- Планирование процессов L/O/G/O

Содержание
- 2. Основные понятия планирования Планирование - обеспечение поочередного доступа процессов к одному процессору. Планировщик - отвечающая за
- 3. Основные понятия планирования Ситуации, когда необходимо планирование: Когда создается процесс Когда процесс завершает работу Когда процесс
- 4. Основные понятия планирования Виды систем: Системы пакетной обработки - могут использовать неприоритетный и приоритетный алгоритм Интерактивные
- 5. Задачи алгоритмов планирования Для всех систем Справедливость - каждому процессу справедливую долю процессорного времени Контроль над
- 6. Задачи алгоритмов планирования Системы пакетной обработки Пропускная способность - количество задач в час Оборотное время -
- 7. Задачи алгоритмов планирования Интерактивные системы Время отклика - быстрая реакция на запросы Соразмерность - выполнение ожиданий
- 8. Основные понятия планирования Алгоритм планирования без переключений (неприоритетный) - не требует прерывание по аппаратному таймеру, процесс
- 9. Основные понятия планирования Алгоритм планирования с переключениями (приоритетный) - требует прерывание по аппаратному таймеру, процесс работает
- 10. Механизмы планирования Таймер – позволяет отсчитывать время выполнения процесса в процессоре и регулировать загрузку процессора Переключение
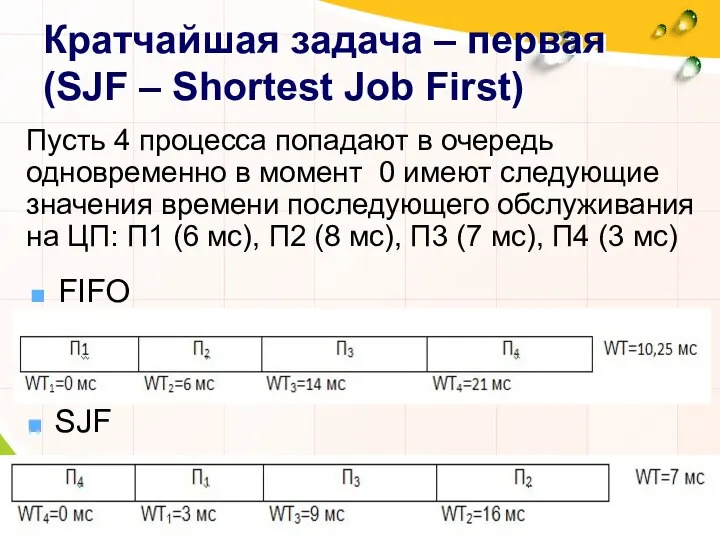
- 11. Планирование в системах пакетной обработки "Первый пришел - первым обслужен" (FIFO - First In Fist Out)
- 12. FIFO Пусть три процесса попадают в очередь одновременно в момент 0 и имеют следующие значения времени
- 13. FIFO Преимущества: Простота Справедливость Недостатки: Процесс, ограниченный возможностями процессора может затормозить более быстрые процессы, ограниченные устройствами
- 14. Кратчайшая задача – первая (SJF – Shortest Job First) Пусть 4 процесса попадают в очередь одновременно
- 15. Кратчайшая задача – первая (SJF – Shortest Job First) Преимущества: Уменьшение оборотного времени Справедливость Недостатки: Длинный
