- Statika

Содержание
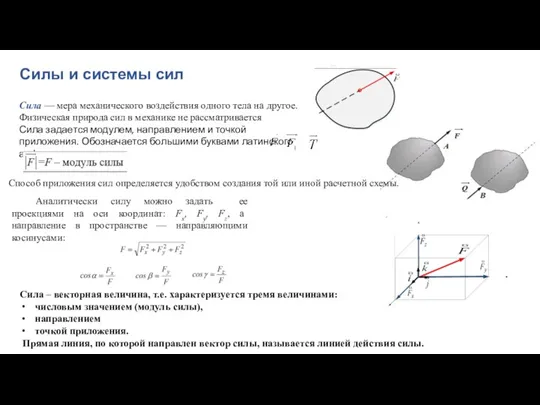
- 2. Силы и системы сил Сила — мера механического воздействия одного тела на другое. Физическая природа сил
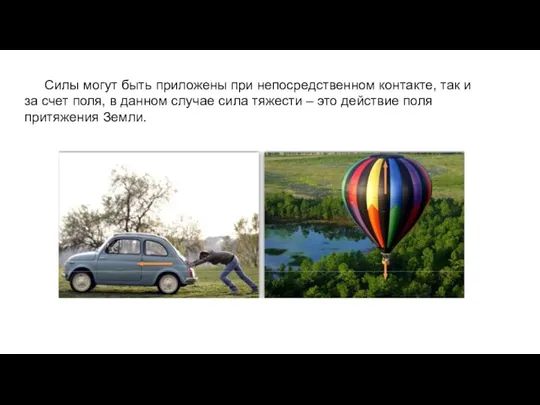
- 3. Силы могут быть приложены при непосредственном контакте, так и за счет поля, в данном случае сила
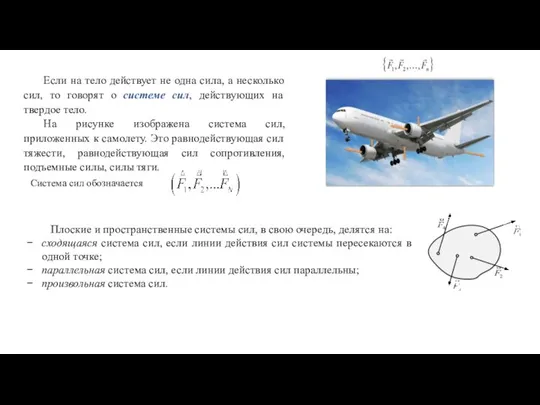
- 4. Если на тело действует не одна сила, а несколько сил, то говорят о системе сил, действующих
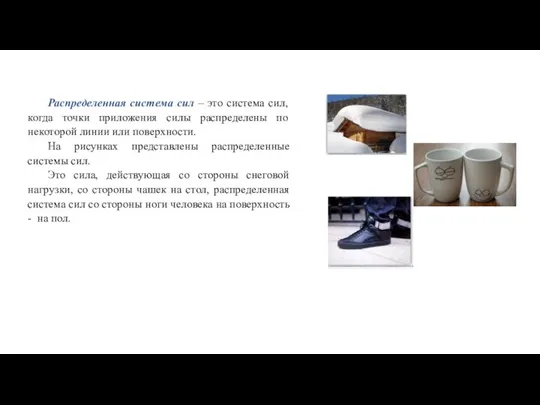
- 5. Распределенная система сил – это система сил, когда точки приложения силы распределены по некоторой линии или
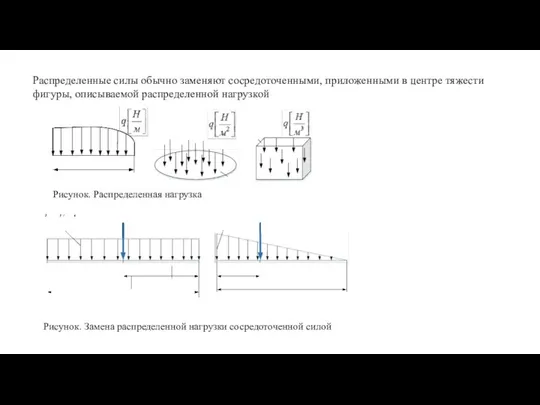
- 6. Распределенные силы обычно заменяют сосредоточенными, приложенными в центре тяжести фигуры, описываемой распределенной нагрузкой Рисунок. Распределенная нагрузка
- 7. Пример уравновешенной системы сил – известные герои басни Крылова: лебедь, рак и щука.
