- Система вибору та візуалізації найкоротшого маршруту при переміщенні об’єкта у приміщенні

Содержание
- 2. Актуальнicть роботи Безліч завдань оптимізації пов'язана саме з пошуком найкоротших шляхів. Алгоритми пошуку найкоротших шляхів поділяються
- 3. Об'єкт та предмет дослідження Предметом дослідження магістерської роботи є моделі та алгоритми пошуку найкоротшого шляху між
- 4. Мета і завдання дослідження Для досягнення мети в магістерській роботі поставлені і вирішені наступні завдання: провести
- 5. Практичне значення отриманих результатів Практичне значення отриманих результатів дослідження полягає в наступному: Було проведено тестування розроблених
- 6. Аналіз методів вирішення проблеми До найбільш популярних алгоритмів пошуку маршруту в графі можна віднести: Алгоритм Дейкстри
- 7. Алгоритм Джонсона знаходить найкоротші шляхи між усіма парами вершин зваженого орієнтованого графа; Алгоритм Лі (хвильовий алгоритм)
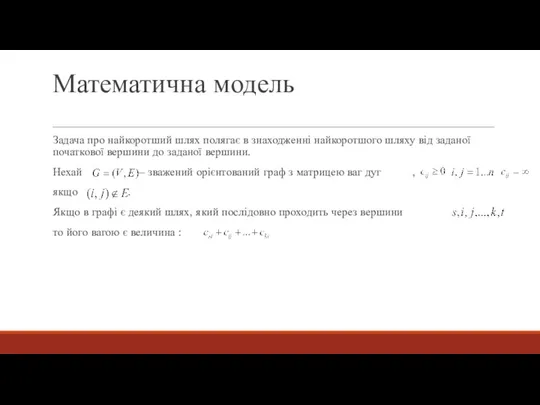
- 8. Математична модель Задача про найкоротший шлях полягає в знаходженні найкоротшого шляху від заданої початкової вершини до
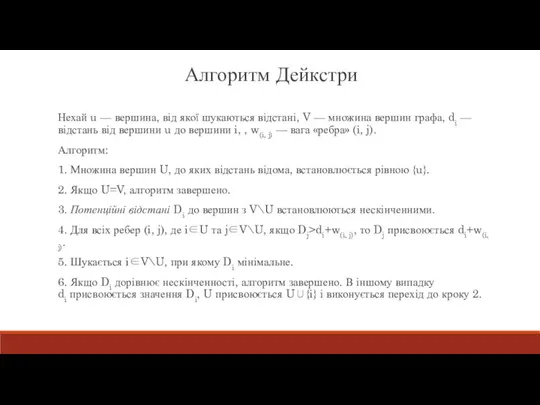
- 9. Нехай u — вершина, від якої шукаються відстані, V — множина вершин графа, di — відстань
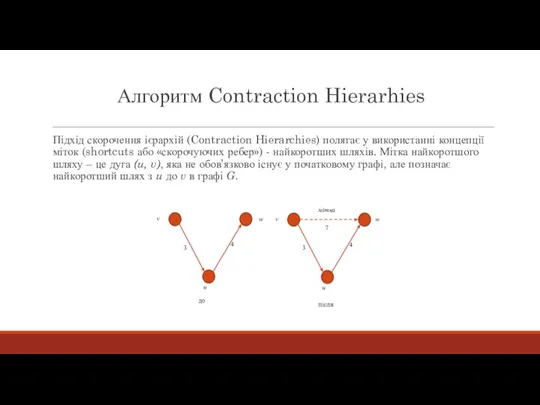
- 10. Алгоритм Contraction Hierarhies Підхід скорочення ієрархій (Contraction Hierarchies) полягає у використанні концепції міток (shortcuts або «скорочуючих
