- Цикловое управление манипулятором МП-9с c помощью TM-238

Содержание
- 2. Цель работы: Рассмотреть различные подходы к решению одной типовой задачи циклового управления с использованием разных языков
- 3. Цикловое управление манипулятором МП-9с c помощью TM-238 Обеспечить движение схвата манипулятора по замкнутой траектории; Начальная установка
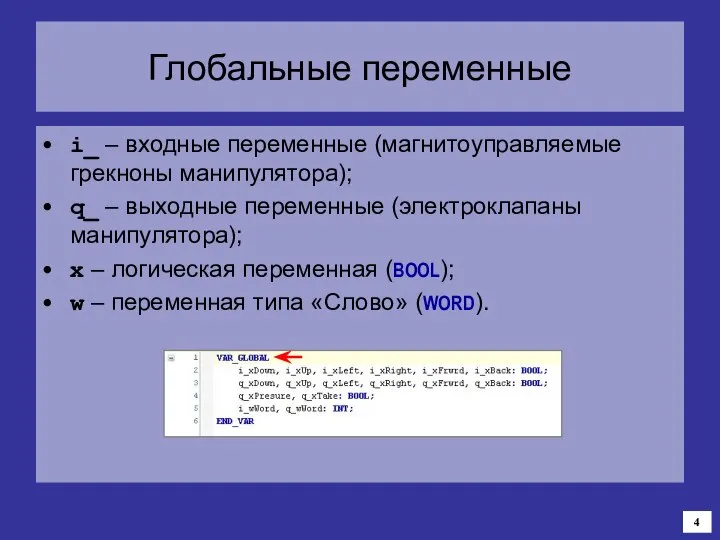
- 4. i_ – входные переменные (магнитоуправляемые грекноны манипулятора); q_ – выходные переменные (электроклапаны манипулятора); x – логическая
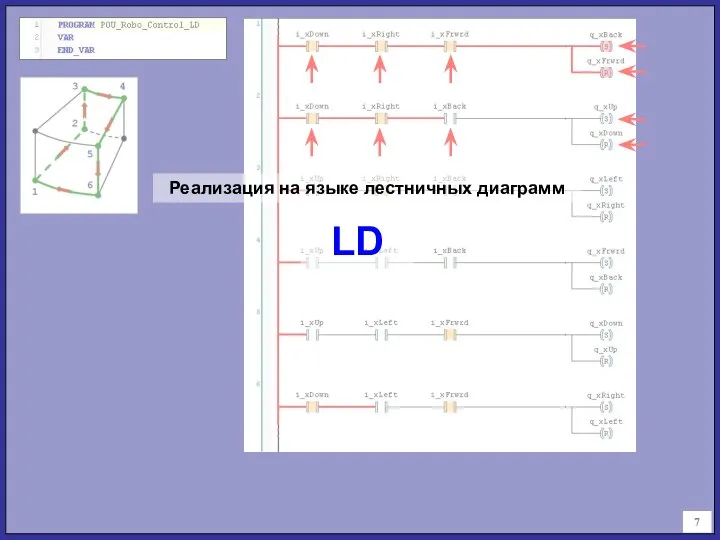
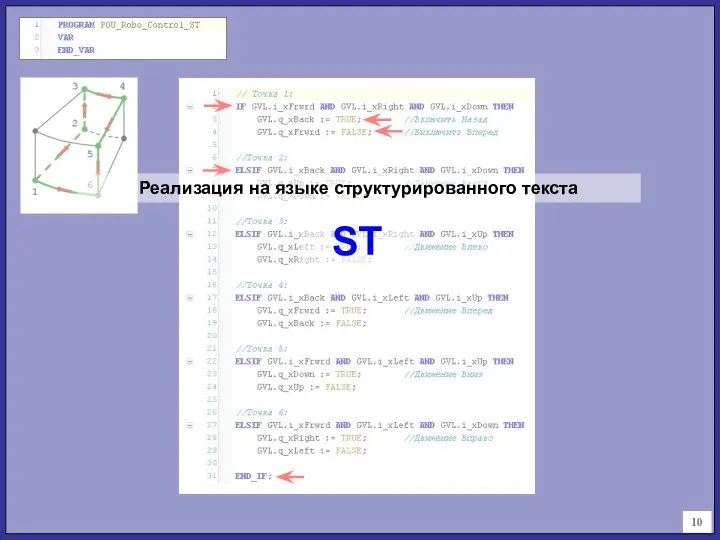
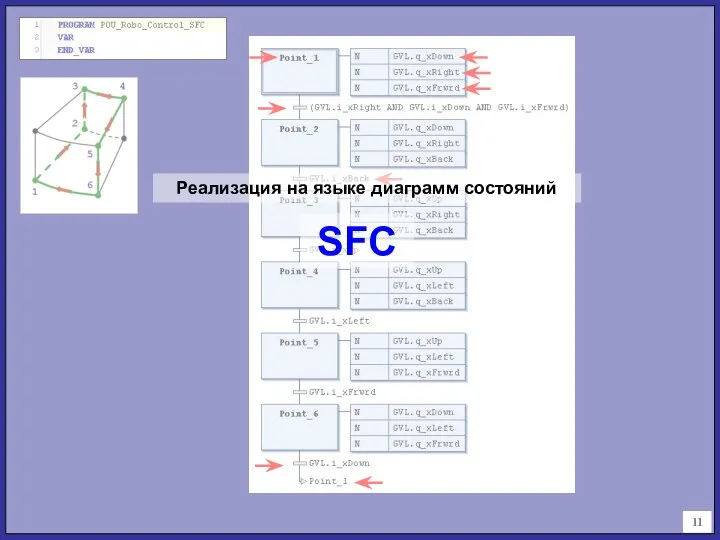
- 5. Базовые варианты реализации Используются глобальные переменные входов/выходов типа BOOL; Локальные вспомогательные переменные не требуются; Определив текущее
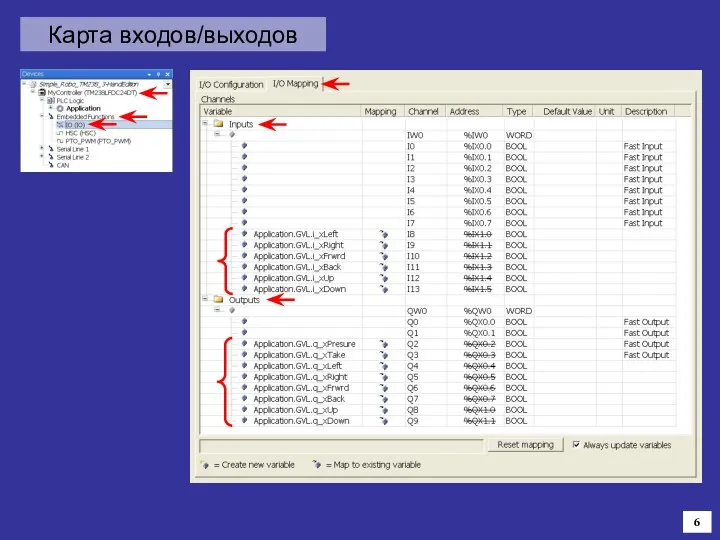
- 6. Карта входов/выходов
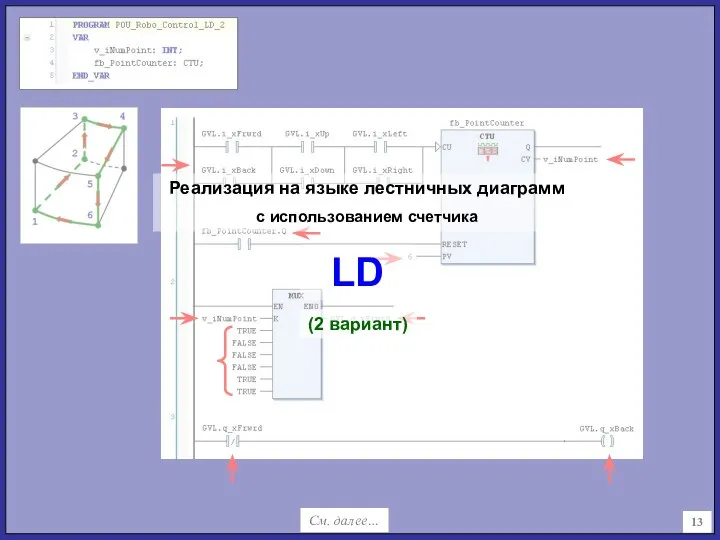
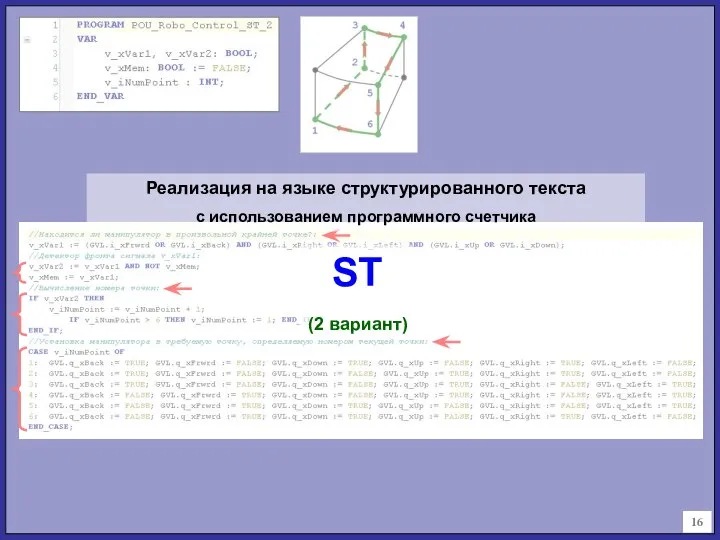