- 8. Свойства простейших систем сил В аксиомах статики формулируются те простейшие и общие законы, которым подчиняются силы,
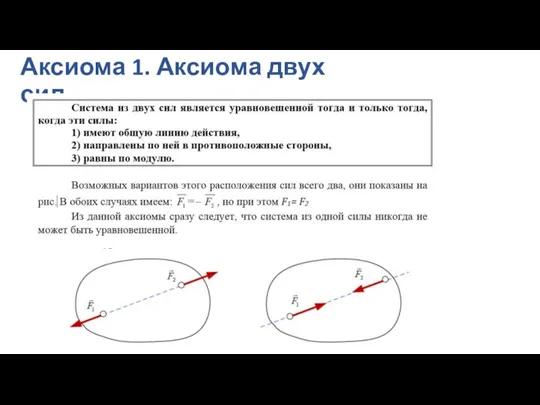
- 9. Аксиома 1. Аксиома двух сил
- 10. Аксиома 2. Аксиома эквивалентности систем сил Если среди действующих на тело сил есть взаимно уравновешивающие силы,
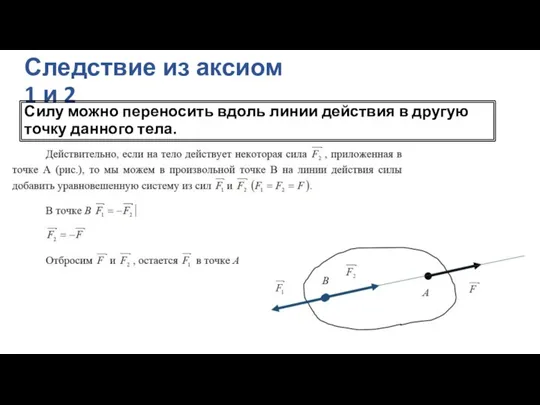
- 11. Следствие из аксиом 1 и 2 Силу можно переносить вдоль линии действия в другую точку данного
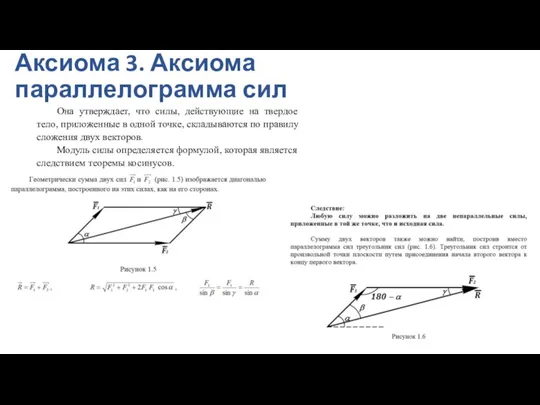
- 12. Аксиома 3. Аксиома параллелограмма сил Она утверждает, что силы, действующие на твердое тело, приложенные в одной
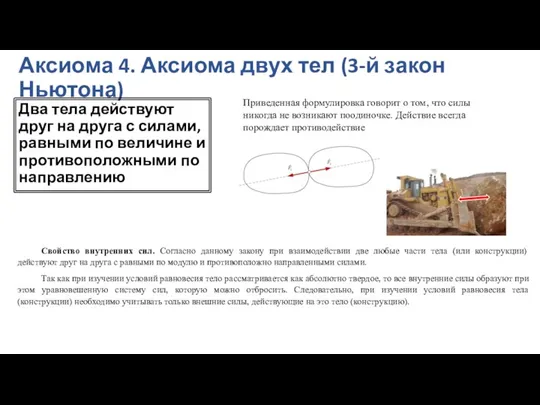
- 13. Аксиома 4. Аксиома двух тел (3-й закон Ньютона) Два тела действуют друг на друга с силами,
- 14. Аксиома 5. Аксиома затвердевания Если деформируемое тело находится в равновесии, то равновесие не нарушается при его
- 15. Связи и реакции связей Свободное тело – тело, которое может совершать из данного положения любые перемещения
- 16. Тело, стремясь под действием приложенных сил осуществить перемещение, которому препятствует связь, будет действовать на нее с
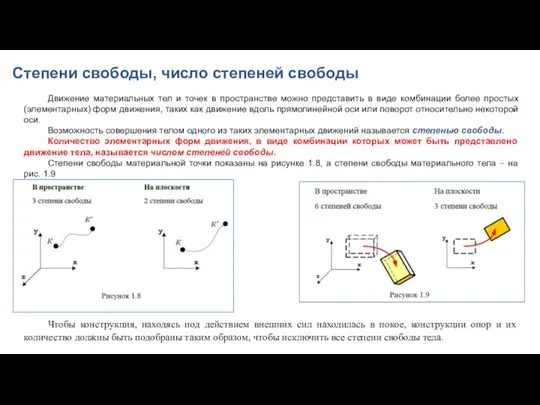