- 16. Наименьшее оставшееся время выполнения (SRT – Shortest Remaining Time) Аналог SJF, но с переключениями. Если приходит
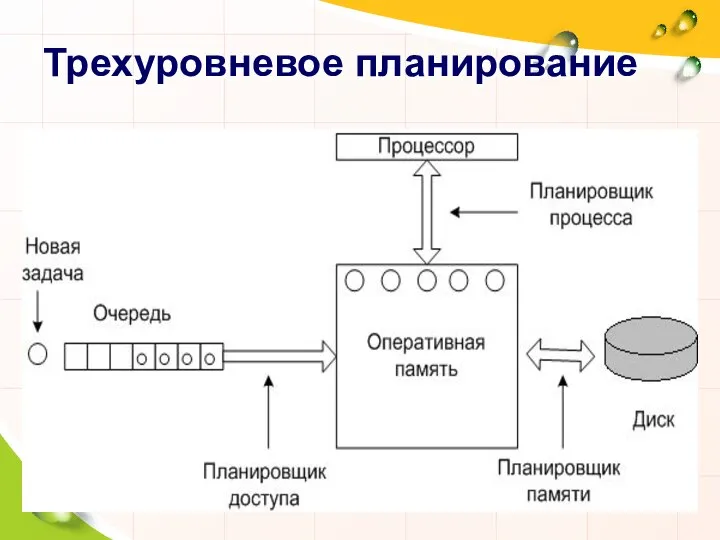
- 17. Трехуровневое планирование
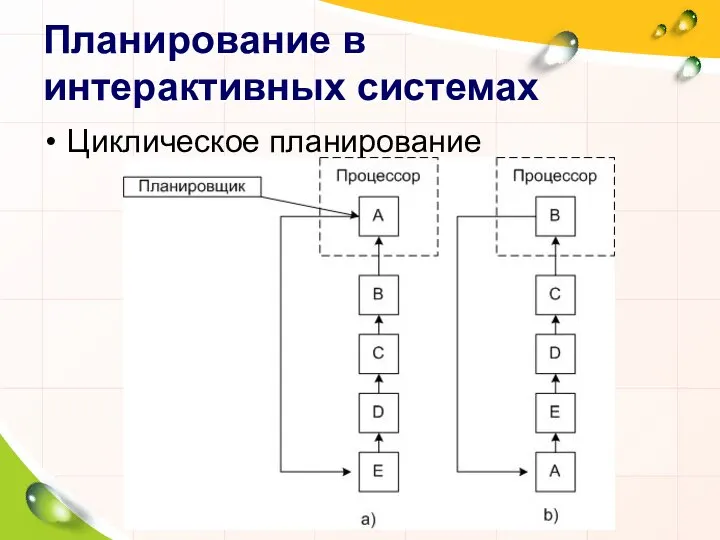
- 18. Планирование в интерактивных системах Циклическое планирование
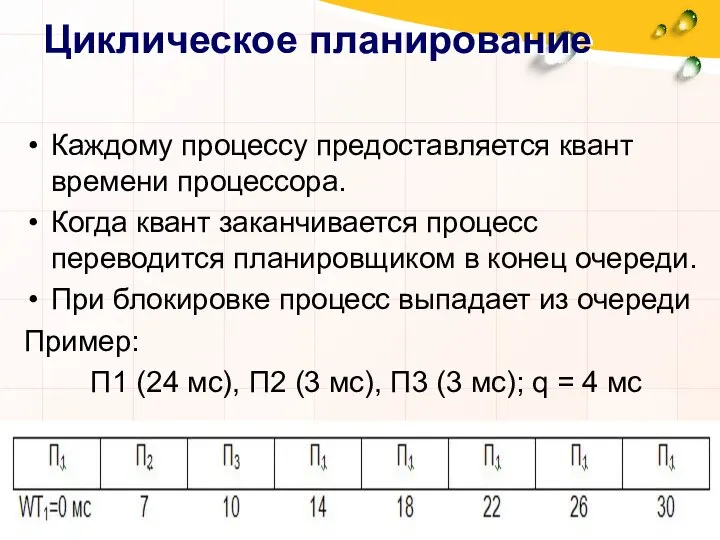
- 19. Циклическое планирование Каждому процессу предоставляется квант времени процессора. Когда квант заканчивается процесс переводится планировщиком в конец
- 20. Циклическое планирование Преимущества: Простота Справедливость Недостатки: При малом кванте - частые переключения, в результате уменьшение производительности
- 21. Приоритетное планирование Каждому процессу присваивается приоритет, и управление передается процессу с самым высоким приоритетом Приоритет может
- 22. Приоритетное планирование Часто процессы объединяют по приоритетам в группы, и используют среди групп - приоритетное планирование
- 23. Группы с разным квантом времени Процесс либо заканчивает работу, либо переходит в другую группу
- 24. Группы с разным назначением процессов Процесс, отвечающий на запрос, переходит в группу с наивысшим приоритетом
- 25. Планирование в интерактивных системах Гарантированное планирование В системе с n-процессами, каждому процессу будет предоставлено 1/n времени
- 26. Планирование в интерактивных системах Лотерейное планирование Процессам раздаются "лотерейные билеты" на доступ к ресурсам. Планировщик может
- 27. Планирование в системах реального времени Системы реального времени делятся на: жесткие (жесткие сроки для каждой задачи)
- 28. Планирование в системах реального времени Внешние события, на которые система должна реагировать, делятся: периодические - потоковое
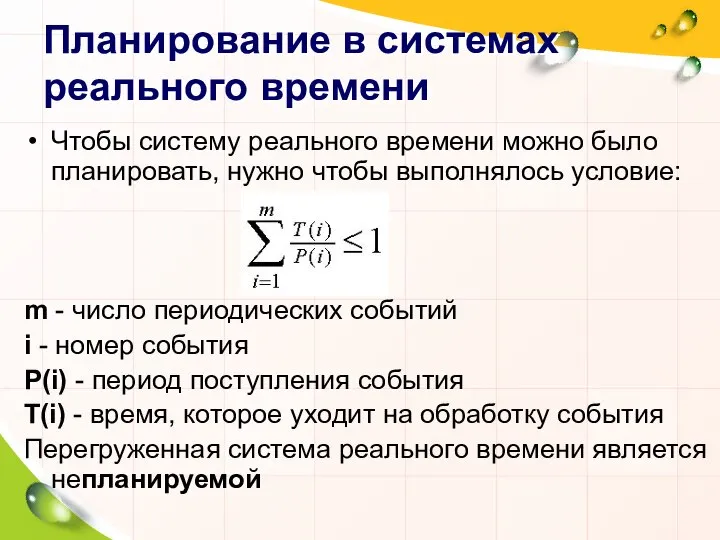
- 29. Планирование в системах реального времени Чтобы систему реального времени можно было планировать, нужно чтобы выполнялось условие:
- 30. Общее планирование реального времени Каждый процесс борется за процессор со своим заданием и графиком его выполнения.
