- Расчёт кругового поворота автомобиля

Содержание
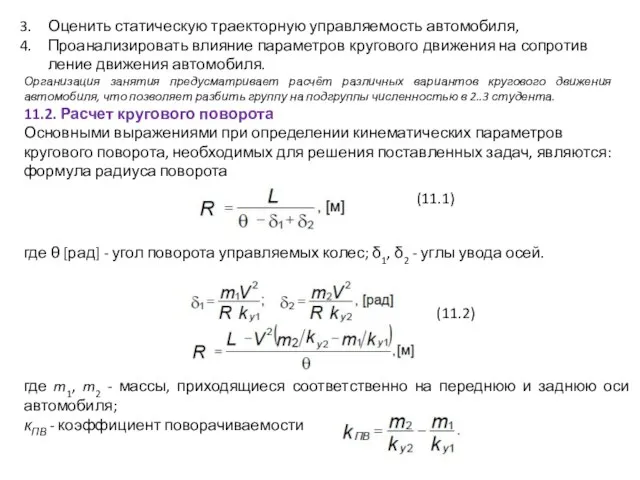
- 2. Оценить статическую траекторную управляемость автомобиля, Проанализировать влияние параметров кругового движения на сопротивление движения автомобиля. Организация занятия
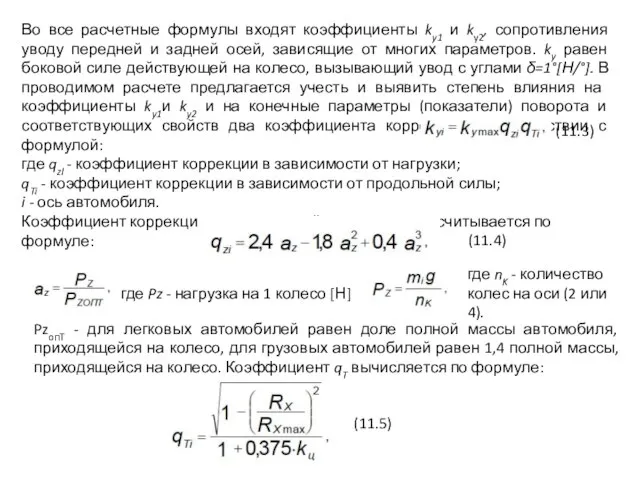
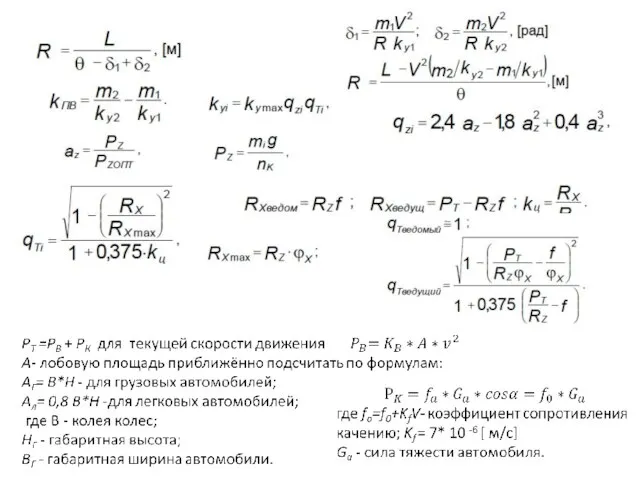
- 3. . Во все расчетные формулы входят коэффициенты ky1 и ky2, сопротивления уводу передней и задней осей,
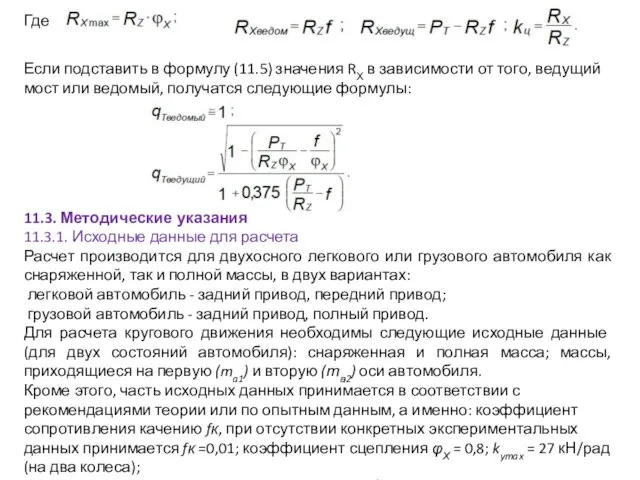
- 4. Где Если подставить в формулу (11.5) значения RХ в зависимости от того, ведущий мост или ведомый,
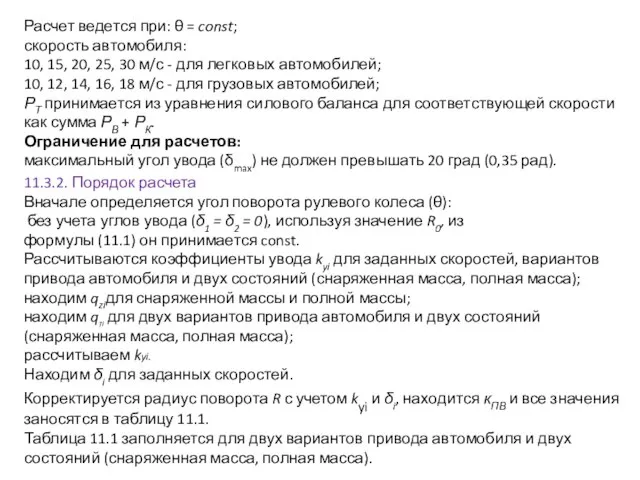
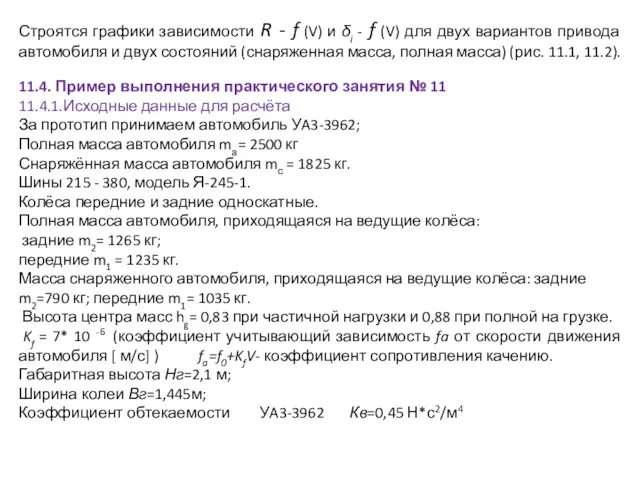
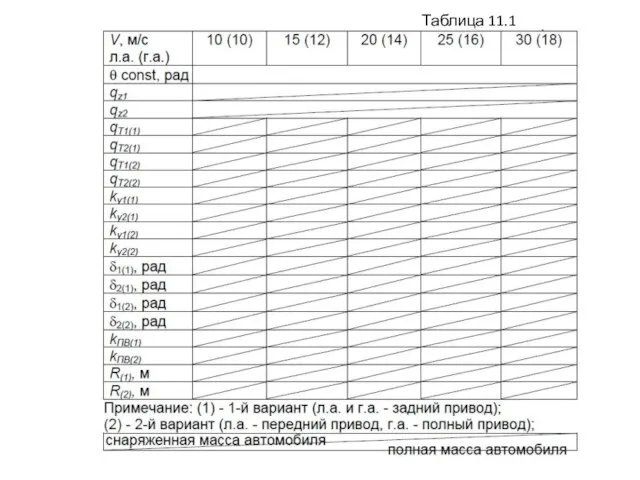
- 5. Расчет ведется при: θ = const; скорость автомобиля: 10, 15, 20, 25, 30 м/с - для
- 6. Строятся графики зависимости R - f (V) и δi - f (V) для двух вариантов привода
- 7. Таблица 11.1
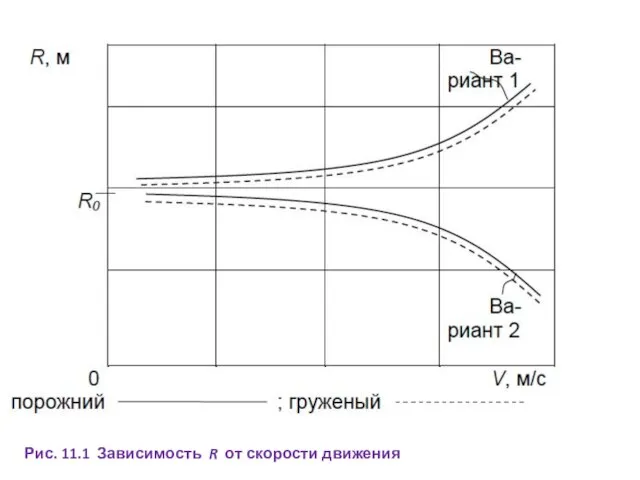
- 9. Рис. 11.1 Зависимость R от скорости движения
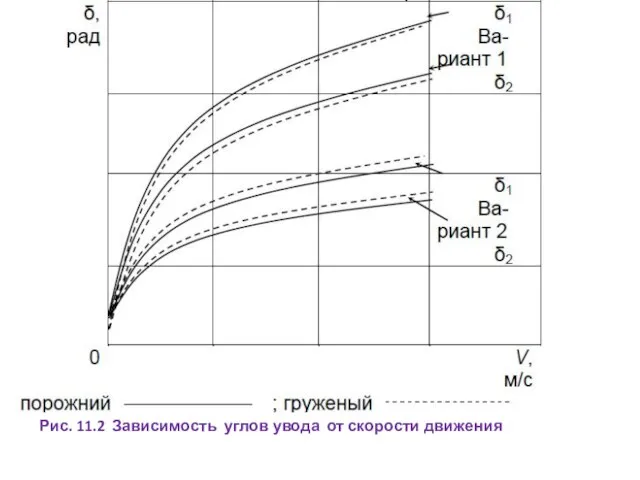
- 10. Рис. 11.2 Зависимость углов увода от скорости движения
- 12. Скачать презентацию
