- Структурный анализ и синтез механизмов. Лекция 2

Содержание
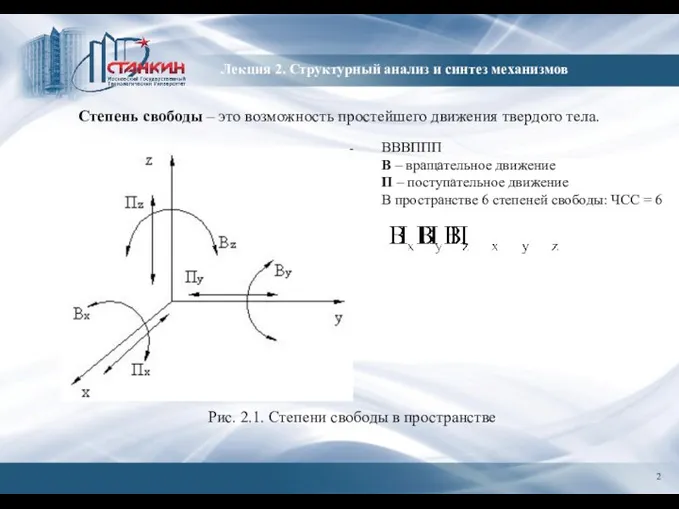
- 2. Лекция 2. Структурный анализ и синтез механизмов Степень свободы – это возможность простейшего движения твердого тела.
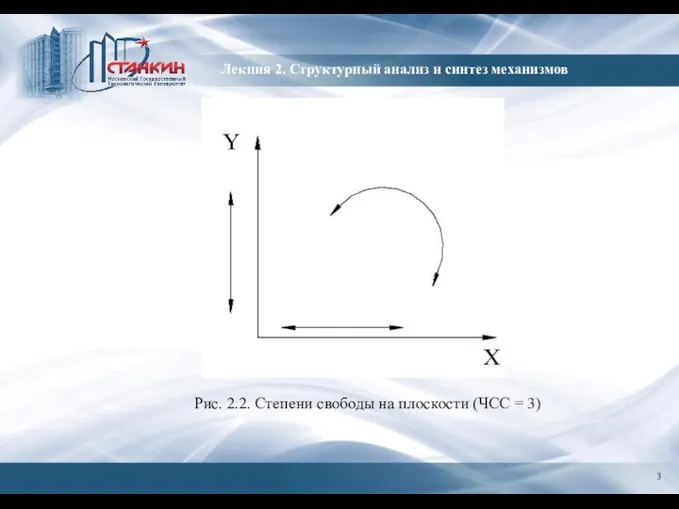
- 3. Лекция 2. Структурный анализ и синтез механизмов Рис. 2.2. Степени свободы на плоскости (ЧСС = 3)
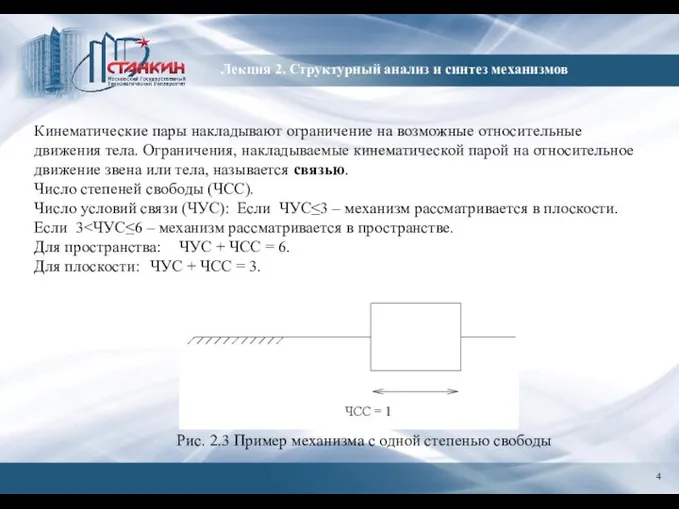
- 4. Лекция 2. Структурный анализ и синтез механизмов Кинематические пары накладывают ограничение на возможные относительные движения тела.
