- Статика. Абсолютно твердое тело

Содержание
- 2. Статикой называется раздел механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных
- 3. Абсолютно твердое тело – это тело, которое ни при каких условиях не может деформироваться и любые
- 4. Сила как величина векторная характеризуется модулем, направлением в пространстве и точкой приложения Результат действия силы на
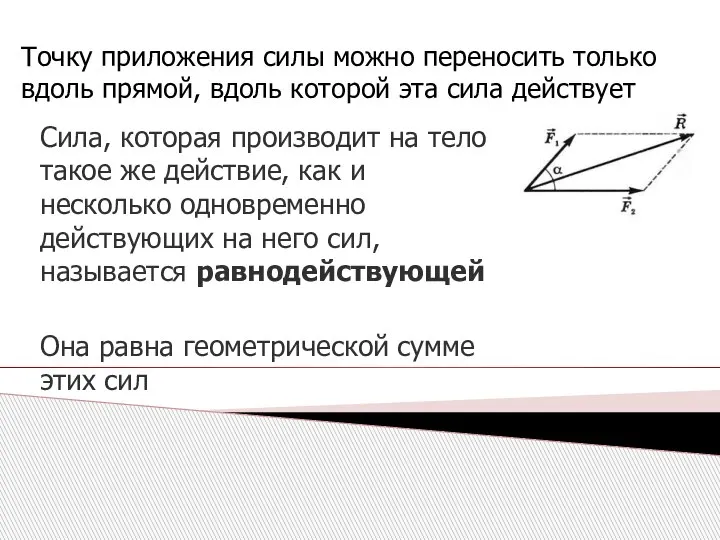
- 5. Точку приложения силы можно переносить только вдоль прямой, вдоль которой эта сила действует Сила, которая производит
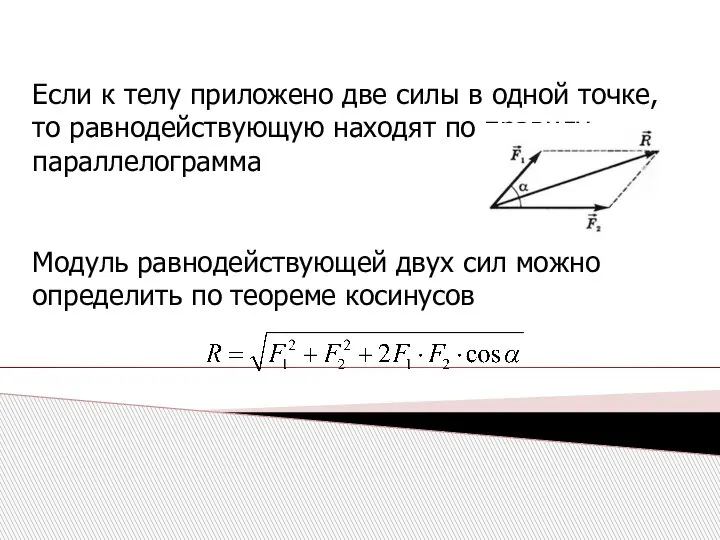
- 6. Если к телу приложено две силы в одной точке, то равнодействующую находят по правилу параллелограмма Модуль
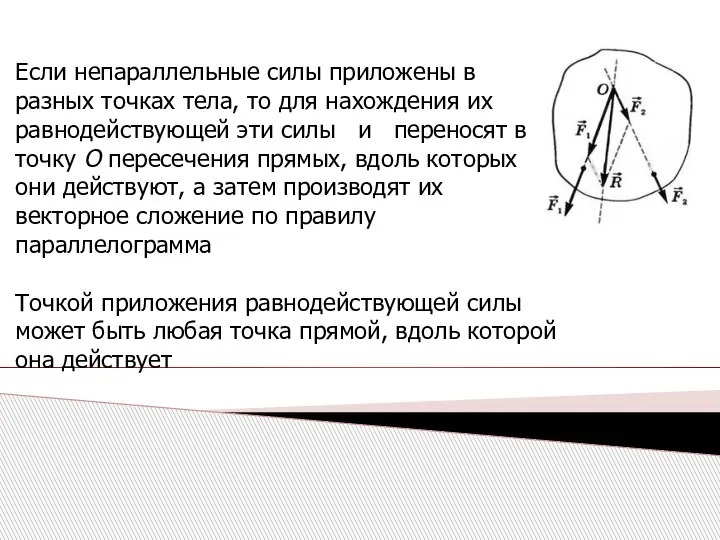
- 7. Если непараллельные силы приложены в разных точках тела, то для нахождения их равнодействующей эти силы и
