Слайд 22
1 Сущность динамического программирования
Динамическое программирование (ДП) определяет оптимальное решение n-мерной задачи
путем ее декомпозиции на n этапов, каждый из которых представляет подзадачу относительно одной переменной. Вычислительное преимущество такого подхода состоит в том, что мы занимаемся решением одномерных оптимизационных подзадач вместо большой n-мерной задачи. Фундаментальным принципом ДП, составляющим основу декомпозиции задачи, является оптимальность. Так как природа каждого этапа решения зависит от конкретной оптимизационной задачи, ДП не предлагает вычислительных алгоритмов непосредственно для каждого этапа. Вычислительные аспекты решения оптимизационных подзадач на каждом этапе проектируются и реализуются по отдельности (что, конечно, не исключает применения единого алгоритма для всех этапов).
2 Рекуррентная природа вычислений ДП
Вычисления в ДП выполняются рекуррентно в том смысле, что оптимальное решение одной подзадачи используется в качестве исходных данных для следующей. Решив последнюю подзадачу, мы получим оптимальное решение исходной задачи. Способ выполнения рекуррентных вычислений зависит от того, как производится декомпозиция исходной задачи. В частности, подзадачи обычно связаны между собой некоторыми общими ограничениями. Если осуществляется переход от одной подзадачи к другой, то должны учитываться эти ограничения.
Слайд 33
Пример 1. Задача о кратчайшем пути. Предположим, необходимо выбрать кратчайший путь между
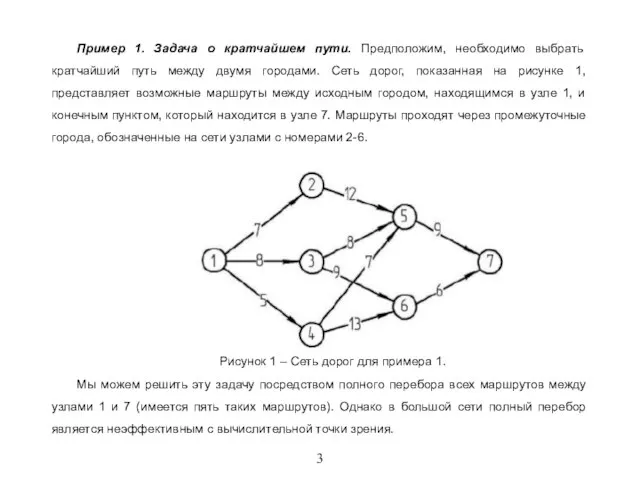
двумя городами. Сеть дорог, показанная на рисунке 1, представляет возможные маршруты между исходным городом, находящимся в узле 1, и конечным пунктом, который находится в узле 7. Маршруты проходят через промежуточные города, обозначенные на сети узлами с номерами 2-6.
Рисунок 1 – Сеть дорог для примера 1.
Мы можем решить эту задачу посредством полного перебора всех маршрутов между узлами 1 и 7 (имеется пять таких маршрутов). Однако в большой сети полный перебор является неэффективным с вычислительной точки зрения.
Слайд 44
Чтобы решить эту задачу с помощью методов динамического программирования, сначала разделим ее
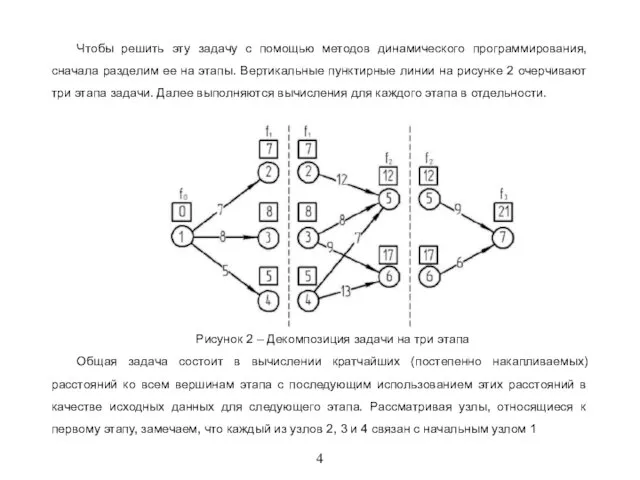
на этапы. Вертикальные пунктирные линии на рисунке 2 очерчивают три этапа задачи. Далее выполняются вычисления для каждого этапа в отдельности.