- 5. Лекция 2. Структурный анализ и синтез механизмов Кинематические пары классифицируются по подвижностям - классификация Добровольского (по
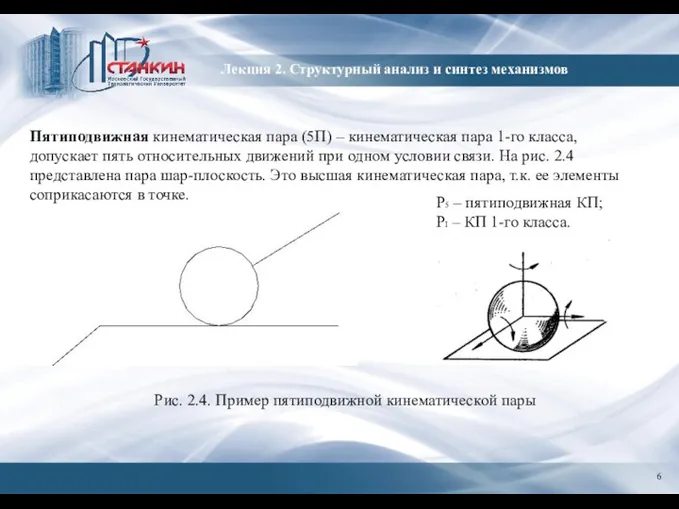
- 6. Лекция 2. Структурный анализ и синтез механизмов Пятиподвижная кинематическая пара (5П) – кинематическая пара 1-го класса,
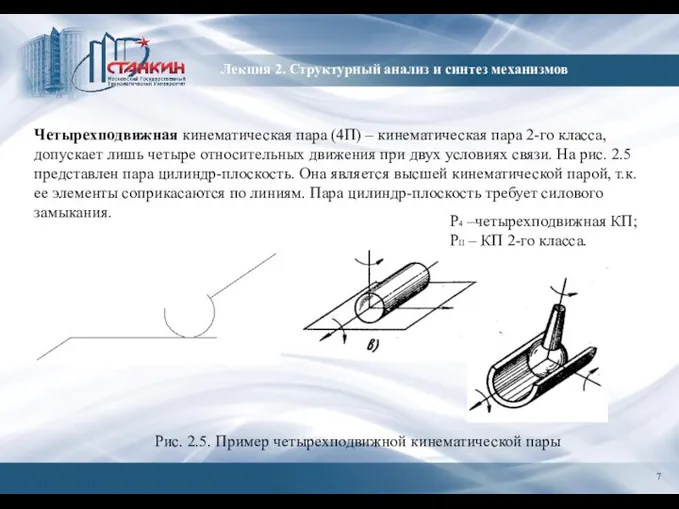
- 7. Лекция 2. Структурный анализ и синтез механизмов Четырехподвижная кинематическая пара (4П) – кинематическая пара 2-го класса,
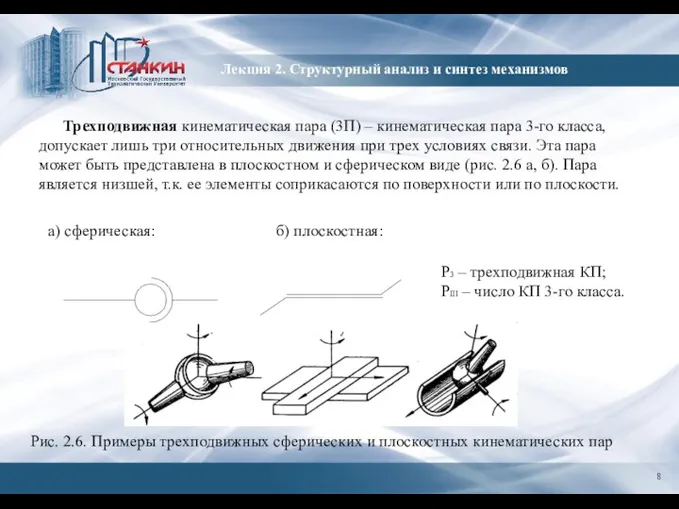
- 8. Лекция 2. Структурный анализ и синтез механизмов Трехподвижная кинематическая пара (3П) – кинематическая пара 3-го класса,