Слайд 2Оценить статическую траекторную управляемость автомобиля,
Проанализировать влияние параметров кругового движения на сопротивление движения
Оценить статическую траекторную управляемость автомобиля,
Проанализировать влияние параметров кругового движения на сопротивление движения
Слайд 3.
Во все расчетные формулы входят коэффициенты ky1 и ky2, сопротивления
.
Во все расчетные формулы входят коэффициенты ky1 и ky2, сопротивления
Слайд 4Где
Если подставить в формулу (11.5) значения RХ в зависимости от того, ведущий
Где
Если подставить в формулу (11.5) значения RХ в зависимости от того, ведущий
Слайд 5Расчет ведется при: θ = const;
скорость автомобиля:
10, 15, 20, 25, 30
Расчет ведется при: θ = const;
скорость автомобиля:
10, 15, 20, 25, 30
Слайд 6Строятся графики зависимости R - f (V) и δi - f (V)
Строятся графики зависимости R - f (V) и δi - f (V)
Слайд 7Таблица 11.1
Таблица 11.1
Слайд 9Рис. 11.1 Зависимость R от скорости движения
Рис. 11.1 Зависимость R от скорости движения
Слайд 10Рис. 11.2 Зависимость углов увода от скорости движения
Рис. 11.2 Зависимость углов увода от скорости движения
 Механическое движение