- 11. Проектна модель Моделювання будь-якої системи супроводжується створенням множини моделей для відображення різних аспектів системи. Моделі можуть
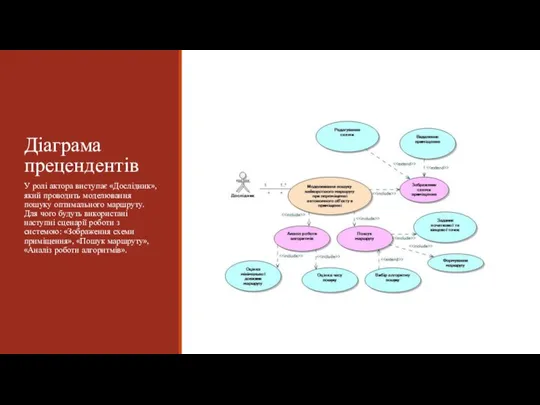
- 12. Діаграма прецендентів У ролі актора виступає «Дослідник», який проводить моделювання пошуку оптимального маршруту. Для чого будуть
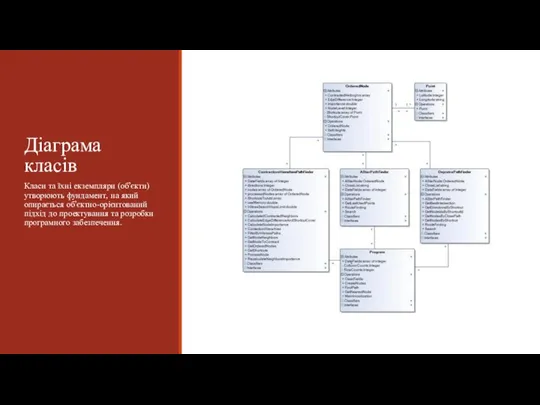
- 13. Діаграма класів Класи та їхні екземпляри (об’єкти) утворюють фундамент, на який опирається об’єктно-орієнтований підхід до проектування
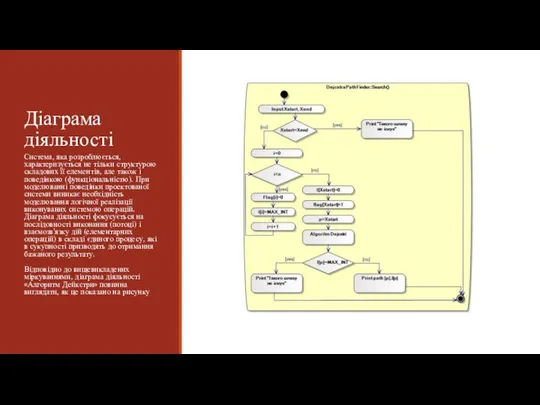
- 14. Діаграма діяльності Система, яка розроблюється, характеризується не тільки структурою складових її елементів, але також і поведінкою
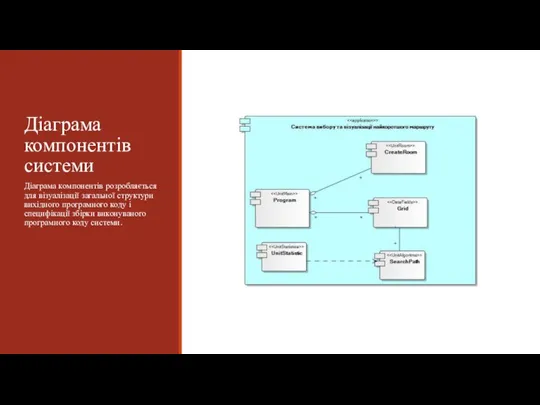
- 15. Діаграма компонентів системи Діаграма компонентів розробляється для візуалізації загальної структури вихідного програмного коду і специфікації збірки
- 16. Інформаційне забезпечення Програмний продукт реалізовано на платформі .Net, мові програмування С# та технології WPF. В якості
- 17. Сутність дослідження Дослідження полягало в порівнянні алгоритмів Дейкстри, А* і Contraction hierarchies для невеликого приміщення. Для
- 18. Маршрут №1. Діагональний маршрут – від лівої верхньої клітини до правої нижньої клітини. Довжина 40 м.
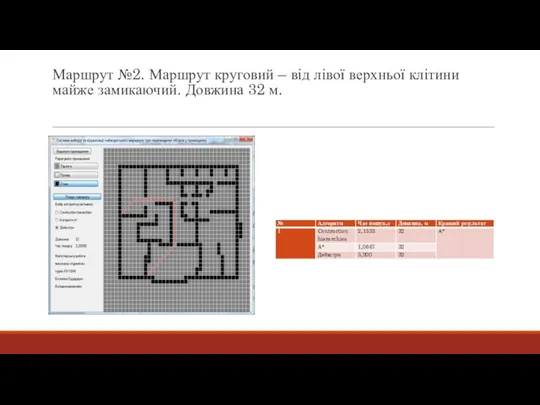
- 19. Маршрут №2. Маршрут круговий – від лівої верхньої клітини майже замикаючий. Довжина 32 м.