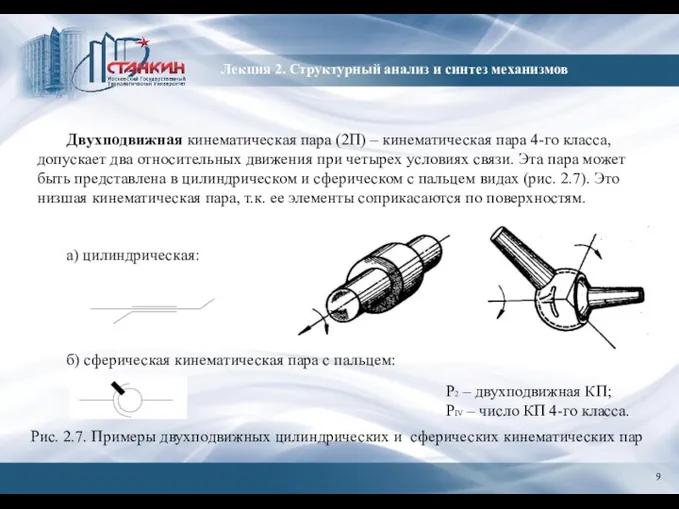
- 9. Лекция 2. Структурный анализ и синтез механизмов Двухподвижная кинематическая пара (2П) – кинематическая пара 4-го класса,
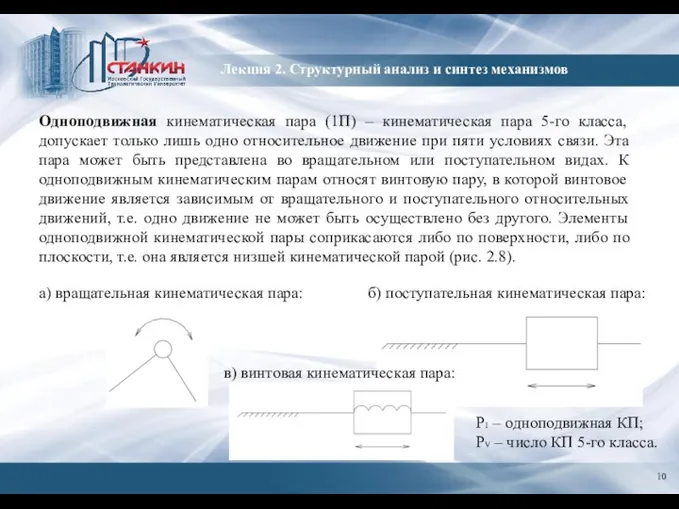
- 10. Одноподвижная кинематическая пара (1П) – кинематическая пара 5-го класса, допускает только лишь одно относительное движение при
- 11. Лекция 2. Структурный анализ и синтез механизмов 10
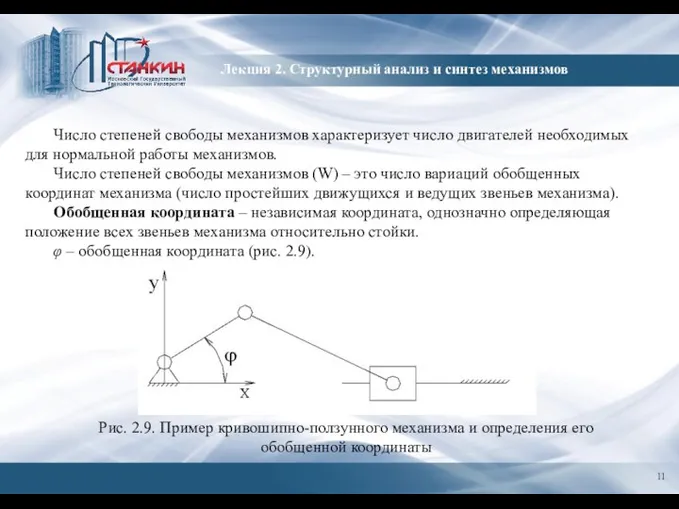
- 12. Число степеней свободы механизмов характеризует число двигателей необходимых для нормальной работы механизмов. Число степеней свободы механизмов
