- Разработка авторулевого для морских и речных судов

Содержание
- 2. Коммерческое предложение Цель работы: Разработка авторулевого для морских и речных судов, обеспечивающего гарантированное безопасное маневрирование в
- 3. Основные технические характеристики Автоматическая стабилизация курса с точностью 1° в режиме движения заданным курсом. Использование h2s-сплайновых
- 4. Основные технические характеристики подсистемы маневрирования в узкостях и прохождения фарватеров Вывод судна на траекторию безопасного прохождения
- 5. Пример применения h2s-сплайновых заданных траектории для прохождения узкости и обследования района При формировании заданной траектории ее
- 6. Преимущества h2s-сплайновых заданных траектории ● При использовании традиционных заданных траекторий, состоящих из прямых отрезков и дуг
- 7. Макрокоманды маневрирования Для осуществления безопасного маневрирования в сложной окружающей обстановке обеспечивается немедленное исполнение макрокоманд маневрирования, состоящих
- 8. Прототип - авторулевой «Проводник»
- 9. Прототип - СУ «Свислочь» Режимы управления движением судна, Автоматическое управление движением по исполнительной траектории, которая определяется
- 11. Скачать презентацию
Слайд 2Коммерческое предложение
Цель работы: Разработка авторулевого для морских и речных судов, обеспечивающего гарантированное
Коммерческое предложение
Цель работы: Разработка авторулевого для морских и речных судов, обеспечивающего гарантированное
Слайд 3Основные технические характеристики
Автоматическая стабилизация курса с точностью 1° в режиме движения заданным
Основные технические характеристики
Автоматическая стабилизация курса с точностью 1° в режиме движения заданным
Слайд 4Основные технические характеристики подсистемы маневрирования в узкостях и прохождения фарватеров
Вывод судна
Основные технические характеристики подсистемы маневрирования в узкостях и прохождения фарватеров
Вывод судна
Слайд 5Пример применения h2s-сплайновых заданных траектории для прохождения узкости и обследования района
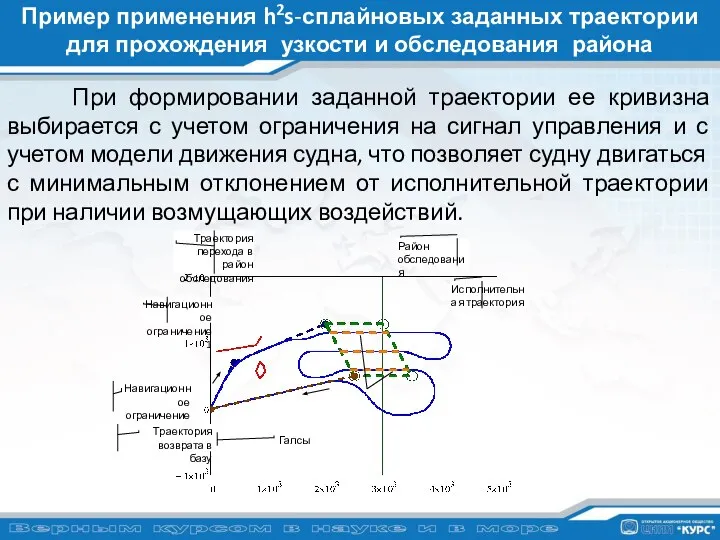
При
Пример применения h2s-сплайновых заданных траектории для прохождения узкости и обследования района
При
Слайд 6Преимущества h2s-сплайновых заданных траектории
● При использовании традиционных заданных траекторий, состоящих из прямых
Преимущества h2s-сплайновых заданных траектории
● При использовании традиционных заданных траекторий, состоящих из прямых
Слайд 7Макрокоманды маневрирования
Для осуществления безопасного маневрирования в сложной окружающей обстановке обеспечивается
Макрокоманды маневрирования
Для осуществления безопасного маневрирования в сложной окружающей обстановке обеспечивается