- 12. Дополнительные варианты реализации Возможно использование вспомогательных локальных переменных и функциональных блоков; При попадании в точку траектории
- 13. См. далее…
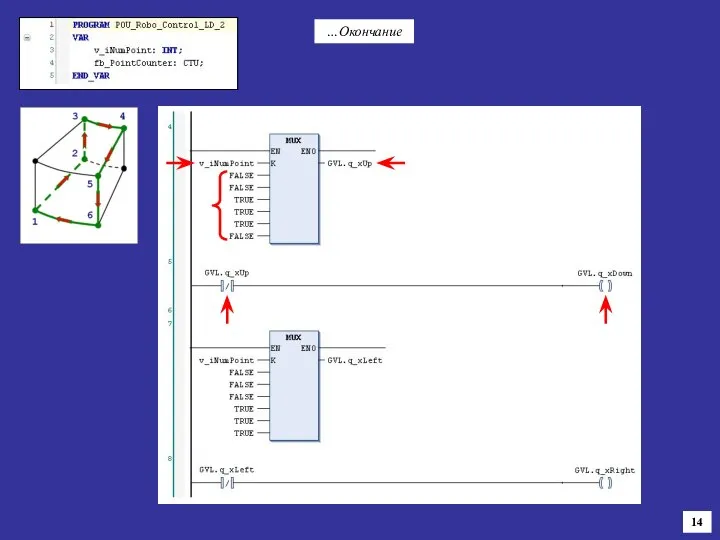
- 14. …Окончание
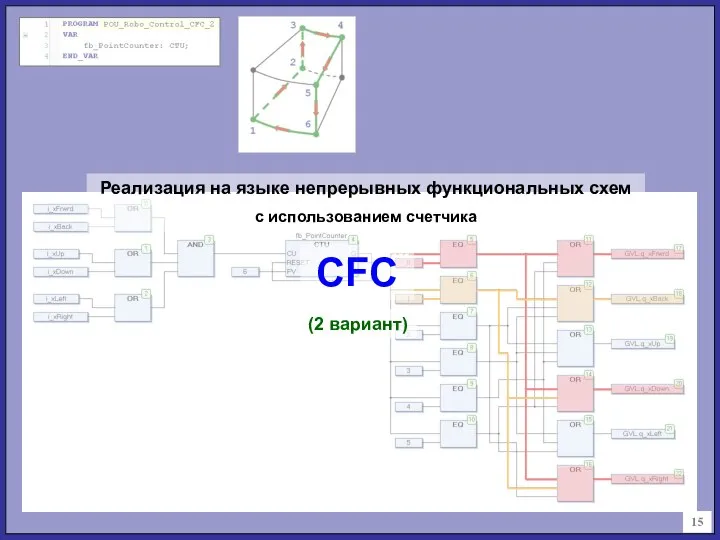
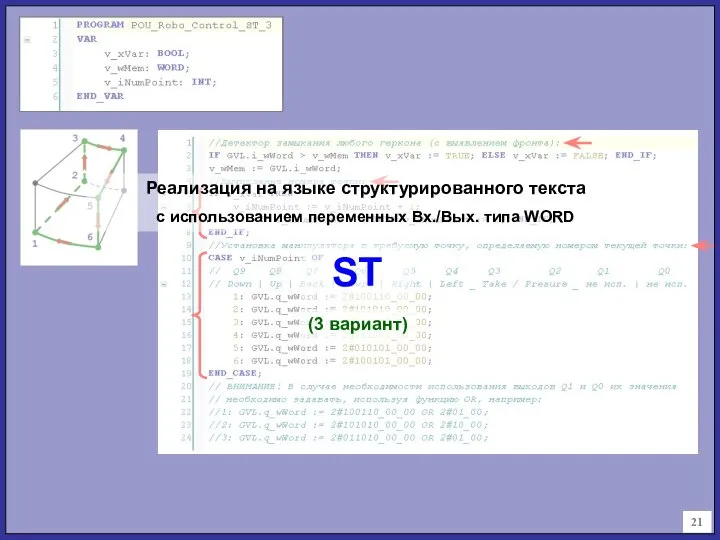
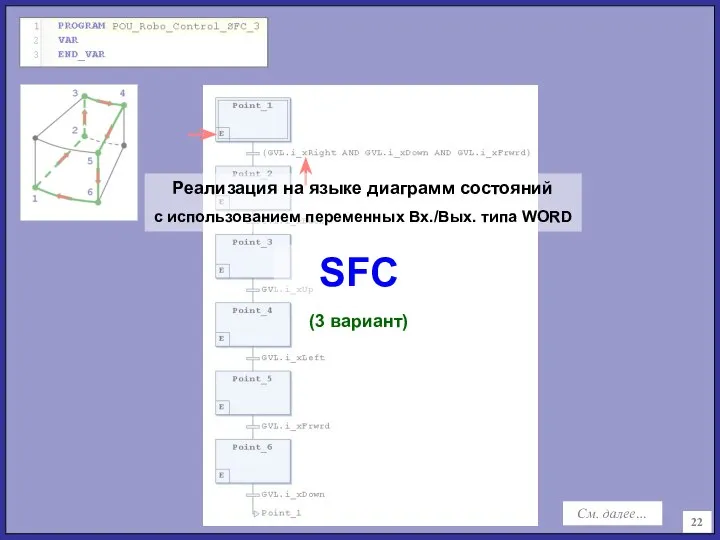
- 17. Дополнительные варианты реализации Используются глобальные переменные входов/выходов типа WORD; Возможно использование вспомогательных локальных переменных и функциональных
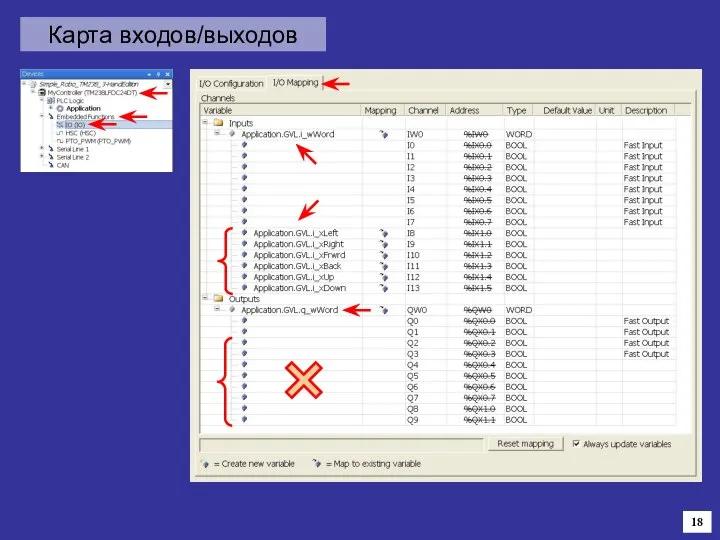
- 18. Карта входов/выходов
- 22. См. далее…
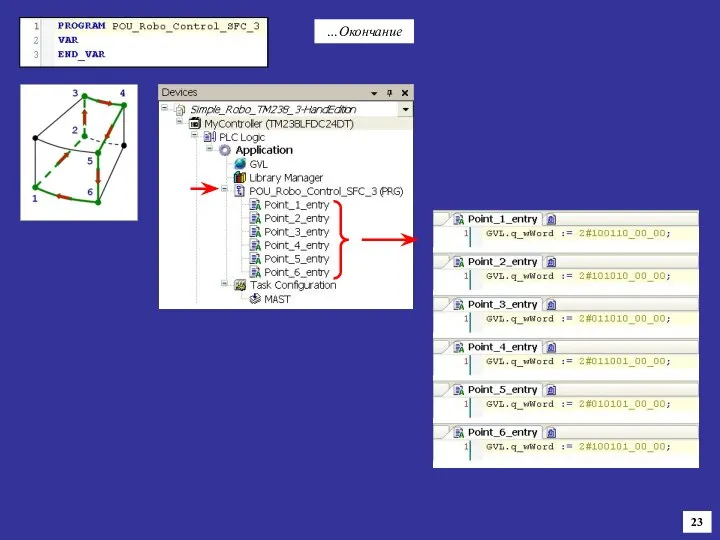
- 23. …Окончание
- 25. Скачать презентацию
Слайд 2Цель работы: Рассмотреть различные подходы к решению одной типовой задачи циклового управления
Цель работы: Рассмотреть различные подходы к решению одной типовой задачи циклового управления
Слайд 3Цикловое управление манипулятором МП-9с
c помощью TM-238
Обеспечить движение схвата манипулятора по замкнутой траектории;
Начальная
Цикловое управление манипулятором МП-9с
c помощью TM-238