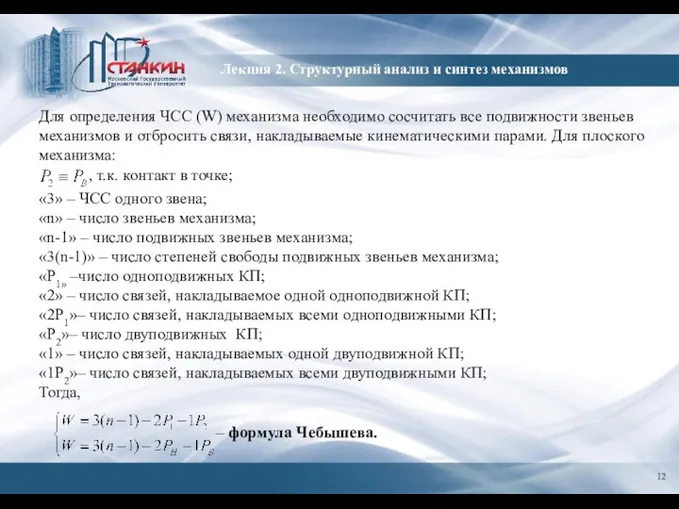
- 13. Лекция 2. Структурный анализ и синтез механизмов Для определения ЧСС (W) механизма необходимо сосчитать все подвижности
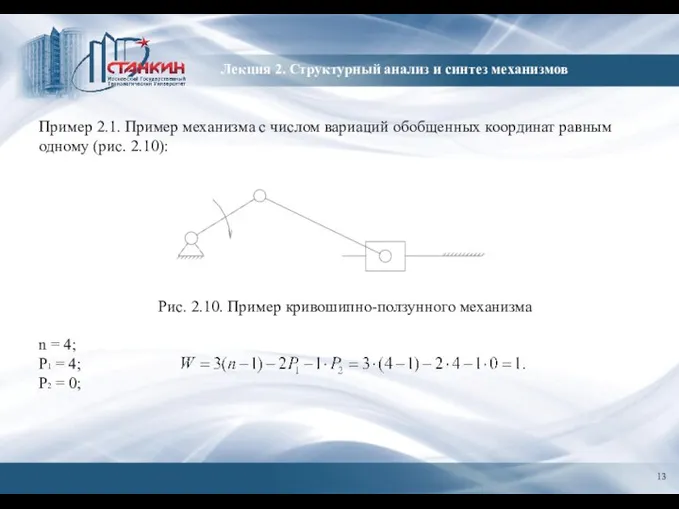
- 14. Пример 2.1. Пример механизма с числом вариаций обобщенных координат равным одному (рис. 2.10): Рис. 2.10. Пример
- 15. Лекция 2. Структурный анализ и синтез механизмов 13
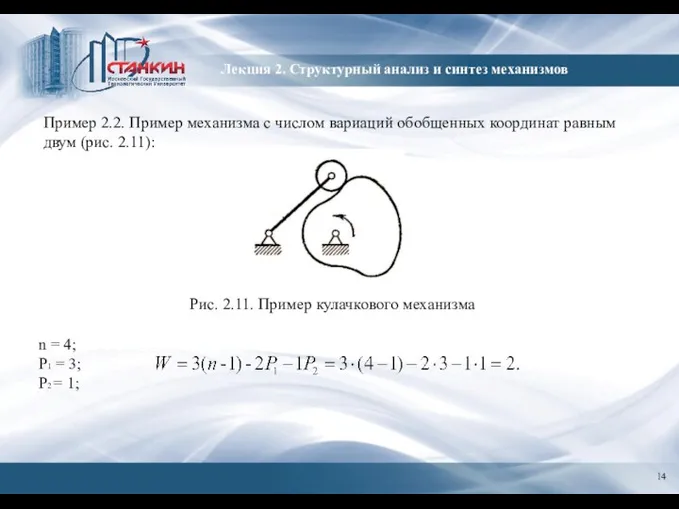
- 16. Лекция 2. Структурный анализ и синтез механизмов Пример 2.2. Пример механизма с числом вариаций обобщенных координат