Рисунок 2 – Декомпозиция задачи на три этапа
Общая задача состоит в вычислении кратчайших (постепенно накапливаемых) расстояний ко всем вершинам этапа с последующим использованием этих расстояний в качестве исходных данных для следующего этапа. Рассматривая узлы, относящиеся к первому этапу, замечаем, что каждый из узлов 2, 3 и 4 связан с начальным узлом 1
Слайд 55
единственной дугой (рис. 2). Следовательно, для первого этапа имеем следующее.
Этап 1. Итоговые
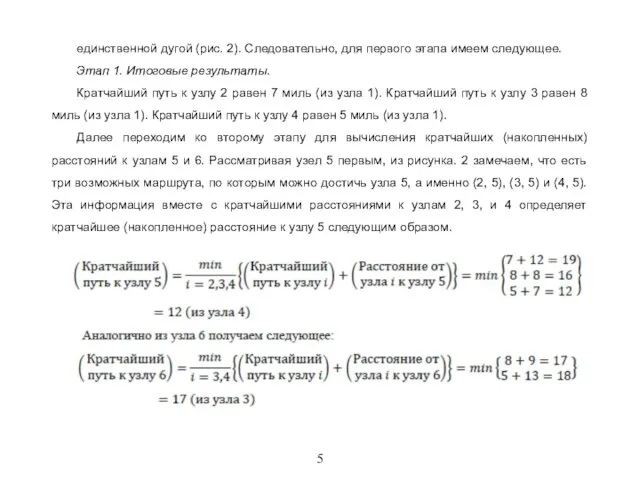
результаты.
Кратчайший путь к узлу 2 равен 7 миль (из узла 1). Кратчайший путь к узлу 3 равен 8 миль (из узла 1). Кратчайший путь к узлу 4 равен 5 миль (из узла 1).
Далее переходим ко второму этапу для вычисления кратчайших (накопленных) расстояний к узлам 5 и 6. Рассматривая узел 5 первым, из рисунка. 2 замечаем, что есть три возможных маршрута, по которым можно достичь узла 5, а именно (2, 5), (3, 5) и (4, 5). Эта информация вместе с кратчайшими расстояниями к узлам 2, 3, и 4 определяет кратчайшее (накопленное) расстояние к узлу 5 следующим образом.
Слайд 66
Этап 2. Итоговые результаты.
Кратчайший путь к узлу 5 равен 12 миль (из
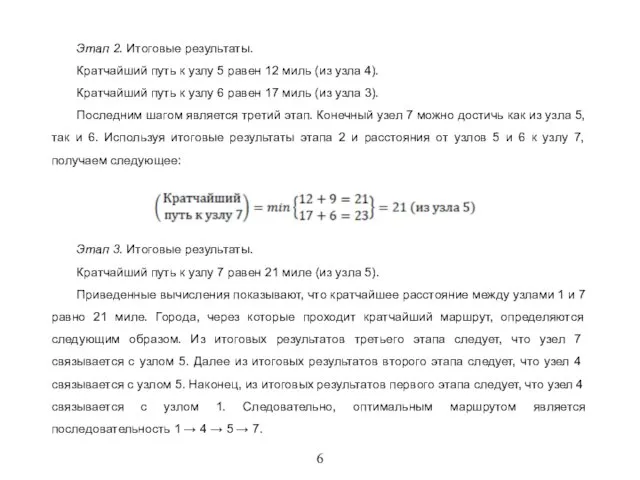
узла 4).
Кратчайший путь к узлу 6 равен 17 миль (из узла 3).
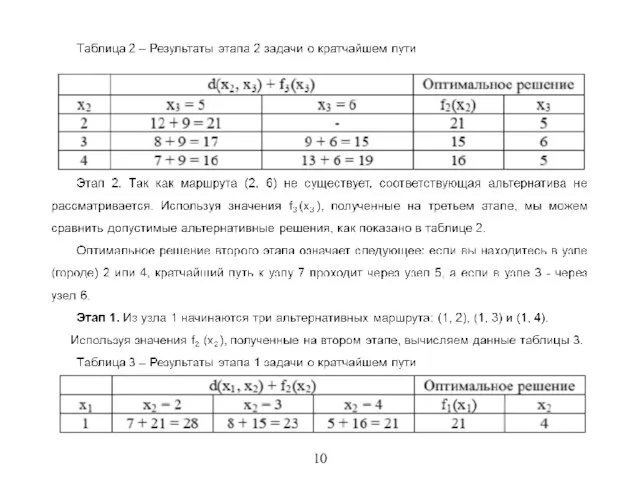
Последним шагом является третий этап. Конечный узел 7 можно достичь как из узла 5, так и 6. Используя итоговые результаты этапа 2 и расстояния от узлов 5 и 6 к узлу 7, получаем следующее:
Этап 3. Итоговые результаты.