- 8. Условие равновесия тела, не имеющего оси вращения Условие равновесия такого тела, как и условие равновесия материальной
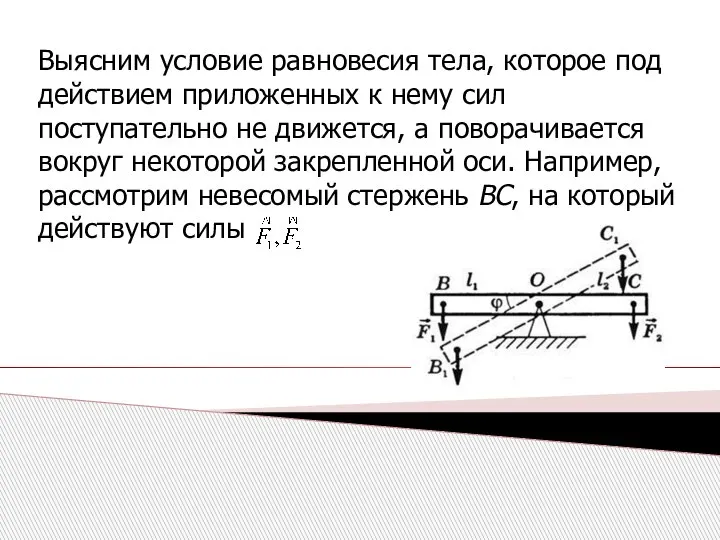
- 9. Выясним условие равновесия тела, которое под действием приложенных к нему сил поступательно не движется, а поворачивается
- 10. Повернем его на небольшой угол φ вокруг оси О. При этом точки приложения сил F⃗1 и
- 11. Эти силы совершают работу: Произведение силы на ее плечо называют моментом силы относительно оси вращения: Момент
- 12. Суммарная работа, совершаемая силами F1 и F2, составляет На основании теоремы о кинетической энергии ΔWk =
- 13. Условия равновесия твердого тела В общем случае, если тело под действием приложенных к нему сил может
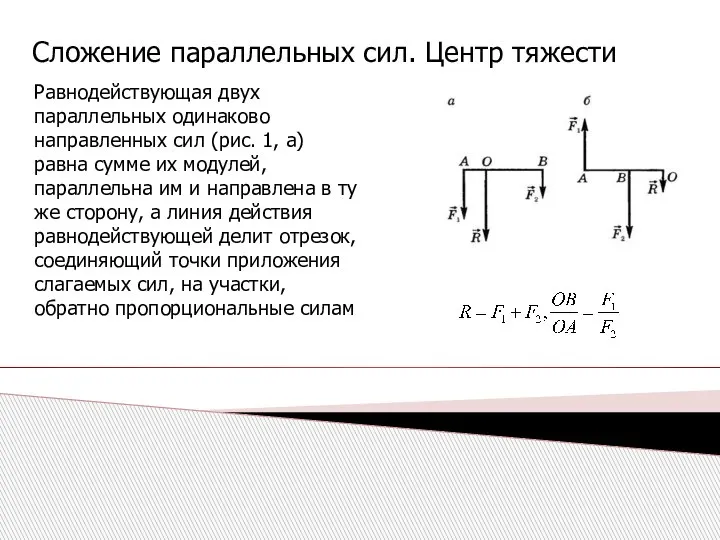
- 14. Сложение параллельных сил. Центр тяжести Равнодействующая двух параллельных одинаково направленных сил (рис. 1, а) равна сумме
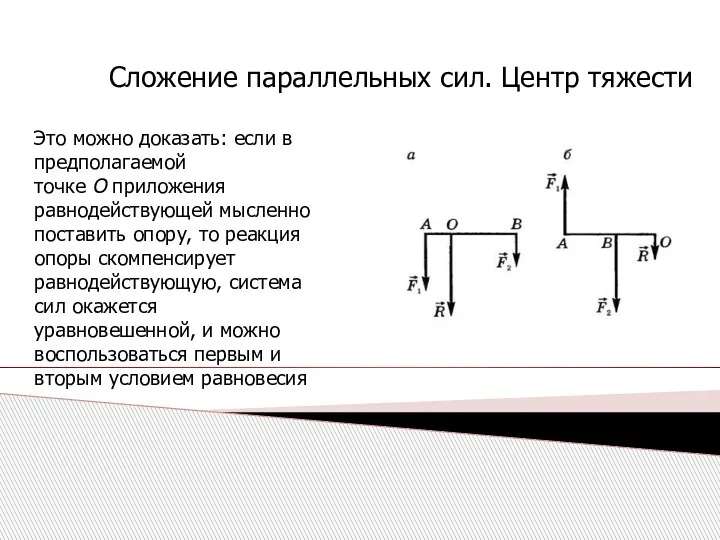