- 17. Лекция 2. Структурный анализ и синтез механизмов 14
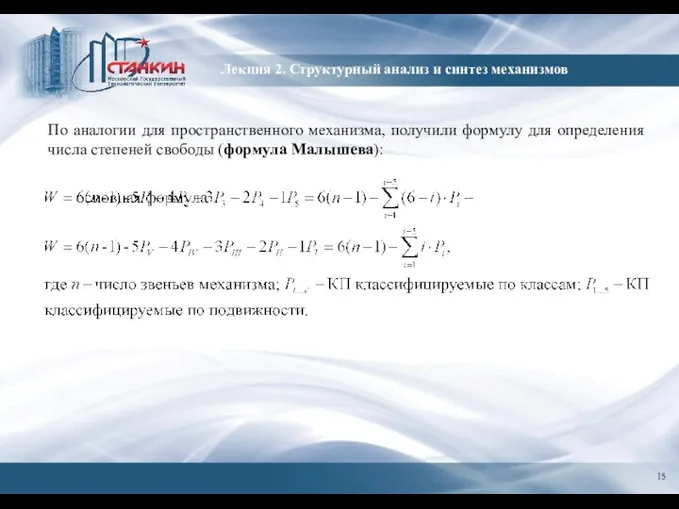
- 18. Лекция 2. Структурный анализ и синтез механизмов По аналогии для пространственного механизма, получили формулу для определения
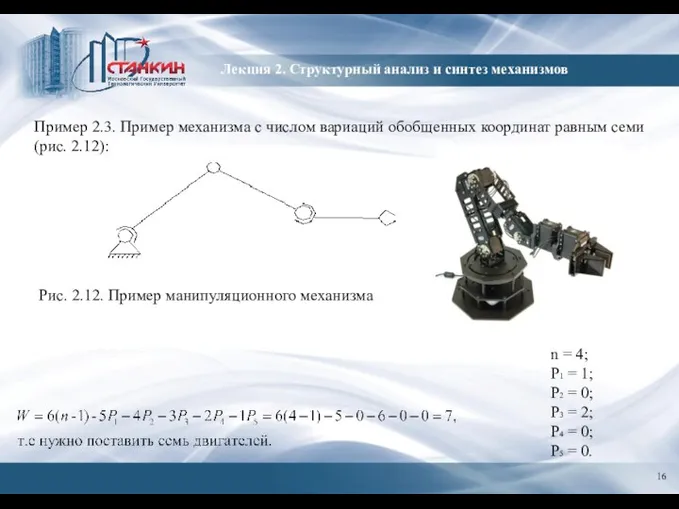
- 19. Лекция 2. Структурный анализ и синтез механизмов Пример 2.3. Пример механизма с числом вариаций обобщенных координат
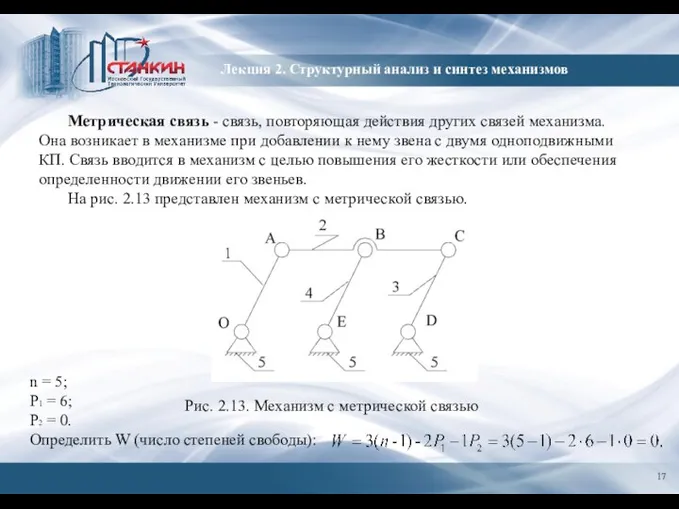
- 20. Лекция 2. Структурный анализ и синтез механизмов Метрическая связь - связь, повторяющая действия других связей механизма.