Механическое движение Передача электроэнергии от источника к потребителю
Передача электроэнергии от источника к потребителю Презентация на тему Изобретатель радио – А.С. Попов
Презентация на тему Изобретатель радио – А.С. Попов  Презентация на тему Элементарные частицы
Презентация на тему Элементарные частицы  Устройство для наматывания нижней нити на шпульку
Устройство для наматывания нижней нити на шпульку Основные понятия теории механизмов и машин
Основные понятия теории механизмов и машин Общие сведения о передачах. Лекция №4
Общие сведения о передачах. Лекция №4 Закон сохранения электрического заряда. Закон Кулона
Закон сохранения электрического заряда. Закон Кулона Общее устройство автомобиля
Общее устройство автомобиля Поверхностное натяжение
Поверхностное натяжение Назначение, классификация и конструкция колесных пар локомотива
Назначение, классификация и конструкция колесных пар локомотива Физическая картина мира. Плотность
Физическая картина мира. Плотность Как создать суперкар и решить задачи, возникающие при его создании
Как создать суперкар и решить задачи, возникающие при его создании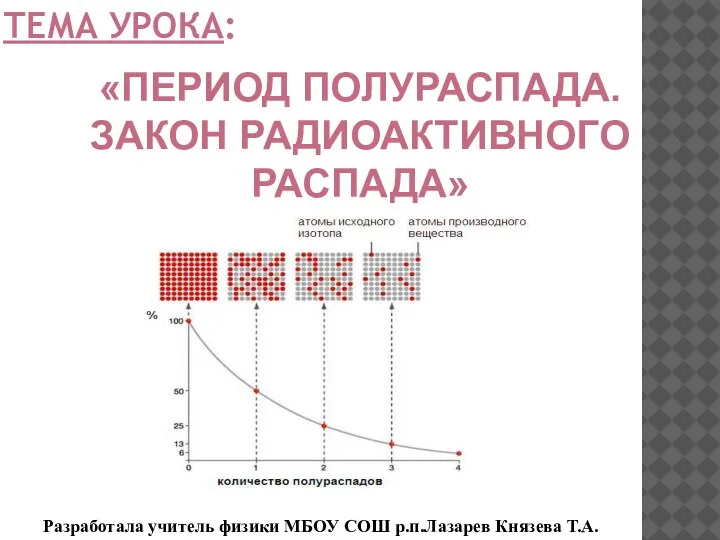 Закон радиоактивного распада. Период полураспада радиоактивных изотопов