Слайд 8Прототип - авторулевой «Проводник»
Прототип - авторулевой «Проводник»

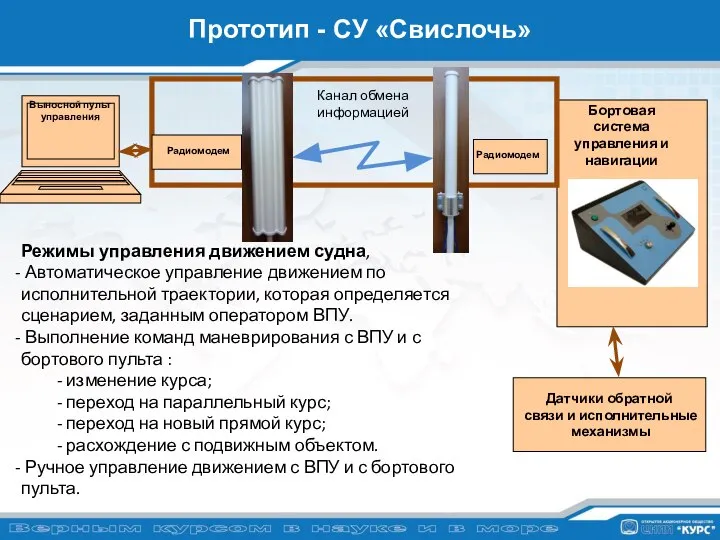
Слайд 9Прототип - СУ «Свислочь»
Режимы управления движением судна,
Автоматическое управление движением по
Прототип - СУ «Свислочь»
Режимы управления движением судна,
Автоматическое управление движением по
 Язык Delphi
Язык Delphi Угрозы в интернете
Угрозы в интернете Закрепление материала о документах Microsoft Word
Закрепление материала о документах Microsoft Word Организация безопасного электронного документооборота между корпоративными обслуживающими банками
Организация безопасного электронного документооборота между корпоративными обслуживающими банками Модель взаимодействия
Модель взаимодействия Бой коробля и субмарины
Бой коробля и субмарины Виды пк в будущем
Виды пк в будущем Видеовозвраты в viber
Видеовозвраты в viber О проектах
О проектах Операционная система
Операционная система Интернет-магазин в Петербурге
Интернет-магазин в Петербурге البرامج الضارة التي تصيب الحاسوب
البرامج الضارة التي تصيب الحاسوب Как запланировать онлайн лекцию
Как запланировать онлайн лекцию Создание сайта
Создание сайта Презентация на тему Многоуровневые списки
Презентация на тему Многоуровневые списки  Решение задачи оптимального планирования с применением электронных таблиц
Решение задачи оптимального планирования с применением электронных таблиц Информатика. Техника безопасности. Информация и знания
Информатика. Техника безопасности. Информация и знания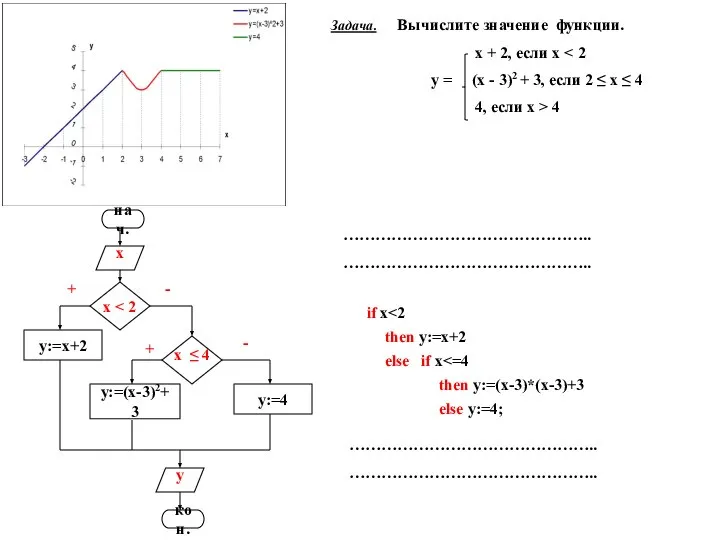 Вложенные ветвления
Вложенные ветвления Примеры оформления экскурсионных табличек
Примеры оформления экскурсионных табличек Контент. Типы контента
Контент. Типы контента Выбор по для выполнения сечений и разрезов 2D объекта
Выбор по для выполнения сечений и разрезов 2D объекта Персональное информационное пространство
Персональное информационное пространство 12_Строки
12_Строки Разработка информационной базы автоматизированной обучающей системы подготовки специалистов связи
Разработка информационной базы автоматизированной обучающей системы подготовки специалистов связи Семисегментный индикатор
Семисегментный индикатор Электронные таблицы. Обработка числовой информации в электронных таблицах
Электронные таблицы. Обработка числовой информации в электронных таблицах Базы данных тема урока: реляционная модель данных. Математическое описание базы данных. Нормализация. Реляционная модель данных
Базы данных тема урока: реляционная модель данных. Математическое описание базы данных. Нормализация. Реляционная модель данных AJAX. Определение страны по IP-адресу. (Часть 2)
AJAX. Определение страны по IP-адресу. (Часть 2)