- Синтез цифровой системы автоматического регулирования угловой скорости электродвигателя

Содержание
- 2. Цель работы Техническая цель работы: практическое освоение принципов дискретно-цифрового автоматического управления непрерывным объектом. Для этой цели
- 3. 2. Учебное задание а) Разработка математической модели по функциональной и принципиальной схемам системы. б) Ознакомление с
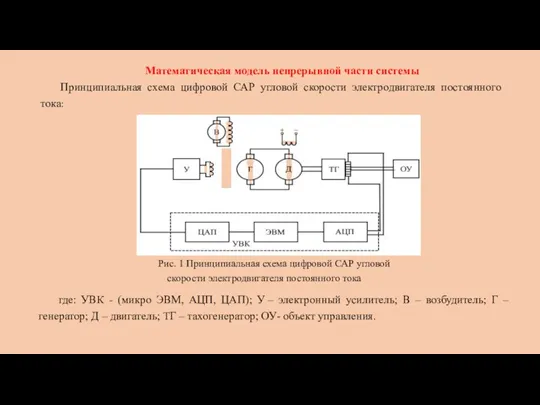
- 4. Математическая модель непрерывной части системы Принципиальная схема цифровой САР угловой скорости электродвигателя постоянного тока: где: УВК
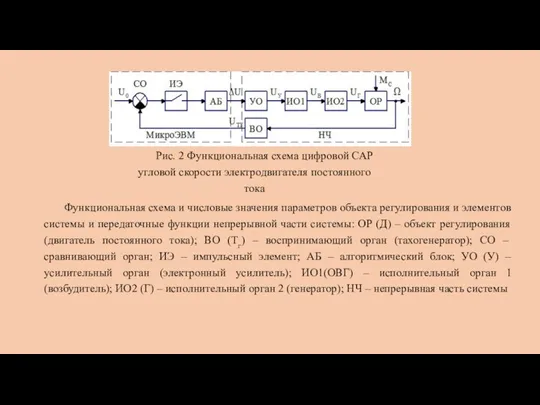
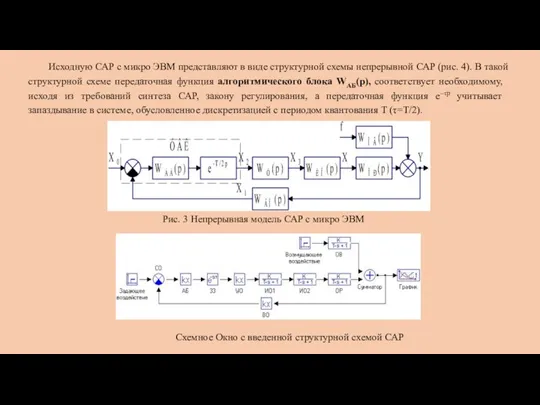
- 5. Рис. 2 Функциональная схема цифровой САР угловой скорости электродвигателя постоянного тока Функциональная схема и числовые значения
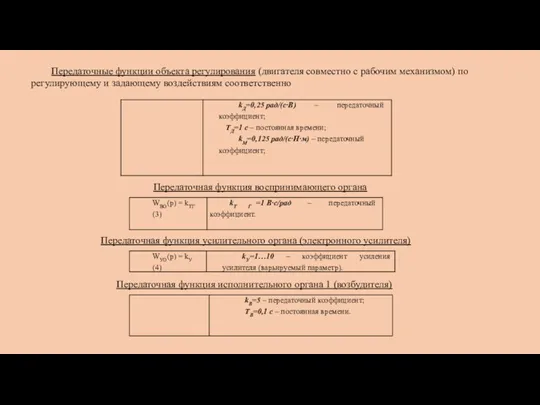
- 6. Передаточные функции объекта регулирования (двигателя совместно с рабочим механизмом) по регулирующему и задающему воздействиям соответственно Передаточная