- 31. Общее планирование реального времени Планировщик должен знать: Частоту , с которой должен работать процесс объем работ,
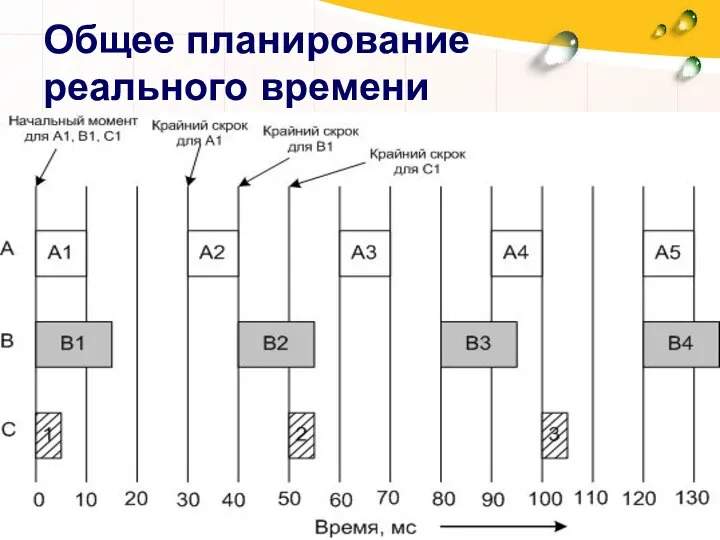
- 32. Общее планирование реального времени Пример: имеются 3 периодических процесса. Процесс А запускается каждые 30мс, обработка -
- 33. Общее планирование реального времени
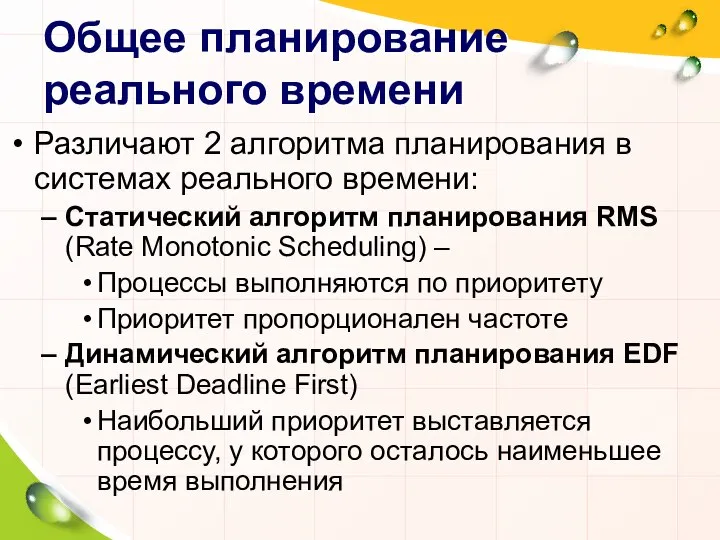
- 34. Общее планирование реального времени Различают 2 алгоритма планирования в системах реального времени: Статический алгоритм планирования RMS
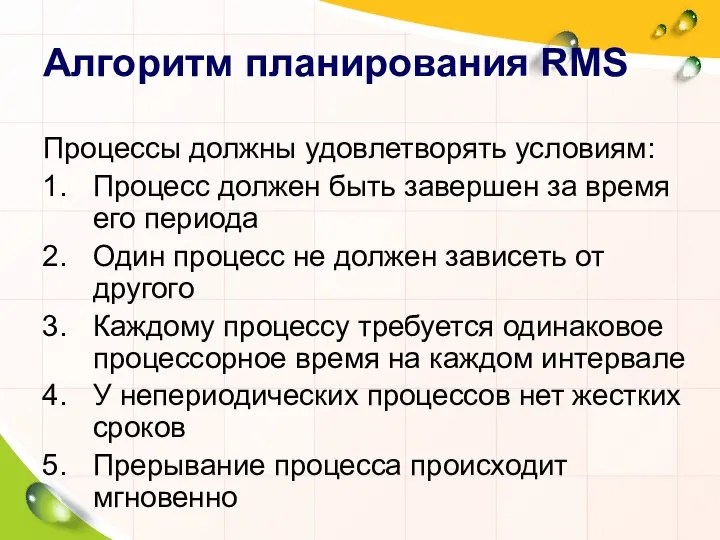
- 35. Алгоритм планирования RMS Процессы должны удовлетворять условиям: Процесс должен быть завершен за время его периода Один
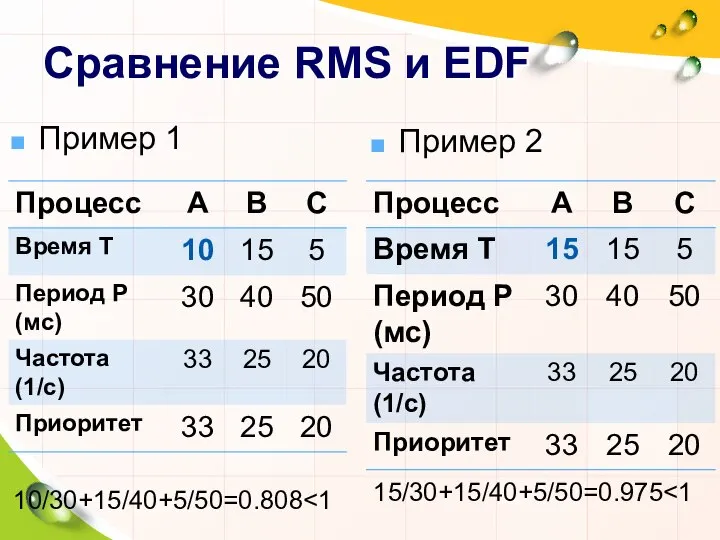
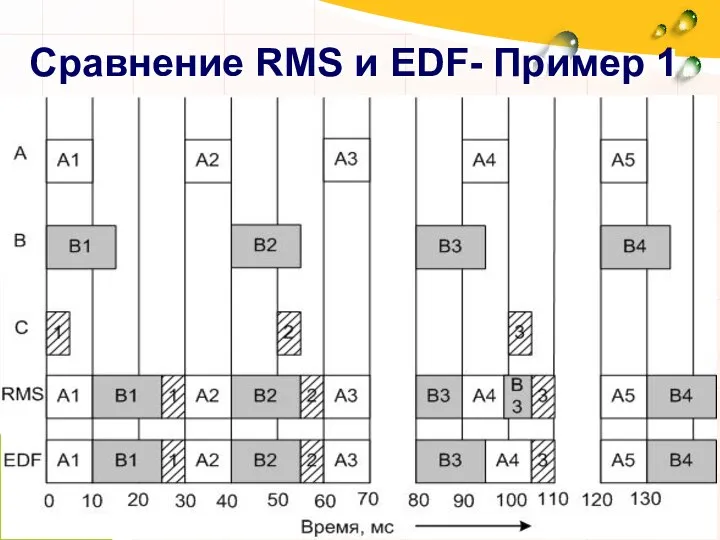
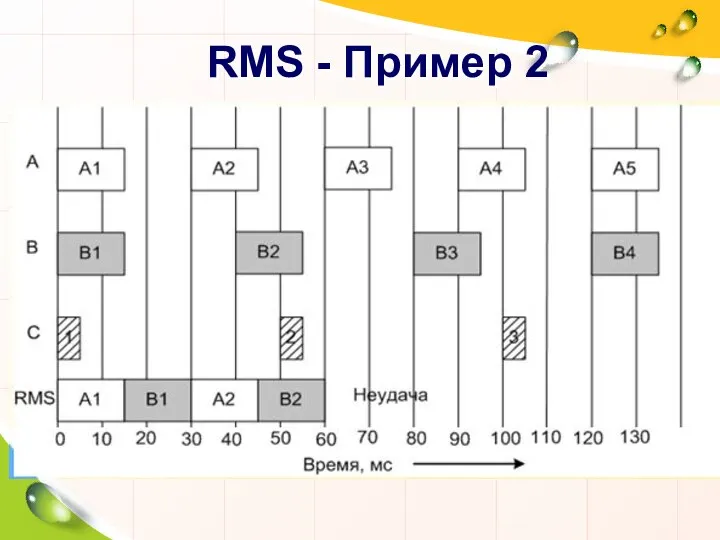
- 36. Сравнение RMS и EDF Пример 1 10/30+15/40+5/50=0.808 Пример 2 15/30+15/40+5/50=0.975
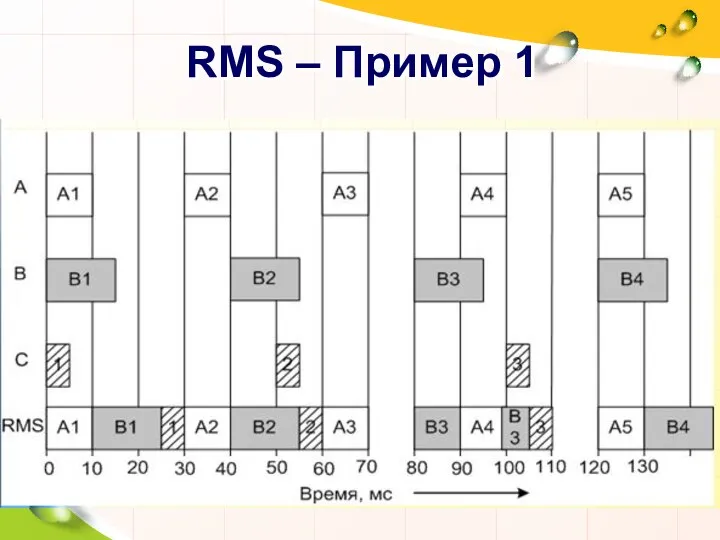
- 37. RMS – Пример 1
- 38. Сравнение RMS и EDF- Пример 1
- 39. RMS - Пример 2
- 41. Скачать презентацию
Слайд 2Основные понятия планирования
Планирование - обеспечение поочередного доступа процессов к одному процессору.
Планировщик -
Основные понятия планирования
Планирование - обеспечение поочередного доступа процессов к одному процессору.