- 15. Сложение параллельных сил. Центр тяжести Это можно доказать: если в предполагаемой точке О приложения равнодействующей мысленно
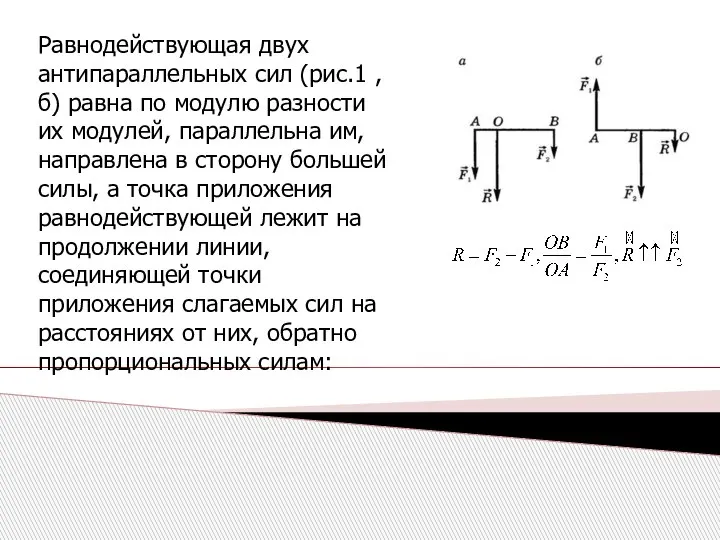
- 16. Равнодействующая двух антипараллельных сил (рис.1 , б) равна по модулю разности их модулей, параллельна им, направлена
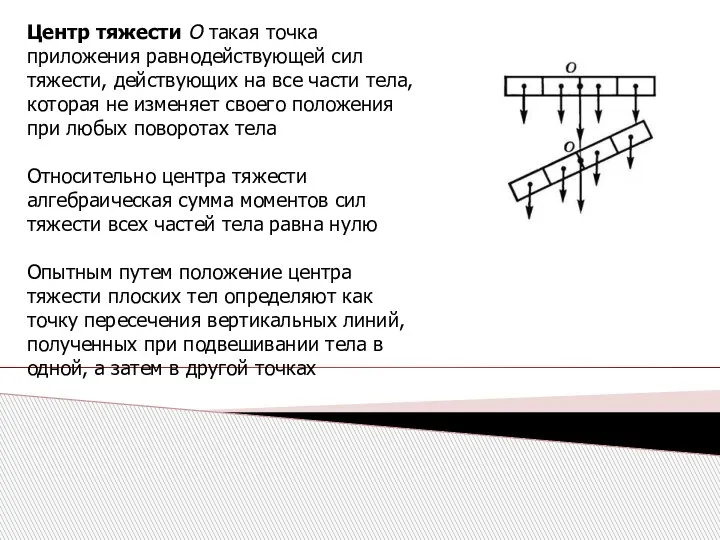
- 18. Центр тяжести О такая точка приложения равнодействующей сил тяжести, действующих на все части тела, которая не
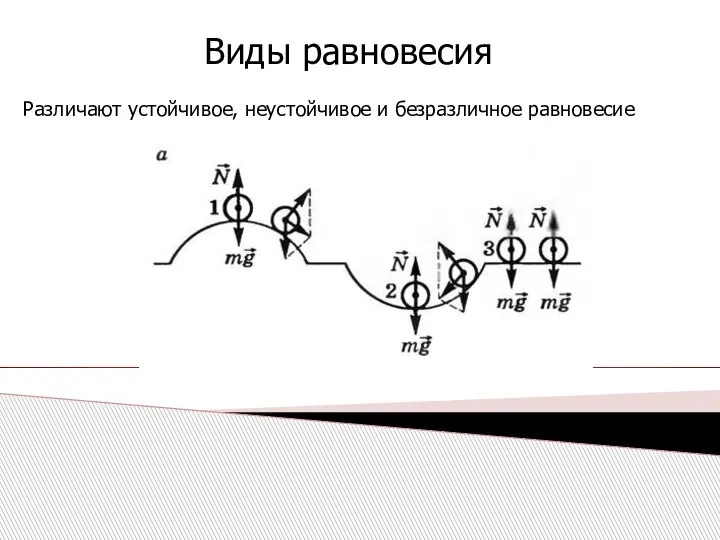
- 19. Виды равновесия Различают устойчивое, неустойчивое и безразличное равновесие
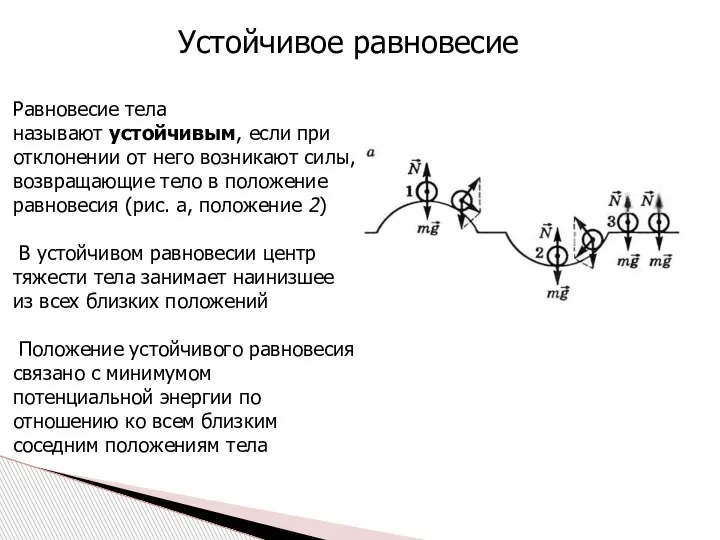
- 20. Равновесие тела называют устойчивым, если при отклонении от него возникают силы, возвращающие тело в положение равновесия
- 21. Равновесие тела называют неустойчивым, если при самом незначительном отклонении от него равнодействующая действующих на тело сил