- 17. Степени свободы, число степеней свободы Движение материальных тел и точек в пространстве можно представить в виде
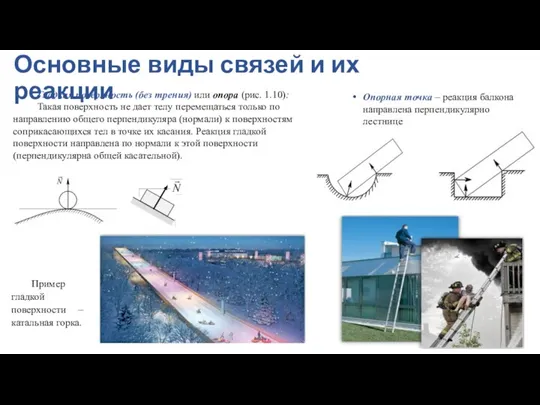
- 18. Основные виды связей и их реакции Гладкая поверхность (без трения) или опора (рис. 1.10): Такая поверхность
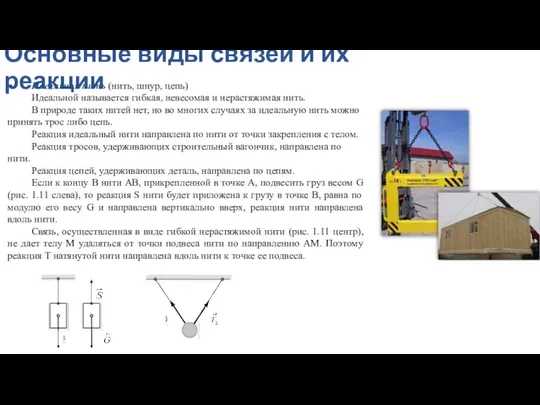
- 19. Основные виды связей и их реакции Идеальная нить (нить, шнур, цепь) Идеальной называется гибкая, невесомая и
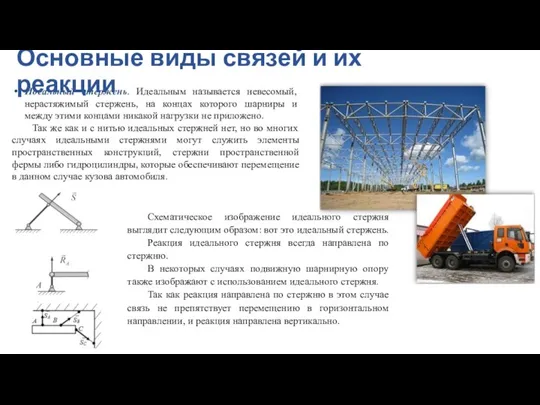
- 20. Идеальный стержень. Идеальным называется невесомый, нерастяжимый стержень, на концах которого шарниры и между этими концами никакой
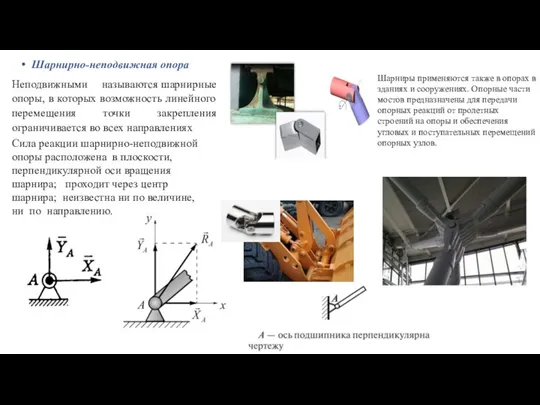
- 21. Шарнирно-неподвижная опора Неподвижными называются шарнирные опоры, в которых возможность линейного перемещения точки закрепления ограничивается во всех
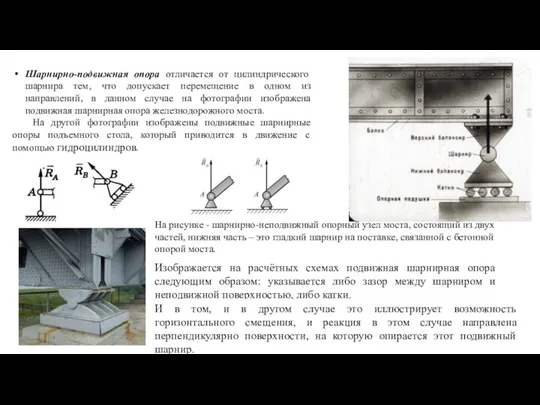
- 22. Шарнирно-подвижная опора отличается от цилиндрического шарнира тем, что допускает перемещение в одном из направлений, в данном
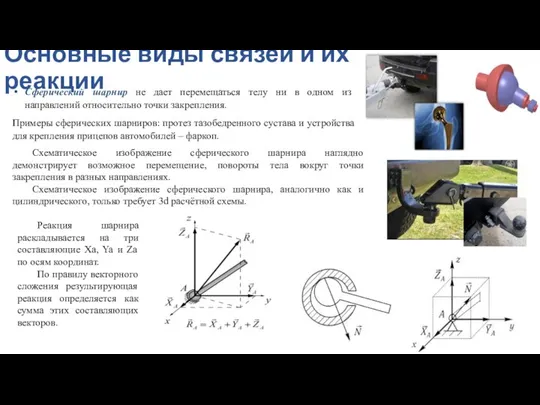
- 23. Основные виды связей и их реакции Сферический шарнир не дает перемещаться телу ни в одном из
- 24. Подпятник: эта связь, аналогично сферическому шарниру, не дает перемещаться точке закрепления в нижнюю полуплоскость. Используются подпятники