Планировщик -
Слайд 3Основные понятия планирования
Ситуации, когда необходимо планирование:
Когда создается процесс
Когда процесс завершает работу
Когда процесс
Основные понятия планирования
Ситуации, когда необходимо планирование:
Когда создается процесс
Когда процесс завершает работу
Когда процесс
Слайд 4Основные понятия планирования
Виды систем:
Системы пакетной обработки - могут использовать неприоритетный и приоритетный
Основные понятия планирования
Виды систем:
Системы пакетной обработки - могут использовать неприоритетный и приоритетный
Слайд 5Задачи алгоритмов планирования
Для всех систем
Справедливость - каждому процессу справедливую долю процессорного времени
Контроль
Задачи алгоритмов планирования
Для всех систем
Справедливость - каждому процессу справедливую долю процессорного времени
Контроль
Слайд 6Задачи алгоритмов планирования
Системы пакетной обработки
Пропускная способность - количество задач в час
Оборотное время
Задачи алгоритмов планирования
Системы пакетной обработки
Пропускная способность - количество задач в час
Оборотное время
Слайд 7Задачи алгоритмов планирования
Интерактивные системы
Время отклика - быстрая реакция на запросы
Соразмерность - выполнение
Задачи алгоритмов планирования
Интерактивные системы
Время отклика - быстрая реакция на запросы