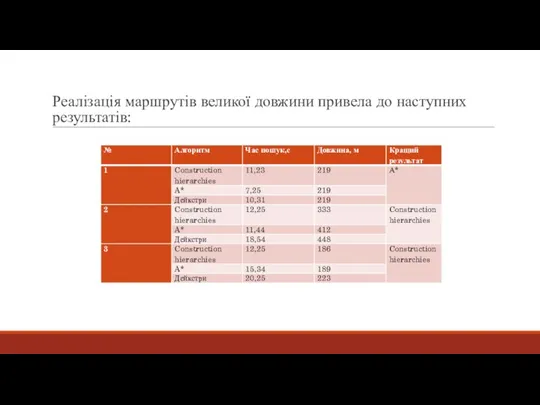
- 20. Реалізація маршрутів великої довжини привела до наступних результатів:
- 21. Висновки Поставлена мета дослідження досягнута. Розроблені моделі пошуку найкоротшого маршруту при пересуванні об’єкту в приміщенні, спрямовані
- 23. Скачать презентацию
Слайд 2Актуальнicть роботи
Безліч завдань оптимізації пов'язана саме з пошуком найкоротших шляхів.
Алгоритми пошуку
Актуальнicть роботи
Безліч завдань оптимізації пов'язана саме з пошуком найкоротших шляхів.
Алгоритми пошуку
Слайд 3Об'єкт та предмет дослідження
Предметом дослідження магістерської роботи є моделі та алгоритми
Об'єкт та предмет дослідження
Предметом дослідження магістерської роботи є моделі та алгоритми
Слайд 4Мета і завдання дослідження
Для досягнення мети в магістерській роботі поставлені і вирішені
Мета і завдання дослідження
Для досягнення мети в магістерській роботі поставлені і вирішені
Слайд 5Практичне значення отриманих результатів
Практичне значення отриманих результатів дослідження полягає в наступному:
Було
Практичне значення отриманих результатів
Практичне значення отриманих результатів дослідження полягає в наступному:
Було
Слайд 6Аналіз методів вирішення проблеми
До найбільш популярних алгоритмів пошуку маршруту в графі можна
Аналіз методів вирішення проблеми
До найбільш популярних алгоритмів пошуку маршруту в графі можна
Слайд 7 Алгоритм Джонсона знаходить найкоротші шляхи між усіма парами вершин зваженого орієнтованого
Алгоритм Джонсона знаходить найкоротші шляхи між усіма парами вершин зваженого орієнтованого
Слайд 8Математична модель
Задача про найкоротший шлях полягає в знаходженні найкоротшого шляху від заданої
Математична модель
Задача про найкоротший шлях полягає в знаходженні найкоротшого шляху від заданої
Слайд 9Нехай u — вершина, від якої шукаються відстані, V — множина вершин графа, di — відстань
Нехай u — вершина, від якої шукаються відстані, V — множина вершин графа, di — відстань
Слайд 10Алгоритм Contraction Hierarhies
Підхід скорочення ієрархій (Contraction Hierarchies) полягає у використанні концепції міток
Алгоритм Contraction Hierarhies
Підхід скорочення ієрархій (Contraction Hierarchies) полягає у використанні концепції міток
Слайд 11Проектна модель
Моделювання будь-якої системи супроводжується створенням множини моделей для відображення різних аспектів
Проектна модель
Моделювання будь-якої системи супроводжується створенням множини моделей для відображення різних аспектів
Слайд 12Діаграма прецендентів
У ролі актора виступає «Дослідник», який проводить моделювання пошуку оптимального маршруту.
Діаграма прецендентів
У ролі актора виступає «Дослідник», який проводить моделювання пошуку оптимального маршруту.