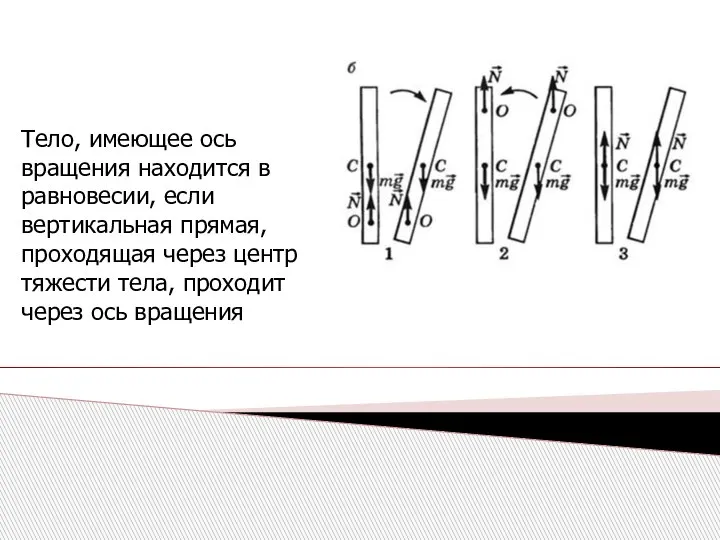
- 22. Тело, имеющее ось вращения находится в равновесии, если вертикальная прямая, проходящая через центр тяжести тела, проходит
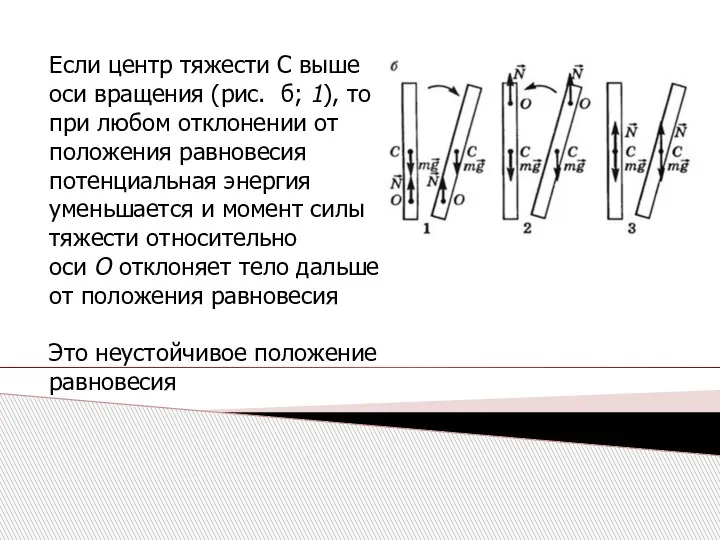
- 23. Если центр тяжести С выше оси вращения (рис. б; 1), то при любом отклонении от положения
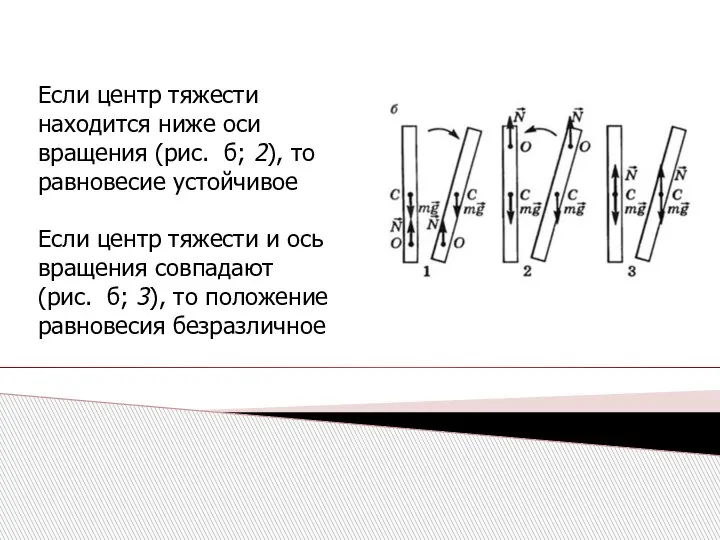
- 24. Если центр тяжести находится ниже оси вращения (рис. б; 2), то равновесие устойчивое Если центр тяжести
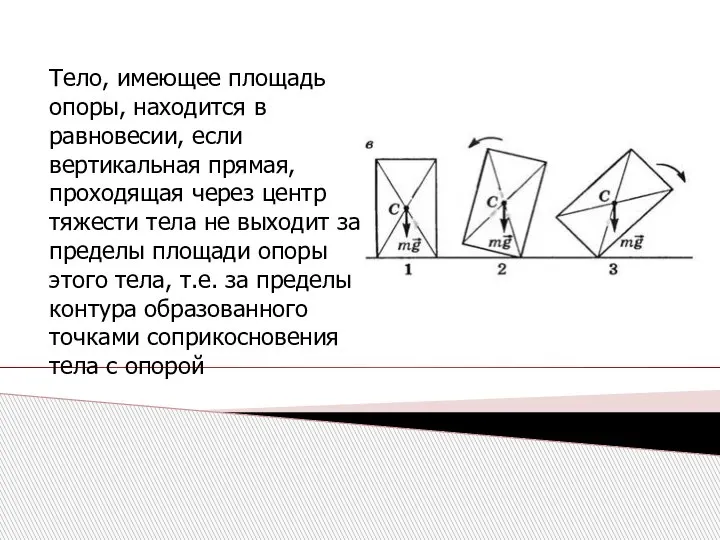
- 25. Тело, имеющее площадь опоры, находится в равновесии, если вертикальная прямая, проходящая через центр тяжести тела не
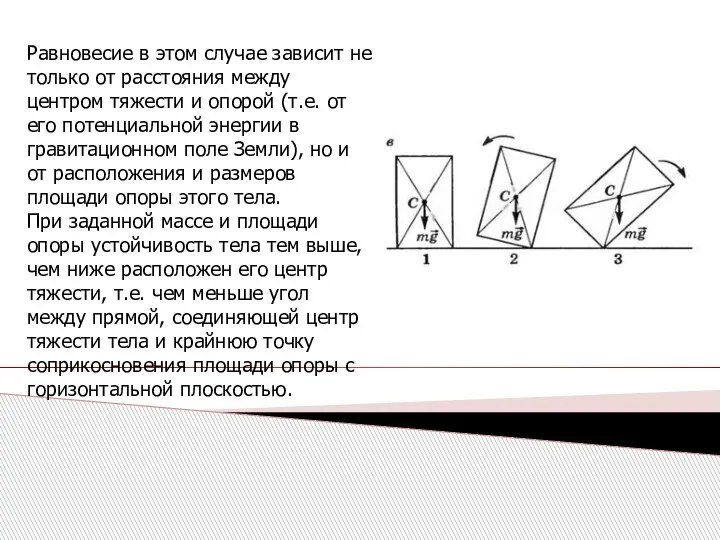
- 26. Равновесие в этом случае зависит не только от расстояния между центром тяжести и опорой (т.е. от
- 27. Простейшие механизмы Простые механизмы — это устройства, в которых работа совершается только за счет механической энергии.
