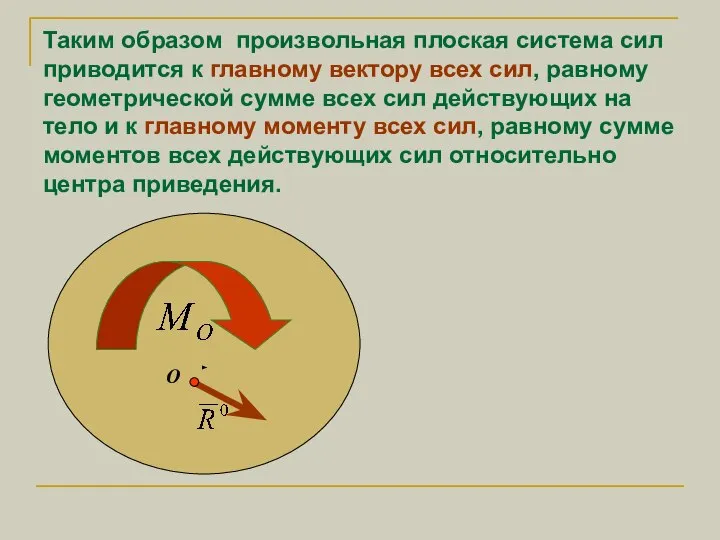
- 7. Таким образом произвольная плоская система сил приводится к главному вектору всех сил, равному геометрической сумме всех
- 8. 3.2. Условия равновесия произвольной плоской системы сил
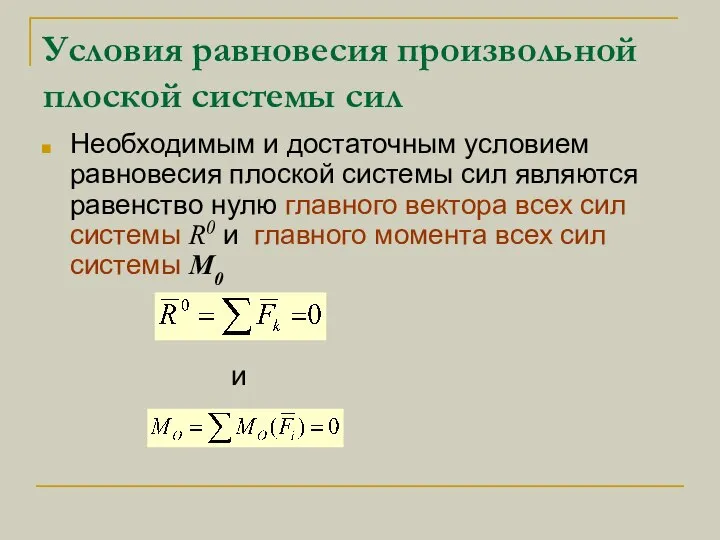
- 9. Условия равновесия произвольной плоской системы сил Необходимым и достаточным условием равновесия плоской системы сил являются равенство
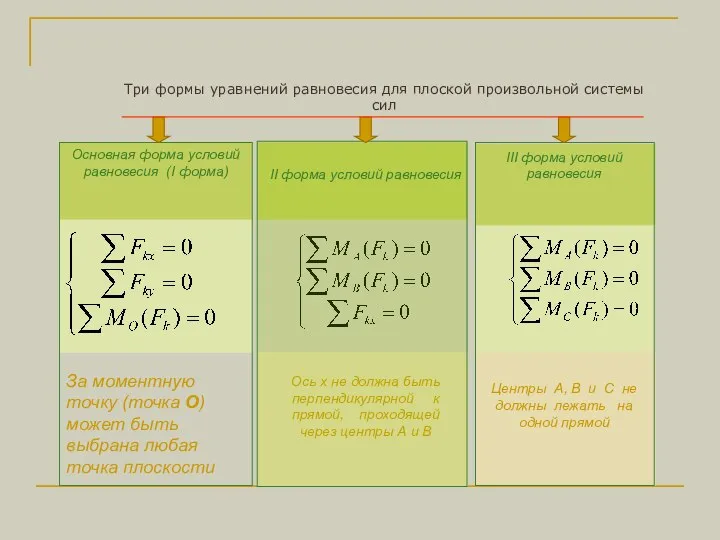
- 10. Ось х не должна быть перпендикулярной к прямой, проходящей через центры А и В Центры А,
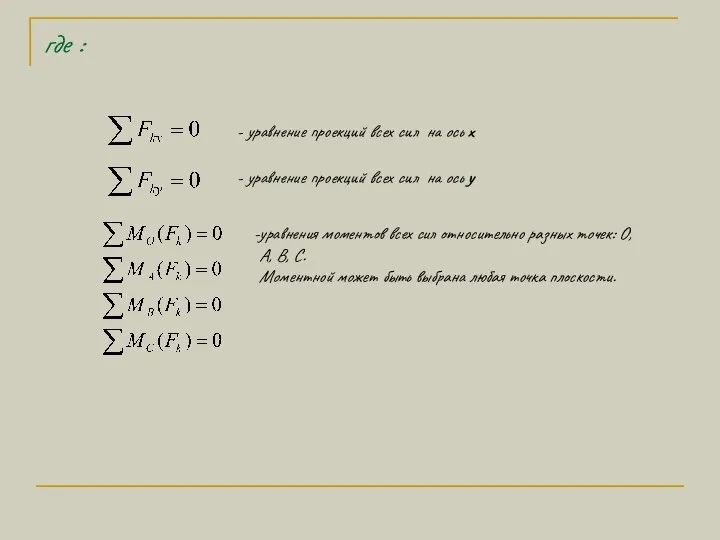
- 11. - уравнение проекций всех сил на ось х - уравнение проекций всех сил на ось у
- 12. Важно ! Для одного твердого тела можно составить только три (!) независимых уравнения равновесия по одной
- 13. Важно ! В задаче на равновесие одного твердого тела может быть только три неизвестные силы (обычно
- 14. 3.3. Виды сил, действующих на тело
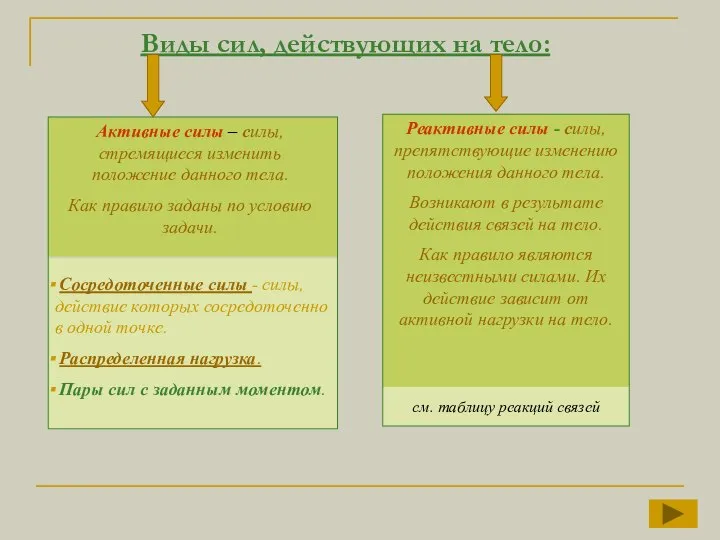
- 15. Виды сил, действующих на тело: см. таблицу реакций связей Активные силы – силы, стремящиеся изменить положение