Обеспечить движение схвата манипулятора по замкнутой траектории;
Начальная

Слайд 4i_ – входные переменные (магнитоуправляемые грекноны манипулятора);
q_ – выходные переменные (электроклапаны манипулятора);
x
i_ – входные переменные (магнитоуправляемые грекноны манипулятора);
q_ – выходные переменные (электроклапаны манипулятора);
x
Слайд 5Базовые варианты реализации
Используются глобальные переменные входов/выходов типа BOOL;
Локальные вспомогательные переменные не требуются;
Определив
Базовые варианты реализации
Используются глобальные переменные входов/выходов типа BOOL;
Локальные вспомогательные переменные не требуются;
Определив
Слайд 6Карта входов/выходов
Карта входов/выходов


Слайд 12Дополнительные варианты реализации
Возможно использование вспомогательных локальных переменных и функциональных блоков;
При попадании в
Дополнительные варианты реализации
Возможно использование вспомогательных локальных переменных и функциональных блоков;
При попадании в
Слайд 13См. далее…
См. далее…
Слайд 14…Окончание
…Окончание
Слайд 17Дополнительные варианты реализации
Используются глобальные переменные входов/выходов типа WORD;
Возможно использование вспомогательных локальных переменных
Дополнительные варианты реализации
Используются глобальные переменные входов/выходов типа WORD;
Возможно использование вспомогательных локальных переменных
Слайд 18Карта входов/выходов
Карта входов/выходов
Слайд 22См. далее…
См. далее…
Слайд 23…Окончание
…Окончание
 E-learning infographics
E-learning infographics Ребусы по информатике
Ребусы по информатике Схема работы системы штрихкодирования готовой продукции на ОАО КЗСК
Схема работы системы штрихкодирования готовой продукции на ОАО КЗСК Planning the Post Sprawl Era
Planning the Post Sprawl Era Информационные системы и технологии. Работа Сam-систем. Лекция 4
Информационные системы и технологии. Работа Сam-систем. Лекция 4 Построение 3D-моделей с помощью информационных систем. 3D- печать. Практическая работа №4
Построение 3D-моделей с помощью информационных систем. 3D- печать. Практическая работа №4 Программное обеспечение компьютера. Мини - диктант. 8 класс