Закон радиоактивного распада. Период полураспада радиоактивных изотопов Теория относительности. Релятивистская механика
Теория относительности. Релятивистская механика Температура и тепловое равновесие
Температура и тепловое равновесие Свойства веществ
Свойства веществ Резка металла слесарной ножовкой
Резка металла слесарной ножовкой Сила. Явление тяготения. Сила тяжести
Сила. Явление тяготения. Сила тяжести Замедляющие структуры
Замедляющие структуры Фотоэффект
Фотоэффект Технология рентгеновских трубок. (Лекция 6)
Технология рентгеновских трубок. (Лекция 6) Физика и познание мира
Физика и познание мира Сложение двух сил, направленных по одной прямой. Равнодействующая сила
Сложение двух сил, направленных по одной прямой. Равнодействующая сила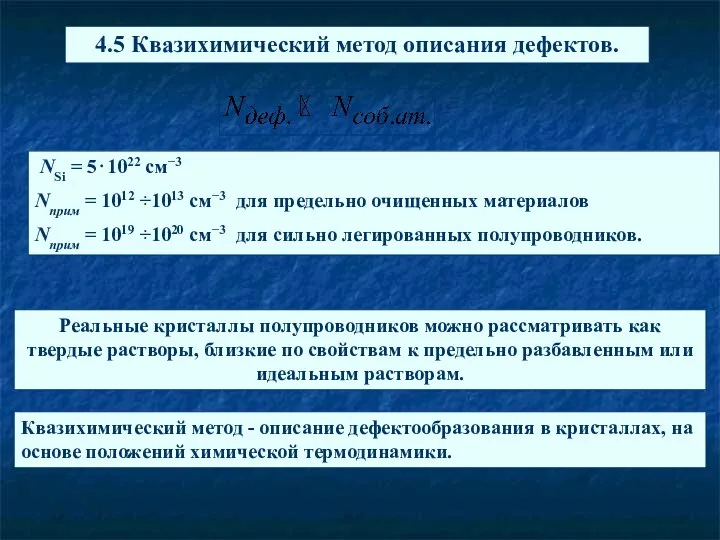 Квазихимический метод описания дефектов
Квазихимический метод описания дефектов Естественный способ задания движения
Естественный способ задания движения Терагерцовая спектроскопия металлических ансамблей частиц
Терагерцовая спектроскопия металлических ансамблей частиц Законы Ньютона
Законы Ньютона