- 21. Лекция 2. Структурный анализ и синтез механизмов Этот механизм с нулевой подвижностью (ферма). Звено 4 с
- 23. Скачать презентацию
Слайд 2Лекция 2. Структурный анализ и синтез механизмов
Степень свободы – это возможность простейшего
Лекция 2. Структурный анализ и синтез механизмов
Степень свободы – это возможность простейшего
Слайд 3Лекция 2. Структурный анализ и синтез механизмов
Рис. 2.2. Степени свободы на плоскости
Лекция 2. Структурный анализ и синтез механизмов
Рис. 2.2. Степени свободы на плоскости
Слайд 4Лекция 2. Структурный анализ и синтез механизмов
Кинематические пары накладывают ограничение на возможные
Лекция 2. Структурный анализ и синтез механизмов
Кинематические пары накладывают ограничение на возможные
Слайд 5Лекция 2. Структурный анализ и синтез механизмов
Кинематические пары классифицируются по подвижностям -
Лекция 2. Структурный анализ и синтез механизмов
Кинематические пары классифицируются по подвижностям -
Слайд 6Лекция 2. Структурный анализ и синтез механизмов
Пятиподвижная кинематическая пара (5П) – кинематическая
Лекция 2. Структурный анализ и синтез механизмов
Пятиподвижная кинематическая пара (5П) – кинематическая
Слайд 7Лекция 2. Структурный анализ и синтез механизмов
Четырехподвижная кинематическая пара (4П) – кинематическая
Лекция 2. Структурный анализ и синтез механизмов
Четырехподвижная кинематическая пара (4П) – кинематическая
Слайд 8Лекция 2. Структурный анализ и синтез механизмов
Трехподвижная кинематическая пара (3П) –
Лекция 2. Структурный анализ и синтез механизмов
Трехподвижная кинематическая пара (3П) –
Слайд 9Лекция 2. Структурный анализ и синтез механизмов
Двухподвижная кинематическая пара (2П) –
Лекция 2. Структурный анализ и синтез механизмов
Двухподвижная кинематическая пара (2П) –
Слайд 10Одноподвижная кинематическая пара (1П) – кинематическая пара 5-го класса, допускает только лишь
Одноподвижная кинематическая пара (1П) – кинематическая пара 5-го класса, допускает только лишь
Слайд 11Лекция 2. Структурный анализ и синтез механизмов
10
Лекция 2. Структурный анализ и синтез механизмов
10
Слайд 12Число степеней свободы механизмов характеризует число двигателей необходимых для нормальной работы механизмов.
Число
Число степеней свободы механизмов характеризует число двигателей необходимых для нормальной работы механизмов.
Число
Слайд 13Лекция 2. Структурный анализ и синтез механизмов
Для определения ЧСС (W) механизма необходимо
Лекция 2. Структурный анализ и синтез механизмов
Для определения ЧСС (W) механизма необходимо
Слайд 14Пример 2.1. Пример механизма с числом вариаций обобщенных координат равным одному (рис.
Пример 2.1. Пример механизма с числом вариаций обобщенных координат равным одному (рис.
Слайд 15Лекция 2. Структурный анализ и синтез механизмов
13
Лекция 2. Структурный анализ и синтез механизмов
13
Слайд 16Лекция 2. Структурный анализ и синтез механизмов
Пример 2.2. Пример механизма с числом
Лекция 2. Структурный анализ и синтез механизмов
Пример 2.2. Пример механизма с числом
Слайд 17Лекция 2. Структурный анализ и синтез механизмов
14
Лекция 2. Структурный анализ и синтез механизмов
14
Слайд 18Лекция 2. Структурный анализ и синтез механизмов
По аналогии для пространственного механизма, получили
Лекция 2. Структурный анализ и синтез механизмов
По аналогии для пространственного механизма, получили
Слайд 19Лекция 2. Структурный анализ и синтез механизмов
Пример 2.3. Пример механизма с числом
Лекция 2. Структурный анализ и синтез механизмов
Пример 2.3. Пример механизма с числом
Слайд 20Лекция 2. Структурный анализ и синтез механизмов
Метрическая связь - связь, повторяющая действия
Лекция 2. Структурный анализ и синтез механизмов
Метрическая связь - связь, повторяющая действия
Слайд 21Лекция 2. Структурный анализ и синтез механизмов
Этот механизм с нулевой подвижностью (ферма).
Лекция 2. Структурный анализ и синтез механизмов
Этот механизм с нулевой подвижностью (ферма).