Программное обеспечение компьютера. Мини - диктант. 8 класс Информационные технологии. Лекция 1
Информационные технологии. Лекция 1 Миссия “Развивай игру”. Проект Форматы игры в футбол 6-12 лет,
Миссия “Развивай игру”. Проект Форматы игры в футбол 6-12 лет, Презентация о презентациях
Презентация о презентациях Организация защиты информационной системы несанкционированного доступа на основе применения СКУД
Организация защиты информационной системы несанкционированного доступа на основе применения СКУД Базы данных. Проверочная работа
Базы данных. Проверочная работа Файл и файловая структура
Файл и файловая структура День отказа от интернета
День отказа от интернета Программа CD Burner XP
Программа CD Burner XP Бомж-Нарратив
Бомж-Нарратив Исследование эффективности применения индексов ColumnStore при выполнении SQL-запросов в Microsoft SQL Server 2016
Исследование эффективности применения индексов ColumnStore при выполнении SQL-запросов в Microsoft SQL Server 2016 Коммуникативные модели в интернете
Коммуникативные модели в интернете Средства связи и массовой информации. Интернет
Средства связи и массовой информации. Интернет Computers in unserem leben
Computers in unserem leben «Что нам стоит сайт построить?!» Рекомендации по созданию сайта (интернет-ресурса) педагога в рамках конкурса профессионального
«Что нам стоит сайт построить?!» Рекомендации по созданию сайта (интернет-ресурса) педагога в рамках конкурса профессионального  Операционная система Android. Введение в объектноориентированное программирование. Модуль 2
Операционная система Android. Введение в объектноориентированное программирование. Модуль 2 Инструкция по регистрации на курсе ПП
Инструкция по регистрации на курсе ПП Как выбрать робота для торговли на Foreх
Как выбрать робота для торговли на Foreх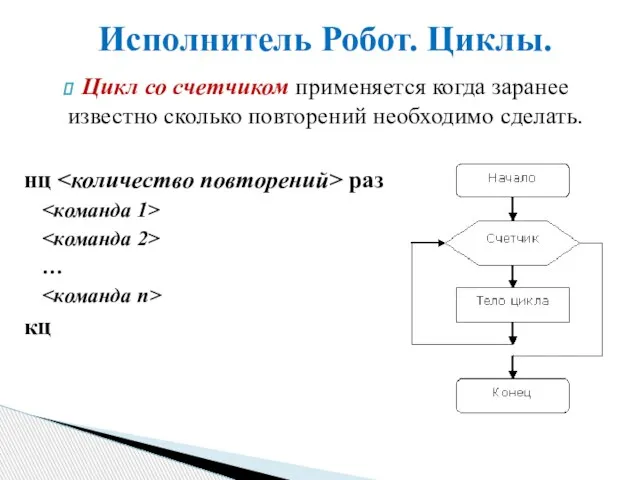 Исполнитель Робот. Циклы
Исполнитель Робот. Циклы Вычислительная практика. Интерфейс
Вычислительная практика. Интерфейс Цифровые образовательные платформы
Цифровые образовательные платформы Переменные и условия
Переменные и условия