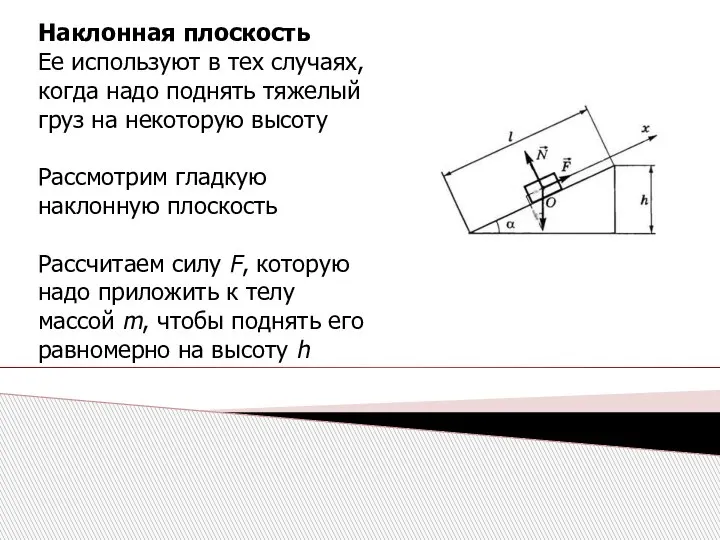
- 28. Наклонная плоскость Ее используют в тех случаях, когда надо поднять тяжелый груз на некоторую высоту Рассмотрим
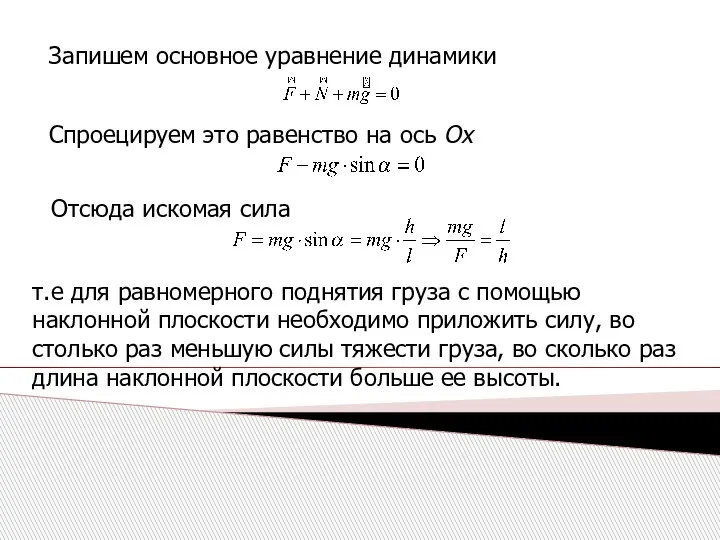
- 29. Запишем основное уравнение динамики Отсюда искомая сила Спроецируем это равенство на ось Ox т.е для равномерного
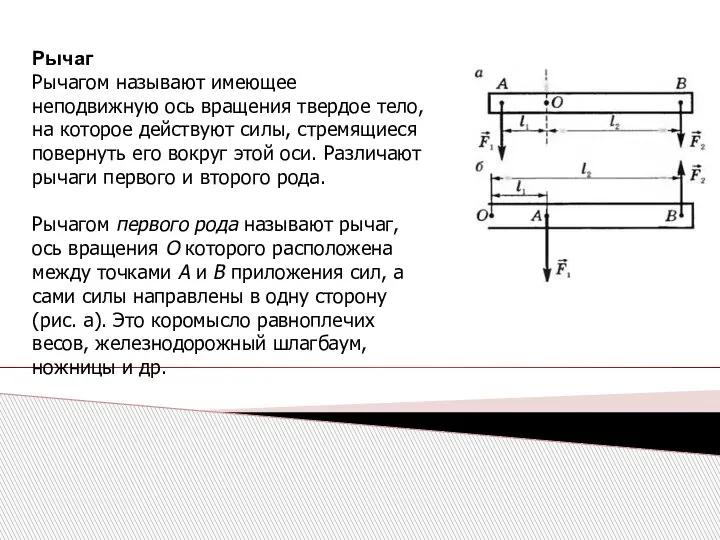
- 30. Рычаг Рычагом называют имеющее неподвижную ось вращения твердое тело, на которое действуют силы, стремящиеся повернуть его
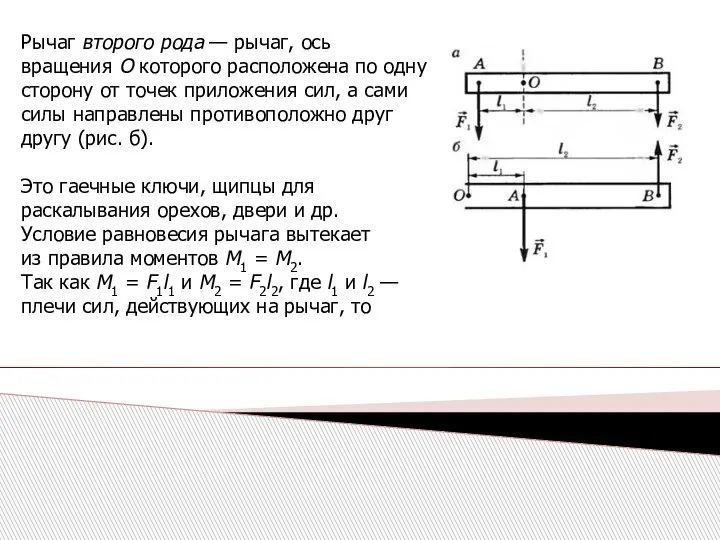
- 31. Рычаг второго рода — рычаг, ось вращения О которого расположена по одну сторону от точек приложения
- 32. условие равновесия рычага При равновесии рычага под действием двух сил модули этих сил обратно пропорциональны их
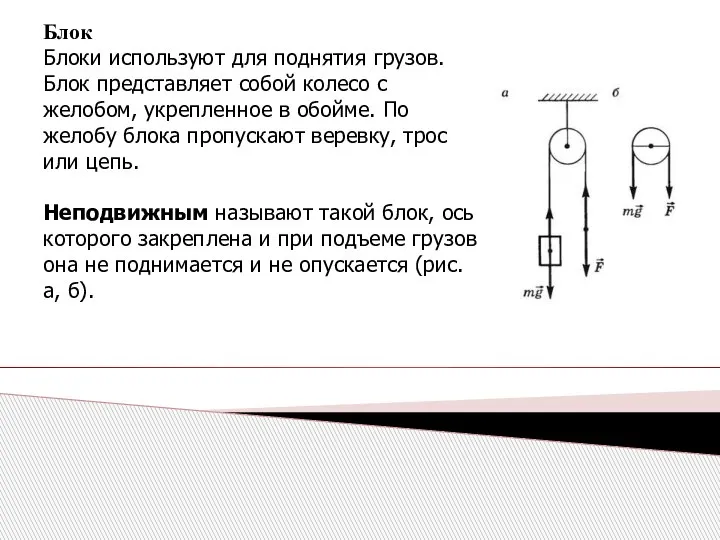
- 33. Блок Блоки используют для поднятия грузов. Блок представляет собой колесо с желобом, укрепленное в обойме. По
- 34. Неподвижный блок можно рассматривать как равноплечий рычаг, у которого плечи приложенных сил равны радиусу колеса Следовательно,
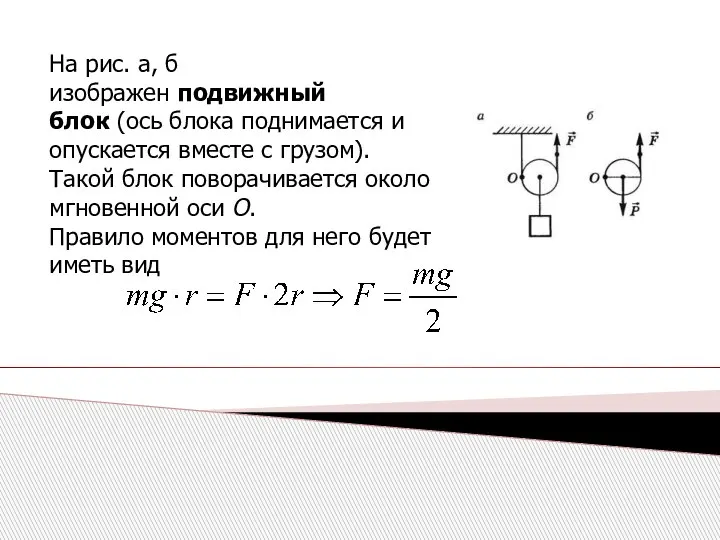
- 35. На рис. а, б изображен подвижный блок (ось блока поднимается и опускается вместе с грузом). Такой
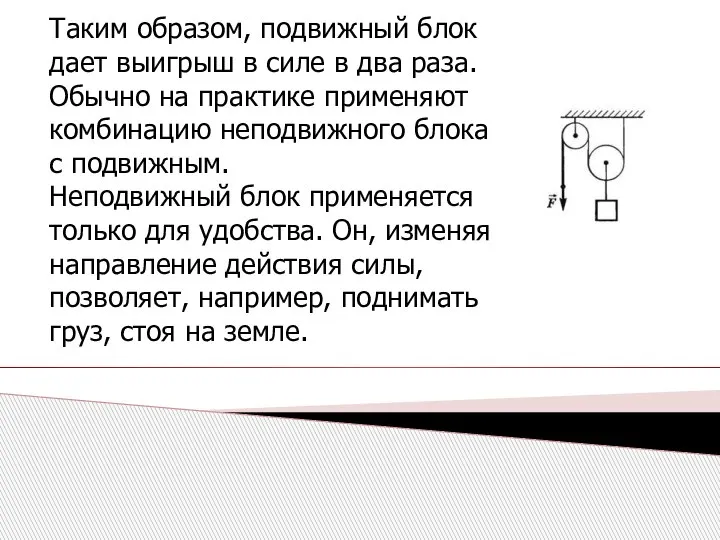
- 36. Таким образом, подвижный блок дает выигрыш в силе в два раза. Обычно на практике применяют комбинацию
- 37. Равенство работ при использовании простых механизмов Мы видим, что с помощью простых механизмов можно получить выигрыш
- 38. Подставим найденные значения силы и получим Таким образом, работа AF равна работе, которую нужно совершить, чтобы
- 39. Действительно, если уравновешенный рычаг привести в движение, то точки приложения сил F1 и F2 за одно
- 40. При использовании неподвижного блока мы видим, что приложенные силы F и mg равны и пути, пройденные