- 7. Передаточная функция исполнительного органа 2 (генератора)
- 8. Исходную САР с микро ЭВМ представляют в виде структурной схемы непрерывной САР (рис. 4). В такой
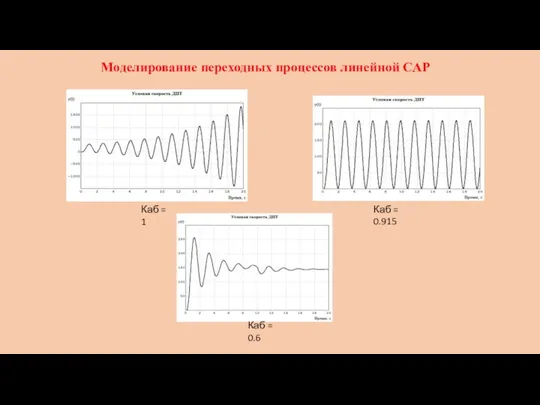
- 9. Моделирование переходных процессов линейной САР Каб = 1 Каб = 0.915 Каб = 0.6
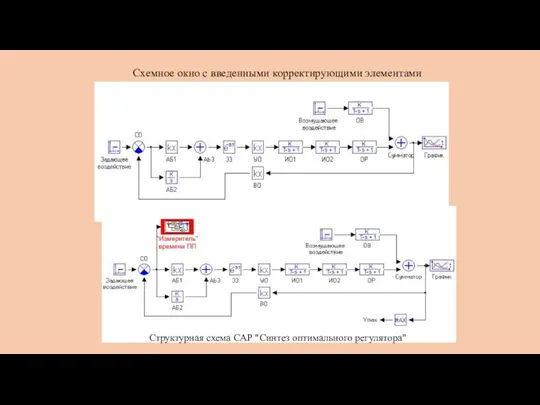
- 10. Схемное окно с введенными корректирующими элементами Структурная схема САР "Синтез оптимального регулятора"
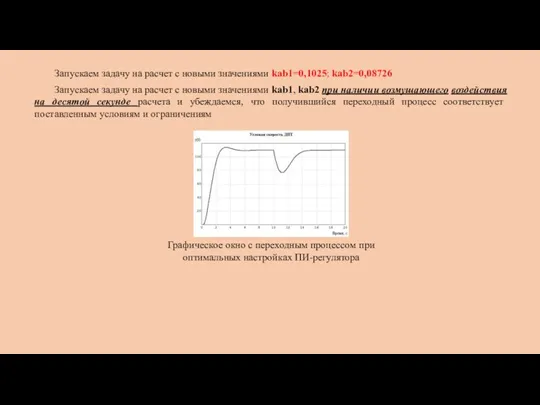
- 11. Запускаем задачу на расчет с новыми значениями kab1=0,1025; kab2=0,08726 Запускаем задачу на расчет с новыми значениями
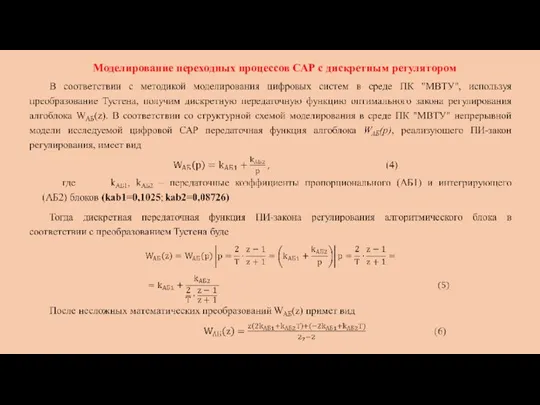
- 12. Моделирование переходных процессов САР с дискретным регулятором
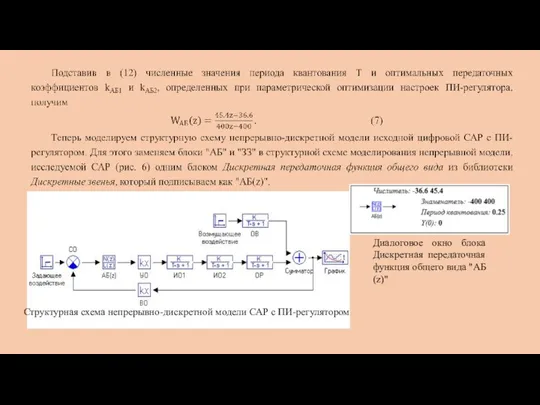
- 13. Структурная схема непрерывно-дискретной модели САР с ПИ-регулятором Диалоговое окно блока Дискретная передаточная функция общего вида "АБ(z)"
