- Работа с lego mindstorms ev3. Задание № 2: основы поворота

Содержание
- 2. СТРУКТУРА ЗАДАНИЯ Изучение поворота робота на желаемые градусы Изучение разницы между поворотом на месте и одним
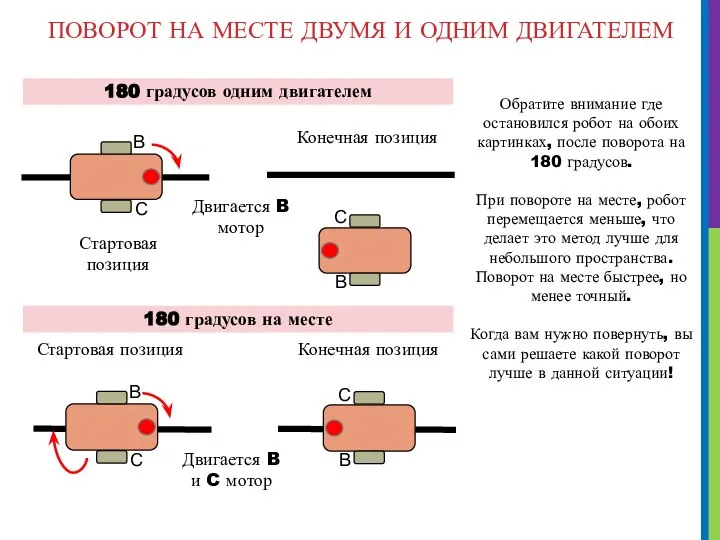
- 3. ПОВОРОТ НА МЕСТЕ ДВУМЯ И ОДНИМ ДВИГАТЕЛЕМ 180 градусов одним двигателем 180 градусов на месте Обратите
- 4. КАК ДЕЛАТЬ ПОВОРОТ НА МЕСТЕ/ОДНИМ КОЛЕСОМ Менять значение поворота здесь Блок рулевого управления
- 6. Скачать презентацию
Слайд 2СТРУКТУРА ЗАДАНИЯ
Изучение поворота робота на желаемые градусы
Изучение разницы между поворотом на месте
СТРУКТУРА ЗАДАНИЯ
Изучение поворота робота на желаемые градусы
Изучение разницы между поворотом на месте
Слайд 3ПОВОРОТ НА МЕСТЕ ДВУМЯ И ОДНИМ ДВИГАТЕЛЕМ
180 градусов одним двигателем
180 градусов на
ПОВОРОТ НА МЕСТЕ ДВУМЯ И ОДНИМ ДВИГАТЕЛЕМ
180 градусов одним двигателем
180 градусов на
Слайд 4КАК ДЕЛАТЬ ПОВОРОТ НА МЕСТЕ/ОДНИМ КОЛЕСОМ
Менять значение поворота здесь
Блок рулевого управления
КАК ДЕЛАТЬ ПОВОРОТ НА МЕСТЕ/ОДНИМ КОЛЕСОМ
Менять значение поворота здесь
Блок рулевого управления

 Французский язык
Французский язык Radiation (излучения)
Radiation (излучения) Резьбовые соединения
Резьбовые соединения Электрическое поле
Электрическое поле Сила тока и напряжение
Сила тока и напряжение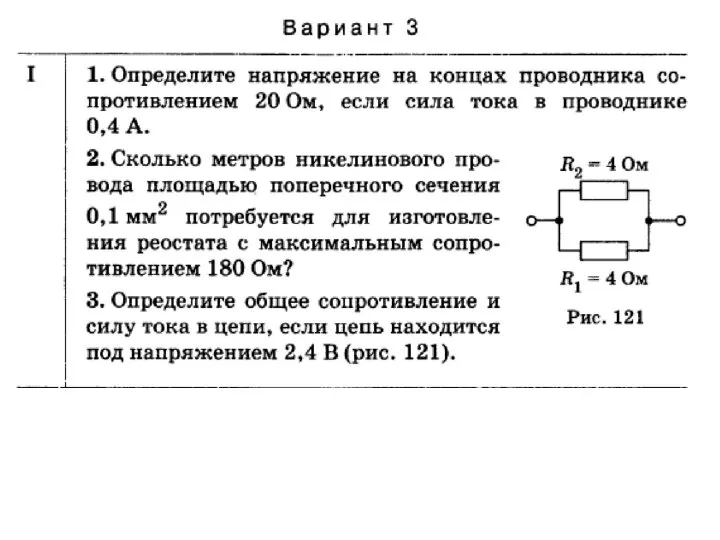 Задачи по физике. Электрический ток
Задачи по физике. Электрический ток Геометрическое движение в физике
Геометрическое движение в физике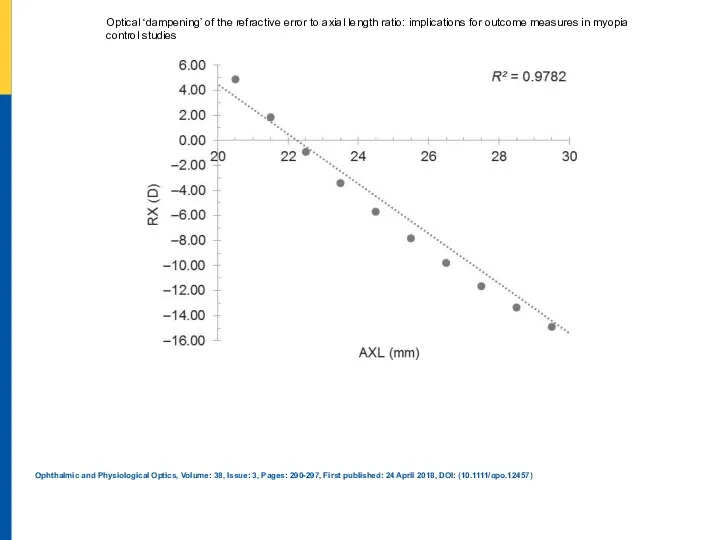 Ophthalmic and Physiological Optics, Volume
Ophthalmic and Physiological Optics, Volume Иллюзии и Физика. Вечная Борьба