Соразмерность - выполнение
Слайд 8Основные понятия планирования
Алгоритм планирования без переключений (неприоритетный) - не требует прерывание по
Основные понятия планирования
Алгоритм планирования без переключений (неприоритетный) - не требует прерывание по
Слайд 9Основные понятия планирования
Алгоритм планирования с переключениями (приоритетный) - требует прерывание по аппаратному
Основные понятия планирования
Алгоритм планирования с переключениями (приоритетный) - требует прерывание по аппаратному
Слайд 10Механизмы планирования
Таймер – позволяет отсчитывать время выполнения процесса в процессоре и регулировать
Механизмы планирования
Таймер – позволяет отсчитывать время выполнения процесса в процессоре и регулировать
Слайд 11Планирование в системах пакетной обработки
"Первый пришел - первым обслужен" (FIFO - First
Планирование в системах пакетной обработки
"Первый пришел - первым обслужен" (FIFO - First
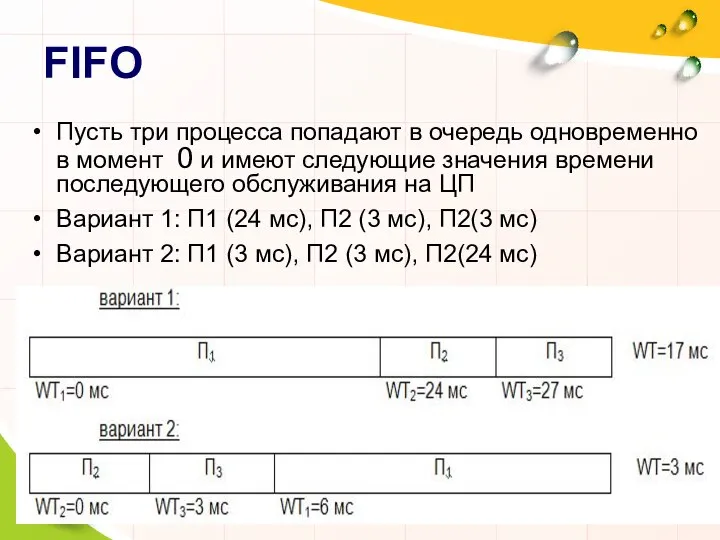
Слайд 12FIFO
Пусть три процесса попадают в очередь одновременно в момент 0 и имеют
FIFO
Пусть три процесса попадают в очередь одновременно в момент 0 и имеют
Слайд 13FIFO
Преимущества:
Простота
Справедливость
Недостатки:
Процесс, ограниченный возможностями процессора может затормозить более быстрые процессы, ограниченные устройствами ввода/вывода.
