Слайд 5Для того, чтобы выполнялось правило «П», шаг ∆t должен быть равен интервалу
дискретности времени. Чтобы промоделировать процесс «Р», необходимо просматривать элементы в направлении, противоположном направлению передачи требований, начиная с последней фазы. При наличии цикла, чтобы обеспечить выполнение процесса «Р» во всех случаях, необходимо организовать двойной просмотр элементов, входящих в цикл.
Основным недостатком алгоритма с детерминированным шагом является большое число лишних вычислений, не связанных с изменениями состояний элементов СМО. Однако, этот недостаток часто является несущественным, т.к. в схемах с большим числом элементов затраты на вычисления, связанные с моделированием работы СМО в периоды её неизменного состояния, относительно малы.
Слайд 6В моделирующих алгоритмах со случайным шагом, в отличие от моделирующего алгоритма с
детерминированным шагом, элементы СМО просматриваются только в моменты изменения состояния системы. Поэтому длительность шага ∆t представляет собой случайную величину. Моделирующие алгоритмы со случайным шагом бывают синхронными и асинхронными.
При построении синхронного моделирующего алгоритма выбирается один из элементов СМО или один из входящих потоков в качестве ведущего. Шаги моделирования при этом соответствуют моментам изменения состояния ведущего элемента СМО или моментам поступления требований ведущего входящего потока. Процесс моделирования при этом как бы синхронизируется этими моментами.
Слайд 7При использовании синхронного моделирования СМО с циклом возникают серьезные трудности. Преодоление этих
трудностей, в принципе, возможно, однако это вызывает усложнение алгоритма.
В асинхронных моделирующих алгоритмах ведущий (синхронизирующий) элемент отсутствует, и очередному шагу моделирования может соответствовать поступление требования любого входящего потока или какое-либо событие в любом из аппаратов. Асинхронные моделирующие алгоритмы подразделяются на алгоритмы с прогнозированием и без прогнозирования. В моделирующем алгоритме с прогнозированием очередному шагу моделирования может соответствовать только освобождение любого агрегата, то есть переход заявки из него в элемент следующей фазы или появление заявки любого входящего потока.
Слайд 8В моделирующих алгоритмах без прогнозирования очередному шагу моделирования соответствует момент окончания обслуживания
в любом агрегате или поступление заявки любого входящего потока. В этом случае нет необходимости в прогнозировании момента освобождения агрегата, так как вопрос о том, останется ли требование в агрегате после окончания обслуживания, может быть решен на соответствующем шаге.
В алгоритмах без прогнозирования, которые бывают циклическими и нециклическими, моделирование процесса распространение изменений состояния элементов в направлении, противоположном направлению движения заявок в СМО, осуществляется благодаря использованию определенных способов включения моделирующих блоков. В циклическом моделирующем алгоритме этот способ состоит в том, что на каждом шаге просматриваются все элементы СМО и определяется, какие переходы требований из одного элемента в другой могут произойти в данный момент.

 Главные ресурсы молодежной политики
Главные ресурсы молодежной политики Tekhnologii_ERP
Tekhnologii_ERP Исторический комментарий, как часть научно-справочного аппарата издания или исследования и самостоятельный жанр
Исторический комментарий, как часть научно-справочного аппарата издания или исследования и самостоятельный жанр Бизнес- контролинг
Бизнес- контролинг Объединение компьютеров в локальную сеть
Объединение компьютеров в локальную сеть Знакомство с компьютером
Знакомство с компьютером Історія та сучасність коректури
Історія та сучасність коректури E-mail – электронная почта
E-mail – электронная почта Путешествие в страну Информатику
Путешествие в страну Информатику Разработка дизайн-макета
Разработка дизайн-макета Алгоритм и его свойства
Алгоритм и его свойства Электронные издания в сети Интернет. Виды по целевому назначению
Электронные издания в сети Интернет. Виды по целевому назначению Презентация на тему Информатика как наука
Презентация на тему Информатика как наука  Мобильное приложение РНКБ Банка
Мобильное приложение РНКБ Банка Компьютерная зависимость
Компьютерная зависимость Burint OS 8.1
Burint OS 8.1 Интернет-сервисы по созданию видеороликов
Интернет-сервисы по созданию видеороликов Аппаратная конфигурация ПК
Аппаратная конфигурация ПК Компьютерная игра Death Patrol
Компьютерная игра Death Patrol Регистрация в учебной среде ИнфоДа Moodle
Регистрация в учебной среде ИнфоДа Moodle نگاه کلی به سیستم عامل
نگاه کلی به سیستم عامل Кодирование в системах связи. Тема 3
Кодирование в системах связи. Тема 3 Правила составления библиографического списка
Правила составления библиографического списка Технология решения задания С1
Технология решения задания С1 Сдача теста в Системе дистанционного тестирования (СДТ)
Сдача теста в Системе дистанционного тестирования (СДТ) Средства мультимедиа
Средства мультимедиа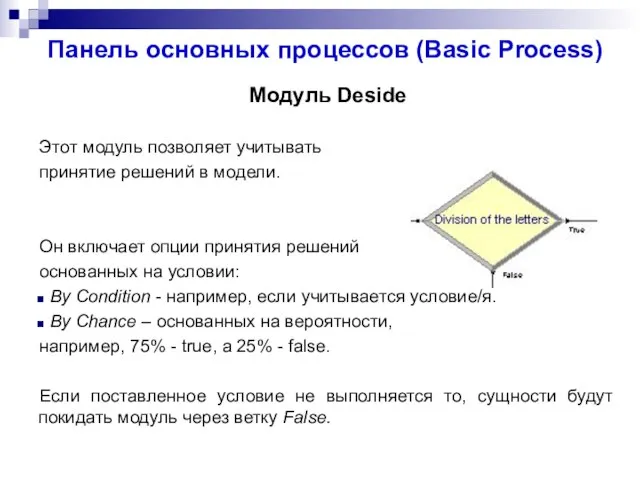 Панель основных процессов (Basic Process)
Панель основных процессов (Basic Process) Решение задач с помощью графов
Решение задач с помощью графов