- 41. Таким образом, получая выигрыш в силе в два раза, проигрывают в два раза в перемещении, следовательно,
- 42. При рассмотрении простых механизмов мы не учитываем трение, а также вес самих механизмов. В реальных условиях
- 43. Эффективность работы механизма характеризуют коэффициентом полезного действия (КПД механизма) Коэффициент полезного действия — физическая величина, равная
- 45. Скачать презентацию
Слайд 3Абсолютно твердое тело – это тело, которое ни при каких условиях не
Абсолютно твердое тело – это тело, которое ни при каких условиях не
Слайд 4
Сила как величина векторная характеризуется модулем, направлением в пространстве и точкой приложения
Результат
Сила как величина векторная характеризуется модулем, направлением в пространстве и точкой приложения Результат
Слайд 5Точку приложения силы можно переносить только вдоль прямой, вдоль которой эта сила
Точку приложения силы можно переносить только вдоль прямой, вдоль которой эта сила
Слайд 6Если к телу приложено две силы в одной точке, то равнодействующую находят
Если к телу приложено две силы в одной точке, то равнодействующую находят
Слайд 7Если непараллельные силы приложены в разных точках тела, то для нахождения их
Если непараллельные силы приложены в разных точках тела, то для нахождения их
Слайд 8Условие равновесия тела, не имеющего оси вращения
Условие равновесия такого тела, как и
Условие равновесия тела, не имеющего оси вращения
Условие равновесия такого тела, как и
Слайд 9Выясним условие равновесия тела, которое под действием приложенных к нему сил поступательно
Выясним условие равновесия тела, которое под действием приложенных к нему сил поступательно
Слайд 10Повернем его на небольшой угол φ вокруг оси О. При этом точки приложения сил F⃗1 и F⃗2 совершат перемещение BB'1 и CC'1 .