FIFO
Преимущества:
Простота
Справедливость
Недостатки:
Процесс, ограниченный возможностями процессора может затормозить более быстрые процессы, ограниченные устройствами ввода/вывода.
Слайд 14Кратчайшая задача – первая (SJF – Shortest Job First)
Пусть 4 процесса попадают
Кратчайшая задача – первая (SJF – Shortest Job First)
Пусть 4 процесса попадают
Слайд 15Кратчайшая задача – первая (SJF – Shortest Job First)
Преимущества:
Уменьшение оборотного времени
Справедливость
Недостатки:
Длинный процесс,
Кратчайшая задача – первая (SJF – Shortest Job First)
Преимущества:
Уменьшение оборотного времени
Справедливость
Недостатки:
Длинный процесс,
Слайд 16Наименьшее оставшееся время выполнения (SRT – Shortest Remaining Time)
Аналог SJF, но с
Наименьшее оставшееся время выполнения (SRT – Shortest Remaining Time)
Аналог SJF, но с
Слайд 17Трехуровневое планирование
Трехуровневое планирование
Слайд 18Планирование в интерактивных системах
Циклическое планирование
Планирование в интерактивных системах
Циклическое планирование
Слайд 19Циклическое планирование
Каждому процессу предоставляется квант времени процессора.
Когда квант заканчивается процесс переводится
Циклическое планирование
Каждому процессу предоставляется квант времени процессора.