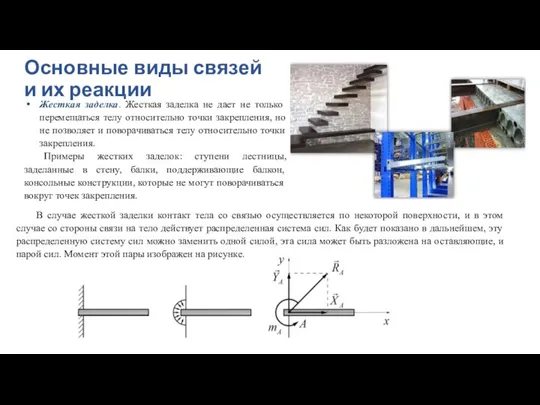
- 25. Основные виды связей и их реакции Жесткая заделка. Жесткая заделка не дает не только перемещаться телу
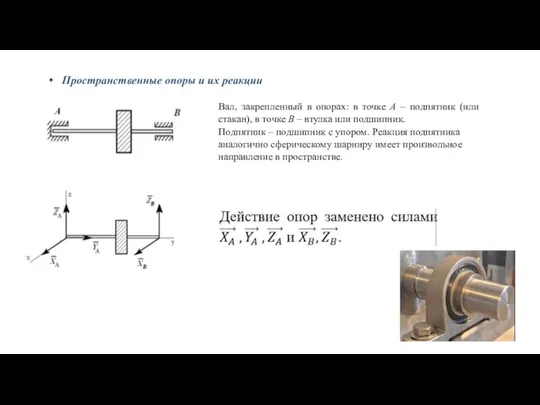
- 26. Пространственные опоры и их реакции Вал, закрепленный в опорах: в точке A – подпятник (или стакан),
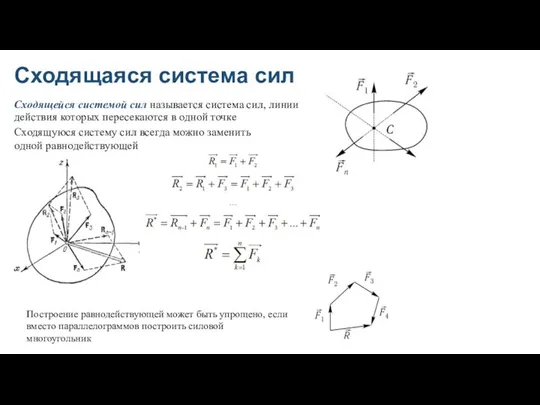
- 27. Сходящаяся система сил Сходящейся системой сил называется система сил, линии действия которых пересекаются в одной точке
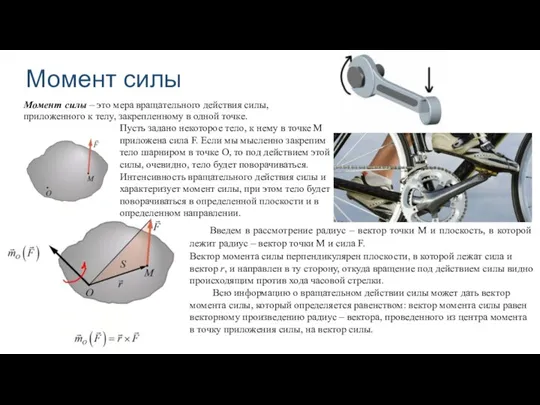
- 28. Момент силы Момент силы – это мера вращательного действия силы, приложенного к телу, закрепленному в одной
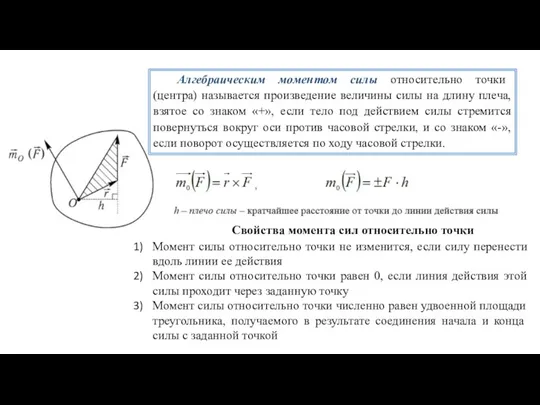
- 29. Свойства момента сил относительно точки Момент силы относительно точки не изменится, если силу перенести вдоль линии
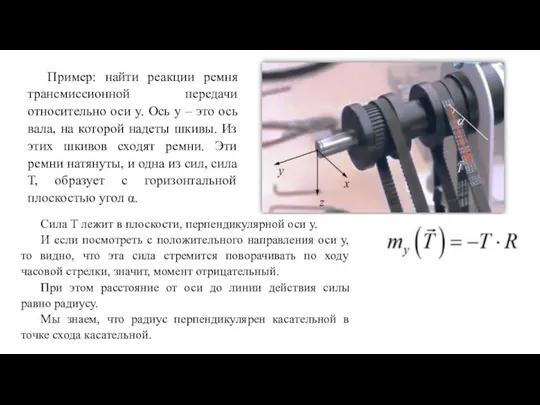
- 30. Пример: найти реакции ремня трансмиссионной передачи относительно оси y. Ось y – это ось вала, на
- 31. Пара сил. Теория пар сил, расположенных в одной плоскости Парой сил называют совокупность двух равных по
- 32. , Сила, равная геометрической сумме всех сил системы, называется главным вектором системы.