Повернем его на небольшой угол φ вокруг оси О. При этом точки приложения сил F⃗1 и F⃗2 совершат перемещение BB'1 и CC'1 .
Слайд 11Эти силы совершают работу:
Произведение силы на ее плечо называют моментом силы относительно оси вращения:
Момент
Эти силы совершают работу:
Произведение силы на ее плечо называют моментом силы относительно оси вращения:
Момент
Слайд 12Суммарная работа, совершаемая силами F1 и F2, составляет
На основании теоремы о кинетической энергии ΔWk = А. При
Суммарная работа, совершаемая силами F1 и F2, составляет
На основании теоремы о кинетической энергии ΔWk = А. При
Слайд 13Условия равновесия твердого тела
В общем случае, если тело под действием приложенных к
Условия равновесия твердого тела
В общем случае, если тело под действием приложенных к
Слайд 14Сложение параллельных сил. Центр тяжести
Равнодействующая двух параллельных одинаково направленных сил (рис. 1,
Сложение параллельных сил. Центр тяжести
Равнодействующая двух параллельных одинаково направленных сил (рис. 1,
Слайд 15Сложение параллельных сил. Центр тяжести
Это можно доказать: если в предполагаемой точке О приложения равнодействующей
Сложение параллельных сил. Центр тяжести
Это можно доказать: если в предполагаемой точке О приложения равнодействующей
Слайд 16Равнодействующая двух антипараллельных сил (рис.1 , б) равна по модулю разности их
Равнодействующая двух антипараллельных сил (рис.1 , б) равна по модулю разности их
Слайд 18Центр тяжести О такая точка приложения равнодействующей сил тяжести, действующих на все части тела,
Центр тяжести О такая точка приложения равнодействующей сил тяжести, действующих на все части тела,
Слайд 19Виды равновесия
Различают устойчивое, неустойчивое и безразличное равновесие
Виды равновесия
Различают устойчивое, неустойчивое и безразличное равновесие
Слайд 20Равновесие тела называют устойчивым, если при отклонении от него возникают силы, возвращающие тело
Равновесие тела называют устойчивым, если при отклонении от него возникают силы, возвращающие тело
Слайд 21Равновесие тела называют неустойчивым, если при самом незначительном отклонении от него равнодействующая действующих
Равновесие тела называют неустойчивым, если при самом незначительном отклонении от него равнодействующая действующих
Слайд 22Тело, имеющее ось вращения находится в равновесии, если вертикальная прямая, проходящая через
Тело, имеющее ось вращения находится в равновесии, если вертикальная прямая, проходящая через
Слайд 23Если центр тяжести С выше оси вращения (рис. б; 1), то при любом
Если центр тяжести С выше оси вращения (рис. б; 1), то при любом
Слайд 24Если центр тяжести находится ниже оси вращения (рис. б; 2), то равновесие устойчивое
Если
Если центр тяжести находится ниже оси вращения (рис. б; 2), то равновесие устойчивое
Если
Слайд 25Тело, имеющее площадь опоры, находится в равновесии, если вертикальная прямая, проходящая через
Тело, имеющее площадь опоры, находится в равновесии, если вертикальная прямая, проходящая через
Слайд 26Равновесие в этом случае зависит не только от расстояния между центром тяжести
Равновесие в этом случае зависит не только от расстояния между центром тяжести
Слайд 27Простейшие механизмы
Простые механизмы — это устройства, в которых работа совершается только за
Простейшие механизмы
Простые механизмы — это устройства, в которых работа совершается только за
Слайд 28Наклонная плоскость
Ее используют в тех случаях, когда надо поднять тяжелый груз на
Наклонная плоскость Ее используют в тех случаях, когда надо поднять тяжелый груз на
Слайд 29Запишем основное уравнение динамики
Отсюда искомая сила
Спроецируем это равенство на ось Ox
т.е для равномерного
Запишем основное уравнение динамики
Отсюда искомая сила
Спроецируем это равенство на ось Ox
т.е для равномерного
Слайд 30Рычаг
Рычагом называют имеющее неподвижную ось вращения твердое тело, на которое действуют силы,
Рычаг Рычагом называют имеющее неподвижную ось вращения твердое тело, на которое действуют силы,
Слайд 31Рычаг второго рода — рычаг, ось вращения О которого расположена по одну сторону от точек приложения
Рычаг второго рода — рычаг, ось вращения О которого расположена по одну сторону от точек приложения
Слайд 32условие равновесия рычага
При равновесии рычага под действием двух сил модули этих сил
условие равновесия рычага
При равновесии рычага под действием двух сил модули этих сил
Слайд 33Блок
Блоки используют для поднятия грузов. Блок представляет собой колесо с желобом, укрепленное
Блок Блоки используют для поднятия грузов. Блок представляет собой колесо с желобом, укрепленное
Слайд 34Неподвижный блок можно рассматривать как равноплечий рычаг, у которого плечи приложенных сил
Неподвижный блок можно рассматривать как равноплечий рычаг, у которого плечи приложенных сил
Слайд 35На рис. а, б изображен подвижный блок (ось блока поднимается и опускается вместе с
На рис. а, б изображен подвижный блок (ось блока поднимается и опускается вместе с
Слайд 36Таким образом, подвижный блок дает выигрыш в силе в два раза.