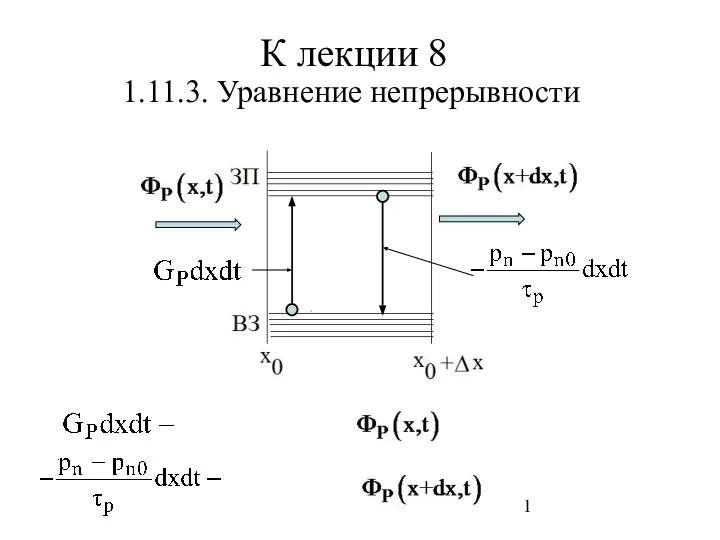 Уравнение непрерывности
Уравнение непрерывности Прозрачный люминесцентный солнечный концентратор
Прозрачный люминесцентный солнечный концентратор Расчет износа деталей транспортных средств
Расчет износа деталей транспортных средств Самолётные ответчики. Общие сведения о вторичной радиолокационной системе
Самолётные ответчики. Общие сведения о вторичной радиолокационной системе Индуктивные преобразователи перемещения
Индуктивные преобразователи перемещения Diagnostirovanie_i_TO_transmissii
Diagnostirovanie_i_TO_transmissii Оборудование понизительных подстанций
Оборудование понизительных подстанций Бабочка, электрон и космический ландшафт
Бабочка, электрон и космический ландшафт Молекуляр физика нигезләре
Молекуляр физика нигезләре Закон сохранения механической энергии
Закон сохранения механической энергии Сила трения. Виды трения. Способы изменения трения
Сила трения. Виды трения. Способы изменения трения Теоретические основы рабочего процесса турбомашин
Теоретические основы рабочего процесса турбомашин Импульс тела (количество движения)
Импульс тела (количество движения) задачи законы ньютона
задачи законы ньютона Каковы основные положения молекулярной теории строения вещества?
Каковы основные положения молекулярной теории строения вещества? Модульная конструкция двигателя Д-436-148 и её влияние на объём и качество технического обслуживания
Модульная конструкция двигателя Д-436-148 и её влияние на объём и качество технического обслуживания Магнитные свойства материалов
Магнитные свойства материалов Урок 22. Повторение. Законы Ньютона. Решение задач
Урок 22. Повторение. Законы Ньютона. Решение задач Презентация на тему Энергия топлива. Удельная теплота сгорания топлива
Презентация на тему Энергия топлива. Удельная теплота сгорания топлива  Поля и взаимодействия. Лекция 01. Введение
Поля и взаимодействия. Лекция 01. Введение Туннельный диод
Туннельный диод Энергия связи ядра. Ядерные реакции
Энергия связи ядра. Ядерные реакции Голография и ее применение
Голография и ее применение Трубчатый ферментёр
Трубчатый ферментёр 实验五 功率放大电路
实验五 功率放大电路 Механические колебания. Колебательные движения
Механические колебания. Колебательные движения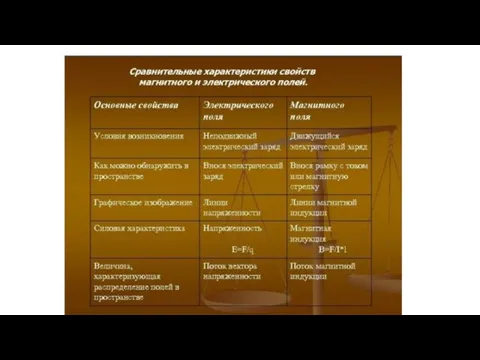 Сравнительная характеристика магнитного и электрического полей
Сравнительная характеристика магнитного и электрического полей Работа и мощность. Решение задач
Работа и мощность. Решение задач