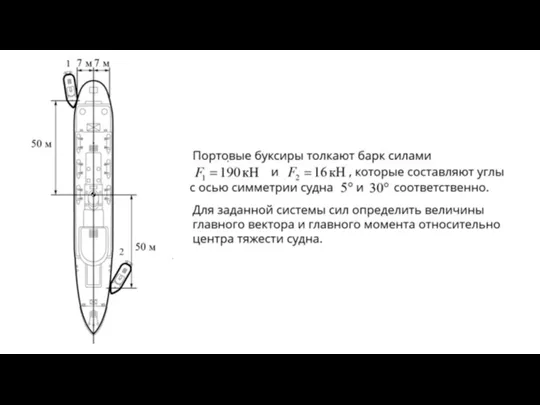
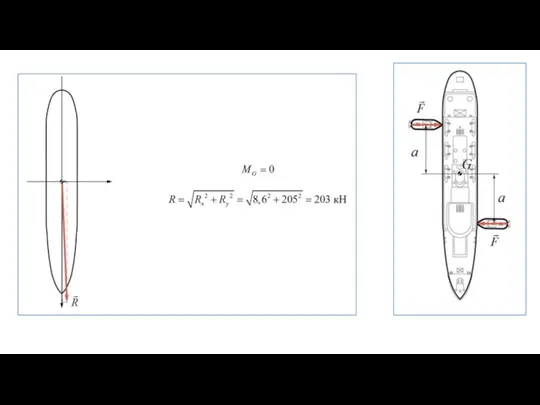
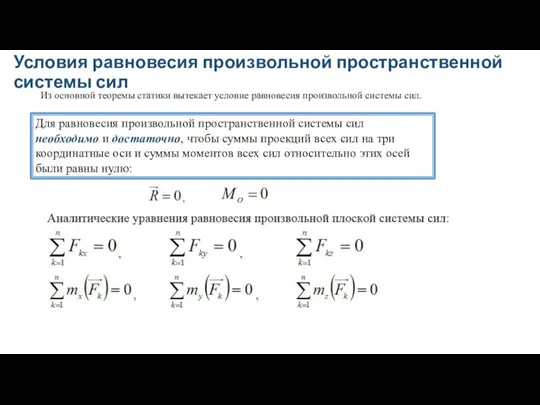
- 36. Условия равновесия произвольной пространственной системы сил Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы
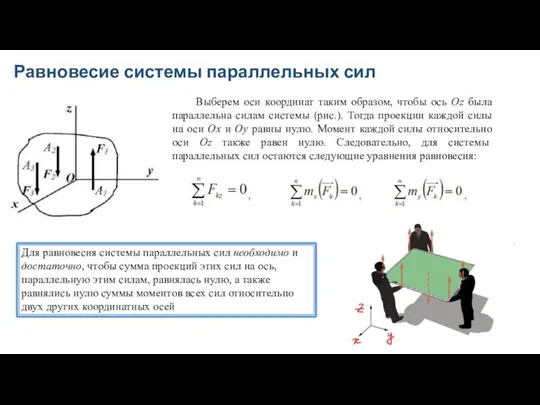
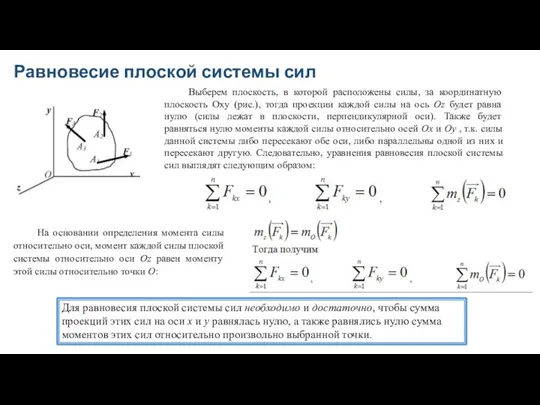
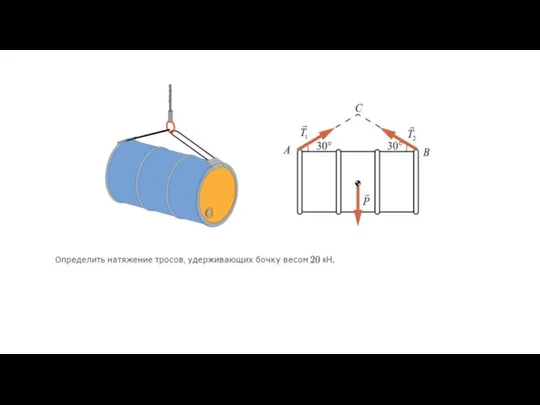
- 37. Равновесие системы параллельных сил Для равновесия системы параллельных сил необходимо и достаточно, чтобы сумма проекций этих
- 38. Равновесие плоской системы сил Для равновесия плоской системы сил необходимо и достаточно, чтобы сумма проекций этих
- 39. Связью для крана является шарнир в точке А и идеальный стержень, который удерживает кран в точке
- 40. Для тела, находящегося в равновесии под действием произвольно плоской системы сил, можно составить 3 уравнения равновесия.