Обычно на
Таким образом, подвижный блок дает выигрыш в силе в два раза. Обычно на
Слайд 37Равенство работ при использовании простых механизмов
Мы видим, что с помощью простых механизмов
Равенство работ при использовании простых механизмов
Мы видим, что с помощью простых механизмов
Слайд 38Подставим найденные значения силы
и получим
Таким образом, работа AF равна работе, которую нужно совершить, чтобы равномерно
Подставим найденные значения силы
и получим
Таким образом, работа AF равна работе, которую нужно совершить, чтобы равномерно
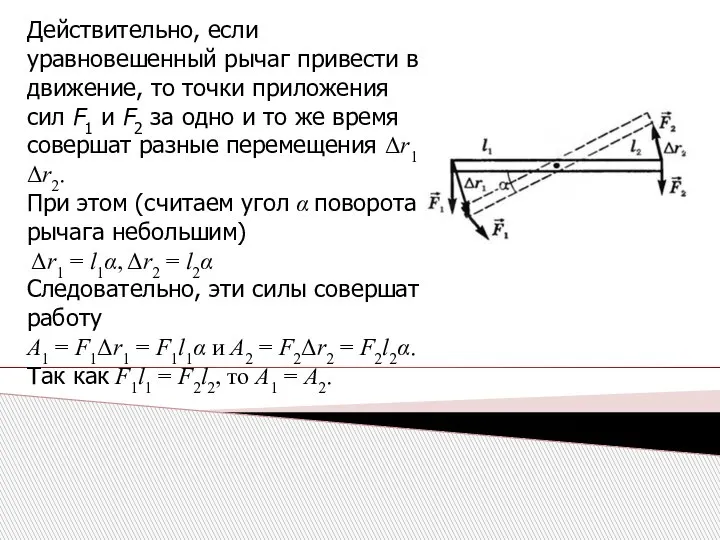
Слайд 39Действительно, если уравновешенный рычаг привести в движение, то точки приложения сил F1 и F2 за одно
Действительно, если уравновешенный рычаг привести в движение, то точки приложения сил F1 и F2 за одно
Слайд 40При использовании неподвижного блока мы видим, что приложенные силы F и mg равны и пути, пройденные
При использовании неподвижного блока мы видим, что приложенные силы F и mg равны и пути, пройденные
Слайд 41Таким образом, получая выигрыш в силе в два раза, проигрывают в два
Таким образом, получая выигрыш в силе в два раза, проигрывают в два
Слайд 42При рассмотрении простых механизмов мы не учитываем трение, а также вес самих
При рассмотрении простых механизмов мы не учитываем трение, а также вес самих
Слайд 43Эффективность работы механизма характеризуют коэффициентом полезного действия (КПД механизма)
Коэффициент полезного действия —
Эффективность работы механизма характеризуют коэффициентом полезного действия (КПД механизма) Коэффициент полезного действия —
 Контроль колісних візків
Контроль колісних візків Презентация на тему Электроемкость
Презентация на тему Электроемкость  Расчет давления на дно сосуда
Расчет давления на дно сосуда Механические колебания и волны
Механические колебания и волны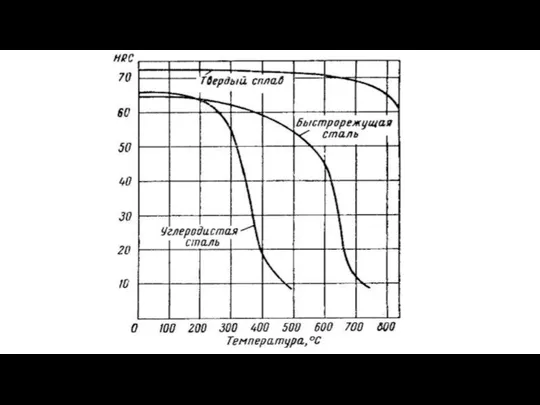 Номинальные допустимые напряжения для труб из углеродистых сталей при разных температурах, МПа
Номинальные допустимые напряжения для труб из углеродистых сталей при разных температурах, МПа Три состояния вещества. Различие в молекулярном строении твердых тел, жидкостей и газов
Три состояния вещества. Различие в молекулярном строении твердых тел, жидкостей и газов Лазер - история
Лазер - история Установки и оборудование для аэроакустического эксперимента в ЦАГИ
Установки и оборудование для аэроакустического эксперимента в ЦАГИ Линейные полупроводниковые приборы. Полупроводниковые резисторы
Линейные полупроводниковые приборы. Полупроводниковые резисторы Количество теплоты, обобщающий урок-практикум, 8, 10 класс
Количество теплоты, обобщающий урок-практикум, 8, 10 класс Газовые законы
Газовые законы impuls_prezentatsia
impuls_prezentatsia Трехфазный переменный ток. Мощность трехфазной цепи
Трехфазный переменный ток. Мощность трехфазной цепи Презентация на тему Радиоактивные отходы
Презентация на тему Радиоактивные отходы  Ионизирующее излучение
Ионизирующее излучение Общие сведения о системе пуска
Общие сведения о системе пуска Преобразователь частоты НПУ
Преобразователь частоты НПУ Импульс тела. Закон сохранения импульса
Импульс тела. Закон сохранения импульса Техническая эксплуатация автомобиля Камаз 4310 ремонт сцепления автомобиля Камаз 4310
Техническая эксплуатация автомобиля Камаз 4310 ремонт сцепления автомобиля Камаз 4310 Электромагнитное поле. История открытия. Компьютер как источник переменного электромагнитного поля
Электромагнитное поле. История открытия. Компьютер как источник переменного электромагнитного поля Презентация на тему Зрение
Презентация на тему Зрение  Электромагнитные волны
Электромагнитные волны Лекция 6 нелинейные электрические цепи постоянного тока
Лекция 6 нелинейные электрические цепи постоянного тока Газоразрядные приборы
Газоразрядные приборы Динамика судна. Общие понятия гидромеханики
Динамика судна. Общие понятия гидромеханики Урок-конференция
Урок-конференция Адсорбционные материалы. Металлоорганические каркасы
Адсорбционные материалы. Металлоорганические каркасы Отказы
Отказы