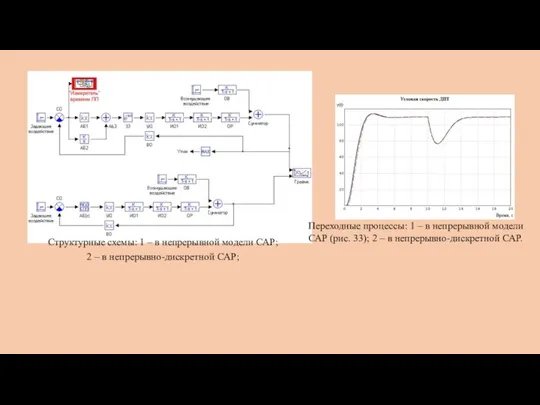
- 14. Структурные схемы: 1 – в непрерывной модели САР; 2 – в непрерывно-дискретной САР; Переходные процессы: 1
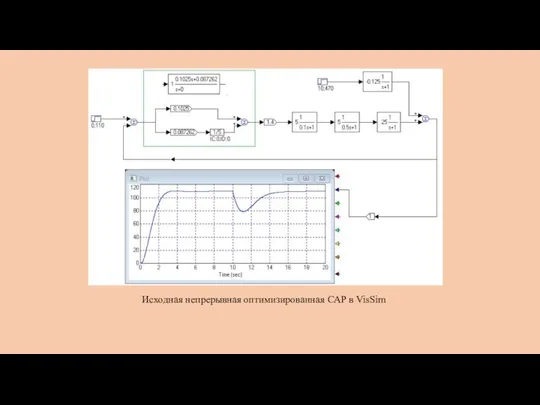
- 15. Исходная непрерывная оптимизированная САР в VisSim
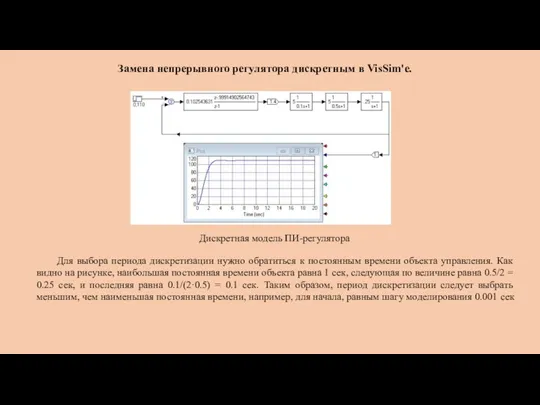
- 16. Замена непрерывного регулятора дискретным в VisSim'е. Для выбора периода дискретизации нужно обратиться к постоянным времени объекта
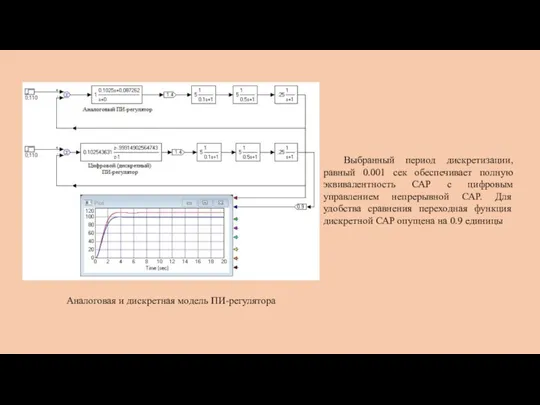
- 17. Аналоговая и дискретная модель ПИ-регулятора Выбранный период дискретизации, равный 0.001 сек обеспечивает полную эквивалентность САР с
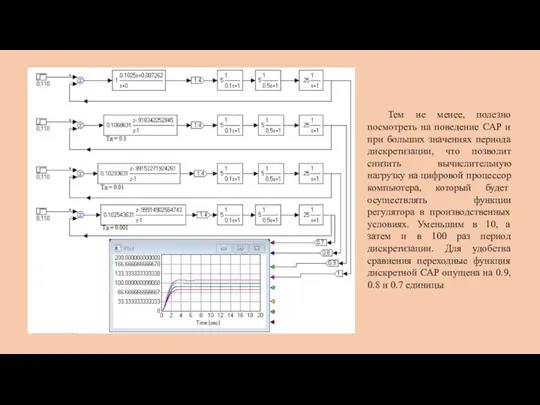
- 18. Тем не менее, полезно посмотреть на поведение САР и при больших значениях периода дискретизации, что позволит
- 19. Определение алгоритма работы цифрового регулятора На цифровой регулятор подается непрерывный сигнал ошибки с устройства сравнения (сумматора).