- 44. Скачать презентацию
Слайд 3Силы могут быть приложены при непосредственном контакте, так и за счет поля,
Силы могут быть приложены при непосредственном контакте, так и за счет поля,
Слайд 4Если на тело действует не одна сила, а несколько сил, то говорят
Если на тело действует не одна сила, а несколько сил, то говорят
Слайд 5Распределенная система сил – это система сил, когда точки приложения силы распределены
Распределенная система сил – это система сил, когда точки приложения силы распределены
Слайд 6Распределенные силы обычно заменяют сосредоточенными, приложенными в центре тяжести фигуры, описываемой распределенной
Распределенные силы обычно заменяют сосредоточенными, приложенными в центре тяжести фигуры, описываемой распределенной
Слайд 7Пример уравновешенной системы сил – известные герои басни Крылова: лебедь, рак и
Пример уравновешенной системы сил – известные герои басни Крылова: лебедь, рак и
Слайд 8Свойства простейших систем сил
В аксиомах статики формулируются те простейшие и общие законы,
Свойства простейших систем сил
В аксиомах статики формулируются те простейшие и общие законы,
Слайд 9Аксиома 1. Аксиома двух сил
Аксиома 1. Аксиома двух сил
Слайд 10Аксиома 2. Аксиома эквивалентности систем сил
Если среди действующих на тело сил есть
Аксиома 2. Аксиома эквивалентности систем сил
Если среди действующих на тело сил есть
Слайд 11Следствие из аксиом 1 и 2
Силу можно переносить вдоль линии действия в
Следствие из аксиом 1 и 2
Силу можно переносить вдоль линии действия в
Слайд 12Аксиома 3. Аксиома параллелограмма сил
Она утверждает, что силы, действующие на твердое тело,
Аксиома 3. Аксиома параллелограмма сил
Она утверждает, что силы, действующие на твердое тело,
Слайд 13Аксиома 4. Аксиома двух тел (3-й закон Ньютона)
Два тела действуют друг на
Аксиома 4. Аксиома двух тел (3-й закон Ньютона)
Два тела действуют друг на
Слайд 14Аксиома 5. Аксиома затвердевания
Если деформируемое тело находится в равновесии, то равновесие не
Аксиома 5. Аксиома затвердевания
Если деформируемое тело находится в равновесии, то равновесие не
Слайд 15Связи и реакции связей
Свободное тело – тело, которое может совершать из
Связи и реакции связей
Свободное тело – тело, которое может совершать из
Слайд 16Тело, стремясь под действием приложенных сил осуществить перемещение, которому препятствует связь, будет
Тело, стремясь под действием приложенных сил осуществить перемещение, которому препятствует связь, будет
Слайд 17Степени свободы, число степеней свободы
Движение материальных тел и точек в пространстве
Степени свободы, число степеней свободы
Движение материальных тел и точек в пространстве
Слайд 18Основные виды связей и их реакции
Гладкая поверхность (без трения) или опора (рис.
Основные виды связей и их реакции
Гладкая поверхность (без трения) или опора (рис.