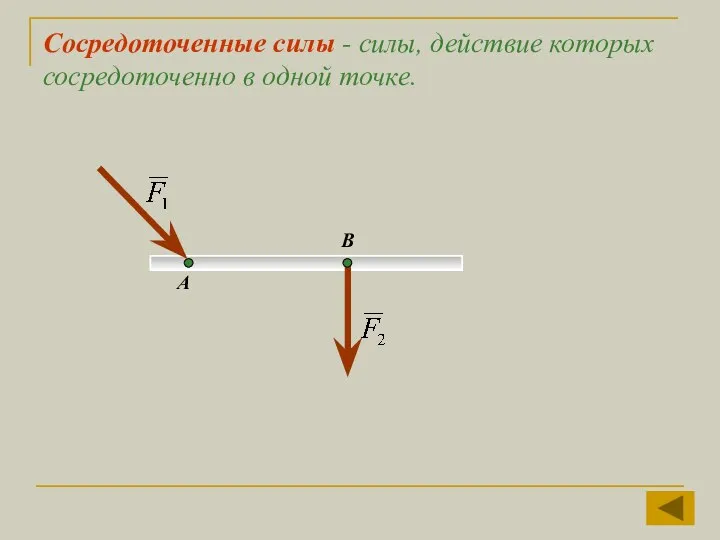
- 16. Сосредоточенные силы - силы, действие которых сосредоточенно в одной точке. А В
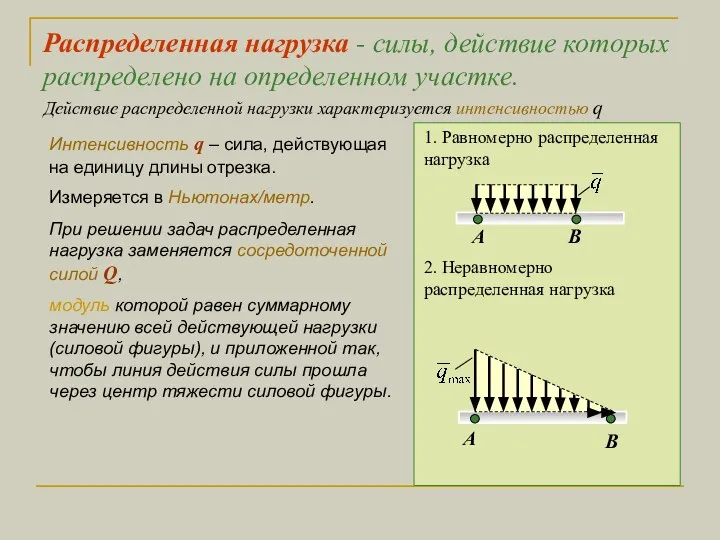
- 17. Распределенная нагрузка - силы, действие которых распределено на определенном участке. Действие распределенной нагрузки характеризуется интенсивностью q
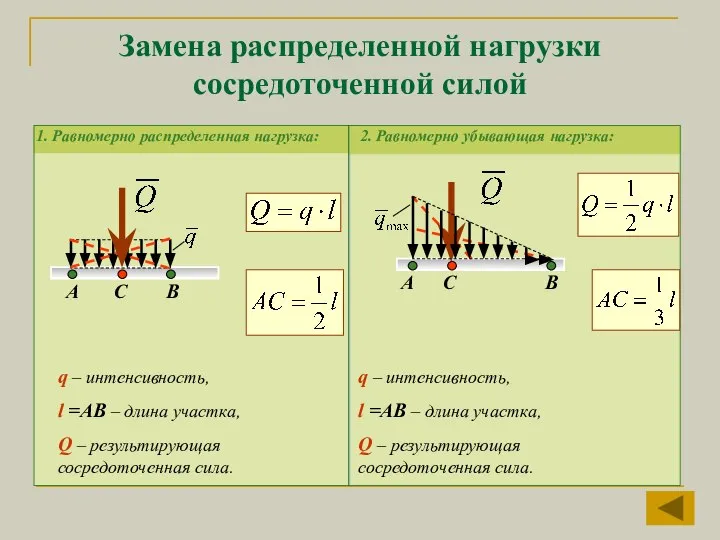
- 18. Замена распределенной нагрузки сосредоточенной силой 1. Равномерно распределенная нагрузка: А В С 2. Равномерно убывающая нагрузка:
- 20. Скачать презентацию
Слайд 3Плоской произвольной системой сил (ППСС) называется плоская система сил, линии действия которых
Плоской произвольной системой сил (ППСС) называется плоская система сил, линии действия которых
Слайд 4Приведение произвольной плоской системы сил к простейшему виду
1.Выберем центр приведения – точку
Приведение произвольной плоской системы сил к простейшему виду
1.Выберем центр приведения – точку
Слайд 5Приведение произвольной плоской системы сил к простейшему виду
3. В результате приведения всех
Приведение произвольной плоской системы сил к простейшему виду
3. В результате приведения всех

Слайд 6Приведение произвольной плоской системы сил к простейшему виду
4. Система сил, сходящихся в
Приведение произвольной плоской системы сил к простейшему виду
4. Система сил, сходящихся в
Слайд 7Таким образом произвольная плоская система сил приводится к главному вектору всех сил,
Таким образом произвольная плоская система сил приводится к главному вектору всех сил,
Слайд 83.2. Условия равновесия произвольной плоской системы сил
3.2. Условия равновесия произвольной плоской системы сил
Слайд 9Условия равновесия произвольной плоской системы сил
Необходимым и достаточным условием равновесия плоской системы
Условия равновесия произвольной плоской системы сил
Необходимым и достаточным условием равновесия плоской системы
Слайд 10Ось х не должна быть перпендикулярной к прямой, проходящей через центры А
Ось х не должна быть перпендикулярной к прямой, проходящей через центры А
Слайд 11- уравнение проекций всех сил на ось х
- уравнение проекций всех сил
- уравнение проекций всех сил на ось х
- уравнение проекций всех сил
Слайд 12Важно !