Когда квант заканчивается процесс переводится
Слайд 20Циклическое планирование
Преимущества:
Простота
Справедливость
Недостатки:
При малом кванте - частые переключения, в результате уменьшение производительности
При большом
Циклическое планирование
Преимущества:
Простота
Справедливость
Недостатки:
При малом кванте - частые переключения, в результате уменьшение производительности
При большом
Слайд 21Приоритетное планирование
Каждому процессу присваивается приоритет, и управление передается процессу с самым высоким
Приоритетное планирование
Каждому процессу присваивается приоритет, и управление передается процессу с самым высоким
Слайд 22Приоритетное планирование
Часто процессы объединяют по приоритетам в группы, и используют
среди групп
Приоритетное планирование
Часто процессы объединяют по приоритетам в группы, и используют
среди групп
Слайд 23Группы с разным квантом времени
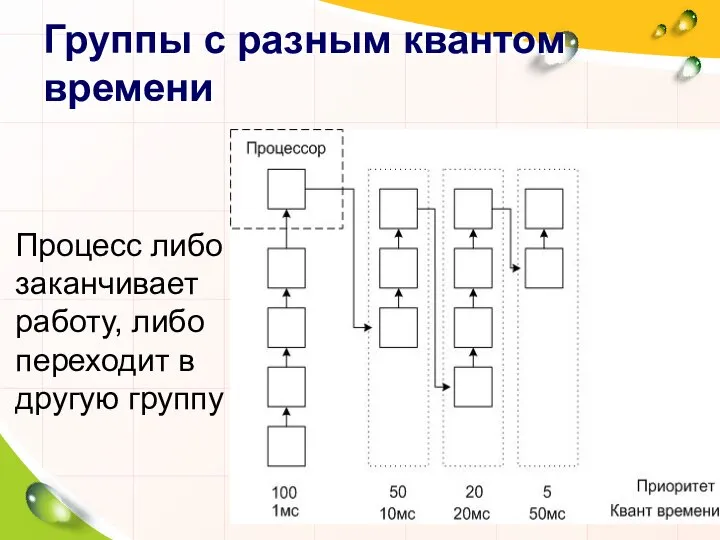
Процесс либо заканчивает работу, либо переходит в другую
Группы с разным квантом времени
Процесс либо заканчивает работу, либо переходит в другую
Слайд 24Группы с разным назначением процессов
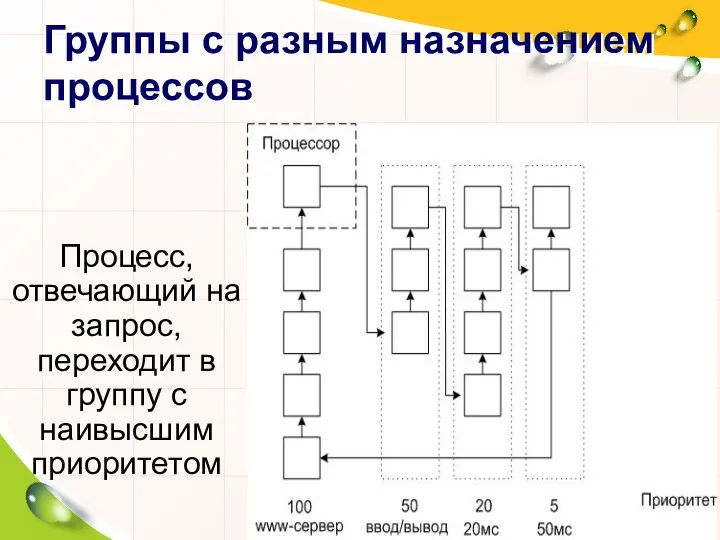
Процесс, отвечающий на запрос, переходит в группу с
Группы с разным назначением процессов
Процесс, отвечающий на запрос, переходит в группу с
Слайд 25Планирование в интерактивных системах
Гарантированное планирование
В системе с n-процессами, каждому процессу будет
Планирование в интерактивных системах
Гарантированное планирование
В системе с n-процессами, каждому процессу будет
Слайд 26Планирование в интерактивных системах
Лотерейное планирование
Процессам раздаются "лотерейные билеты" на доступ к
Планирование в интерактивных системах
Лотерейное планирование
Процессам раздаются "лотерейные билеты" на доступ к
Слайд 27Планирование в системах реального времени
Системы реального времени делятся на:
жесткие (жесткие сроки для
Планирование в системах реального времени
Системы реального времени делятся на:
жесткие (жесткие сроки для
Слайд 28Планирование в системах реального времени
Внешние события, на которые система должна реагировать, делятся:
периодические
Планирование в системах реального времени
Внешние события, на которые система должна реагировать, делятся:
периодические
Слайд 29Планирование в системах реального времени
Чтобы систему реального времени можно было планировать, нужно
Планирование в системах реального времени
Чтобы систему реального времени можно было планировать, нужно
Слайд 30Общее планирование реального времени
Каждый процесс борется за процессор со своим заданием и
Общее планирование реального времени
Каждый процесс борется за процессор со своим заданием и
Слайд 31Общее планирование реального времени
Планировщик должен знать:
Частоту , с которой должен работать процесс
объем
Общее планирование реального времени
Планировщик должен знать:
Частоту , с которой должен работать процесс
объем
Слайд 32Общее планирование реального времени
Пример: имеются 3 периодических процесса.
Процесс А запускается каждые 30мс,
Общее планирование реального времени
Пример: имеются 3 периодических процесса.