Слайд 19Основные виды связей и их реакции
Идеальная нить (нить, шнур, цепь)
Идеальной называется гибкая,
Основные виды связей и их реакции
Идеальная нить (нить, шнур, цепь)
Идеальной называется гибкая,
Слайд 20Идеальный стержень. Идеальным называется невесомый, нерастяжимый стержень, на концах которого шарниры и
Идеальный стержень. Идеальным называется невесомый, нерастяжимый стержень, на концах которого шарниры и
Слайд 21Шарнирно-неподвижная опора
Неподвижными называются шарнирные опоры, в которых возможность линейного перемещения точки закрепления ограничивается
Шарнирно-неподвижная опора
Неподвижными называются шарнирные опоры, в которых возможность линейного перемещения точки закрепления ограничивается
Слайд 22Шарнирно-подвижная опора отличается от цилиндрического шарнира тем, что допускает перемещение в одном
Шарнирно-подвижная опора отличается от цилиндрического шарнира тем, что допускает перемещение в одном
Слайд 23Основные виды связей и их реакции
Сферический шарнир не дает перемещаться телу ни
Основные виды связей и их реакции
Сферический шарнир не дает перемещаться телу ни
Слайд 24Подпятник: эта связь, аналогично сферическому шарниру, не дает перемещаться точке закрепления в
Подпятник: эта связь, аналогично сферическому шарниру, не дает перемещаться точке закрепления в

Слайд 25Основные виды связей и их реакции
Жесткая заделка. Жесткая заделка не дает не
Основные виды связей и их реакции
Жесткая заделка. Жесткая заделка не дает не
Слайд 26Пространственные опоры и их реакции
Вал, закрепленный в опорах: в точке A –
Пространственные опоры и их реакции
Вал, закрепленный в опорах: в точке A –
Слайд 27Сходящаяся система сил
Сходящейся системой сил называется система сил, линии действия которых
Сходящаяся система сил
Сходящейся системой сил называется система сил, линии действия которых
Слайд 28Момент силы
Момент силы – это мера вращательного действия силы, приложенного к телу,
Момент силы
Момент силы – это мера вращательного действия силы, приложенного к телу,
Слайд 29Свойства момента сил относительно точки
Момент силы относительно точки не изменится, если силу
Свойства момента сил относительно точки
Момент силы относительно точки не изменится, если силу
Слайд 30Пример: найти реакции ремня трансмиссионной передачи относительно оси y. Ось y –
Пример: найти реакции ремня трансмиссионной передачи относительно оси y. Ось y –
Слайд 31Пара сил. Теория пар сил, расположенных в одной плоскости
Парой сил называют совокупность
Пара сил. Теория пар сил, расположенных в одной плоскости
Парой сил называют совокупность

Слайд 32
,
Сила, равная геометрической сумме всех сил системы, называется главным вектором системы.
,
Сила, равная геометрической сумме всех сил системы, называется главным вектором системы.


Слайд 36Условия равновесия произвольной пространственной системы сил
Для равновесия произвольной пространственной системы сил необходимо
Условия равновесия произвольной пространственной системы сил
Для равновесия произвольной пространственной системы сил необходимо
Слайд 37Равновесие системы параллельных сил
Для равновесия системы параллельных сил необходимо и достаточно, чтобы
Равновесие системы параллельных сил
Для равновесия системы параллельных сил необходимо и достаточно, чтобы