Для одного твердого тела можно составить только три (!) независимых уравнения
Важно !
Для одного твердого тела можно составить только три (!) независимых уравнения
Слайд 13Важно !
В задаче на равновесие одного твердого тела может быть только три
Важно !
В задаче на равновесие одного твердого тела может быть только три
Слайд 143.3. Виды сил, действующих на тело
3.3. Виды сил, действующих на тело
Слайд 15Виды сил, действующих на тело:
см. таблицу реакций связей
Активные силы – силы, стремящиеся
Виды сил, действующих на тело:
см. таблицу реакций связей
Активные силы – силы, стремящиеся
Слайд 16Сосредоточенные силы - силы, действие которых сосредоточенно в одной точке.
А
В
Сосредоточенные силы - силы, действие которых сосредоточенно в одной точке.
А
В
Слайд 17Распределенная нагрузка - силы, действие которых распределено на определенном участке.
Действие распределенной нагрузки
Распределенная нагрузка - силы, действие которых распределено на определенном участке.
Действие распределенной нагрузки
Слайд 18Замена распределенной нагрузки сосредоточенной силой
1. Равномерно распределенная нагрузка:
А
В
С
2. Равномерно убывающая нагрузка:
А
В
С
q –
Замена распределенной нагрузки сосредоточенной силой
1. Равномерно распределенная нагрузка:
А
В
С
2. Равномерно убывающая нагрузка:
А
В
С
q –
 Классическая теория излучения. Общая теория Максвелла — Лоренца
Классическая теория излучения. Общая теория Максвелла — Лоренца Презентация по физике "Работа электростатического поля по перемещению заряда" -
Презентация по физике "Работа электростатического поля по перемещению заряда" -  Постройка радиоуправляемой пилотажной модели самолета
Постройка радиоуправляемой пилотажной модели самолета Особенности водно-химического режима в контурах ЯЭУ
