- Наведение беспилотных ЛА. Базовые определения

Содержание
- 2. Классификация систем управления беспилотными ЛА. Требуемое движение. Задачи навигации, наведения и подходы к их решению. Функциональные
- 3. Наведение беспилотных ЛА. Базовые определения
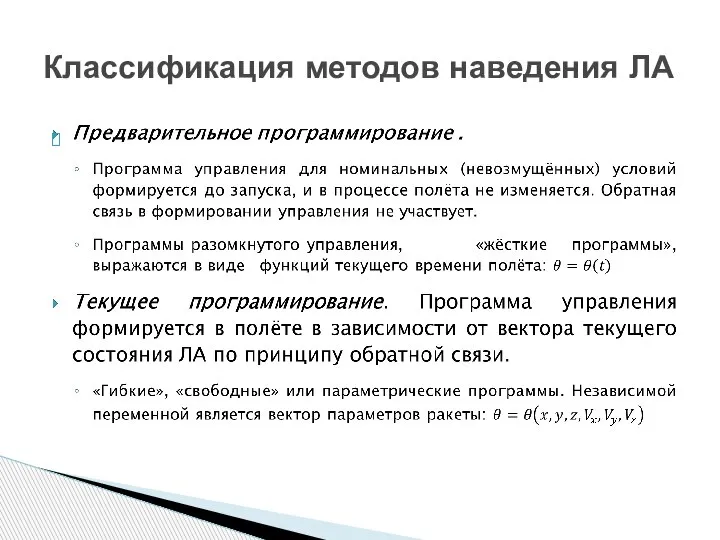
- 4. Классификация методов наведения ЛА
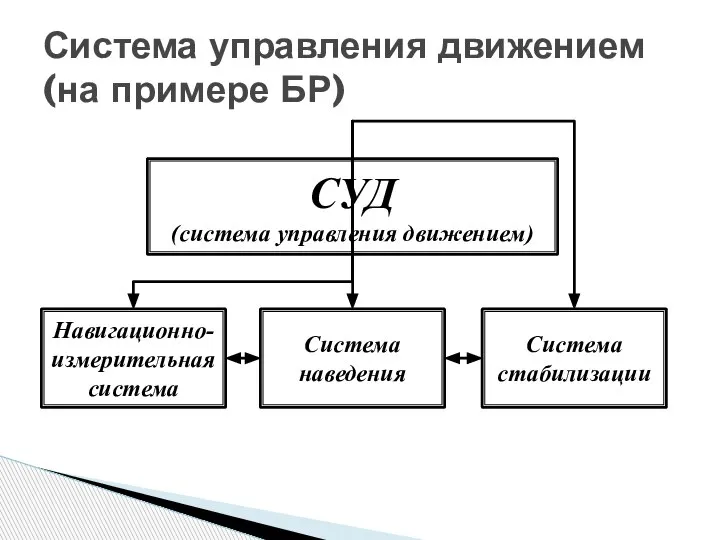
- 5. Система управления движением (на примере БР)
- 6. Навигационно-измерительная система предназначена для получения информации о движении объекта управления, достаточной для успешного функционирования СУД (инерциальные
- 7. Существует однозначная связь между точкой попадания и вектором состояния в начале ПУТ (НУ ПУТ) Если мы
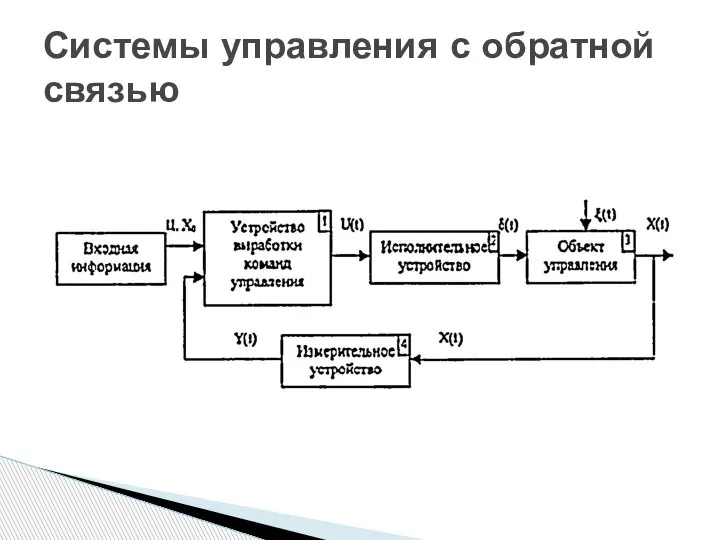
- 8. Системы управления с обратной связью
- 9. Разделение движения на продольное и боковое Разделение управления по принципу «Наведение - стабилизация» Наведение подразумевает выработку
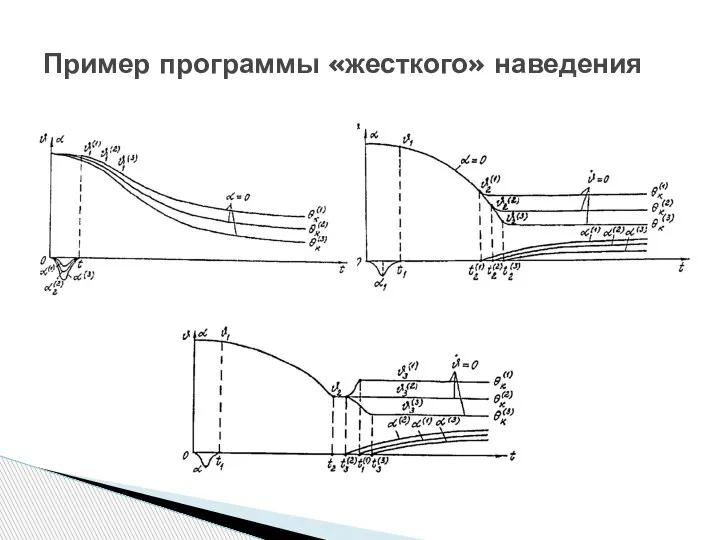
- 10. Пример программы «жесткого» наведения
- 11. Задачи навигации, наведения и подходы к их решению.