Слайд 38Равновесие плоской системы сил
Для равновесия плоской системы сил необходимо и достаточно, чтобы
Равновесие плоской системы сил
Для равновесия плоской системы сил необходимо и достаточно, чтобы
Слайд 39Связью для крана является шарнир в точке А и идеальный стержень, который
Связью для крана является шарнир в точке А и идеальный стержень, который
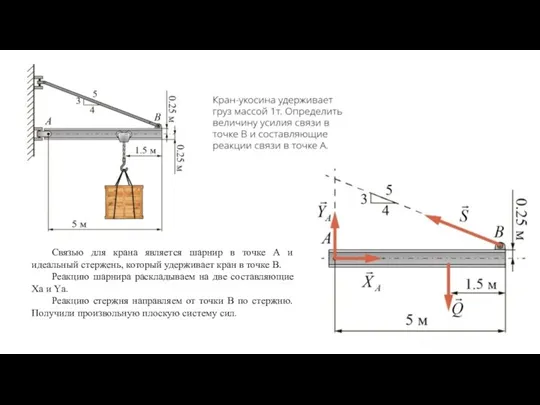
Слайд 40Для тела, находящегося в равновесии под действием произвольно плоской системы сил, можно
Для тела, находящегося в равновесии под действием произвольно плоской системы сил, можно


 Рычаги в технике, быту и природе. Применение закона равновесия рычага к блоку
Рычаги в технике, быту и природе. Применение закона равновесия рычага к блоку Применение переменного тока. (Лекция 9)
Применение переменного тока. (Лекция 9) ППШ
ППШ Контроль – измерительные приборы и автоматика (для операторов ТХУ)
Контроль – измерительные приборы и автоматика (для операторов ТХУ) Рух тіла під дією кількох сил
Рух тіла під дією кількох сил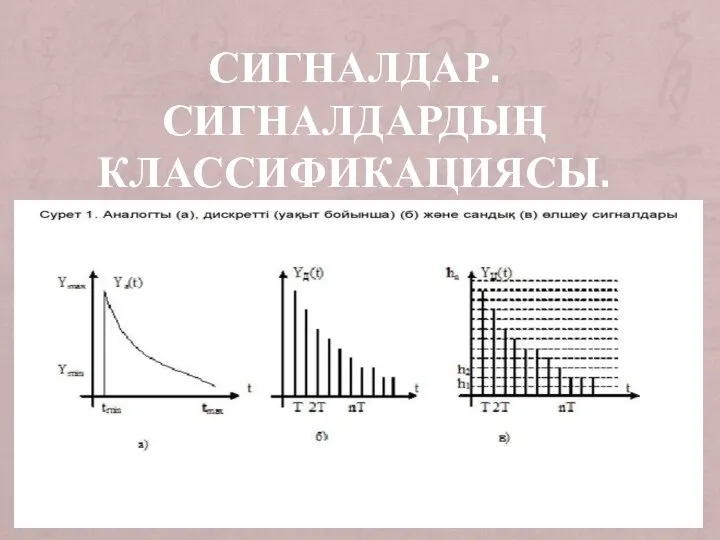 Сигналдар. Сигналдардың классификациясы
Сигналдар. Сигналдардың классификациясы Движение молекул
Движение молекул Презентация на тему Изобретение радио А.С. Поповым
Презентация на тему Изобретение радио А.С. Поповым  Вакуумная, компрессорная техника и пневмосистемы
Вакуумная, компрессорная техника и пневмосистемы Фотоэффект. Законы фотоэффекта. Завершение классической физики
Фотоэффект. Законы фотоэффекта. Завершение классической физики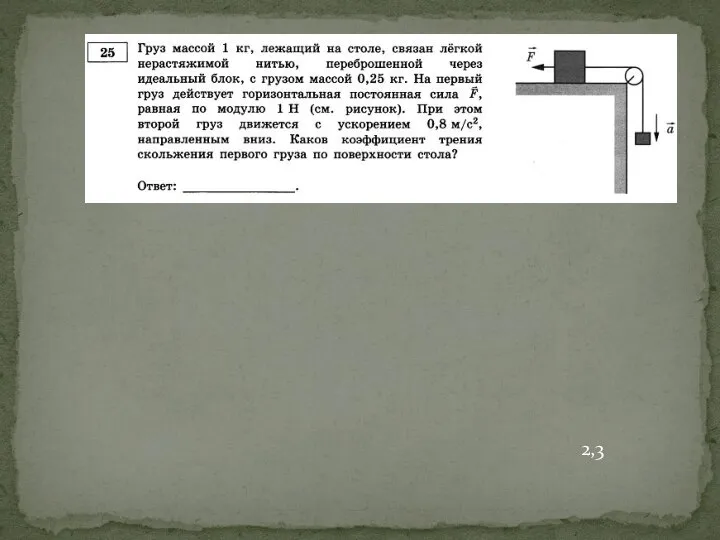 Подготовка к ЕГЭ. Решение задач
Подготовка к ЕГЭ. Решение задач Движение в неинерциальных системах отсчёта
Движение в неинерциальных системах отсчёта Сила трения
Сила трения Гидрогазодинамика. Потери напора на местных гидравлических сопротивлениях. Лекция 3
Гидрогазодинамика. Потери напора на местных гидравлических сопротивлениях. Лекция 3 Муфты насоса
Муфты насоса Решение задач на расчет количества теплоты
Решение задач на расчет количества теплоты Презентация на тему Кинетическая и потенциальная энергия
Презентация на тему Кинетическая и потенциальная энергия  Полупроводниковые теплоэлектрогенераторы
Полупроводниковые теплоэлектрогенераторы Применение полярных координат для определения местоположения материальной точки
Применение полярных координат для определения местоположения материальной точки Пословицы и поговорки о законах механики
Пословицы и поговорки о законах механики Структурный анализ и синтез механизмов. Лекция 2
Структурный анализ и синтез механизмов. Лекция 2 Дефлектор
Дефлектор Спектральный анализ
Спектральный анализ Баллистика. Повторение. Равномерное движение
Баллистика. Повторение. Равномерное движение Оценка параметров движения при зондировании последовательностью оптических импульсов
Оценка параметров движения при зондировании последовательностью оптических импульсов Тема: «Энергосбережение в быту» Авторы: Петрова Полина, 8 класс Уронов Дмитрий, 8 класс Руководитель: Патлай Яна Вячесл
Тема: «Энергосбережение в быту» Авторы: Петрова Полина, 8 класс Уронов Дмитрий, 8 класс Руководитель: Патлай Яна Вячесл Изучение механизмов и их работа Тема: Повторение тем
Изучение механизмов и их работа Тема: Повторение тем Большой адронный коллайдер
Большой адронный коллайдер