Особенности водно-химического режима в контурах ЯЭУ Судостроение. Что общего у предметов?
Судостроение. Что общего у предметов? Получение радиоактивных изотопов и их применение
Получение радиоактивных изотопов и их применение Презентация на тему Агрегатное состояние вещества
Презентация на тему Агрегатное состояние вещества  9-1 تغيير الأصوات
9-1 تغيير الأصوات Физика вокруг нас
Физика вокруг нас Варикапы. Основные параметры варикапов
Варикапы. Основные параметры варикапов Электричество и магнетизм. Лекция 12-2. Ферромагнетики
Электричество и магнетизм. Лекция 12-2. Ферромагнетики Линза. Построение изображения в линзе
Линза. Построение изображения в линзе Плоско-параллельное движение твердого тела. Лекция 8
Плоско-параллельное движение твердого тела. Лекция 8 Самоиндукция. Величина э.д.с. самоиндукции
Самоиндукция. Величина э.д.с. самоиндукции Сила трения
Сила трения Виды тепловых двигателей
Виды тепловых двигателей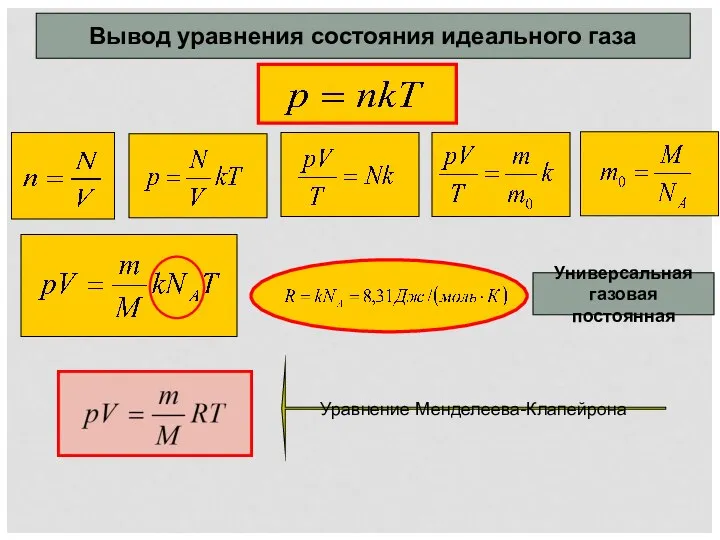 Вывод уравнения Менделеева-Клайперона. Изопроцессы
Вывод уравнения Менделеева-Клайперона. Изопроцессы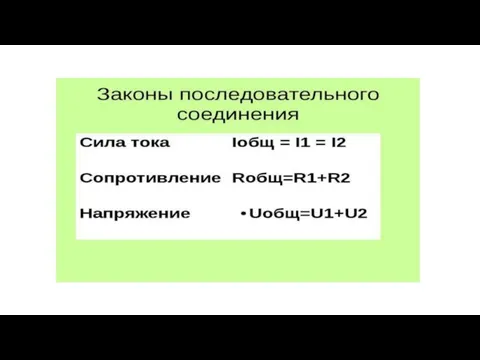 Параллельное соединение проводников
Параллельное соединение проводников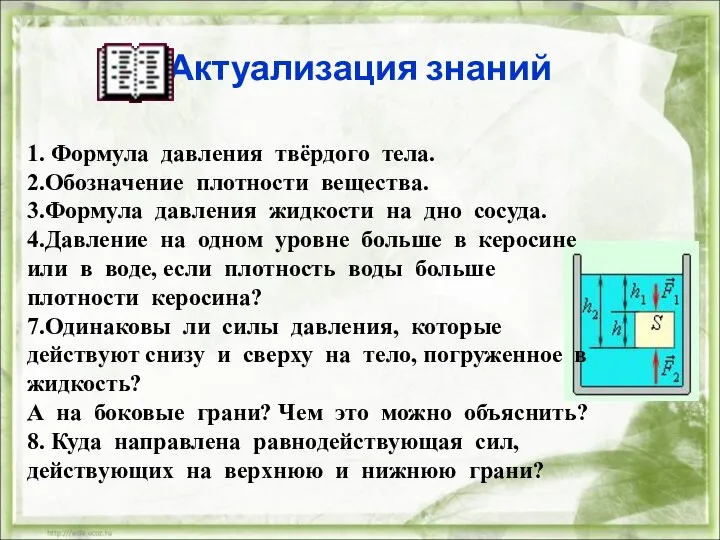 Актуализация знаний
Актуализация знаний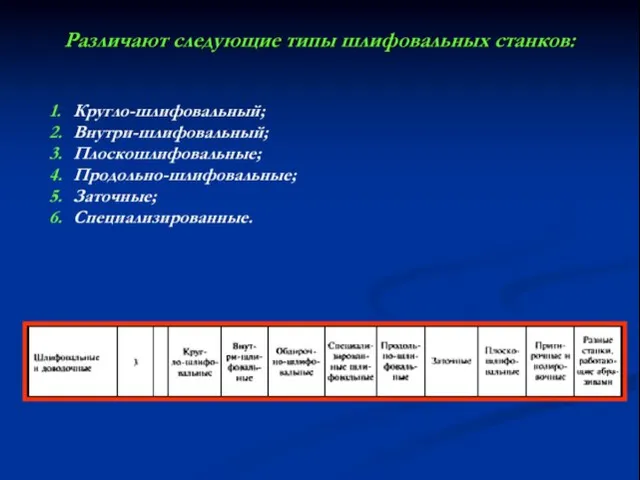 Типы шлифовальных станков
Типы шлифовальных станков Квантовая механика
Квантовая механика Как научиться решать задачи по физике
Как научиться решать задачи по физике Закон Ома для участка цепи
Закон Ома для участка цепи Анализ конструкции раздатки, дифференциала, блокировки дифференциала
Анализ конструкции раздатки, дифференциала, блокировки дифференциала Эффект Боке
Эффект Боке Электрический ток в газах
Электрический ток в газах Оптические приборы
Оптические приборы История машин. 5 класс
История машин. 5 класс