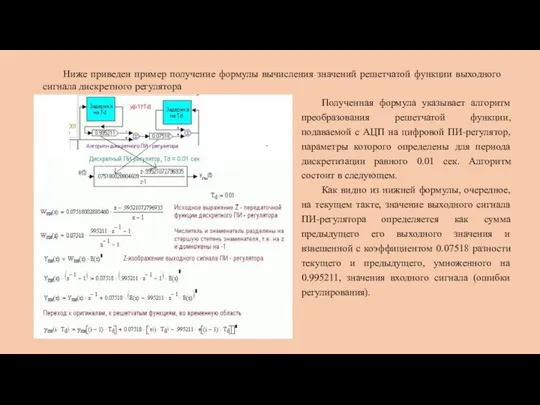
- 20. Ниже приведен пример получение формулы вычисления значений решетчатой функции выходного сигнала дискретного регулятора Полученная формула указывает
- 22. Скачать презентацию
Слайд 2Цель работы
Техническая цель работы: практическое освоение принципов дискретно-цифрового автоматического управления непрерывным объектом.
Для
Цель работы
Техническая цель работы: практическое освоение принципов дискретно-цифрового автоматического управления непрерывным объектом.
Для
Слайд 32. Учебное задание
а) Разработка математической модели по функциональной и принципиальной схемам системы.
2. Учебное задание
а) Разработка математической модели по функциональной и принципиальной схемам системы.
Слайд 4Математическая модель непрерывной части системы
Принципиальная схема цифровой САР угловой скорости электродвигателя постоянного
Математическая модель непрерывной части системы
Принципиальная схема цифровой САР угловой скорости электродвигателя постоянного
Слайд 5Рис. 2 Функциональная схема цифровой САР угловой скорости электродвигателя постоянного тока
Функциональная схема
Рис. 2 Функциональная схема цифровой САР угловой скорости электродвигателя постоянного тока
Функциональная схема
Слайд 6 Передаточные функции объекта регулирования (двигателя совместно с рабочим механизмом) по регулирующему
Передаточные функции объекта регулирования (двигателя совместно с рабочим механизмом) по регулирующему
Слайд 7Передаточная функция исполнительного органа 2 (генератора)
Передаточная функция исполнительного органа 2 (генератора)

Слайд 8Исходную САР с микро ЭВМ представляют в виде структурной схемы непрерывной САР
Исходную САР с микро ЭВМ представляют в виде структурной схемы непрерывной САР
Слайд 9Моделирование переходных процессов линейной САР
Каб = 1
Каб = 0.915
Каб = 0.6
Моделирование переходных процессов линейной САР
Каб = 1
Каб = 0.915
Каб = 0.6
Слайд 10Схемное окно с введенными корректирующими элементами
Структурная схема САР "Синтез оптимального регулятора"
Схемное окно с введенными корректирующими элементами
Структурная схема САР "Синтез оптимального регулятора"
Слайд 11 Запускаем задачу на расчет с новыми значениями kab1=0,1025; kab2=0,08726
Запускаем задачу на
Запускаем задачу на расчет с новыми значениями kab1=0,1025; kab2=0,08726
Запускаем задачу на
Слайд 12Моделирование переходных процессов САР с дискретным регулятором
Моделирование переходных процессов САР с дискретным регулятором
Слайд 13
Структурная схема непрерывно-дискретной модели САР с ПИ-регулятором
Диалоговое окно блока Дискретная передаточная функция
Структурная схема непрерывно-дискретной модели САР с ПИ-регулятором
Диалоговое окно блока Дискретная передаточная функция
Слайд 14Структурные схемы: 1 – в непрерывной модели САР;
2 – в непрерывно-дискретной САР;
Переходные
Структурные схемы: 1 – в непрерывной модели САР;
2 – в непрерывно-дискретной САР;
Переходные
Слайд 15Исходная непрерывная оптимизированная САР в VisSim
Исходная непрерывная оптимизированная САР в VisSim
Слайд 16Замена непрерывного регулятора дискретным в VisSim'е.