Процесс А запускается каждые 30мс,
Слайд 33Общее планирование реального времени
Общее планирование реального времени
Слайд 34Общее планирование реального времени
Различают 2 алгоритма планирования в системах реального времени:
Статический алгоритм
Общее планирование реального времени
Различают 2 алгоритма планирования в системах реального времени:
Статический алгоритм
Слайд 35Алгоритм планирования RMS
Процессы должны удовлетворять условиям:
Процесс должен быть завершен за время его
Алгоритм планирования RMS
Процессы должны удовлетворять условиям:
Процесс должен быть завершен за время его
Слайд 36Сравнение RMS и EDF
Пример 1
10/30+15/40+5/50=0.808<1
Пример 2
15/30+15/40+5/50=0.975<1
Сравнение RMS и EDF
Пример 1
10/30+15/40+5/50=0.808<1
Пример 2
15/30+15/40+5/50=0.975<1
Слайд 37RMS – Пример 1
RMS – Пример 1
Слайд 38Сравнение RMS и EDF- Пример 1
Сравнение RMS и EDF- Пример 1
Слайд 39RMS - Пример 2
RMS - Пример 2
 Чек-лист по канве
Чек-лист по канве Презентация на тему Компьютерные сети Локальная сеть
Презентация на тему Компьютерные сети Локальная сеть  Обзор программных продуктов дистрибутива Линукс Юниор
Обзор программных продуктов дистрибутива Линукс Юниор Файлы и файловые структуры
Файлы и файловые структуры 04 Классы
04 Классы Keep It Green — списки дел без занудства
Keep It Green — списки дел без занудства Символьные строки. Поиск и замена в символьных строках
Символьные строки. Поиск и замена в символьных строках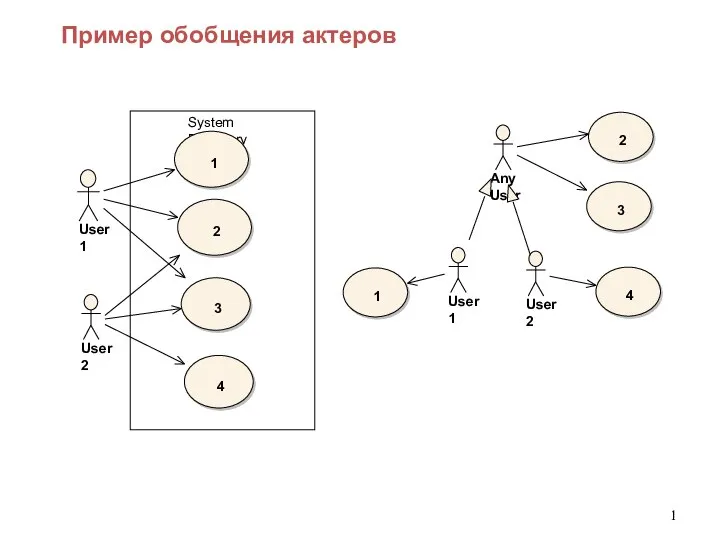 Диаграмма прецедентов в UML
Диаграмма прецедентов в UML Инжиниринг биотехнологических процессов и систем. (Лекция 1)
Инжиниринг биотехнологических процессов и систем. (Лекция 1) Система управления базами данных Access
Система управления базами данных Access Алгоритм работы с кейсом
Алгоритм работы с кейсом Олимпиадное программирование
Олимпиадное программирование Моделирование состояния биметаллических конструкций
Моделирование состояния биметаллических конструкций PowerPoint. Сабақ тақырыбы/Обобщающий урок по предмету информатика
PowerPoint. Сабақ тақырыбы/Обобщающий урок по предмету информатика Электронные таблицы Excel
Электронные таблицы Excel Конструирование программного обеспечения (2021 - 2022). Лекция 25
Конструирование программного обеспечения (2021 - 2022). Лекция 25 Стандартизация и сертификация
Стандартизация и сертификация Презентация на тему Мониторы
Презентация на тему Мониторы  Информационные технологии: Информация
Информационные технологии: Информация Автоматизированное рабочее место юриста
Автоматизированное рабочее место юриста Структура XML
Структура XML SMM-менеджмент. Работаем из дома
SMM-менеджмент. Работаем из дома Онлайн-профессия: инфопродюсер
Онлайн-профессия: инфопродюсер 10u-1_Информация
10u-1_Информация Система цветопередачи CMYK
Система цветопередачи CMYK Создание HTML - документов
Создание HTML - документов Информационная безопасность
Информационная безопасность Графическое изображение
Графическое изображение