Иллюзии и Физика. Вечная Борьба Движение небесных тел под действием сил тяготения
Движение небесных тел под действием сил тяготения Абсолютный нуль температуры
Абсолютный нуль температуры магнитное поле (1)
магнитное поле (1) Газовые законы
Газовые законы Презентация на тему Великое открытие Архимеда
Презентация на тему Великое открытие Архимеда  Распространение колебаний в среде. Волны. Продольные и поперечные волны
Распространение колебаний в среде. Волны. Продольные и поперечные волны Аксиально-поршневые гидромашины
Аксиально-поршневые гидромашины Аналитические методы в современных исследованиях. Инструментальные и хроматографические методы анализа
Аналитические методы в современных исследованиях. Инструментальные и хроматографические методы анализа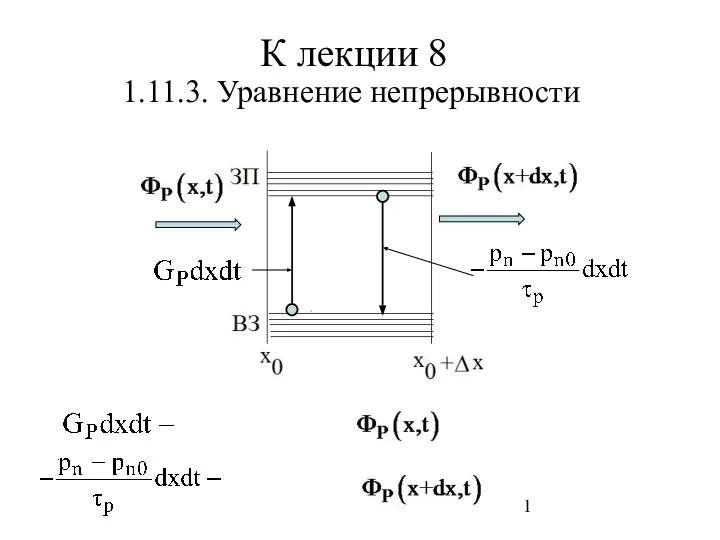 Уравнение непрерывности
Уравнение непрерывности Электромагнитная индукция
Электромагнитная индукция Гравитационное поле Земли. Часть 2
Гравитационное поле Земли. Часть 2 Распределения вероятности. Нормальное распределение. Вероятностная энтропия. Лекция 07(10)
Распределения вероятности. Нормальное распределение. Вероятностная энтропия. Лекция 07(10) Презентация на тему Магнитные свойства вещества
Презентация на тему Магнитные свойства вещества  Коэффициент отражения
Коэффициент отражения Выпуск первого автомобиля в г. Тольятти
Выпуск первого автомобиля в г. Тольятти Теоретическая механика. Динамика. Основные понятия и законы динамики
Теоретическая механика. Динамика. Основные понятия и законы динамики Звуковые волны
Звуковые волны Соленоидные приводы
Соленоидные приводы Давление газа
Давление газа