Для выбора периода дискретизации нужно обратиться к
Замена непрерывного регулятора дискретным в VisSim'е.
Для выбора периода дискретизации нужно обратиться к
Слайд 17Аналоговая и дискретная модель ПИ-регулятора
Выбранный период дискретизации, равный 0.001 сек обеспечивает полную
Аналоговая и дискретная модель ПИ-регулятора
Выбранный период дискретизации, равный 0.001 сек обеспечивает полную
Слайд 18 Тем не менее, полезно посмотреть на поведение САР и при больших значениях
Тем не менее, полезно посмотреть на поведение САР и при больших значениях
Слайд 19Определение алгоритма работы цифрового регулятора
На цифровой регулятор подается непрерывный сигнал ошибки с
Определение алгоритма работы цифрового регулятора
На цифровой регулятор подается непрерывный сигнал ошибки с
Слайд 20 Ниже приведен пример получение формулы вычисления значений решетчатой функции выходного сигнала дискретного
Ниже приведен пример получение формулы вычисления значений решетчатой функции выходного сигнала дискретного
 Нейросети. Создание приложения с помощью нейросетей
Нейросети. Создание приложения с помощью нейросетей Компьютерные игры
Компьютерные игры Как ставить статусы в зен?
Как ставить статусы в зен? Проектирование и разработка информационной системы для автоматизации работы кассира
Проектирование и разработка информационной системы для автоматизации работы кассира Разработка игры под Android
Разработка игры под Android ШАРП. Приложение для международного общения
ШАРП. Приложение для международного общения Безопасный интернет
Безопасный интернет Файловая система
Файловая система Перевод чисел из одной системы счисления в другую
Перевод чисел из одной системы счисления в другую Файловые менеджеры
Файловые менеджеры Никнеймы. Что они могут рассказать о человеке?
Никнеймы. Что они могут рассказать о человеке? Интернет как один из источников информационного обеспечения фундаментальных и прикладных научных исследований
Интернет как один из источников информационного обеспечения фундаментальных и прикладных научных исследований Как прикрепить задание в системе Сетевой город. Образование
Как прикрепить задание в системе Сетевой город. Образование git
git Основы Kotlin
Основы Kotlin Компоненты информационных технологий. Тема 1.2
Компоненты информационных технологий. Тема 1.2 Условный оператор
Условный оператор Форма для поиска уже существующих статей блога “Blog search form”
Форма для поиска уже существующих статей блога “Blog search form” Ассортиментная идентификация продовольственных товаров
Ассортиментная идентификация продовольственных товаров Презентация на тему Типы информационных моделей
Презентация на тему Типы информационных моделей  Развитие систем подвижной связи к 5G
Развитие систем подвижной связи к 5G Информация и информационные процессы. Тест
Информация и информационные процессы. Тест Инструкция по работе с личным кабинетом автора в eLibrary.ru
Инструкция по работе с личным кабинетом автора в eLibrary.ru Системы счисления (СС)
Системы счисления (СС) Российская СПС Консультант Плюс. Лекция 22
Российская СПС Консультант Плюс. Лекция 22 Библиографическая запись
Библиографическая запись Нумерация договоров и заказов в рамках ТО АМС
Нумерация договоров и заказов в рамках ТО АМС Правила работы на компьютере (1 класс)
Правила работы на компьютере (1 класс)