Кратчайший путь к узлу 7 равен 21 миле (из узла 5).
Приведенные вычисления показывают, что кратчайшее расстояние между узлами 1 и 7 равно 21 миле. Города, через которые проходит кратчайший маршрут, определяются следующим образом. Из итоговых результатов третьего этапа следует, что узел 7 связывается с узлом 5. Далее из итоговых результатов второго этапа следует, что узел 4 связывается с узлом 5. Наконец, из итоговых результатов первого этапа следует, что узел 4 связывается с узлом 1. Следовательно, оптимальным маршрутом является последовательность 1 → 4 → 5 → 7.
Слайд 88
Принцип оптимальности. На каждом этапе оптимальная стратегия определяется независимо от стратегий, использованных
на предыдущих этапах.
Применение принципа оптимальности демонстрируется вычислениями из примера 1. Например, на этапе 3 мы используем кратчайшие пути к узлам 5 и 6 и не интересуемся, как эти узлы были достигнуты из узла 1.
Рекуррентные алгоритмы прямой и обратной прогонки
В примере 1 вычисления проводились последовательно: от первого этапа до третьего. Такая последовательность вычислений известна как алгоритм прямой прогонки. Этот же пример может быть решен с помощью алгоритма обратной прогонки, в соответствии с которым вычисления проводятся от третьего этапа до первого.
Алгоритмы прямой и обратной прогонки приводят к одному и тому же решению. Несмотря на то, что алгоритм прямой прогонки представляется более логичным, в специальной литературе, посвященной динамическому программированию, неизменно используется алгоритм обратной прогонки. Причина этого в том, что в общем случае алгоритм обратной прогонки может быть более эффективным с вычислительной точки зрения. Продемонстрируем использование алгоритма обратной прогонки на примере 1. Мы также представим вычисления динамического программирования в компактной табличной форме.

 Программирование на языке C++
Программирование на языке C++ Описательные статистики
Описательные статистики Глухова_Полная лекция
Глухова_Полная лекция Автоматизация рекламных кампаний
Автоматизация рекламных кампаний Вёрстка. Типы вёрстки
Вёрстка. Типы вёрстки Группа церкви Евангельская жизнь
Группа церкви Евангельская жизнь Технология работы с инфоповодами
Технология работы с инфоповодами Организация ввода и вывода данных начала программирования
Организация ввода и вывода данных начала программирования Этапы разработки программы. Структурное программирование для АСУб и ЭВМб (тема 1-2)
Этапы разработки программы. Структурное программирование для АСУб и ЭВМб (тема 1-2) Использование ИКТ для повышения интереса детей к проектной деятельности и здоровому образу жизни
Использование ИКТ для повышения интереса детей к проектной деятельности и здоровому образу жизни Выбор ПО для выполнения сечений и разрезов 2D объекта. (2 занятие)
Выбор ПО для выполнения сечений и разрезов 2D объекта. (2 занятие) Моя профессия – оператор ЭВМ
Моя профессия – оператор ЭВМ Условный оператор. { Решение задач
Условный оператор. { Решение задач Алгоритмы, их типы. Алгоритмическая структура ветвление, выбор
Алгоритмы, их типы. Алгоритмическая структура ветвление, выбор Функции и методы списков
Функции и методы списков Создание музыкальной композиции с помощью компьютерных технологий
Создание музыкальной композиции с помощью компьютерных технологий Технологии локальных сетей ArcNet, TokenRing, Ethernet. Лекция 2
Технологии локальных сетей ArcNet, TokenRing, Ethernet. Лекция 2 Классификация технических каналов утечки информации
Классификация технических каналов утечки информации Сфера деятельности: графический дизайн, веб-дизайн
Сфера деятельности: графический дизайн, веб-дизайн Источники информации. Тест (2 класс)
Источники информации. Тест (2 класс) Алгоритмы и исполнители
Алгоритмы и исполнители Игра лабиринт
Игра лабиринт Системное программное обеспечение защищённых инфокоммуникационных систем
Системное программное обеспечение защищённых инфокоммуникационных систем Системы счисления
Системы счисления Установка и настройка серверов DNS, WINS, DHCP
Установка и настройка серверов DNS, WINS, DHCP Создание технического обоснования и алгоритмов работы глобальных и территориальных сетей
Создание технического обоснования и алгоритмов работы глобальных и территориальных сетей Структуры хранения данных
Структуры хранения данных Changes and new features
Changes and new features