Слайд 13Діаграма класів
Класи та їхні екземпляри (об’єкти) утворюють фундамент, на який опирається об’єктно-орієнтований
Діаграма класів
Класи та їхні екземпляри (об’єкти) утворюють фундамент, на який опирається об’єктно-орієнтований
Слайд 14Діаграма діяльності
Система, яка розроблюється, характеризується не тільки структурою складових її елементів,
Діаграма діяльності
Система, яка розроблюється, характеризується не тільки структурою складових її елементів,
Слайд 15Діаграма компонентів системи
Діаграма компонентів розробляється для візуалізації загальної структури вихідного програмного коду
Діаграма компонентів системи
Діаграма компонентів розробляється для візуалізації загальної структури вихідного програмного коду
Слайд 16Інформаційне забезпечення
Програмний продукт реалізовано на платформі .Net, мові програмування С# та технології
Інформаційне забезпечення
Програмний продукт реалізовано на платформі .Net, мові програмування С# та технології
Слайд 17Сутність дослідження
Дослідження полягало в порівнянні алгоритмів Дейкстри, А* і Contraction hierarchies для
Сутність дослідження
Дослідження полягало в порівнянні алгоритмів Дейкстри, А* і Contraction hierarchies для
Слайд 18Маршрут №1. Діагональний маршрут – від лівої верхньої клітини до правої нижньої
Маршрут №1. Діагональний маршрут – від лівої верхньої клітини до правої нижньої

Слайд 19Маршрут №2. Маршрут круговий – від лівої верхньої клітини майже замикаючий. Довжина
Маршрут №2. Маршрут круговий – від лівої верхньої клітини майже замикаючий. Довжина
Слайд 20Реалізація маршрутів великої довжини привела до наступних результатів:
Реалізація маршрутів великої довжини привела до наступних результатів:
Слайд 21Висновки
Поставлена мета дослідження досягнута. Розроблені моделі пошуку найкоротшого маршруту при пересуванні об’єкту
Висновки
Поставлена мета дослідження досягнута. Розроблені моделі пошуку найкоротшого маршруту при пересуванні об’єкту
 Организация комплексной защиты информации от ИТР
Организация комплексной защиты информации от ИТР Шаблон презентации
Шаблон презентации Операционные системы. Классификация процессов ОС
Операционные системы. Классификация процессов ОС Системы счисления: продолжение
Системы счисления: продолжение Разработка программного обеспечения для управления движением мобильной платформы KUKA youBot
Разработка программного обеспечения для управления движением мобильной платформы KUKA youBot Перегрузка операторов
Перегрузка операторов Условный оператор в среде Delphi
Условный оператор в среде Delphi Реактивное программирование
Реактивное программирование Инструментальное программное обеспечение +ИСР
Инструментальное программное обеспечение +ИСР Новостные сообщения по основным новостным каналам
Новостные сообщения по основным новостным каналам Создаем игру Змейка
Создаем игру Змейка Архивация файлов
Архивация файлов Теория перевода (онлайн курс). Как найти
Теория перевода (онлайн курс). Как найти Программирование линейных алгоритмов
Программирование линейных алгоритмов День информатики
День информатики c84ece96-6270-486c-82f2-8f7c50ff0c42 (2)
c84ece96-6270-486c-82f2-8f7c50ff0c42 (2) Общие сведения о САПР
Общие сведения о САПР Информационные и транспортные услуги. 2-курс. Занятие 08
Информационные и транспортные услуги. 2-курс. Занятие 08 Введение в конструирование и проектирование ЭВМ
Введение в конструирование и проектирование ЭВМ Циклические алгоритмы
Циклические алгоритмы Использование пакета Microsoft Office
Использование пакета Microsoft Office Алгоритм ветвления и циклические алгоритмы. 9 класс
Алгоритм ветвления и циклические алгоритмы. 9 класс Создание приложений Windows
Создание приложений Windows Информация для регистрации на mos.ru
Информация для регистрации на mos.ru Архитектура персонального компьютера
Архитектура персонального компьютера Перелік функціональності користувача: бачення проекта та концепції
Перелік функціональності користувача: бачення проекта та концепції Использование информационных технологий в дошкольном образовании
Использование информационных технологий в дошкольном образовании Интерактивные технологии. Облака слов. Форсайт-игра
Интерактивные технологии. Облака слов. Форсайт-игра