- 12. Функциональные и терминальные методы наведения.
- 14. Скачать презентацию
Слайд 2Классификация систем управления беспилотными ЛА.
Требуемое движение.
Задачи навигации, наведения и подходы к их
Классификация систем управления беспилотными ЛА.
Требуемое движение.
Задачи навигации, наведения и подходы к их
Слайд 3
Наведение беспилотных ЛА. Базовые определения
Наведение беспилотных ЛА. Базовые определения
Слайд 4
Классификация методов наведения ЛА
Классификация методов наведения ЛА
Слайд 5Система управления движением (на примере БР)
Система управления движением (на примере БР)
Слайд 6Навигационно-измерительная система предназначена для получения информации о движении объекта управления, достаточной для
Навигационно-измерительная система предназначена для получения информации о движении объекта управления, достаточной для
Слайд 7Существует однозначная связь между точкой попадания и вектором состояния в начале ПУТ
Существует однозначная связь между точкой попадания и вектором состояния в начале ПУТ
Слайд 8Системы управления с обратной связью
Системы управления с обратной связью
Слайд 9Разделение движения на продольное и боковое
Разделение управления по принципу «Наведение - стабилизация»
Наведение
Разделение движения на продольное и боковое
Разделение управления по принципу «Наведение - стабилизация»
Наведение
Слайд 10Пример программы «жесткого» наведения
Пример программы «жесткого» наведения
Слайд 11Задачи навигации, наведения и подходы к их решению.
Задачи навигации, наведения и подходы к их решению.
Слайд 12Функциональные и терминальные методы наведения.
Функциональные и терминальные методы наведения.
 Шифрование с использованием закрытого ключа
Шифрование с использованием закрытого ключа Создание компьютера
Создание компьютера БАРС Web - Электронная школа
БАРС Web - Электронная школа Асимметричные алгоритмы. Лекция №7
Асимметричные алгоритмы. Лекция №7 История журналистики
История журналистики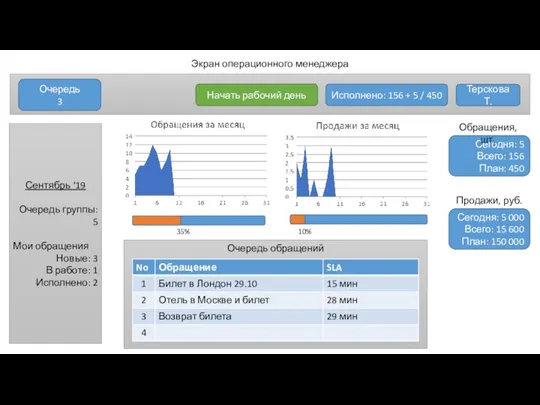 Экран операционного менеджера
Экран операционного менеджера Презентация PowerPoint - современный способ представления самой разной информации
Презентация PowerPoint - современный способ представления самой разной информации Введение в Linux. Знакомство и установка
Введение в Linux. Знакомство и установка Remote method invocation in Java
Remote method invocation in Java Файловый Менеджер
Файловый Менеджер Основы графического дизайна
Основы графического дизайна Искусственный интеллект
Искусственный интеллект Функции Excel. ОКРУГЛ
Функции Excel. ОКРУГЛ Международная online олимпиада медицинских вузов Самарканд – 2020
Международная online олимпиада медицинских вузов Самарканд – 2020 Розроблення системи формування навчальних занять з використанням технології сортування даних
Розроблення системи формування навчальних занять з використанням технології сортування даних Механизм оффлайновых взаиморасчетов с партнерами
Механизм оффлайновых взаиморасчетов с партнерами Антивирусная безопасность. Программное обеспечение
Антивирусная безопасность. Программное обеспечение Корректировки по сайту
Корректировки по сайту م1 تعريفات ومفاهيم
م1 تعريفات ومفاهيم Фрейм технологии
Фрейм технологии Уроки безопасности в Интернете
Уроки безопасности в Интернете Таргетированная реклама
Таргетированная реклама Сауат макет
Сауат макет Готовимся к экзамену №1. Разбираем типовые ошибки
Готовимся к экзамену №1. Разбираем типовые ошибки История средств хранения информации
История средств хранения информации Інформаційна технологія
Інформаційна технологія Контроль медиаполя Москвы. Предложения по развитию
Контроль медиаполя Москвы. Предложения по развитию Экстремальное программирование (XP)
Экстремальное программирование (XP)